NURBS曲面五轴加工刀具路径规划技术研究
收割机搅龙五轴数控加工刀具路径规划——基于UG仿真和曲线插补
收割机搅龙五轴数控加工刀具路径规划——基于UG仿真和曲线插补李建生【摘要】搅龙是收割机较为复杂的零部件,其加工质量影响到收割机进给系统的作业效率和作业质量.为了提高搅龙叶片的加工质量,降低加工误差,提出了一种基于UG仿真和曲线插补算法的五轴数控加工刀具优化算法.在UG仿真软件中建立了工件和刀具的基本模型,根据模型的特点选择了合适的加工环境和加工参数,采用NURBS插补算法,最后自动生成了刀具路径轨迹,并根据刀具路径轨迹进行了走刀仿真模拟,进一步对刀具路径进了优化.仿真实验结果表明:采用UG软件对五轴数控加工刀具路径进行优化后,其加工误差要明显的低于优化前的加工误差,从而验证了刀具路径优化算法的可靠性.【期刊名称】《农机化研究》【年(卷),期】2018(040)007【总页数】5页(P211-215)【关键词】NURBS插补算法;收割机搅龙;曲线插补;五轴机床;UG仿真【作者】李建生【作者单位】洛阳职业技术学院,河南洛阳 471000【正文语种】中文【中图分类】S220.3;TP391.410 引言随着数控加工技术的迅速发展,为了提高数控加工的效率与产品质量,NURBS曲线插补技术在CAM领域的应用已得到普遍重视。
许多高档CAM系统已支持NURBS插补刀轨,作为CAD/CAM 信息物化的部分CNC如FANUC、SIEMENS 和三菱等的部分数控系统已支持NURBS插补。
五轴数控加工机床的插补算法分为两种:一种是脉冲增量式;一种是数据采样插补。
前者操作简单,一般使用在加工精度要求不高的加工场合;数据采样插补算法的精度高,且可采用闭环反馈调节系统,对误差进一步合理的调整。
收割机的搅龙部件属于较为复杂的零部件,其加工精度要求较高,因此可以采用插补算法对加工过程的刀具进行优化,对提高加工精度和加工效率具有重要的意义。
1 五轴数控加工技术和插补算法根据五轴数控加工原理和算法的不同,可以将数控加工的插补算法分为两类:一类是脉冲增量插补算法,另一类是数据采样插补算法。
五轴联动双NURBS插补技术研究

五轴联动双NURBS插补技术研究随着数控技术的高速发展,五轴数控机床以其适用性好、加工精度高、加工效率高等优点,在复杂造型零件的加工中发挥着越来越重要的作用。
NURBS曲线作为复杂造型零件数字化制造中的关键技术,其插补精度直接影响零件的加工精度。
针对传统插补方法存在复杂曲线拐点处拟合效果不好、传统机床速度规划算法加速度反复突变,导致加工误差大、加工效率低的问题,本文利用五轴数控机床开展了双NURBS插补技术研究。
主要工作内容和研究成果如下:(1)研究了基于角度平滑的双NURBS拟合算法。
针对当前加工路径不满足二阶连续性的问题,提出基于角度平滑的双NURBS 拟合算法。
首先,通过求解加工路径曲率半径,得到加工轨迹上的速度敏感点;其次,对刀具路径速度敏感点处数据进行计算,得到速度敏感点处路径曲线参数与弧长信息的对应关系;然后,通过同步双NURBS模型,获取刀具位置数据;最后,开展与泰勒二阶插补算法的对比实验,结果表明,本文方法能够得到一条拟合精度较高且满足G~2连续的刀具运动轨迹信息。
(2)研究了基于数控机床伺服性能的S形速度规划算法。
针对传统速度规划方法未考虑机床结构,造成机床各轴进给速度、加速度超过伺服能力范围,增大加工误差的问题,提出一种基于数控机床伺服性能的S形速度规划算法。
首先,通过角度平滑的双NURBS拟合算法得到平滑后的加工路径;其次,根据机床结构和加工路径,计算得到机床各轴瞬时速度和加速度范围;然后,通过7段S形速度规划算法,得到加工路径弧长信息和速度、加速度的对应关系;最后,开展与泰勒二阶插补算法的对比实验,结果表明,在计算量增加不大的情况下,本文算法速度、加速度符合机床伺服性能,有效避免机床因频繁启停,产生速度、加速度波动的问题,实现机床速度、加速度的平滑过渡。
(3)设计五轴数控机床加工系统软硬件。
系统的硬件模块主要包括:主处理器开发板、协处理器开发板和AC双转台数控机床;软件模块包括:参数设置模块、数据输入模块、插补模块、结果显示模块和驱动模块。
基于STEP—NC的NURBS曲面刀具轨迹规划
To o l Pa t h Pl a nn i n g o f NURBS S ur f ac e Ba s e d o n STEP—NC
L l ANG We n —c h a o.ZHANG Pi n g, HE Mi n g
( F a c u l t y o f E l e c t r o m e c h a n i c a l E n g i n e e r i n g , G u a n g d o n g U n i v e r s i t y f o T e c h n o l o g y , G u a n g z h o u G u a n g d o n g 5 1 0 0 0 6, C h i n a )
制造业信息化
2 0 1 3 年 第3 期( 第2 6 卷, 总 第1 2 5 期)・ 机 械 研 究 与应 用 ・
基于 S T E P — N C的 N U R B S曲面 刀 具 轨 迹 规 划
梁文潮 , 张 平, 贺 明
( 广 东工业大学 机 电_ T - 程 学院, 广州 广 东 5 1 0 0 0 6 )
摘
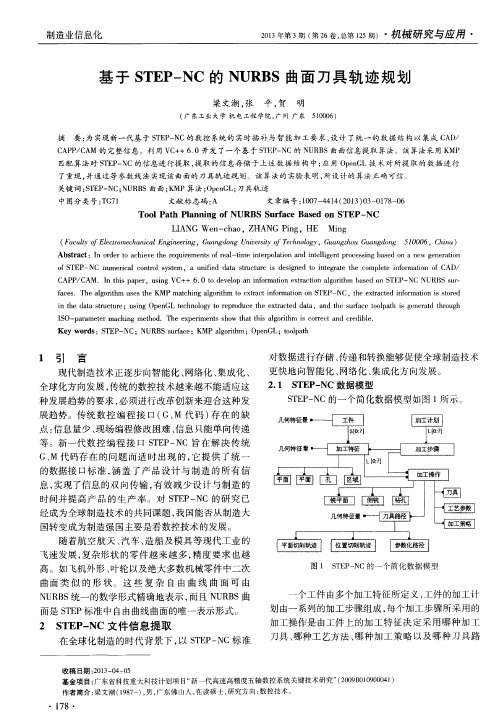
要: 为 实现 新 一 代 基 于 S T E P — N C的 数 控 系统 的 实时 插 补 与 智 能 加 工要 求 , 设 计 了统 一 的数 据 结 构 以 集 成 C A D /
C A P P / C A M 的 完 整 信 息 。利 用 V C + +6 . 0开 发 了一 个 基 于 S T E P — N C的 N U R B S曲 面 信 息提 取 算 法 。该 算 法 采 用 K M P 匹配 算 法 对 S T E P — N C 的信 息 进 行提 取 , 提取的信息存储于上述数 据结构 中; 应用 O p e n G I 技 术 对 所提 取 的 数 据 进 行 了重 现 , 并通 过 等 参 数 线 法 实现 该 曲 面 的 刀具 轨 迹 规 划 。该 算 法 的 实验 表 明 , 所设 计 的 算 法 正确 可信 。
五轴联动NURBS曲线插补算法及加减速控制研究
五轴联动NURBS曲线插补算法及加减速控制研究作为高端数控机床的典型代表,五轴机床集中体现了一个国家制造业的发展水平。
在高速高精密插补领域应用广泛的NURBS曲线插补算法已成为提高五轴数控机床性能和市场竞争力的关键。
本文针对五轴联动下刀尖点轨迹规划中的NURBS曲线的插补和加减速算法开展研究,基于Gear预估校正法对插补参数进行预估和迭代校正补偿,设计了一种新的NURBS曲线插补算法,在PC环境下的仿真表明算法计算速度快、计算精度高、速度波动小。
基于S形和三角函数加减速控制法实现速度连续、平滑过渡,仿真表明该前瞻加减速控制算法计算简便、满足柔性要求且符合机床自身性能。
对五轴数控机床进行运动学分析,得到了工件坐标系下刀尖点坐标和刀轴矢量与机床各轴运动量的转化关系。
在以NUC950为核心的嵌入式数控硬件平台上搭建了基于Linux 的软件系统:移植Bootloader、Linux内核和根文件系统,开发了LCD、矩阵键盘等设备驱动程序,进行了译码模块和用户图形显示界面等软件开发。
设计了一种五轴NURBS插补指令格式,给出了五轴刀具轨迹规划中刀轴矢量控制策略。
最后,通过插补算法在嵌入式数控系统中的完整正确运行和加工实例验证了插补算法的有效性和正确性。
NURBS曲线刀具路径实时插补技术研究

NURBS曲线刀具路径实时插补技术研究NURBS方法以其优良的性质在CAD/CAM中得到了广泛应用,并在STEP标准中被指定为描述工业产品几何形状的唯一数学工具。
在数控加工领域中,研究NURBS曲线刀具路径实时插补技术,不仅能够为现有数控系统提供扩展功能,而且还可为下一代数控系统STEP-NC的开发提供核心技术支持。
以此为背景,本文开展了数控系统NURBS刀具路径实时插补技术研究,主要完成了以下几个方面的工作:(1)研究了NURBS曲线快速求值求导计算方法。
NURBS曲线插补通常需要同时计算曲线值和多阶导数值,此时传统de Boor 算法综合效率较低,不利于实时计算。
本文通过定义向量扩展运算方法,给出了B 样条基函数快速求值算法,并实现了NURBS曲线快速求值求导计算。
实例计算表明,该算法可提高NURBS曲线实时插补任务的计算效率,增强插补器实时性,提高曲线插补精度。
(2)研究了NURBS曲线插补进给速度精确控制方法。
从进给速度波动产生原理分析入手,指出NURBS曲线实时插补时下一插补点的计算应以逼近插补段弦长为条件,而非弧长。
以此为基础,提出了NURBS曲线插补进给速度精确控制方法。
该方法采用主动控制方式,在计算量不增加或增加不大的情况下,可显著减小实时插补进给速度的波动率。
(3)研究了NURBS曲线实时插补进给速度极限分析方法。
NURBS曲线实时插补进给速度极值受到了机床进给系统动力学特征和曲线几何特征的限制。
通过建立直角坐标系数控机床进给系统的机电混合模型,给出了机床进给系统动力学约束条件下的速度极值解析曲线,即VLC曲线。
同时还指出,当VLC曲线的最大弦高误差估计值满足NURBS曲线插补精度要求时,可不必再考虑插补弦高误差约束条件。
这一结论有助于简化进给速度规划约束条件,并可为NURBS曲线实时插补进给速度规划方法研究提供理论分析依据。
(4)研究了直角坐标系下时间最短的NURBS曲线插补进给速度优化规划方法。
五轴联动双nurbs曲线插补
五轴联动双NURBS插补(一)摘要目前,复杂曲面零部件的生产和制造在航空航天、汽车、论攒、刀具和模具等行业具有特别重要的现实意义。
首先,这类零件的告诉高精加工一般在五轴联动数控机床上完成。
其次,在CAD/CAM软件中,零件自由曲面的设计常采用非均匀有利B样条(NURBS)表示。
NURBS技术在CAD/CAM领域已经取得了比较成功的应用,而在CNC领域的应用却相对滞后,目前只有FANUC、SIEMENS、三菱等少数高档数控系统支持NURBS样条曲线插补。
NURBS插补相对于常见的线性插补具有很多优点,因此,研究CNC系统中的NURBS插补方法意义深远。
目前有关NURBS样条曲线插补方法的研究大多局限于三坐标联动,在有关五轴联动NURBS插补技术方面未见有公开发表。
国外CNC系统商都声称自己已经具有五轴联动NURBS插补功能,但对于这些功能却纷纷对华采取禁运,因此,国内进口的五轴联动数控系统大多只有线性插补等简单功能。
为使开发的五轴联动数控系统能支持NURBS样条插补,本文提出了一种适合于五轴联动加工的双NURBS 曲线插补格式,然后将对具有该格式数控代码的生成以及插补过程进行介绍。
(二)正文随着曲面加工的高速和高精度要求的提高,五轴数控机床成为了复杂曲面加工的最佳手段。
为什么使用五轴机床呢?因为传统的三轴机床能够加工到的地方有限,一些复杂的曲面没法加工。
可以想象,一个点,如果可以在x、y、z三个维度运动理论上可以到达任何地方,但刀具近似于一个圆柱体,自由度有六个,三个方向的平动和三个角度的转动,所以为了使刀具能够达到尽可能多的加工位置就需要增加原有的三轴机床的自由度。
那为什么不适用六轴机床呢?因为数控加工最重视的是精度和效率,自由度越高机床势必越复杂,刚度也就越差,相应的导致加工的稳定性、精度和效率的下降。
而五根轴已经可以实现六个自由度的运动了,因此现在一般采用的是五轴联动。
相应带来的问题是五轴机床毕竟是用五个参数表示六个自由度,所以在函数的表达上面需要经过转换,给数学插补带来了麻烦。
五轴数控加工中的刀具轨迹优化方法研究

五轴数控加工中的刀具轨迹优化方法研究五轴数控加工是一种高精度、高效率的加工方法,广泛应用于航空航天、汽车制造、电子设备等领域。
在五轴数控加工过程中,刀具的轨迹优化是提高加工质量和效率的关键。
本文将就五轴数控加工中的刀具轨迹优化方法进行研究,并探讨其在实际应用中的效果和影响因素。
刀具轨迹优化是为了减少加工过程中的切削力、切削温度和切削振动,同时提高加工质量和加工效率,降低加工成本。
在五轴数控加工中,刀具需要按照预定的路径精确地移动,实现对工件的精确加工。
刀具轨迹优化方法的研究就是为了找到一种最佳的刀具移动路径,以减少切削力和切削温度,提高加工精度和表面质量。
目前,有许多刀具轨迹优化方法被广泛研究和应用。
其中,基于几何建模的刀具轨迹优化方法是一种常用的方法。
该方法通过对工件几何特征进行建模,确定刀具移动路径,以达到提高加工效果的目的。
然而,该方法存在一些问题,如计算复杂度高、对工件形状要求较高等。
因此,有学者提出了基于优化算法的刀具轨迹优化方法,如遗传算法、粒子群算法等。
这些方法通过优化算法来寻找最优路径,以实现在不同目标下的刀具轨迹优化。
此外,还有一些刀具轨迹优化方法是针对特定工件形状和切削条件而设计的。
例如,根据工件的曲面形状和切削条件,可以采用仿真模拟方法对刀具轨迹进行优化。
这种方法可以通过仿真预测出切削力和切削振动的情况,进而确定最佳的刀具轨迹。
另外,还可以利用神经网络等人工智能方法对刀具轨迹进行优化。
刀具轨迹优化方法的选择与具体加工任务和加工要求密切相关。
在实际应用中,需要考虑工件形状、材料、切削条件、加工精度要求等多个因素。
例如,在加工曲面工件时,由于曲面的复杂性和非直线性,需要采用基于数学模型的方法对刀具轨迹进行优化。
而在加工直线形状的工件时,可以采用基于优化算法的方法进行刀具轨迹优化。
此外,还可以结合多种方法,综合考虑不同因素来进行刀具轨迹优化的研究。
刀具轨迹优化方法的研究在提高五轴数控加工效率和质量方面具有重要意义。
基于对偶四元数的五轴等距双NURBS刀具路径规划
基于对偶四元数的五轴等距双NURBS刀具路径规划
张立强;张守军;王宇晗
【期刊名称】《计算机集成制造系统》
【年(卷),期】2014(20)1
【摘要】针对由离散刀位构成的一阶线性不连续刀路影响机床运动平稳性的问题,提出在工件坐标系下对线性刀路进行光顺,获取满足精度且达到G1以上连续的等距双非均匀有理B样条刀具路径.采用对偶四元数描述五轴刀位,利用对偶四元数B 样条矢量函数拟合线性刀路,获取五轴联动的刀具B样条运动轨迹,插值得到描述刀具中心点和刀轴点运动轨迹的等距双非均匀有理B样条曲线刀具路径.算例表明,采用本算法对工件坐标系中的线性刀路进行光顺,在提高刀具轨迹运动平稳性的同时,可以获得满意的加工精度,适用于五轴高速精密加工.
【总页数】6页(P128-133)
【作者】张立强;张守军;王宇晗
【作者单位】上海工程技术大学机械工程学院,上海201620;上海工程技术大学机械工程学院,上海201620;上海交通大学机械与动力工程学院,上海200240
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于单位球面生成的等距双NURBS刀具路径规划 [J], 张守军;张立强;张君
2.NURBS曲面五轴加工刀具路径规划技术研究 [J], 李丽;房立金;王国勋
3.面向五轴联动高速加工的等距双NURBS刀具路径光顺方法 [J], 杨堂勇;冯景春
4.面向五轴加工的等距双NURBS刀具路径同步插补方法 [J], 张君;张立强;张守军;张凯
5.五轴变权重等距双NURBS刀具路径平滑算法 [J], 李乾坤;赵现朝;高鹏;石继超;霍晓锐
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a n d wo r k i n g a c c u r a c y . Ke y Wo r d s :NURBS To o l P a t h P l a n n i n g 5 - Ax i s P r o c e s s i n g I s o p h o t e
沈 阳 1 1 0 8 1 9
沈 阳 1 1 0 1 5 9
摘
要: 提 出 了基 于等 照 度 线 的 刀具 路 径 规 划 方 法 , 采 用等 照度 线 对 曲 面 进 行 分 区 , 根 据 曲 面 特 征 采 用 不 同 的刀 具 路
径规划方法 , 兼顾 效 率 的 同 时尽 可 能提 高加 工精 度 。通 过 加 工 实验 与 传 统 刀 具路 径规 划 方 法进 行 对 比 , 表 明 本 方 法在 加 工
效 率 和 加 工 精 度 方 面 都 优 于传 统 方 法 。
关键词 : N U R B S 刀 具 路径 规 划 五 轴 加 工
等照 度 线
中图分类号 : T H1 6 2 ; T P 2 7 3
文献标识ቤተ መጻሕፍቲ ባይዱ : A
文章编号 : 1 0 0 0 — 4 9 9 8 ( 2 0 1 4 ) 0 2 — 0 0 0 5 — 0 5
Ab s t r a c t :T o o l p a t h p l a n n i n g me t h o d i s p r o p o s e d b a s e d o n i s o p h o t e .I t i n t r o d u c e s t h e i s o p h o t e t o p a r t i t i o n t h e c u r v e d
随着 机 械制 造技 术 的发 展 , 产 品结 构 、 形 状 趋 于 复 杂化 、 精 密化 , 而 传 统 的 三 轴 加 工 不 能 满 足 要 求 。目 前 , 五 轴 加 工 技 术 是 加 工 连 续 、 平 滑 、复 杂 曲 面 的 唯 一 手
∑∑ ( ¨ ) , ( ) 。
s u r f a c e a n d a d o p t s d i f f e r e n t t o o l p a t h p l a n n i n g me t h o d a g a i n s t t h e s u r f a c e c h a r a c t e i r s t i c s . I 1 1 e p l a n n i n g me t h o d s h o u l d t a k e i n t o
N U RBS 曲 面 互 轴 加 工 刃 具 路 弪 规 划 菽 术 研 究 水
口 李 丽 , z 口 房立金 口 王国勋
1 . 沈阳城市建设学院 交通与机械工程系 2 . 东 北 大 学 机 械 工 程 与 自动 化 学 院 3 . 沈 阳理 工 大 学 机 械 工 程 学 院 沈阳 1 1 0 1 6 7
式 中: , ( i = 0, 1 …. , 凡d= o, 1 …. , m) 为控制顶 点 ; ∞ 为
控 制顶 点 对 应 的 权 因子 ; , ( “ ) 和 . ( ) 分 别 为 沿 向 的第 i 个 P 次 和 沿 向 的 个 q 次 B 样 条 基 函 数 , 它 们 分 别 由 向 节 点 矢 量 U 和 V 向 节 点 矢 量 按 } , ={ / 3 0 ,
c o n v e n t i o n a l t o o l p a t h p l a n n i n g me t h o d i t s h o w s t h a t t h e me t h o d i s s u p e i r o r t o t r a d i t i o n a l me t h o d s i n t e r ms o f w o r k i n g e ic f i e n c y
d e Bo o r — C o x递 推 公 式 决 定 , ={ o , U . . ,
S ’ ( , V ) = 上 三 ( M) , g ( )
i =0j= =0
段。 与三轴 数 控机 床 相 比 , 五 轴 数 控 机 床 增 加 了 两 个 旋 转轴 , 使 刀具 可处 于 工作 空 间 中的任 意方 向 , 从 而 使 五
轴 联 动 机 床 比三 轴 联 动 机 床 具 有 更 强 的 加 工 能 力 。 刀 具 路 径 规 划 是 复 杂 曲 面 五 轴 数 控 加 工 的关 键 环 节之 一 .规 划 算 法 的 优 劣 直 接 决 定 了 轨 迹 的 质 量 与 生 成效 率 , 进 而 对 加 工 质 量 及 生 产 效 率 产 生 重 要 影 响 …。 目前 的 规 划 方 法 主 要 有 等 参 数 线 法 、 等截 面 法 、 等 残 留 高度 法等 , 每 种 方 法 都 有 各 自优 缺 点 , 都 有 一 定 的 适 用