s3+stride_sensor_sim
视频图像处理算法opencv在esp32及esp32s3上面的移植
opencv在esp32及esp32s3上面的移植1Opencv简介OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上它轻量级而且高效——由一系列C 函数和少量C++ 类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
这就使我们在esp32上实现OpenCV,进行图像处理以及计算机视觉成为了现实。
2Esp32s3简介ESP32-S3 和ESP32 一样是一款同时支持WIFI和蓝牙功能,可以说是专为物联网而生的一款Soc,应用领域贯穿移动设备、可穿戴电子设备、智能家居等,在2,4GHz 频带支持20MHz和40MHz频宽,和以往ESP32 不一样的是,蓝牙除了支持BLE以外,目前支持Bluetooth 5 和Bluetooth mesh,更多的GPIO口使其能控制的外设达到更多,全速USB OTG支持直接通过USB协议与芯片进行通信。
最主要的是esp32s3具有双核的cpu。
在图像处理方面有着先天的优势。
Core0通常使用作为wifi数据传输的处理。
Core1进行视觉处理进程的运行。
3移植硬件电路设计为实现esp32s3的视频处理的内存需求,我们选用内置8M flash,外扩8M spram 的模组;摄像头采用了ov2640作为输入;另外,为了调试方便,采用了240*240的LCD屏作为显示终端,可以实时看见图像处理结果。
以下是原理图:整体系统效果如下:反面的摄像头以及补光灯:此开发板可以在某宝上面搜索esp32s3 opencv。
4Demo软件效果一、Opencv中的目标拾取代码。
通常,我们在图像处理的时候,需要对采集照片进行灰度处理,然后,对照片进行二值化处理。
进而进行目标拾取。
使用的函数为:Mat inputImage(fb->height, fb->width, CV_8UC2, fb->buf);// rgb565 is 2 channels of 8-bit unsignedcvtColor(inputImage, inputImage, COLOR_BGR5652GRAY);threshold(inputImage, inputImage, 128, 255, THRESH_BINARY);轻松就会得到目标物体:效果如下:开发板中提供demo的源代码,可以使用esp-idf进行编译运行。
Atmel软件框架ASF-3.40文档说明书

The Atmel® Software Framework (ASF, /asf) is a compilation of embedded software for Atmel flash MCUs: megaAVR®, AVR XMEGA®, AVR UC3 and SAM devices. It has been designed to help develop and glue together the different components of a software design. It can easily integrate into an operating system (OS) or run as a stand-alone product.
• Added SAM D20 Services (GFX_mono, Delay, Dataflash, FreeRTOS) • Added SAM D20 applications (DAC sound player, SPI/I2C bootloader, Led toggle d OSC8 calibration,
Installation Instructions
Device Support
This release supports the following devices:
• AVR UC3 • AVR UC3 A0/A1 (revision H and later) • AVR UC3 A3/A4 (revision E and later) • AVR UC3 A3xS/A4xS (revision E and later) • AVR UC3 B (revision F and later) • AVR UC3 C (revision D and later) • AVR UC3 D • AVR UC3 L
恩智浦S32R274汽车雷达处理器应用指南说明书
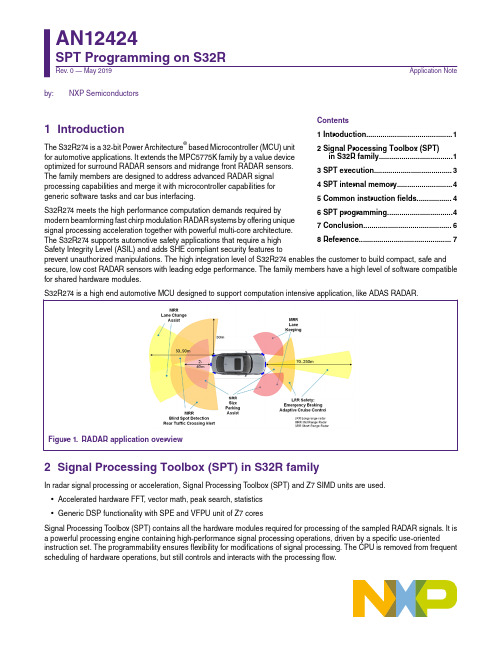
by:NXP Semiconductors1Introduction The S32R274 is a 32-bit Power Architecture ® based Microcontroller (MCU) unitfor automotive applications. It extends the MPC5775K family by a value deviceoptimized for surround RADAR sensors and midrange front RADAR sensors.The family members are designed to address advanced RADAR signalprocessing capabilities and merge it with microcontroller capabilities forgeneric software tasks and car bus interfacing.S32R274 meets the high performance computation demands required by modern beamforming fast chirp modulation RADAR systems by offering unique signal processing acceleration together with powerful multi-core architecture.The S32R274 supports automotive safety applications that require a highSafety Integrity Level (ASIL) and adds SHE compliant security features toprevent unauthorized manipulations. The high integration level of S32R274 enables the customer to build compact, safe and secure, low cost RADAR sensors with leading edge performance. The family members have a high level of software compatible for shared hardware modules.S32R274 is a high end automotive MCU designed to support computation intensive application, like ADAS RADAR.Figure 1.RADAR application overview2Signal Processing Toolbox (SPT) in S32R familyIn radar signal processing or acceleration, Signal Processing T oolbox (SPT) and Z7 SIMD units are used.•Accelerated hardware FFT , vector math, peak search, statistics•Generic DSP functionality with SPE and VFPU unit of Z7 coresSignal Processing T oolbox (SPT) contains all the hardware modules required for processing of the sampled RADAR signals. It is a powerful processing engine containing high-performance signal processing operations, driven by a specific use-orientedinstruction set. The programmability ensures flexibility for modifications of signal processing. The CPU is removed from frequent scheduling of hardware operations, but still controls and interacts with the processing flow.Contents1 Introduction (1)2 Signal Processing Toolbox (SPT)in S32R family....................................13 SPT execution......................................34 SPT internal memory...........................45 Common instruction fields.................46 SPT programming................................47 Conclusion. (6)8 Reference.............................................7AN12424SPT Programming on S32R Rev. 0 — May 2019Application NoteSPT is connected to the device by an advanced high performance master bus and a peripheral bus.Figure 2.SPT in S32R274 block diagramThe system bus master interface performs fast data transfers between external memory and local RAM.The purpose of the peripheral interface is to set configuration, get status information and basic control of SPT (start/stop, program pointer) and to trigger interrupts. It can also be used to exchange small amounts of the data between the CPU and the SPT , such as constant operands.Figure 3.SPT block diagramIt has the following features:•Acquisition of ADC samples—Capturing of ADC samples within programmed window—On-the-fly statistical computation—Supports MIPICSI2 interface•Provides HW acceleration for—FFT (8 - 4096 point)—Histogram calculation—Maximum and peak searchSignal Processing Toolbox (SPT) in S32R family—Mathematical operations on vector data•High-speed DMA data transfer—Supports system RAM, TCM and Flash memory transfers—Includes compression/decompression capability for reduction of storage footprint•Instruction based program flow—High-level commands for signal processing operations—Simple control commands—Local instruction buffer—Automatic instruction fetch from main memory—CPU interaction possible•CPU interruption notification•Watchdog•Debug Support - Single Stepping and Jamming ModeIt has three operation modes:1.STOP mode2.System Debug mode3.Normal mode3SPT executionThe SPT executes a list of instructions. These commands contain all the information to perform signal processing operations on data vectors consisting of a set of numbers. The instruction list is provided by the CPU in a memory buffer (SRAM or flash) and read by the SPT with autonomous triggered DMA operations. Preparation of command scripts is performed off-line duringdevelopment on a different system, such as a PC.Figure 4.SPT operation modelData as results or inputs of signal processing operations can be transferred between operand/twiddle RAM and system RAM or TCM by DMA operations. These kind of DMA operations are also scheduled by commands in the script.CPU application software functions may be invoked between signal processing operations. In order to synchronize these SW functions with the processing flow, interrupts and polling flags are provided, which may be activated as a result of specificcommands. In the same way, eDMA operations can be triggered from the SPT . The data transfer descriptors need to be prepared by application software.T o enable advanced and precisely timed pipelining of HW assisted operations, SPT command execution can also be synchronized with or triggered by events from CTE or MIPICSI2.SPT executionSPT internal memoryProgram execution is performed by a dedicated register machine. The program execution may be stalled at the end of each command and can be synchronized with events provided by the CTE or MIPICSI2. The CPU can stop and release program execution and execute its own instructions in the same time.The SPT command sequence is provided by CPU SW and written to a buffer in the system RAM or flash, where CSDMA fetches or alternatively transfers the list of instructions to the command queue.The program is executed sequentially, one command following the next in the chain with the exception being loops and asynchronous PDMA instruction. The end of a sequence is marked with a specific termination command. The start address of the instruction sequence is configured by application software using the peripheral interface.The command queue stores a number of instructions to be executed, which may be a shorter sequence than the complete instruction list. It maintains an instruction pointer to the current executed operation, which is incremented when the current operation is completed. This instruction pointer indicates the position in the complete instruction list sequence relative to the first instruction.Loop instructions are special cases, the program sequence may continue with a lower address depending on the state of the loop counter. The start and next command address of the loops are saved in special registers. Up to four nested loops are supported. Jump instructions or branch instructions are another case where the program may cause the program to branch to a non-contiguous address location. It is the responsibility of the assembler to ensure that the sanity of the program structure is not violated i.e. infinite loops, jumping into or out of a loop, etc.4SPT internal memorySPT contains internal memory resources namely, Operand RAM, Twiddle RAM and work registers. Out of these, only the work registers can be directly accessed via the peripheral interface and are visible on the SPT external memory map.The CPU can access these internal memory resources via the hardware accelerators. The instruction bitfields SRC_ADD and DEST_ADD point to these memories.The Twiddle RAM extends from location 0x4000 to 0x4FFF. However the area from 0x5000 to 0x7FFF is aliased to the Twiddle RAM i.e. it wraps around to point to the T widdle RAM. It should be noted that the memory accesses to the T widdle RAM should not cross the area from 0x4000 to 0x7FFF.The Operand RAM extends from location 0x8000 to 0xBFFF. But the area from 0xC000 to 0xFFFF is aliased to the Operand RAM. The memory accesses to the Operand RAM should not cross the area from 0x8000 to 0xFFFF.5Common instruction fieldsCommon instructions contains the following fields.•Opcode•Source and Destination address•Indirect Memory address•Source and destination address increment•Vector size•Input datatype/preprocessing6SPT programming6.1Programming based on RSDKNXP Radar SDK(RSDK) provides basic radar processing algorithms and device drivers for S32R hardware devices. Its purpose is to facilitate radar algorithm development (using SPT kernels, MA TLAB models), creation of higher level algorithms (starting from the basic blocks supplied with RSDK) and easy application development by integrating driver and platform support.Radar SDK (Radar SDK for S32R27 SPT accelerator ) could be downloaded from NXP website.RSDK SPT module consists of the SPT Driver, SPT Kernels software components.The SPT Driver serves as an interface between the user application running on the host CPU cores and the SPT hardware. The figure below shows a high-level block diagram of SPT software architecture. Its purpose is to enable the integration and executionof low-level microcode kernels on the SPT (Signal Processing T oolbox) accelerator for baseband radar signal processing.Figure 5.SPT software architectureThe SPT Kernels are individual precompiled routines of SPT code packed into a library, each implementing a part of the radar processing flow.T ogether, the SPT Driver and SPT Kernels library provide a software abstraction of the built-in SPT hardware functions (e.g. FFT ,Maximum Search, Histogram etc.) combined in a series of algorithms.The RSDK package also includes RSDK Sample Applications showing how to integrate these software components into the user code.6.2Programming based on graphic toolS32 Design Studio SPT graphical tool allows user to use graphical modeling workbench by leveraging the Eclipse Modeling technologies. It provides a workbench for model-based architecture engineering. Graphical tool equips teams who have to deal with complex architectures. The graphical tool includes everything necessary to easily create and manipulate models. The output of this tool is SPT assembler source code.The SPT graphical tool is integrated with the New S32DS Project wizard for devices which have SPT module. SPT1, SPT2 and SPT2.5 versions of SPT modules are supported. The SPT graphical tool can be used after project creation with the new graph tools project wizard. For detailed description of new project wizards, please read S32 Design Studio for Power Architecture, Version 2017.R1 reference manual.After the project is generated, SPT graphical tool windows could be gotten in IDE. User could drag 'Instructions', 'Flow' and 'Directives' from Palette window into working flow window.SPT programmingEach 'Instructions', 'Flow' or 'Directives' could change their setting in properties window. After finished the design of SPT working flow, generate SPT code through right click mouse.Figure 6.Generate project with SPT graphical toolFigure 7.SPT graphical tool windowsFigure 8.Example working flow and generate code7ConclusionThe SPT is a powerful processing engine containing high-performance signal processing operations driven by a specific instruction set. Its programmability ensures flexibility while removing the CPU from frequent scheduling of hardware operations, while still controlling and interacting with the processing flow. RSDK supports the API of SPT for customer and graphics tool for SPT programming could meet the flexible design request.8Reference•S32R274 Reference Manual•Radar SDK for S32R27 SPT accelerator •AN5375, S32R RADAR Signal CompressionHow To Reach Us Home Page: Web Support: /support Information in this document is provided solely to enable system and software implementers to use NXP products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits based on the information in this document. NXP reserves the right to make changes without further notice to any products herein.NXP makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does NXP assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in NXP data sheets and/or specifications can and do vary in different applications, and actual performance may vary over time. All operating parameters, including “typicals,” must be validated for each customer application by customer's technical experts. NXP does not convey any license under its patent rights nor the rights of others. NXP sells products pursuant to standard terms and conditions of sale, which can be found at the following address: / SalesTermsandConditions.While NXP has implemented advanced security features, all products may be subject to unidentified vulnerabilities. Customers are responsible for the design and operation of their applications and products to reduce the effect of these vulnerabilities on customer’s applications and products, and NXP accepts no liability for any vulnerability that is discovered. Customers should implement appropriate design and operating safeguards to minimize the risks associated with their applications and products.NXP, the NXP logo, NXP SECURE CONNECTIONS FOR A SMARTER WORLD, COOLFLUX, EMBRACE, GREENCHIP, HIT AG, I2C BUS, ICODE, JCOP, LIFE VIBES, MIFARE, MIFARE CLASSIC, MIFARE DESFire, MIFARE PLUS, MIFARE FLEX, MANTIS, MIFARE ULTRALIGHT, MIFARE4MOBILE, MIGLO, NTAG, ROADLINK, SMARTLX, SMARTMX, ST ARPLUG, TOPFET, TRENCHMOS, UCODE, Freescale, the Freescale logo, AltiVec, C‑5, CodeTEST, CodeWarrior, ColdFire, ColdFire+, C‑Ware, the Energy Efficient Solutions logo, Kinetis, Layerscape, MagniV, mobileGT, PEG, PowerQUICC, Processor Expert, QorIQ, QorIQ Qonverge, Ready Play, SafeAssure, the SafeAssure logo, StarCore, Symphony, VortiQa, Vybrid, Airfast, BeeKit, BeeStack, CoreNet, Flexis, MXC, Platform in a Package, QUICC Engine, SMARTMOS, Tower, TurboLink, and UMEMS are trademarks of NXP B.V. All other product or service names are the property of their respective owners. AMBA, Arm, Arm7, Arm7TDMI, Arm9, Arm11, Artisan, big.LITTLE, Cordio, CoreLink, CoreSight, Cortex, DesignStart, DynamIQ, Jazelle, Keil, Mali, Mbed, Mbed Enabled, NEON, POP, RealView, SecurCore, Socrates, Thumb, TrustZone, ULINK, ULINK2, ULINK-ME, ULINK-PLUS, ULINKpro, µVision, Versatile are trademarks or registered trademarks of Arm Limited (or its subsidiaries) in the US and/or elsewhere. The related technology may be protected by any or all of patents, copyrights, designs and trade secrets. All rights reserved. Oracle and Java are registered trademarks of Oracle and/or its affiliates. The Power Architecture and word marks and the Power and logos and related marks are trademarks and service marks licensed by .© NXP B.V. 2019.All rights reserved.For more information, please visit: Forsalesofficeaddresses,pleasesendanemailto:**********************Date of release: May 2019Document identifier: AN12424。
NuMicro N9H30系列开发板用户手册说明书
NuMicro®FamilyArm® ARM926EJ-S BasedNuMaker-HMI-N9H30User ManualEvaluation Board for NuMicro® N9H30 SeriesNUMAKER-HMI-N9H30 USER MANUALThe information described in this document is the exclusive intellectual property ofNuvoton Technology Corporation and shall not be reproduced without permission from Nuvoton.Nuvoton is providing this document only for reference purposes of NuMicro microcontroller andmicroprocessor based system design. Nuvoton assumes no responsibility for errors or omissions.All data and specifications are subject to change without notice.For additional information or questions, please contact: Nuvoton Technology Corporation.Table of Contents1OVERVIEW (5)1.1Features (7)1.1.1NuMaker-N9H30 Main Board Features (7)1.1.2NuDesign-TFT-LCD7 Extension Board Features (7)1.2Supporting Resources (8)2NUMAKER-HMI-N9H30 HARDWARE CONFIGURATION (9)2.1NuMaker-N9H30 Board - Front View (9)2.2NuMaker-N9H30 Board - Rear View (14)2.3NuDesign-TFT-LCD7 - Front View (20)2.4NuDesign-TFT-LCD7 - Rear View (21)2.5NuMaker-N9H30 and NuDesign-TFT-LCD7 PCB Placement (22)3NUMAKER-N9H30 AND NUDESIGN-TFT-LCD7 SCHEMATICS (24)3.1NuMaker-N9H30 - GPIO List Circuit (24)3.2NuMaker-N9H30 - System Block Circuit (25)3.3NuMaker-N9H30 - Power Circuit (26)3.4NuMaker-N9H30 - N9H30F61IEC Circuit (27)3.5NuMaker-N9H30 - Setting, ICE, RS-232_0, Key Circuit (28)NUMAKER-HMI-N9H30 USER MANUAL3.6NuMaker-N9H30 - Memory Circuit (29)3.7NuMaker-N9H30 - I2S, I2C_0, RS-485_6 Circuit (30)3.8NuMaker-N9H30 - RS-232_2 Circuit (31)3.9NuMaker-N9H30 - LCD Circuit (32)3.10NuMaker-N9H30 - CMOS Sensor, I2C_1, CAN_0 Circuit (33)3.11NuMaker-N9H30 - RMII_0_PF Circuit (34)3.12NuMaker-N9H30 - RMII_1_PE Circuit (35)3.13NuMaker-N9H30 - USB Circuit (36)3.14NuDesign-TFT-LCD7 - TFT-LCD7 Circuit (37)4REVISION HISTORY (38)List of FiguresFigure 1-1 Front View of NuMaker-HMI-N9H30 Evaluation Board (5)Figure 1-2 Rear View of NuMaker-HMI-N9H30 Evaluation Board (6)Figure 2-1 Front View of NuMaker-N9H30 Board (9)Figure 2-2 Rear View of NuMaker-N9H30 Board (14)Figure 2-3 Front View of NuDesign-TFT-LCD7 Board (20)Figure 2-4 Rear View of NuDesign-TFT-LCD7 Board (21)Figure 2-5 Front View of NuMaker-N9H30 PCB Placement (22)Figure 2-6 Rear View of NuMaker-N9H30 PCB Placement (22)Figure 2-7 Front View of NuDesign-TFT-LCD7 PCB Placement (23)Figure 2-8 Rear View of NuDesign-TFT-LCD7 PCB Placement (23)Figure 3-1 GPIO List Circuit (24)Figure 3-2 System Block Circuit (25)Figure 3-3 Power Circuit (26)Figure 3-4 N9H30F61IEC Circuit (27)Figure 3-5 Setting, ICE, RS-232_0, Key Circuit (28)Figure 3-6 Memory Circuit (29)Figure 3-7 I2S, I2C_0, RS-486_6 Circuit (30)Figure 3-8 RS-232_2 Circuit (31)Figure 3-9 LCD Circuit (32)NUMAKER-HMI-N9H30 USER MANUAL Figure 3-10 CMOS Sensor, I2C_1, CAN_0 Circuit (33)Figure 3-11 RMII_0_PF Circuit (34)Figure 3-12 RMII_1_PE Circuit (35)Figure 3-13 USB Circuit (36)Figure 3-14 TFT-LCD7 Circuit (37)List of TablesTable 2-1 LCD Panel Combination Connector (CON8) Pin Function (11)Table 2-2 Three Sets of Indication LED Functions (12)Table 2-3 Six Sets of User SW, Key Matrix Functions (12)Table 2-4 CMOS Sensor Connector (CON10) Function (13)Table 2-5 JTAG ICE Interface (J2) Function (14)Table 2-6 Expand Port (CON7) Function (16)Table 2-7 UART0 (J3) Function (16)Table 2-8 UART2 (J6) Function (16)Table 2-9 RS-485_6 (SW6~8) Function (17)Table 2-10 Power on Setting (SW4) Function (17)Table 2-11 Power on Setting (S2) Function (17)Table 2-12 Power on Setting (S3) Function (17)Table 2-13 Power on Setting (S4) Function (17)Table 2-14 Power on Setting (S5) Function (17)Table 2-15 Power on Setting (S7/S6) Function (18)Table 2-16 Power on Setting (S9/S8) Function (18)Table 2-17 CMOS Sensor Connector (CON9) Function (19)Table 2-18 CAN_0 (SW9~10) Function (19)NUMAKER-HMI-N9H30 USER MANUAL1 OVERVIEWThe NuMaker-HMI-N9H30 is an evaluation board for GUI application development. The NuMaker-HMI-N9H30 consists of two parts: a NuMaker-N9H30 main board and a NuDesign-TFT-LCD7 extensionboard. The NuMaker-HMI-N9H30 is designed for project evaluation, prototype development andvalidation with HMI (Human Machine Interface) function.The NuMaker-HMI-N9H30 integrates touchscreen display, voice input/output, rich serial port serviceand I/O interface, providing multiple external storage methods.The NuDesign-TFT-LCD7 can be plugged into the main board via the DIN_32x2 extension connector.The NuDesign-TFT-LCD7 includes one 7” LCD which the resolution is 800x480 with RGB-24bits andembedded the 4-wires resistive type touch panel.Figure 1-1 Front View of NuMaker-HMI-N9H30 Evaluation BoardNUMAKER-HMI-N9H30 USER MANUAL Figure 1-2 Rear View of NuMaker-HMI-N9H30 Evaluation Board1.1 Features1.1.1 NuMaker-N9H30 Main Board Features●N9H30F61IEC chip: LQFP216 pin MCP package with DDR (64 MB)●SPI Flash using W25Q256JVEQ (32 MB) booting with quad mode or storage memory●NAND Flash using W29N01HVSINA (128 MB) booting or storage memory●One Micro-SD/TF card slot served either as a SD memory card for data storage or SDIO(Wi-Fi) device●Two sets of COM ports:–One DB9 RS-232 port with UART_0 used 75C3232E transceiver chip can be servedfor function debug and system development.–One DB9 RS-232 port with UART_2 used 75C3232E transceiver chip for userapplication●22 GPIO expansion ports, including seven sets of UART functions●JTAG interface provided for software development●Microphone input and Earphone/Speaker output with 24-bit stereo audio codec(NAU88C22) for I2S interfaces●Six sets of user-configurable push button keys●Three sets of LEDs for status indication●Provides SN65HVD230 transceiver chip for CAN bus communication●Provides MAX3485 transceiver chip for RS-485 device connection●One buzzer device for program applicationNUMAKER-HMI-N9H30 USER MANUAL●Two sets of RJ45 ports with Ethernet 10/100 Mbps MAC used IP101GR PHY chip●USB_0 that can be used as Device/HOST and USB_1 that can be used as HOSTsupports pen drives, keyboards, mouse and printers●Provides over-voltage and over current protection used APL3211A chip●Retain RTC battery socket for CR2032 type and ADC0 detect battery voltage●System power could be supplied by DC-5V adaptor or USB VBUS1.1.2 NuDesign-TFT-LCD7 Extension Board Features●7” resolution 800x480 4-wire resistive touch panel for 24-bits RGB888 interface●DIN_32x2 extension connector1.2 Supporting ResourcesFor sample codes and introduction about NuMaker-N9H30, please refer to N9H30 BSP:https:///products/gui-solution/gui-platform/numaker-hmi-n9h30/?group=Software&tab=2Visit NuForum for further discussion about the NuMaker-HMI-N9H30:/viewforum.php?f=31 NUMAKER-HMI-N9H30 USER MANUALNUMAKER-HMI-N9H30 USER MANUAL2 NUMAKER-HMI-N9H30 HARDWARE CONFIGURATION2.1 NuMaker-N9H30 Board - Front View Combination Connector (CON8)6 set User SWs (K1~6)3set Indication LEDs (LED1~3)Power Supply Switch (SW_POWER1)Audio Codec(U10)Microphone(M1)NAND Flash(U9)RS-232 Transceiver(U6, U12)RS-485 Transceiver(U11)CAN Transceiver (U13)Figure 2-1 Front View of NuMaker-N9H30 BoardFigure 2-1 shows the main components and connectors from the front side of NuMaker-N9H30 board. The following lists components and connectors from the front view:NuMaker-N9H30 board and NuDesign-TFT-LCD7 board combination connector (CON8). This panel connector supports 4-/5-wire resistive touch or capacitance touch panel for 24-bits RGB888 interface.Connector GPIO pin of N9H30 FunctionCON8.1 - Power 3.3VCON8.2 - Power 3.3VCON8.3 GPD7 LCD_CSCON8.4 GPH3 LCD_BLENCON8.5 GPG9 LCD_DENCON8.7 GPG7 LCD_HSYNCCON8.8 GPG6 LCD_CLKCON8.9 GPD15 LCD_D23(R7)CON8.10 GPD14 LCD_D22(R6)CON8.11 GPD13 LCD_D21(R5)CON8.12 GPD12 LCD_D20(R4)CON8.13 GPD11 LCD_D19(R3)CON8.14 GPD10 LCD_D18(R2)CON8.15 GPD9 LCD_D17(R1)CON8.16 GPD8 LCD_D16(R0)CON8.17 GPA15 LCD_D15(G7)CON8.18 GPA14 LCD_D14(G6)CON8.19 GPA13 LCD_D13(G5)CON8.20 GPA12 LCD_D12(G4)CON8.21 GPA11 LCD_D11(G3)CON8.22 GPA10 LCD_D10(G2)CON8.23 GPA9 LCD_D9(G1) NUMAKER-HMI-N9H30 USER MANUALCON8.24 GPA8 LCD_D8(G0)CON8.25 GPA7 LCD_D7(B7)CON8.26 GPA6 LCD_D6(B6)CON8.27 GPA5 LCD_D5(B5)CON8.28 GPA4 LCD_D4(B4)CON8.29 GPA3 LCD_D3(B3)CON8.30 GPA2 LCD_D2(B2)CON8.31 GPA1 LCD_D1(B1)CON8.32 GPA0 LCD_D0(B0)CON8.33 - -CON8.34 - -CON8.35 - -CON8.36 - -CON8.37 GPB2 LCD_PWMCON8.39 - VSSCON8.40 - VSSCON8.41 ADC7 XPCON8.42 ADC3 VsenCON8.43 ADC6 XMCON8.44 ADC4 YMCON8.45 - -CON8.46 ADC5 YPCON8.47 - VSSCON8.48 - VSSCON8.49 GPG0 I2C0_CCON8.50 GPG1 I2C0_DCON8.51 GPG5 TOUCH_INTCON8.52 - -CON8.53 - -CON8.54 - -CON8.55 - -NUMAKER-HMI-N9H30 USER MANUAL CON8.56 - -CON8.57 - -CON8.58 - -CON8.59 - VSSCON8.60 - VSSCON8.61 - -CON8.62 - -CON8.63 - Power 5VCON8.64 - Power 5VTable 2-1 LCD Panel Combination Connector (CON8) Pin Function●Power supply switch (SW_POWER1): System will be powered on if the SW_POWER1button is pressed●Three sets of indication LEDs:LED Color DescriptionsLED1 Red The system power will beterminated and LED1 lightingwhen the input voltage exceeds5.7V or the current exceeds 2A.LED2 Green Power normal state.LED3 Green Controlled by GPH2 pin Table 2-2 Three Sets of Indication LED Functions●Six sets of user SW, Key Matrix for user definitionKey GPIO pin of N9H30 FunctionK1 GPF10 Row0 GPB4 Col0K2 GPF10 Row0 GPB5 Col1K3 GPE15 Row1 GPB4 Col0K4 GPE15 Row1 GPB5 Col1K5 GPE14 Row2 GPB4 Col0K6GPE14 Row2GPB5 Col1 Table 2-3 Six Sets of User SW, Key Matrix Functions●NAND Flash (128 MB) with Winbond W29N01HVS1NA (U9)●Microphone (M1): Through Nuvoton NAU88C22 chip sound input●Audio CODEC chip (U10): Nuvoton NAU88C22 chip connected to N9H30 using I2Sinterface–SW6/SW7/SW8: 1-2 short for RS-485_6 function and connected to 2P terminal (CON5and J5)–SW6/SW7/SW8: 2-3 short for I2S function and connected to NAU88C22 (U10).●CMOS Sensor connector (CON10, SW9~10)–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11)–SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensorconnector (CON10)Connector GPIO pin of N9H30 FunctionCON10.1 - VSSCON10.2 - VSSNUMAKER-HMI-N9H30 USER MANUALCON10.3 - Power 3.3VCON10.4 - Power 3.3VCON10.5 - -CON10.6 - -CON10.7 GPI4 S_PCLKCON10.8 GPI3 S_CLKCON10.9 GPI8 S_D0CON10.10 GPI9 S_D1CON10.11 GPI10 S_D2CON10.12 GPI11 S_D3CON10.13 GPI12 S_D4CON10.14 GPI13 S_D5CON10.15 GPI14 S_D6CON10.16 GPI15 S_D7CON10.17 GPI6 S_VSYNCCON10.18 GPI5 S_HSYNCCON10.19 GPI0 S_PWDNNUMAKER-HMI-N9H30 USER MANUAL CON10.20 GPI7 S_nRSTCON10.21 GPG2 I2C1_CCON10.22 GPG3 I2C1_DCON10.23 - VSSCON10.24 - VSSTable 2-4 CMOS Sensor Connector (CON10) FunctionNUMAKER-HMI-N9H30 USER MANUAL2.2NuMaker-N9H30 Board - Rear View5V In (CON1)RS-232 DB9 (CON2,CON6)Expand Port (CON7)Speaker Output (J4)Earphone Output (CON4)Buzzer (BZ1)System ResetSW (SW5)SPI Flash (U7,U8)JTAG ICE (J2)Power ProtectionIC (U1)N9H30F61IEC (U5)Micro SD Slot (CON3)RJ45 (CON12, CON13)USB1 HOST (CON15)USB0 Device/Host (CON14)CAN_0 Terminal (CON11)CMOS Sensor Connector (CON9)Power On Setting(SW4, S2~S9)RS-485_6 Terminal (CON5)RTC Battery(BT1)RMII PHY (U14,U16)Figure 2-2 Rear View of NuMaker-N9H30 BoardFigure 2-2 shows the main components and connectors from the rear side of NuMaker-N9H30 board. The following lists components and connectors from the rear view:● +5V In (CON1): Power adaptor 5V input ●JTAG ICE interface (J2) ConnectorGPIO pin of N9H30Function J2.1 - Power 3.3V J2.2 GPJ4 nTRST J2.3 GPJ2 TDI J2.4 GPJ1 TMS J2.5 GPJ0 TCK J2.6 - VSS J2.7 GPJ3 TD0 J2.8-RESETTable 2-5 JTAG ICE Interface (J2) Function●SPI Flash (32 MB) with Winbond W25Q256JVEQ (U7); only one (U7 or U8) SPI Flashcan be used●System Reset (SW5): System will be reset if the SW5 button is pressed●Buzzer (BZ1): Control by GPB3 pin of N9H30●Speaker output (J4): Through the NAU88C22 chip sound output●Earphone output (CON4): Through the NAU88C22 chip sound output●Expand port for user use (CON7):Connector GPIO pin of N9H30 FunctionCON7.1 - Power 3.3VCON7.2 - Power 3.3VCON7.3 GPE12 UART3_TXDCON7.4 GPH4 UART1_TXDCON7.5 GPE13 UART3_RXDCON7.6 GPH5 UART1_RXDCON7.7 GPB0 UART5_TXDCON7.8 GPH6 UART1_RTSCON7.9 GPB1 UART5_RXDCON7.10 GPH7 UART1_CTSCON7.11 GPI1 UART7_TXDNUMAKER-HMI-N9H30 USER MANUAL CON7.12 GPH8 UART4_TXDCON7.13 GPI2 UART7_RXDCON7.14 GPH9 UART4_RXDCON7.15 - -CON7.16 GPH10 UART4_RTSCON7.17 - -CON7.18 GPH11 UART4_CTSCON7.19 - VSSCON7.20 - VSSCON7.21 GPB12 UART10_TXDCON7.22 GPH12 UART8_TXDCON7.23 GPB13 UART10_RXDCON7.24 GPH13 UART8_RXDCON7.25 GPB14 UART10_RTSCON7.26 GPH14 UART8_RTSCON7.27 GPB15 UART10_CTSCON7.28 GPH15 UART8_CTSCON7.29 - Power 5VCON7.30 - Power 5VTable 2-6 Expand Port (CON7) Function●UART0 selection (CON2, J3):–RS-232_0 function and connected to DB9 female (CON2) for debug message output.–GPE0/GPE1 connected to 2P terminal (J3).Connector GPIO pin of N9H30 Function J3.1 GPE1 UART0_RXDJ3.2 GPE0 UART0_TXDTable 2-7 UART0 (J3) Function●UART2 selection (CON6, J6):–RS-232_2 function and connected to DB9 female (CON6) for debug message output –GPF11~14 connected to 4P terminal (J6)Connector GPIO pin of N9H30 Function J6.1 GPF11 UART2_TXDJ6.2 GPF12 UART2_RXDJ6.3 GPF13 UART2_RTSJ6.4 GPF14 UART2_CTSTable 2-8 UART2 (J6) Function●RS-485_6 selection (CON5, J5, SW6~8):–SW6~8: 1-2 short for RS-485_6 function and connected to 2P terminal (CON5 and J5) –SW6~8: 2-3 short for I2S function and connected to NAU88C22 (U10)Connector GPIO pin of N9H30 FunctionSW6:1-2 shortGPG11 RS-485_6_DISW6:2-3 short I2S_DOSW7:1-2 shortGPG12 RS-485_6_ROSW7:2-3 short I2S_DISW8:1-2 shortGPG13 RS-485_6_ENBSW8:2-3 short I2S_BCLKNUMAKER-HMI-N9H30 USER MANUALTable 2-9 RS-485_6 (SW6~8) FunctionPower on setting (SW4, S2~9).SW State FunctionSW4.2/SW4.1 ON/ON Boot from USB SW4.2/SW4.1 ON/OFF Boot from eMMC SW4.2/SW4.1 OFF/ON Boot from NAND Flash SW4.2/SW4.1 OFF/OFF Boot from SPI Flash Table 2-10 Power on Setting (SW4) FunctionSW State FunctionS2 Short System clock from 12MHzcrystalS2 Open System clock from UPLL output Table 2-11 Power on Setting (S2) FunctionSW State FunctionS3 Short Watchdog Timer OFFS3 Open Watchdog Timer ON Table 2-12 Power on Setting (S3) FunctionSW State FunctionS4 Short GPJ[4:0] used as GPIO pinS4Open GPJ[4:0] used as JTAG ICEinterfaceTable 2-13 Power on Setting (S4) FunctionSW State FunctionS5 Short UART0 debug message ONS5 Open UART0 debug message OFFTable 2-14 Power on Setting (S5) FunctionSW State FunctionS7/S6 Short/Short NAND Flash page size 2KBS7/S6 Short/Open NAND Flash page size 4KBS7/S6 Open/Short NAND Flash page size 8KBNUMAKER-HMI-N9H30 USER MANUALS7/S6 Open/Open IgnoreTable 2-15 Power on Setting (S7/S6) FunctionSW State FunctionS9/S8 Short/Short NAND Flash ECC type BCH T12S9/S8 Short/Open NAND Flash ECC type BCH T15S9/S8 Open/Short NAND Flash ECC type BCH T24S9/S8 Open/Open IgnoreTable 2-16 Power on Setting (S9/S8) FunctionCMOS Sensor connector (CON9, SW9~10)–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11).–SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensorconnector (CON9).Connector GPIO pin of N9H30 FunctionCON9.1 - VSSCON9.2 - VSSCON9.3 - Power 3.3VCON9.4 - Power 3.3V NUMAKER-HMI-N9H30 USER MANUALCON9.5 - -CON9.6 - -CON9.7 GPI4 S_PCLKCON9.8 GPI3 S_CLKCON9.9 GPI8 S_D0CON9.10 GPI9 S_D1CON9.11 GPI10 S_D2CON9.12 GPI11 S_D3CON9.13 GPI12 S_D4CON9.14 GPI13 S_D5CON9.15 GPI14 S_D6CON9.16 GPI15 S_D7CON9.17 GPI6 S_VSYNCCON9.18 GPI5 S_HSYNCCON9.19 GPI0 S_PWDNCON9.20 GPI7 S_nRSTCON9.21 GPG2 I2C1_CCON9.22 GPG3 I2C1_DCON9.23 - VSSCON9.24 - VSSTable 2-17 CMOS Sensor Connector (CON9) Function●CAN_0 Selection (CON11, SW9~10):–SW9~10: 1-2 short for CAN_0 function and connected to 2P terminal (CON11) –SW9~10: 2-3 short for CMOS sensor function and connected to CMOS sensor connector (CON9, CON10)SW GPIO pin of N9H30 FunctionSW9:1-2 shortGPI3 CAN_0_RXDSW9:2-3 short S_CLKSW10:1-2 shortGPI4 CAN_0_TXDSW10:2-3 short S_PCLKTable 2-18 CAN_0 (SW9~10) Function●USB0 Device/HOST Micro-AB connector (CON14), where CON14 pin4 ID=1 is Device,ID=0 is HOST●USB1 for USB HOST with Type-A connector (CON15)●RJ45_0 connector with LED indicator (CON12), RMII PHY with IP101GR (U14)●RJ45_1 connector with LED indicator (CON13), RMII PHY with IP101GR (U16)●Micro-SD/TF card slot (CON3)●SOC CPU: Nuvoton N9H30F61IEC (U5)●Battery power for RTC 3.3V powered (BT1, J1), can detect voltage by ADC0●RTC power has 3 sources:–Share with 3.3V I/O power–Battery socket for CR2032 (BT1)–External connector (J1)●Board version 2.1NUMAKER-HMI-N9H30 USER MANUAL2.3 NuDesign-TFT-LCD7 -Front ViewFigure 2-3 Front View of NuDesign-TFT-LCD7 BoardFigure 2-3 shows the main components and connectors from the Front side of NuDesign-TFT-LCD7board.7” resolution 800x480 4-W resistive touch panel for 24-bits RGB888 interface2.4 NuDesign-TFT-LCD7 -Rear ViewFigure 2-4 Rear View of NuDesign-TFT-LCD7 BoardFigure 2-4 shows the main components and connectors from the rear side of NuDesign-TFT-LCD7board.NuMaker-N9H30 and NuDesign-TFT-LCD7 combination connector (CON1).NUMAKER-HMI-N9H30 USER MANUAL 2.5 NuMaker-N9H30 and NuDesign-TFT-LCD7 PCB PlacementFigure 2-5 Front View of NuMaker-N9H30 PCB PlacementFigure 2-6 Rear View of NuMaker-N9H30 PCB PlacementNUMAKER-HMI-N9H30 USER MANUALFigure 2-7 Front View of NuDesign-TFT-LCD7 PCB PlacementFigure 2-8 Rear View of NuDesign-TFT-LCD7 PCB Placement3 NUMAKER-N9H30 AND NUDESIGN-TFT-LCD7 SCHEMATICS3.1 NuMaker-N9H30 - GPIO List CircuitFigure 3-1 shows the N9H30F61IEC GPIO list circuit.Figure 3-1 GPIO List Circuit NUMAKER-HMI-N9H30 USER MANUAL3.2 NuMaker-N9H30 - System Block CircuitFigure 3-2 shows the System Block Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-2 System Block Circuit3.3 NuMaker-N9H30 - Power CircuitFigure 3-3 shows the Power Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-3 Power Circuit3.4 NuMaker-N9H30 - N9H30F61IEC CircuitFigure 3-4 shows the N9H30F61IEC Circuit.Figure 3-4 N9H30F61IEC CircuitNUMAKER-HMI-N9H30 USER MANUAL3.5 NuMaker-N9H30 - Setting, ICE, RS-232_0, Key CircuitFigure 3-5 shows the Setting, ICE, RS-232_0, Key Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-5 Setting, ICE, RS-232_0, Key Circuit3.6 NuMaker-N9H30 - Memory CircuitFigure 3-6 shows the Memory Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-6 Memory Circuit3.7 NuMaker-N9H30 - I2S, I2C_0, RS-485_6 CircuitFigure 3-7 shows the I2S, I2C_0, RS-486_6 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-7 I2S, I2C_0, RS-486_6 Circuit3.8 NuMaker-N9H30 - RS-232_2 CircuitFigure 3-8 shows the RS-232_2 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-8 RS-232_2 Circuit3.9 NuMaker-N9H30 - LCD CircuitFigure 3-9 shows the LCD Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-9 LCD Circuit3.10 NuMaker-N9H30 - CMOS Sensor, I2C_1, CAN_0 CircuitFigure 3-10 shows the CMOS Sensor,I2C_1, CAN_0 Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-10 CMOS Sensor, I2C_1, CAN_0 Circuit3.11 NuMaker-N9H30 - RMII_0_PF CircuitFigure 3-11 shows the RMII_0_RF Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-11 RMII_0_PF Circuit3.12 NuMaker-N9H30 - RMII_1_PE CircuitFigure 3-12 shows the RMII_1_PE Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-12 RMII_1_PE Circuit3.13 NuMaker-N9H30 - USB CircuitFigure 3-13 shows the USB Circuit.NUMAKER-HMI-N9H30 USER MANUALFigure 3-13 USB Circuit3.14 NuDesign-TFT-LCD7 - TFT-LCD7 CircuitFigure 3-14 shows the TFT-LCD7 Circuit.Figure 3-14 TFT-LCD7 CircuitNUMAKER-HMI-N9H30 USER MANUAL4 REVISION HISTORYDate Revision Description2022.03.24 1.00 Initial version NUMAKER-HMI-N9H30 USER MANUALNUMAKER-HMI-N9H30 USER MANUALImportant NoticeNuvoton Products are neither intended nor warranted for usage in systems or equipment, anymalfunction or failure of which may cause loss of human life, bodily injury or severe propertydamage. Such applications are deemed, “Insecure Usage”.Insecure usage includes, but is not limited to: equipment for surgical implementation, atomicenergy control instruments, airplane or spaceship instruments, the control or operation ofdynamic, brake or safety systems designed for vehicular use, traffic signal instruments, all typesof safety devices, and other applications intended to support or sustain life.All Insecure Usage shall be made at customer’s risk, and in the event that third parties lay claimsto Nuvoton as a result of customer’s Insecure Usage, custome r shall indemnify the damagesand liabilities thus incurred by Nuvoton.。
cvstartfindcontours_impl参数-概述说明以及解释
cvstartfindcontours_impl参数-概述说明以及解释1.引言1.1 概述在计算机视觉领域,cvstartfindcontours_impl参数被广泛应用于边缘检测和对象识别任务中。
该参数是OpenCV库中cvFindContours()函数的一个重要参数,用于指定边缘检测算法的参数设置。
边缘检测是图像处理中的一项基础任务,它的目标是通过寻找图像中不连续的像素值边界,来获取目标对象的轮廓。
而cvstartfindcontours_impl参数的作用就是对这个过程进行控制和调节,以提高边缘检测的准确性和效率。
cvstartfindcontours_impl参数可以用来调整边缘检测算法的灵敏度,从而适应不同类型的图像和目标对象。
通过设置合适的参数值,我们可以在满足实际应用需求的同时,尽可能地减少边缘检测中的噪声干扰和漏检现象。
这个参数的应用领域非常广泛。
例如,在工业产品质检中,可以利用cvstartfindcontours_impl参数来提取产品的外轮廓,并进一步判断是否存在缺陷或不良现象。
在医学影像处理中,cvstartfindcontours_impl参数可以用于检测病变区域的边缘,从而辅助医生进行疾病诊断和治疗方案的制定。
总之,cvstartfindcontours_impl参数在计算机视觉领域具有重要的意义和应用价值。
它通过调节边缘检测算法的参数,可以提高边缘检测的准确性和稳定性,为后续的图像处理任务提供可靠的基础。
随着计算机视觉技术的不断发展和进步,我们相信cvstartfindcontours_impl参数将会有更多的优化和改进空间,并在更多应用场景中发挥重要作用。
1.2文章结构文章结构部分的内容:在本文中,我们将探讨cvstartfindcontours_impl参数的作用及其重要性。
首先,我们将简要介绍背景知识,以便读者了解该参数的应用背景。
接下来,我们将详细讨论cvstartfindcontours_impl参数在图像处理中的作用及其具体功能。
python实现卷积码译码
python实现卷积码译码从一个通道的图片进行卷积生成新的单通道图的过程很容易理解,对于多个通道卷积后生成多个通道的图理解起来有点抽象。
本文以通俗易懂的方式讲述卷积,并辅以图片解释,能快速理解卷积的实现原理。
最后手写python代码实现卷积过程,让Tensorflow卷积在我们面前不再是黑箱子!注意:本文只针对batch_size=1,padding='SAME',stride=[1,1,1,1]进行实验和解释,其他如果不是这个参数设置,原理也是一样。
1 Tensorflow卷积实现原理先看一下卷积实现原理,对于in_c个通道的输入图,如果需要经过卷积后输出out_c个通道图,那么总共需要in_c * out_c个卷积核参与运算。
输入为[h:5,w:5,c:4],那么对应输出的每个通道,需要4个卷积核。
上图中,输出为3个通道,所以总共需要3*4=12个卷积核。
对于单个输出通道中的每个点,取值为对应的一组4个不同的卷积核经过卷积计算后的和。
接下来,我们以输入为2个通道宽高分别为5的输入、3*3的卷积核、1个通道宽高分别为5的输出,作为一个例子展开。
2个通道,5*5的输入定义如下:#输入,shape=[c,h,w]input_data=[[[1,0,1,2,1],[0,2,1,0,1],[1,1,0,2,0],[2,2,1,1,0],[2,0,1,2,0]],[[2,0,2,1,1],[0,1,0,0,2],[1,0,0,2,1],[1,1,2,1,0],[1,0,1,1,1]],]对于输出为1通道map,根据前面计算方法,需要2*1个卷积核。
定义卷积核如下:#卷积核,shape=[in_c,k,k]=[2,3,3]weights_data=[[[ 1, 0, 1],[-1, 1, 0],[ 0,-1, 0]],[[-1, 0, 1],[ 0, 0, 1],[ 1, 1, 1]]]上面定义的数据,在接下来的计算对应关系将按所描述的方式进行。
RCX5_sim

2
RCX5 中文用户手册
5
6 6 6
8 8 8 8 8
10 10 10 10 10 11 11 11
13 13 13 14 14 16 16 16 17 17 17 17 17 18 18 18 18 20 21
13. 重要数据 产品保养 服务
更换电池 自行更换电池
RCX5 的电池寿命 3
RCX5 中文用户手册
27 27
28 28 28 29 30 31 31 32 33 33 33 34 35 35 35 35 35
37 37 37 37 38 39
41 41 41
42 42 42 42 43
44 44 45 45 47 47 48 50 50 51
网上服务 网上服务是专为你支持你的训练目的而设的。在这里,你可以
建立及把 Polar 耐力训练计划下载至你的训练心率表,及在训练时运用它们。 把你的训练档案储存,以作长期跟进之用。 在训练日志分析及跟进你的进度。 利用训练负苛特性分析训练强度及所需的恢复时间。 挑战你的朋友参与虚拟运动比赛,及与其他运动爱好者互动。 所有来自兼容传感器的数据均以 Polar 专有科技 2.4GHz W.I.N.D.科技以无线方式传输到训练心 率表。这可以减低于训练时的干扰。于游泳时,数据会以 Polar 专有科技 5kHz 科技由 Polar WearLink®+两栖心率传输器传送至训练心率表。 请于 http://register.polar.fi/登记你的 Polar 产品,使我们可以继续改善我们的产品及服务,以达 致你的要求。 你的 Polar 账户名称是你的电邮地址。相同的帐户名称及密码可以用于 Polar 产品登记、 、Polar 讨论区及登记通讯。 可选配件
SimSST数据包说明书
Package‘SimSST’January9,2023Title Simulated Stop Signal Task DataVersion0.0.5.2Description Stop signal task data of go and stop trials is generated per participant.The simula-tion process is based on the generally non-independent horse race model andfixed stop sig-nal delay or tracking method.Each of go and stop process is assumed having exponentially mod-ified Gaussian(ExG)or Shifted Wald(SW)distributions.The output data can be con-verted to'BEESTS'software input data enabling researchers to test and evaluate vari-ous brain stopping processes manifested by ExG or SW distributional parameters of inter-est.Methods are described in:Soltanifar M(2020)<https:///1807/101208>,Matzke D,Love J,Wiecki TV,Brown SD,Lo-gan GD and Wagenmakers E-J(2013)<doi:10.3389/fpsyg.2013.00918>,Lo-gan GD,Van Zandt T,Verbruggen F,Wagenmakers EJ.(2014)<doi:10.1037/a0035230>. License GPL-3Encoding UTF-8RoxygenNote7.1.2Imports dplyr,gamlss.dist,MASS,statsSuggests knitr,rmarkdownVignetteBuilder knitrNeedsCompilation noAuthor Mohsen Soltanifar[aut](<https:///0000-0002-5989-0082>), Chel Hee Lee[cre,aut](<https:///0000-0001-8209-8176>)Maintainer Chel Hee Lee<***********************>Repository CRANDate/Publication2023-01-0917:20:02UTCR topics documented:simssfixed (2)simssgen (3)simsstrack (4)Index712simssfixed simssfixed Simulatng SSRT data usingfixed SSD methodsDescriptionStop signal task data of go and stop trials is generated per participant.Thefixed stop signal delay method with underlying exponentially modified Gaussian(ExG)or Shifted Wald(SW)distributions for each of go and stop process is applied.The output data can be converted to’BEESTS’software input data enabling researchers to test and evaluate different distributional parameters of interest.Usagesimssfixed(pid,block,n,m,SSD.b,dist.go,theta.go,dist.stop,theta.stop)Argumentspid character vector of size b of participantblock numeric vector of size b blocksn numeric vector of size b of total number of trialsm numeric vector of size b of total number of stopsSSD.b numeric vector of size b of stop signal delaydist.go character vector of size b of distribution of go trials,either ExG or SWtheta.go numeric matrix of size b by columns of mu.go,sigma.go,and tau.godist.stop character vector of size b of distribution of stop.trials,either ExG or SWtheta.stop numeric matrix of size b by columns of mu.stop,sigma.stop,and tau.stopValuematrix with sum(n)rows and8columnsReferencesGordon D.Logan.On the Ability to Inhibit Thought and Action:A User’s Guide to the Stop Signal Paradigm.In D.Dagenbach,&T.H.Carr(Eds.),Inhibitory Process in Attention,Memory and Language.San Diego:Academic Press,1994.Dora Matzke,Jonathon Love,Thomas V.Wiecki,Scott D.Brown,and et al.Release the BEESTS: Bayesian Estimation of Ex-Gaussian Stop Signal Reaction Times Distributions.Frontiers in Psy-chology,4:Article918,2013.Mohsen Soltanifar.Stop Signal Reaction Times:New Estimations with Longitudinal,Bayesian and Time Series based Methods,PhD Dissertation,Biostatistics Division,Dalla Lana School of Public Health,University of Toronto,Toronto,Canada,2020.simssgen3ExamplesmySSTdata1<-simssfixed(pid=c("John.Smith","Jane.McDonald","Jane.McDonald"),n=c(50,100,150),m=c(10,20,30),SSD.b=c(200,220,240),dist.go=c("ExG","ExG","ExG"),theta.go=as.matrix(rbind(c(400,60,30),c(440,90,90),c(440,90,90))),dist.stop=c("ExG","ExG","ExG"),theta.stop=as.matrix(rbind(c(100,70,60),c(120,80,70),c(120,80,70))),block=c(1,1,2))mySSTdata1simssgen Simulating correlated SST data using general tracking methodDescriptionStop signal task data of go and stop trials is generated per participant.The tracking signal delay method with underlying exponentially modified Gaussian(ExG)or Shifted Wald(SW)distributions for each of go and stop process is applied.The output data can be converted to’BEESTS’software input data enabling researchers to test and evaluate different distributional parameters of interest. Usagesimssgen(pid,block,n,m,SSD.b,dist.go,theta.go,dist.stop,theta.stop,rho,d)Argumentspid a character vector of size b of participantblock a numeric vector of size b blocksn a numeric vector of size b of total number of trialsm a numeric vector of size b of total number of stopsSSD.b a numeric vector of size b of starting stop signal delaydist.go a character vector of size b of distribution of go trials,either ExG or SWtheta.go a numeric matrix of size b by columns mu.go,sigma.go,tau.godist.stop a character vector of size b of distribution of stop.trials,either ExG or SW theta.stop a numeric matrix of size b by columns mu.stop,sigma.stop,tau.stoprho a numeric vector of size b of Spearman correlation between GORT and SSRT in range-1to+1d a numeric vector of size b of added constant value to subsequent stop trials SSDValuea matrix with sum(n)rows and(8)columnsReferencesGordon D.Logan.On the Ability to Inhibit Thought and Action:A User’s Guide to the Stop Signal Paradigm.In D.Dagenbach,&T.H.Carr(Eds.),Inhibitory Process in Attention,Memory and Language.San Diego:Academic Press,1994.Dora Matzke,Jonathon Love,Thomas V.Wiecki,Scott D.Brown,and et al.Release the BEESTS: Bayesian Estimation of Ex-Gaussian Stop Signal Reaction Times Distributions.Frontiers in Psy-chology,4:Article918,2013.Mohsen Soltanifar.Stop Signal Reaction Times:New Estimations with Longitudinal,Bayesian and Time Series based Methods,PhD Dissertation,Biostatistics Division,Dalla Lana School of Public Health,University of Toronto,Toronto,Canada,2020.ExamplesmySSTdata1<-simssgen(pid=c("John.Smith","Jane.McDonald","Jane.McDonald"),block=c(1,1,2),n=c(50,100,150),m=c(10,20,30),SSD.b=c(200,220,240),dist.go=c("ExG","ExG","ExG"),theta.go=as.matrix(rbind(c(400,60,30),c(440,90,90),c(440,90,90))),dist.stop=c("ExG","ExG","ExG"),theta.stop=as.matrix(rbind(c(100,70,60),c(120,80,70),c(120,80,70))),rho=c(0.35,0.45,0.45),d=c(50,65,75))mySSTdata1simsstrack Simulating SSRT data using tracking methodDescriptionStop signal task data of go and stop trials is generated per participant.The tracking signal delay method with underlying exponentially modified Gaussian(ExG)or Shifted Wald(SW)distributions for each of go and stop process is applied.The output data can be converted to’BEESTS’software input data enabling researchers to test and evaluate different distributional parameters of interest.Usagesimsstrack(pid,block,n,m,SSD.b,dist.go,theta.go,dist.stop,theta.stop)Argumentspid a character vector of size b of participantblock a numeric vector of size b blocksn a numeric vector of size b of total number of trialsm a numeric vector of size b of total number of stopsSSD.b a numeric vector of size b of starting stop signal delaydist.go a character vector of size b of distribution of go trials,either ExG or SWtheta.go a numeric matrix of size b by columns mu.go,sigma.go,tau.godist.stop a character vector of size b of distribution of stop.trials,either ExG or SW theta.stop a numeric matrix of size b by columns mu.stop,sigma.stop,tau.stopValuea matrix with sum(n)rows and(8)columnsReferencesGordon D.Logan.On the Ability to Inhibit Thought and Action:A User’s Guide to the Stop Signal Paradigm.In D.Dagenbach,&T.H.Carr(Eds.),Inhibitory Process in Attention,Memory and Language.San Diego:Academic Press,1994.Dora Matzke,Jonathon Love,Thomas V.Wiecki,Scott D.Brown,and et al.Release the BEESTS: Bayesian Estimation of Ex-Gaussian Stop Signal Reaction Times Distributions.Frontiers in Psy-chology,4:Article918,2013.Mohsen Soltanifar.Stop Signal Reaction Times:New Estimations with Longitudinal,Bayesian and Time Series based Methods,PhD Dissertation,Biostatistics Division,Dalla Lana School of Public Health,University of Toronto,Toronto,Canada,2020.ExamplesmySSTdata1<-simsstrack(pid=c("John.Smith","Jane.McDonald","Jane.McDonald"),block=c(1,1,2),n=c(50,100,150),m=c(10,20,30),SSD.b=c(200,220,240),dist.go=c("ExG","ExG","ExG"),theta.go=as.matrix.data.frame(rbind(c(400,60,30),c(440,90,90),c(440,90,90))),dist.stop=c("ExG","ExG","ExG"),theta.stop=as.matrix.data.frame(rbind(c(100,70,60),c(120,80,70),c(120,80,70)))) mySSTdata1Indexsimssfixed,2simssgen,3simsstrack,47。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P o l a r s3+步速传感器中文用户手册
恭喜你!Polar s3+步速传感器W.I.N.D.是你改善跑步技巧及效率的最佳的选择。
利用敏感的惯性传感器 (inertial sensor)以追踪你双脚的位置,可免除讯号流失及提供准确及高响应性的速度、距离、步频及步距的量度。
最新版本的英文用户手册可于www.polar.fi/support下载。
网上亦有英文版的教学影片提供:
www.polar.fi/en/support/video_tutorials。
请参阅于首页的图画。
安装步速传感器电池
在首次使用s3+步速传感器前,你需要安装电池 (已随产品附上)。
1. 利用一个硬币,逆时针方向扭动以打开电池盖 (如图一)。
2. 把电池放置于电池盖内,正极 (+)面朝电池盖 (如图二)。
确保防
水圈在凹槽内以免影响防水性。
3. 把已装上电池的电池盖放回传感器。
4. 按着电池盖并且以顺时针方向,利用硬币扭动,由OPEN (打开)
至CLOSE (关上) (如图三)。
配对新的步速传感器至你的心率表
新的s3+步速传感器须先与Polar心率表配对,从而使其能够分析您的跑步技巧。
此过程称为Teaching。
如需了解更多,请查阅心率表的用户手册或浏览www.polar.fi/support。
( s3+步速传感器可系于鞋带上或置于特定的跑鞋内的凹槽中。
把步速传感器可系于鞋带上
1. 先松开你的鞋带,并把固定器放于鞋舌 (如图4)。
确保固定器的
扣带是朝向上的。
2. 重新系好鞋带,并把鞋带穿过固定器底部的穿孔 (如图4) . 确保
在跑步时固定器不会移动。
3. 拉紧鞋带。
4. 把传感器的前半部份放入固定器,然后用力按后半部份 (如图
5)。
扣好扣带。
5. 确保传感器不会移动及与你的足部成一直线。
传感器越稳定,所
监测到的速度及距离越准确。
校准S3步速传感器
校准步速传感器可改善速度、步频以及距离测量的准确性。
建议 1.) 首次使用步速传感器时; 2.) 跑步方式发生显著变化时; 3.)或步速传感器在鞋上的位置明显改变时(如穿着新鞋或把传感器从左脚改放于右脚),都需要校准步速传感器。
您可以通过跑一段已知距离或手动设置校准因子。
较准需在一般的跑速下进行。
如果你以不同的速度跑步,请使用你的平均速度进行校准。
训练期间校准步速传感器 (快速校准):可在训练时间(具有实际距离修正)的任何阶段校准步速传感器。
当您已跑一段已知距离(建议超过1000米)后,根据Polar产品用户手册的指示校准步速传感器。
手动设置校准因子:校准因子是根据实际距离与未校准距离的比率计算。
例如,如果您跑1200m,而Polar产品显示距离为1180m,则校
准因子为1.000。
按照以下方式计算新的因
子:.000*1200/1180=1.017。
因子的测量范围为0.500-1.500。
服务
两年质量 / 保证期限内,我们建议您在授权的Polar客户服中心接受产品的售后服务。
质量保证不涵盖非Polar电子授权的服务导致产品损坏或从属损坏。
更换电池:请按照提供的指导自行更换步速传感器的电池。
为确保电池盖的最长使用寿命,仅在更换电池时打开电池盖。
更换电池时,请确保密封圈无损坏。
部份国家的具规模的零售商或Polar客服中心可提供配备防水圈的电池套装。
美国和加拿大地区,只有获授权的Polar客户服务中心可提供密封圈。
如果您需要Polar更换电池,请联系获授权的Polar客户服务中心。
客户服务中心将会在更换电池后,为您测试步速传感器。
请将电池远离儿童。
如误吞电池,请立即求医。
请根据地方法规正确处理电池。
保养与维护
对我们而言,您的安全是最为重要的。
步速传感器的设计可将传感器卡住其他物品的可能性减到最低。
在一些情况下,例如是佩戴步速传感器在灌木丛中奔跑时,请特别小心。
Polar s3+步速传感器可防水,并能在雨中安全使用。
步速传感器并非用于水中活动,因而不得将步速传感器浸入水中。
不要长时间把步速传感器放置于阳光下。
请将步速传感器放置在阴凉干爽的地方。
不得将步速传感器放置在潮湿环境,或不透气材料(塑料袋或运动包)或导电性材料中(湿毛巾)。
技术规格
电池寿命:平均200小时
电池种类:CR2430
电池防水圈:O-橡胶圈 25.0 x 1.2, 硅树脂
操作温度:-10℃至+50℃/+14℉至+122℉
精确度:+/- 3%或校准后更佳 (以稳定的环境计算)
Polar 有限质量国际保用
∙本保用不会影响客户可享有的国家或地方法律权利,或客户与零售商间的销售/采购契约。
∙本Polar有限质量国际保用,由Polar Electro Inc.公司颁发给在美国或者加拿大购买本产品的消费者。
这Polar有限质量国际保用由Polar Electro Oy 公司颁发给在其他国家购买本产品的消费
者。
∙Polar Electro Inc. /Polar Electro Oy公司向本产品的原消费者/购买者保证,自购买之日起两年内,本产品的质料及工艺将不会出现任何缺陷。
∙请保留收据,以作为你的购买凭证!
∙质量保证不包括电池预期损耗、撕裂及任何损坏基于不正确使用、意外或不跟随预防措施;不正确维修,商业使用以致撕裂、折断或刮花画面,手带及弹性胶带都不会受到质量保证∙使用本产品所产生的或与其相关的直接或间接、意外或特殊的损害、损失与费用不在质量保证卡涵盖的范围内。
∙二手购买的产品并不在两年保修的保用范围内。
如与购买地的法律有所抵触除外。
∙在保修期间,本产品可享有由经授权的客户服务中心提供的免费维修及更换服务,不受国家地域所限。
保用只限于该产品有于当地市场出售。
责任声明
∙本手册所载数据仅供参考。
所述产品可能会因为生产商的持续研发计划而有所变动,毋需事先做出通知。
∙Polar Electro Inc. /Polar Electro Oy公司一概不就本手册或其所述产品作出任何声明与保证。
∙Polar Electro Inc. /Polar Electro Oy公司一概不对使用本手册与其所述产品所产生的或与其相关的直接或间接、意外或特殊的损害、损失与费用承担任何法律责任。
本CE标记表明本产品符合Directive 93/42/EEC的要求。
您可以在www.polar.fi/support上获得相关的一致性声明。
条例资料在www.polar.fi/support中可找到。
这个在带轮垃圾桶上的打叉标志代表Polar产品是电子设备并且符合欧盟议会Directive 2002/96/EC 规定以及代表议会关于《关于报废电子电器设备指令》(简称WEEE指令)的规定。
其电池及蓄电池是符合欧盟议会Directive 2006/66/EC 规定及其议会于2006年9月6日有关电池及蓄电池及废弃电池与充电池。
于欧盟国家内,这些产品及在Polar 产品内的电池/蓄电池需被分开弃置。
Polar Electro Oy是经IS0 9001:2008认证的公司。
所有版权已被保留。
未经Polar Electro Oy同意,此用户手册不能在其他情况或方法下重新制造及使用。
在此用户手册或此产品包装内印有™符号名称及标记都均为Polar Electro Oy的商标。
而在此用户手册或此产品包装内印有®符号名称及标记都则为Polar Electro Oy的注册商标。