基于AT89C51的智能清洁机器人设计
基于STC89C51的智能打扫机器人
基于STC89C51的智能打扫机器人作者:曹洋崔玉玲郭凯刘凯书刘焱来源:《农家科技中旬刊》2018年第07期摘要:此设计运用STC89C52单片机为核心技术,打造出一款智能多功能清洁机器人。
现在,在市场上智能机器人的价格十分昂贵,因此,我们设计了这种价格低廉且很实用的智能机器人。
它主要包含GSM远程控制装置,自动清扫装置,语言显示装置,实时监测装置和其他辅助装置,多种多样的功能给我们的生活带来了更多便捷的服务。
关键词:远程控制,自动打扫,实时监测,语言显示装置0引言随着社会进步,科技发展,人们开始追求一种方便,便捷的生活方式,平时人们的工作十分繁忙,因此,没有过多的时间起打扫家庭,这时,智能打扫机器人就成为了最好了先择,它是一款拥有多种功能的结合。
突出了一切为用户服务的宗旨,使用户更加喜欢这款打扫机器人。
1.1结构设计作品的整体是有车体,打扫装置,控制装置,传感响应,4大块组成。
传感部分包括车身两侧的红外测距感应器。
车身前方是万向轮,后轮采用直流电机驱动,由测距传感信号输入,经过STC89C51单片机控制直流电机工作。
结构采用圆形底盘,控制简单,防止卡死。
1.2 移动设计由设计需求分析,不仅要考虑高度,外形,底盘面积,还需要考虑电源和连接方式。
功能模块与移动平台通过通电口连接,这时移动板控制直流电的导通和断开,从而实现移动功能。
1.3功能设计家庭打扫机器人功能有扫地功能,远程功能,实施监控,辅助功能。
通过不同的功能模块来实现它的不同功能。
打扫也是它的主要功能,因此需要考虑材料必须耐磨,同时防止产生静电,扫地刷由左右两部分组成,这样便于回收垃圾。
2 运动分析2.1 最大运动速度极限速度的大小表示机器人在接收信号时,返回的速度。
P=F·V机器人在均匀运动时两轮转动,由摩擦产生动力。
F=F/22.2 驱动力打扫机器人对外界所施加的最大动力,也是外界反馈的最大支持力。
M=F·r3 主要优点①外观新颖独特,材料环保。
基于stc89c51单片机的扫地机器人设计

基于stc89c51单片机的扫地机器人设计作者:陈学谊来源:《科学与信息化》2020年第30期摘要扫地机器人作为一种可代替人类进行房间清扫的家用机器人之一,由于其方便性,因此在目前社会中具有良好的发展前景与运用前景。
本文主要阐述如何设计与制作一个具有自动清扫,自动避障,定时清扫的功能简易扫地机器人。
此扫地机器人由总控制电路,电源电路,定时器电路,及电机驱动电路构成。
本扫地机器人的核心为stc89c52单片机,此单片机运用简单,效率高且成本低,可以良好的实现扫地机器人所需求的基本功能。
本扫地机器人还具有定时功能,可以在一定时间后自动关闭,因此可以到达节约用电的目的。
关键词扫地机器人;自动避障;定时电路;stc89c52单片机概述随着第一台扫地机器人在1997年由瑞典伊莱克斯生产开始,扫地机器人至今已经拥有了二十余年的发展历史。
随着近代科学技术的不断发展与革新,扫地机器人也由最开始的只可以进行简单的清扫功能的傻瓜模式,慢慢发展成了具有许多不同功能,如自动避障功能,路径规划功能,定时清扫功能,语音控制功能等不同功能的智能扫地机器人。
而人们对于扫地机器人的需求程度也越来越高,因此,扫地机器人在我国具有良好的前进。
本文主要从电路设计方面着手,简单讲述如何设计一个由总控制电路,电源电路,电机驱动电路和定时器电路这四大电路构成的简易扫地机器人。
且为了节约制作成本,提高制作效率,我们可以先利用电脑对我们设计的扫地机器人电路进行仿真测试。
其主要设计过程为:理论设计——仿真实验测试——仿真结果分析——电路制作——实物测试——结果分析。
1 总控制电路stc89c52作为应用最为广泛的单片机之一,价格便宜,工作效率高且用于简单,是作为扫地机器人的总控制芯片的最好选择之一。
此单片机拥有四组八位可编程的I/O口,分别为P0口:由P0.0至P0.7的8位双向I/O口线(Pin39-Pin32)。
P1口:由P1.0至P1.7的8位双向I/O口线(Pin1-Pin8)。
基于AT89C51控制的排水管道清淤机器人的设计

第12期20l O 年12月’机械设计与制造M achi ner yD esi gn&M anuf act ur e165文章编号:100l 一3997(2010)12-0165_03基于A T89C 5l 控制的排水管道清淤机器人的设计嵇鹏程沈惠平(江苏工业学院机械与能源工程学院,常州213016)T he deSi gn O f C Ieani ng r O bO t f O r dr ai n pi peS bas edO nA T 89C 51JIPen 舭heng ,SH E N H ui -p i ng(C oU ege of M echani cal and E ner gy Engi neer i ng ,Ji angsu Po l ”echni c U ni V e r si t y ,C hangzhou 213016,C hi na)i 【摘要】研究了一种新型适应管径的排水管道清淤机器人,基于A T 89c51单片机,通过压力传i l 感器M cL -L 测量轮子对管壁的压力值与设定值进行比较,实现机器人的鲁棒性和适应性;通过光电传i i 感器G K 一430A 检测机器人是否到达检查井口,实现机器人的自主性和智能性;用超声波传感器实现i i 绞刀机构的径向移动,以满足不同管径清淤的需要。
方案论证表明:该系统适应性强、工作效率高、去淤;l 彻底。
li 关键词:清淤机器人;行走机构;绞刀机构;步进电机;控制系统il【A bst r act 】A 聊埘r 060t 埘溉p 咖e_di 册ef er 以印t n6i 以炒加r depos 如cze 帆£凡g 讥d 顾,嘲8p 咖ezi 胎泌ll 盯砌如正‰AT89C51厶舭co 陀com roffer .死e 删№胱∞Ⅱred 舭JP 嗍s 啪矿舭埘k 如肌舭埘趔l i 琥r o “砂t 船pr ess u 阳se 瑚D rM c L —L 蠡cD 啤,nr e d 埘讹t ks e £秽碰l 正e ,埘九记111.∞^如秽esr06琳f 聊ss 删础叩£一《l 曲i 嘶矿砒r060f .舭p 舶f oe 如cf 廊se 瑚D r G K -430A 蠡獬ed 幻如抛ct 叫k 舭r 池r 06优r enc^es f 胁l口Oi ckc 座i ng 训ezzkod ,伽^如^∞^沈t ,es 础幻,m ,ny 珊以锄ezf 诤,l ce 矿f 舷r 060丘77le 以t r 璐。
基于stc89c51单片机的扫地机器人设计
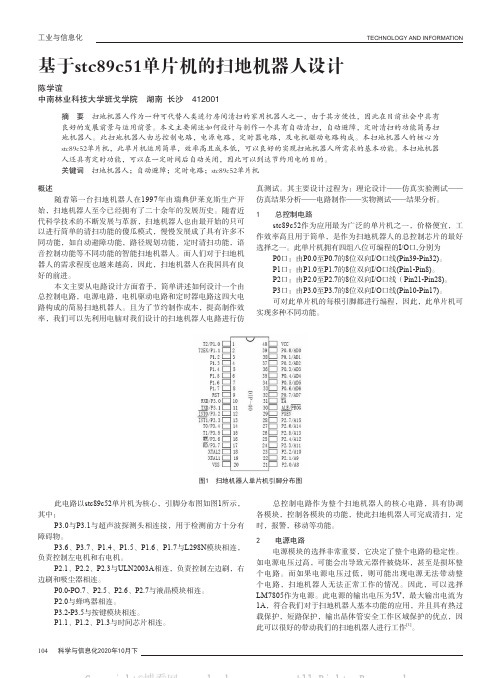
图1 扫地机器人单片机引脚分布图
单片机为核心,引脚分布图如图1所示,与超声波探测头相连接,用于检测前方十分有
L298N模块相连,
相连,负责控制左边刷,右
总控制电路作为整个扫地机器人的核心电路,具有协调各模块,控制各模块的功能,使此扫地机器人可完成清扫,定时,报警,移动等功能。
2 电源电路
电源模块的选择非常重要,它决定了整个电路的稳定性。
如电源电压过高,可能会出导致元器件被烧坏,甚至是损坏整个电路。
而如果电源电压过低,则可能出现电源无法带动整。
基于AT89C51单片机智能控制洗衣机的设计毕业设计

摘要洗衣机是现代人必备的日常生活家电,它的发明和应用使人们的洗衣工作变得省时省力,很好地缓解了人们在家务劳动方面的压力。
一般的数字逻辑电路控制的洗衣机只有两三个程序,也有一按通的傻瓜程序。
而基于单片机控制的洗衣机可以复杂程序控制,将水位段细化,漂洗功能细化,加上适用不同衣物等功能,洗涤程序大大增加。
本设计采用AT89C51单片机作为洗衣机控制系统的主控芯片,洗衣机的各种洗衣程序运行都在单片机的控制下,使得洗涤、漂洗、脱水等各种功能的操作都不需手动。
系统的硬件设计包括电源模块、谐振式水位监测模块、洗衣机LED显示、输出控制电路、软件设计包括主程序、内部定时中断服务程序、外部中断服务程序。
关键词:全自动洗衣机;单片机;LED显示AbstractThe washing machine is the appliance in people’s daily life,its invention to the job gets time-saving,and relieves the pressure in the domestic labour.The digital logic to control circuit of the washing machine has only two or three programs,also has a fool according to the program.But the revivification of washing machine can control a large complex program,and can turn the water level and rinsing functions into tiny,because of its different functions in clothing,washing procedure increases significantly.This design uses AT89C51 as the main control chip,all the programs of the washing machine are under the control of the CPU so that washing,rinsing and deh ydration functions don’t need to be operated by manual.The hardware design of the system includes power module,water monitoring module,LED display and output controller,the software part is composed of the main procedure,timing services application and external services.Key words:Washing Machine;Single Chip Microcomputer;LED display毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
单片机课程设计_基于89C51的全自动洗衣机控制器设计

单片机系统课程设计成绩评定表设计课题基于89C51的全自动洗衣机控制器设计学院名称:电气工程学院专业班级:学生姓名:学号:指导教师:设计地点:设计时间:单片机系统课程设计课程设计名称:基于89C51的全自动洗衣机控制器设计专业班级:学生姓名:学号:指导教师:课程设计地点:课程设计时间:单片机系统课程设计任务书目录1概述 (4)2 总体方案设计 (5)2.1全自动洗衣机的工作流程 (5)2.2硬件组成 (6)3 硬件电路设计 (6)3.1 89C51 (6)3.2 晶振电路 (6)3.3 复位电路 (7)3.4 启动电路 (7)3.5注水电路,放水电路 (7)3.6洗涤电机控制电路 (8)3.7警报电路 (11)4 软件设计 (12)4.1 主程序流程图 (12)4.2 中断服务程序流程图 (14)4.3子函数流程图 (15)5 总结 (15)6 参考文献 (16)附录A (17)附录B (18)1概述当今社会,洗衣机已经渗透到各个家庭了,人们对于这种东西已经不会再陌生,也越来越离不开洗衣机。
洗衣机的便利让人们节省了许许多多的时间,而且洗涤之后的效果也比人手洗的更加干净。
而自从推出了全自动洗衣机之后,洗衣机变得更加可靠。
全自动洗衣机就是将洗衣的全过程(泡浸-洗涤-漂洗-脱水)预先设定好N 个程序,洗衣时选择其中一个程序,打开水龙头和启动洗衣机开关后洗衣的全过程就会自动完成,无需人操作,只需要按下开始按钮便可。
其工作原理可以简述为:洗衣机的洗涤过程主要是在机械产生的排渗、冲刷等机械作用和洗涤剂的润湿、分散作用下,将污垢拉入水中来实现洗净的目的。
首先充满于波轮叶片间的洗涤液,在离心力的作用下被高速甩向桶壁,并沿桶壁上升。
在波轮中心处,因甩出液体而形成低压区,又使得洗涤液流回波轮附近。
这样,在波轮附近形成了以波轮轴线为中心的涡流。
衣物在涡流的作用下,作螺旋式回转,吸入中心后又被甩向桶壁,与桶壁发生摩擦。
2智障扫地机器人
2. 2 AT89C51功能特性概述
AT89C51提供以下标准功能:4K字节Flash闪速存 储器,128字节内部RAM,32个I/O 口线,两个 16位定时/计数器,一个5向量两级中断结构,一 个全双工串行通信口,片内振荡器及时钟电路。同 时,AT89C51可将至0Hz的静态逻辑操作,并支 持两种软件可选的节电工作模式。空闲方式停止 CPU的工作,但允许RAM,定时/计数器,串行通 信口及中断系统继续工作。掉电方式保存RAM中的 内容,但振荡器停止工作并禁止其他所有部件工作 直到下一个硬件复位。
扫地机的智能控制系统设计
2020-05-04
1.1应用技术
1. 1 路径规划技术 1. 2 多传感器融合技术 1.3 电源技术
1.2实现功能
1.自动检测垃圾并对较脏的区域重点清扫 2.自动寻找智能充电座回去充电 3.定时清扫 4.当机器被卡住能自动摆脱 5.支持遥控,手机APP连接 6.边角清扫程序 7.不重复清洁、不留死角和楼梯防跌落功能
设置串口方式1,T1 方式1,T0方式2
外部中断0和T0开中断, T0设计为中断优先级
设置显示,定时,启 动停止标志
显示
N
否
Y
2位LED显示时间
N
图4.3红外线发射流 程图
有键 按下 否
Y 1分钟 到否
N Y
恢复R5 进入低耗功能
4.5 驱动系统流程
首先是系统初始化工作,即设置寄存器、配置GPIO、 定时器、A/D转换器和外部中断、启动A/D转换。 然后检测GPIO有没有启动信号,检测到启动信号后, 从另一个GPIO发出控制信号给直流电机加电。从 A/D转换器里读取电流信号数据,再通过求平均值得 到电机的电流值;对输出脉冲信号的数据进行FFT变 换,求出基波的频率,再根据电机的具体型号乘以一 个系数得到电机的转速。最后把测试电流和转速送 给液晶显示系统显示清扫机行进速度,启动总线传输, 把测试结果传输到单片机,以对数据进行保存和分析。 软件流程如图4.4所示。
基于单片机的智能清洁机器人的设计
2020.23科学技术创新基于单片机的智能清洁机器人的设计杜春明于桂君刘佳宁张思宇(辽宁科技学院电信学院,辽宁本溪117004)1概述伴随社会的逐渐发展,人们越来越追求更加舒适的居家生活,但繁重的日常清洁,又成为了人们非常困扰的问题。
智能清洁机器人的出现无疑可以有效解决这个难题,逐渐地替代常规手动清扫工具[1]。
智能清洁机器人是一个具有自动控制的家用清扫工具,较适合于家庭居住面积比较大的居家环境,可以有效的减少人们劳动清扫时间,提高清扫效率。
本文将介绍一款基于AT89C52单片机的清洁机器人的软硬件设计。
2系统总体设计本设计是基于AT89C52单片机芯片作为核心,采用四节1.5V的电池为系统供电。
采用红外遥控装置,通过按键控制智能清洁机器人的各种转向。
采用红外线传感器装于车的左右两端实现避障功能;采用红外对管,装于车底盘的两侧,实现黑线循迹功能。
利用双直流减速电机进行驱动,并配有单个万向轮安装于后方中下端,方便进行任何方向的驱动。
采用L298N电机驱动芯片驱动直流电机,并运用PWM脉冲宽度调制技术对电机的转速进行控制。
采用LED数码管进行模式显示。
清洁模块主要采用单个吸尘器电机进行路面清洁,通过吸尘器电机的风机叶轮旋转吸起尘土,经过吸口吸入带有过滤网的集尘盒内。
系统总体框图如图1所示。
图1系统总体框图3系统硬件设计3.1单片机最小应用系统AT89C52单片机的最小系统,主要由时钟电路和复位电路组成。
电容C11和电阻R1构成上电复位电路,电容C11可滤除高频干扰,防止单片机误复位;添加按键构成手动复位电路。
单片机复位需在RST引脚输入至少持续两个机器周期(24个振荡周期)以上的高电平[2]。
EA引脚接高电平。
如图2所示。
3.2电源电路采用四节1.5V的电池作为整个系统的供电电源。
因为各类传感器模块、AT89C52单片机芯片和一位共阳极LED数码管的工作电压为5V,L298N电机驱动芯片的电机驱动控制的电源输入端VS和吸尘器电机的工作电压为12V,所以输入电压VCC (6V)须要经过三端稳压集成电路7805和7812分别降压到5V 和升压到12V才能为整个系统供电。
单片机控制的清洗机设计
摘要清洗机的出现给人们的生活带来了诸多方便,它是现代人必备的日常生活家电,它的发明和应用使人们的清洗工作变得省时又省力,很好地缓解了人们在家务劳动方面的压力。
本清洗机控制系统,采用目前常用的AT89C51单片机,用汇编语言的编程方法,完成对清洗机和清洗物全过程的自动控制,清洗完成后能自动报警。
清洗机的整体电路模块包括功能按键电路、传感器检测电路、驱动电路、指示灯、进水排水电动机控制电路、清洗电动机控制电路及电源电路。
控制程序设计包括定时中断服务程序、外中断服务程序及主程序。
全自动清洗机由于具有对清洗物的磨损小、洗涤量大、节约水电等特点,越来越得到广大家庭的青睐。
由于人们对全自动洗衣机在价格低廉的基础上也提出了功能齐全、操作简单、不缠绕、清洗效果好、性能可靠、工作效率高、便于维修等更高的要求。
为满足人们这种需求,特设计出这种有微控制器控制的全自动洗衣机控制系统。
关键词:AT89C51单片机;LED;汇编语言;中断;定时辽宁工业大学课程设计说明书(论文)目录第1章绪论 (1)第2章设计方案 (3)2.1设计任务 (3)2.2清洗机设计方案 (3)2.3设计方案结构框图 (3)第3章硬件设计 (5)3.1单片机最小系统设计 (5)3.1.1 单片机的概述 (5)3.1.2 单片机时钟电路 (6)3.1.3 单片机复位电路 (6)3.1.4 单片机最小系统组成 (7)3.2电源电路 (8)3.3显示电路 (8)3.4蜂鸣报警电路 (9)3.5驱动电路 (9)3.6电机控制电路 (10)3.7液位传感器电路 (10)3.8按键电路 (11)第4章软件设计 (12)4.1主程序流程图 (12)4.2K2/K3按键流程图 (13)第5章系统测试及分析 (14)5.1 仿真调试 (14)5.2 调试故障及原因分析 (14)第6章课程设计总结 (15)参考文献 (16)第1章绪论清洗是一种与人们生活实践关系十分密切的劳动,人类从远古时期就开始从事这种劳动。
基于AT89C51单片机的超声波清洗仪的研制
基于AT89C51单片机的超声波清洗仪的研制胡宇军;丁金华;荣强强【摘要】超声波清洗设备在工作中出现的发生器输出频率漂移和换能器谐振频率变化会严重影响其清洗效率,为此研制了一种基于AT89C51单片机控制的具有频率自动跟踪功能的超声波清洗仪.依据超声波清洗原理,给出了系统的硬件和软件设计,详细阐述了超声波发生器逆变电路与驱动电路、数字频率合成与自动跟踪电路等方面设计,保证了换能器负载的输出功率维持在高工作效率点上.试验证明:超声波清洗速度快、效率高,容易实现自动化控制,能保持稳定的输出功率.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)004【总页数】4页(P16-18,37)【关键词】超声波清洗仪;频率自动跟踪;驱动电路;AT89 C51单片机【作者】胡宇军;丁金华;荣强强【作者单位】大连工业大学机械工程与自动化学院,辽宁大连116034;大连工业大学机械工程与自动化学院,辽宁大连116034;大连工业大学机械工程与自动化学院,辽宁大连116034【正文语种】中文【中图分类】TP2160 引言超声波因具有方向性好,穿透能力强,能使物质产生明显的声压作用等特点而广泛应用于医疗、制药、化工等行业。
超声波清洗具有清洗效率高、成本低,容易实现控制自动化等特点。
在许多对产品表面质量和生产率要求较高的场合,选用超声波清洗可以达到用其他处理方法难以达到的效果。
在某些场合中(如核工业),可以利用超声波清洗设备实现自动化清洗,避免了对工人的伤害。
超声波清洗作为一项实用性很强的技术,被广泛应用于电子、机电等行业。
超声波清洗仪在使用过程中出现的液面高度变化、电路发热等现象会造成谐振频率漂移、振幅下降甚至停止振荡,严重影响清洗仪的清洗效果。
锁相技术的提出,使频率自动跟踪成为可能,但是由于锁相频率范围小,换能器也会出现失调现象。
为此设计了一种以单片机作为主控器的具有频率自动跟踪功能的超声波清洗仪。
1 超声波清洗原理与结构设计超声波清洗主要利用超声波在液体中的空化作用去除被清洗物表面的污垢。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第24卷 第5期2008年3月甘肃科技Gansu Science and T echnolo gyVol.24 N o.5M ar. 2008基于AT 89C 51的智能清洁机器人设计韩 珩,张 波(沈阳化工学院,辽宁沈阳110142)摘 要:设计一种基于AT 89C51的智能清洁机器人系统,介绍了机器人总体设计、各组成部分及系统软件设计。
该系统包括主控模块、执行机构以及传感器模块等几个子系统,以通用性和功能完备为目标使机器人具备了智能清洁的能力。
关键词:清洁机器人;单片机;传感器;红外遥控中图分类号:T P2421 机器人的总体设计总体设计目标是设计一个具有自主清扫、避障、卡住报警、尘仓满仓检测等功能,能够在无人干预情况下自主完成室内清扫工作,也可以人为通过红外遥控器控制其状态的机器人系统。
同时,为使机器人高效、可靠地完成作业,在其内部嵌入路径覆盖算法,使它脱离随机清扫的模式,能够记忆已走过的路径和遇到的障碍物位置,不遗漏地进行全区域清扫和不重复遇到同一个障碍物,实现高覆盖率、低重复率的清扫过程。
2 机器人的组成结构机器人由5部分组成:系统主控制部分、执行电机部分、传感器部分、输入输出部分和电源部分。
主控系统使用单片机AT 89C51控制,包括红外遥控接收模块,对输入输出器件的操作,对执行电机的控制,以及对传感器的响应等。
执行电机部分是吸尘机器人的主要构成部分,包括行走驱动子系统和吸尘子系统。
行走结构采用轮式结构,圆形壳体,底盘为三轮电动小车,前面两轮由两个电机独立驱动,后轮为万向轮。
吸尘系统用电机带动清扫刷的转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造强大的吸力将灰尘吸入灰尘存储箱中。
在清扫吸尘之后,利用安装在壳体下面的清洁布擦除残留在地面上的细小灰尘。
轮子电机、吸尘电机和毛刷电机使用的都是无刷直流电机;传感器部分即检测子系统,主要为了保障机器人能够安全地工作;输入输出部分包括遥控子系统和显示子系统,能够较好地实现人机交互的功能;电源部分采用可充电的12伏锂电池。
2.1 系统的主控部分本设计选用了A TL 公司生产的89C4051单片机作为控制器。
AT89C51与其它各部分电路的关系为[1]:通过红外接收模块接收来自遥控器的命令;通过各个传感器接收外部环境的状态信息;通过2路PWM 信号给电机提供电压,控制轮子的速度和方向;由I/O 口信号控制三极管进而控制继电器驱动清扫、吸尘电机;通过捕获2个电机编码器信号检测轮速;通过多个I/O 口控制LCD;利用串口变并口芯片控制多个LED 指示灯和按键等。
系统结构如图1所示。
2.2 执行电机部分机器人的行进电机由驱动电路放大后驱动,考虑到电压、电流等因素,采用了L298N来驱动电机。
L298N是恒压恒流双H桥集成电机芯片,可同时控制2个电机,且输出电流可达到2A。
清扫和吸尘电机都是由继电器驱动的, AT89C51的I/O口只需要给一个信号,由三极管做开关驱动继电器,线圈通电,常开端口闭合,就可以驱动电机。
2.3 传感器模块该模块采用八个超声波传感器,分别由两个T6114模块带动,每个模块集成了4个通道的超声波检测部分,可同时用作4个超声波开关使用。
每一个超声波探测通道都有独立的状态输出。
模块(1)的四个传感器分别为左、左前、右、右前方向障碍检测传感器,接到AT89C51单片机的P2.0,P2.1, P2.2,P2.3引脚。
模块(2)的1,2号探头的输出输入给二输入与门,与门的输出端接到AT89C51的外部中断请求IN T1(P3.3)。
这两组探头并排安装在机器人的前方,只要其中的一路开关检测到障碍,就会触发AT89C51的外部中断,机器人停止后,根据模块(1)的四组传感器的检测值,判断障碍物的位置,采取相应的避障措施。
模块(2)的3、4号探头的输出接到AT89C51单片机的P2.4,P2.5引脚,用作光电编码器计数开始和结束的判断依据。
本课题中要求机器人实现遍历无障碍的区域,这就要求机器人在绕开障碍物以后要回到原来的行进路线上去。
为实现这个目标,需要记录下机器人在绕障过程中偏离原来路线的路程,我们利用光电编码器来实现这一功能。
光电编码器的输出端接单片机的外部中断IN T0。
2.4 输入输出部分2.4.1 红外遥控接收模块通用红外遥控系统由发射和接收2大部分组成,红外接收芯片选用W aitrony公司的PIC-2319SCL。
在遥控器上使用单片机进行红外功能编码,在机器人上,由于单片机处理任务很多,因此选用专用的解码芯片。
解码芯片是REALT EK公司生产的一种用于遥控小卡车的CM OS大规模集成电路RX6B,它有七个控制键来控制小卡车的移动。
由于编码和解码的振荡频率必须一致,频率的大小由OSCI和OSCO之间的电阻决定。
4个红外接收管的信号通过与门与芯片的输入端SI相连,使得解码芯片在接收到任意方向的红外线信号时都能正常工作。
2.4.2 键盘的工作原理本课题需要使用6个控制按键,为了节约单片机的I/O口,决定使用矩阵的方式通过五个通用I/ O脚来控制键盘,使用3 2的键盘结构。
本清扫机器人中,行线均使用了键盘中断模式,列线为普通I/ O口控制,因此程序的设计需要采取查询兼中断的方式来判断哪个按键被按下。
2.4.3 液晶显示器由于外围传感器和接口电路数目较多,而单片机的通用I/O管脚有限,若使用并行的液晶显示器,则无法满足要求,同时对液晶显示的反应速度没有严格的要求,故考虑更换串行的液晶显示器。
本课题选用了长沙太阳人电子有限公司生产的SM S0619段式数码液晶显示器。
3 系统软件设计图3 主程序流程图主程序任务是完成系统的初始化。
当前方没有障碍物时,机器人按照设定的路径前进。
本研究的路径覆盖算法基于静态结构化环境模型[2],在障碍物信息(位置和形状)预先给定的情况下,采用沿边走的路径规划算法,即让机器人沿着墙边或障碍物的边界移动,进行内螺旋式 回 字型路径规划,如图2所示。
图中箭头表示行走方向,(下转第9页)16 甘 肃 科 技 第24卷类活动,落实退耕还林还草的政策。
在其外围划出一定的缓冲区,减少人类活动,提高水源涵养能力。
3.2 必须尽快建立全流域水资源管理机构,统一分配和调度水资源按照科学分水、节约用水的原则,制定合理的分水制度,由省上统一协调石羊河流域各地区、各部门在用水上的关系。
除了平衡地区间的用水外,也要注意调整生活、生产和生态上的用水关系。
在城镇,要关闭企业机关事业单位自备水井,改由自来水公司统一供应。
在农村,要整合现有农业及人畜用水机井,不再打深井。
3.3 加大节水力度、科学筹划外流域调水要依靠市场机制来合理配置水资源,适度提高用水价格,促进节约用水。
对不同用水方向实行不同的水价。
要大力推广常规农业节水技术和行之有效的高新节水技术,提高水资源的利用效率[3]。
要逐步转产高耗水、高污染工业,积极推动废水的资源化利用。
民勤对外流域调水有强烈愿望,特别冀望小观音水库建设后,能向民勤大规模输水。
但2001年已经运行的民勤调水工程,仅完成调水设计规模的一半,原因是单方水的成本价达到0.3元以上,农民无力承担水费。
从目前的情势看,外流域调水对稳定民勤绿洲的生态系统具有巨大意义。
但调水量少了作用不大,大量调水不仅水源没有保证,而且成本过高,经济上难以承受。
而且远距离输水的损耗很大。
3.4 民勤生态移民目前,民勤湖区、永昌山区的人口外迁,是不得已的办法,是 一方水土养活不了一方人 情势下的必然现象,具有一定的合理性。
政府部门应予引导和组织,无论移居省外还是省内,应给以帮助和关心,而不是要求他们 守土有责 。
如果远距离输水,造成水的大量消耗,不如在水源就近地区,开发新的灌区,安置移民。
这样不仅成本较低,而且在移出人口地区,减少了生产、生活用水量,可增加生态用水,恢复生态环境。
3.5 加快产业结构调整,积极推进城镇化进程在石羊河流域,要改善生态环境、又要发展经济,就必需加快产业结构调整。
近些年,民勤湖区增加了棉花、茴香、苜蓿等耗水少的作物面积,减少了耗水多的作物。
其中,一亩苜蓿草可产干草1000多公斤,养羊、养牛或是出售干草,收益都比种粮食好,每亩耗水仅是种小麦的一半。
今年,民勤县的农业部门已把草田间作、种草养畜作为结构调整的重要举措来推广,这也是值得其它地区借鉴的。
同时,要依托当地的农产品资源,发展农产品加工,引导工业向城镇集中,提高人口的城镇化水平,减轻过多的人口因从事耗水较多的农业而对生态环境的压力。
参考文献:[1] 李晓青.农业水资源问题与高效利用[J].甘肃农业,2007,(07):61-62.[2] 胡玉婷.发展生态农业促进可持续发展[J].青海科技,2000,(03): 5.[3] 黄介生.也谈节水农业发展战略[J].中国农村水利水电,1999,(01):9-11.[4] 马军花.浅谈水资源保护的必要性和措施[J].河北建筑工程学院学报,2003,(02):86-88.(上接第16页) 直线表示行走路线,虚线表示返回停放位置的可能路径。
清洁机器人工作开始时先绕房间行走一周,以熟悉环境,计算出清洁面积,限定以后的运行路径的范围。
当前方检测到障碍时,触发外部中断INT1,进入避障中断服务子程序。
避障中断服务子程序主要完成的任务是:当机器人前方检测到障碍时,机器人先停止,然后根据左、左前、右、右前方的传感器检测信号来判断障碍的位置情况,通过改变电机驱动器的输人信号,调节电机转速和方向,使左右驱动轮电机产生差速,从而达到等转弯、避障的目的。
其他功能部分保证了机器人能够实现预定的功能,包括对时、实时显示时钟、红外遥控创建地图、安全检测路径覆盖算法以及遥控召回等。
系统的主程序流程图如图3。
4 结束语经实践证明,该智能清洁机器人基本满足了设计要求,能够进行实际工作。
不足的是路径规划部分还有待改善,软件部分对机器人的运动控制还应更加智能化,这些都是有待进一步改进的地方。
参考文献:[1] 张培仁.基于C语言编程M CS-51单片机原理与应用[M].北京:清华大学出版社,2002,32-45.[2] 梁喜凤.室内地面清洁机器人路径规划[J].中国计量学院学报,2006,17(1):64-689第5期 沈天成等:石羊河流域水资源现状及存在问题与对策。