两自由度机械手动力学问题
二自由度机械臂动力学分析

平面二自由度机械臂动力学分析姓名:黄辉龙 专业年级:13级机电 单位:汕头大学摘要:机器臂是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。
拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。
经过分析,得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。
关键字:平面二自由度 动力学方程 拉格朗日方程相关介绍机器人动力学的研究有牛顿-欧拉(Newton-Euler )法、拉格朗日(Langrange)法、高斯(Gauss )法等,但一般在构建机器人动力学方程中,多采用牛顿-欧拉法及拉格朗日法。
欧拉方程又称牛顿-欧拉方程,应用欧拉方程建立机器人机构的动力学方程是指研究构件质心的运动使用牛顿方程,研究相对于构件质心的转动使用欧拉方程,欧拉方程表征了力、力矩、惯性张量和加速度之间的关系。
在机器人的动力学研究中,主要应用拉格朗日方程建立机器人的动力学方程,这类方程可直接表示为系统控制输入的函数,若采用齐次坐标,递推的拉格朗日方程也可以建立比较方便且有效的动力学方程。
在求解机器人动力学方程过程中,其问题有两类:1)给出已知轨迹点上•••θθθ、及、,即机器人关节位置、速度和加速度,求相应的关节力矩矢量τ。
这对实现机器人动态控制是相当有用的。
2)已知关节驱动力矩,求机器人系统相应各瞬时的运动。
也就是说,给出关节力矩矢量τ,求机器人所产生的运动•••θθθ、及、。
这对模拟机器人的运动是非常有用的。
平面二自由度机械臂动力学方程分析及推导过程1、机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。
机器人动力学方程的具体推导过程如下:1) 选取坐标系,选定完全而且独立的广义关节变量n r ,,2,1,r ⋅⋅⋅=θ。
2) 选定相应关节上的广义力r F :当r θ是位移变量时,r F 为力;当r θ是角度变量时,r F 为力矩。
机械动力学第二章——两自由度振动讲解
k1 c1
F1(t)
m1
x1 k2
c2
F2(t)
m2
x2 k3
c3
建立坐标:x1,x2的原点分别取在m1,m 2的静平衡位置
受力分析:
F1(t)
F2(t)
k1x1
c1 x1
k2(x2-x1) m1
k2(x2-x1) m2
c2 (x2 x1) c2 (x2 x1)
k3x2
c3 x2
8
两自由度系统的振动微分方程
特解 2: x12 (t) sin 02t 2 , x22 (t) 2 sin 02t 2
由特解线性叠加可以得到通解:
x1(t) C1 sin 01t 1 C2 sin 02t 2
x2
(t
)
1C1
sin
01t
1
2C2
sin
02t
2
20
教学内容
两自由度系统的振动微分方程 两自由度系统的无阻尼自由振动 两自由度系统的强迫振动
21
两自由度系统的强迫振动
装在梁上或者板上的的转动电机,由于转子的不 平衡,或者说转子质量不均匀,在电机高速转动下,梁 或者板将发生上下振动。试问如何减小振动。 (1)提高电机质量 (2)增加阻尼 (3)动力吸振器
14
两自由度系统的无阻尼自由振动
图示两自由度系统,无阻尼,无激励
k1
k2
k3
m1
m2
振动微分方程为:
m1x1 (k1 k2 )x1 k2 x2 0 m2 x2 (k2 k3 )x2 k2 x1 0
令:
两自由度机械系统动力学
x2 y2 l2
15
第15页/共143页
另外,可以积分的速度约束也是完整约束。例如:直 线纯滚动的圆盘,速度满足如下约束关系:
x r
为速度约束,但可以积分,因此还是完整约束。
x r c
本课程只考虑完整约束,而且通常只考虑定常约束情 况。
M e
(1)
拉格郎日方程为
d dt
E qi
E qi
Qi
(2)
需要证明(1)是(2)的特例。
65
第65页/共143页
证明:对于单自由度系统,拉格郎日方程应为
d E
dt
E
Me
E
1 2
J e
2
E
Je
( d )
W Fk rk 0
k
(3-3)
18
第18页/共143页
也可以写成分解形式,即
W (X kxk Ykyk Zkzk ) 0
k
(3-4)
19
第19页/共143页
说明: (1)虚位移也叫可能位移,是在约束允许 的条 件下可能实现的无限小位移。与时间无关,可 用变分符号表示。变分与微分很相似,但对时 间冻结。 (2)力在虚位移上作的功叫虚功,因此虚位移 原理也叫虚功原理。 (3)理想约束的约束力在虚位移上不做功,所 以约束力不在方程中出现。
1 2
m2l2222
46
第46页/共143页
47
第47页/共143页
48
第48页/共143页
一类二自由度并联机器人的动力学分析

关键词 :动力学分析 ;模 态试验 ;并联机器人
中图 分类 号 :T l ; 0 2 HI3 0 3 9 文 献 标 志 码 :A 文 章 编 号 :09 — 17 2 1 )40 2 —7 4 32 3 (0 0 0 —3 20
Dy m i sAna y i fa 2 DO F na c l sso 一 Par le bo a l lRo t
2 C l g f c aiaadEet nc a u n iesyo c n e n eh oo y a un0 0 2 ,C ia . ol e h n l n l r i,T i a vr t f i c d c n lg ,T i a 3 04 e o Me c co y Un i S e a T y hn)
试验. 通过 简化模型的模 态分析 , 对样机进行直接 的动 态性能评估 , 获得 该时变机构 的模 态参数 变换规律.同时分析 了 该机构在典型位姿 处的整体模 型的模态 , 得到影响动平 台精度 的关键模 态 , 确认 了需要改进的 结构参数 . 试验 结果可
用 于改 善 机 构 的动 力 学性 能 . 过 对 比分 析 验 证 了本研 究 中提 出 的试 验 方 法 适 用 于 时 变模 态的 试 验 研 究 . 通
(.天津 大学 机 械 程 学 院 ,天津 30 7 ;2 1 0 0 2 .太原 科 技 大 学 机 械 电 子 程 学 院 ,太 原 0 0 2 ) 3 04 摘 要 : 为 了准确 评 价 机 构 动 态性 能 , 以模 态试 验 为主 要 内容 , 用 L 采 MS 动 态 分析 系统 对并 联 机 器人 进 行 了动 力学
一种两自由度并联机构的动力学分析
10
韩旭炤等:一种两自由度并联机构的动力学分析
第 10 期
Z
X2
A3
C2
兹
A2
茁2
2a O
l2
Zm B3
X
X1 C1
l1
B(1 B2) Om
Xm
茁1
A1 图 1 并联机构结构简图
Fig.1 Schematic Diagram of the Parallel Mechanism
它由杆 A iBi (i=1,2,3)、A 2A 3、B2B3 和两个滑块 Ci,i=1,,2 组
Dynamic Analysis of a 2-DOF Parallel Mechanism
HAN Xu-zhao,CHEN Yang-yang,GAO Feng,TIAN Lu
(School of Mechanical and Precision Instrument Engineering,Xi’an University of Technology,Shaanxi Xi’an 710048,China)
2 运动学解析
2.1 运动学逆解
所研究的平面二自由度并联机构结构简图,如图 1 所示。
来稿日期:2018-05-18 基金项目:陕西省科技发展计划(2013JQ7009);陕西省教育厅科技项目(14JK1527) 作者简介:韩旭炤,(1979-),男,宁夏人,博士研究生,讲师,主要研究方向:混联机床,机器人及微细加工技术
第二章两自由度机构动力学分析
r
17
F2 s2
M1
r
计算广义力:
动力学方程:
r 1 2m2 r Q1 J11q 2 J q m r Q2 2 22 2
18
1 J12 q 2 Q1 J11q 动力学方程: J q 2 Q2 21 1 J 22 q
差动轮系动力学方程,可以直接应用此结论式。
16
例5:已知:J1 A , m2 , J s 2 , M 1 , F2
重力略,建立运动方程。
s2
M1
F2
分析:选广义坐标: q1 , q2 r
方法1:
1 2 1 3 i21 , i22 2 2
2 0, 即H不动,则: 方法2: 令q
同理
1 0, 令q
1 i 即1轮不动,则: 2 H i22
3 i22 2
求:i31 , ห้องสมุดไป่ตู้32
1 1 ( ) 8
15
2 J H iH 2
计算广义力:
此为二阶非线性微分方程,用数值解法求解。
13
例4:已知差动轮系中:
,各轮质量略。
1 , H 求:
分析:取广义坐标: q1 1 , q 2 H
1 q1 2, 2 ', 3 q1 , q2
H q2
则:
1 H
14
求:i21 , i22
第二章 两自由度机构动力学分析
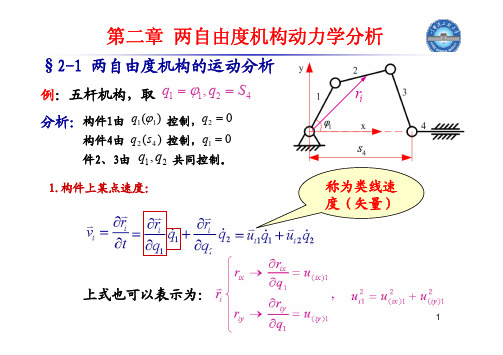
§2-1 两自由度机构的运动分析 例:五杆机构,取 q1 1 , q2 S 4
分析:构件1由 q1 (1 ) 控制,q2 0
构件4由 q2 ( s4 ) 控制,q1 0 件2、3由
二自由度机器人动力学控制及仿真研究
拉 格 朗 日函数 方 法 建 立 机 器 人 动 力 学 方 程 , 近 而确 立机 器人 动 力 学模 型 。基 于 永磁 同步 电机 建 立 伺 服 控 制 系统 , 利 用 机 器 人 的 位 置 控 制 与 电流 相 结 合 的 方 式 完 成 机 器 人 的 动 力 学控 制 。利 用 自适 应控 制 来 完成 机 器人 的 位 置 控 制 , 利 用滑 模 控 制 算 法 控 制 电机 。根 据 控 制 方 法 建 立 机 器人 和 伺服 控 制模 型 , 利 用 MA T L A B 中的 S i mu l i n k 模 块 进 行 仿 真 。仿 真 结 果 表 明 , 系统
by t he c om bi na t i o n o f t h e pos i t i on c on t r o l o f t h e r ob ot an d t he cu r r en t c on t r ol o f t h e mot or Us i n g a dap t i v e c on t r o l l er t O
・
对 机 器 人 控 制 的 研 究 一 般 是 将 驱 动 电机 控 制 和 机器 人 的 动
质 量表 示 整 个 杆 的质 量 ; 连杆的长度分别为 d 和d 。 根 据 机 器 人 求逆 解 的 方法 , 已知 C 点 的运 动轨 迹 , 可求得角位移 q 。 拉格朗 1 3函数 L = K — P 。其 中 , L是 拉 格 朗 1 3函数 , K是 系 统 动能 , P是 系 统 位 能 。
杨 彦 平 潘松 峰 周 真 诚 ( 青岛大学 自 动化与电气工程学院, 山东 青岛 2 6 6 0 7 1 )
摘要 : 根 据 所在 研 究 中 心机 器人 的 工作 模 式 , 把 二 自 由度 串联 型 机 器 人 的 关 节控 制 当成 经典 案 例 进 行 深入 探 讨 。 利 用
二自由度平面机器人的运动学方程
在研究二自由度平面机器人的运动学方程之前,首先我们需要了解什么是二自由度平面机器人。
二自由度平面机器人是指可以在平面上进行两个独立自由度运动的机器人,通常包括平移和旋转两种运动方式。
在工业自动化、医疗器械、航空航天等领域,二自由度平面机器人都有着重要的应用价值。
1. 二自由度平面机器人的结构和运动二自由度平面机器人通常由两个旋转关节和一个末端执行器组成。
这种结构可以让机器人在平面上实现灵活的运动,同时保持结构相对简单。
机器人可以通过控制两个旋转关节的角度来实现平面内的任意位置和姿态的变化,具有较高的灵活性和自由度。
2. 二自由度平面机器人的运动学方程接下来我们将重点讨论二自由度平面机器人的运动学方程。
运动学方程是描述机器人末端执行器位置和姿态随时间变化的数学模型,对于控制机器人的运动具有重要意义。
对于二自由度平面机器人来说,其运动学方程可以通过几何方法和代数方法来推导。
在几何方法中,我们可以利用几何关系和三角学知识来描述机器人末端执行器的位置和姿态。
而在代数方法中,我们可以通过矩阵变换和雅可比矩阵等工具来建立机器人的运动学方程。
3. 个人观点和理解在我看来,二自由度平面机器人的运动学方程是机器人控制和路径规划中的关键问题之一。
通过深入研究并掌握二自由度平面机器人的运动学方程,我们可以更好地设计控制算法、规划运动轨迹,实现机器人的精确操作和灵巧动作。
运动学方程的研究也为机器人的动力学分析和仿真建模提供了重要的基础。
总结回顾:通过本文的讨论,我们深入探讨了二自由度平面机器人的结构和运动特性,重点讨论了其运动学方程的推导方法和意义。
通过对运动学方程的研究,我们可以更好地理解机器人的运动规律和特性,为机器人的控制和路径规划提供重要的理论支持。
在文章中多次提及 "二自由度平面机器人的运动学方程",突出主题。
文章总字数大于3000字,能够充分深入地探讨主题,满足了深度和广度的要求。
并且在总结回顾中共享了自己的观点和理解,使得整篇文章更加有说服力和可信度。
二自由度机械臂动力学模型
二自由度机械臂的动力学模型通常涉及到两个主要的方面:几何构型和运动方程。
在建立动力学模型之前,首先需要确定机械臂的几何参数,包括每个关节的转动惯量以及各连杆的长度。
动力学模型可以分为两部分:静力学模型和动力学模型。
静力学模型关注的是力的平衡问题,即在机械臂的任意位置上,作用在机械臂上的所有外力之和等于零,所有外力矩之和也等于零。
动力学模型则进一步考虑了机械臂的运动情况,即在给定的力和力矩作用下,机械臂的运动如何变化。
为了建立动力学模型,我们通常采用牛顿-欧拉方法或者拉格朗日方法。
牛顿-欧拉方法从关节坐标出发,逐步推导出各关节的力和力矩,再结合连杆的长度,得到整个机械臂的动力学方程。
拉格朗日方法则是从能量的角度出发,利用动能和势能的关系来建立动力学方程。
具体来说,对于二自由度机械臂,其动力学方程可以表示为:
M(q)q'' + C(q, q', t)q' + G(q, t) = T(q, q', t)
其中:
- M(q) 是机械臂的质量矩阵,q是关节变量;
- q' 是关节变量的速度;
- q'' 是关节变量的加速度;
- C(q, q', t) 是由关节速度引起的科氏力和离心力等构成的矩阵;
- G(q, t) 是重力矩阵;
- T(q, q', t) 是外部施加的力和力矩。
在实际应用中,还需要对上述方程进行求解,这通常需要借助计算机模拟或数值积分方法。
通过求解动力学方程,可以预测机械臂在特定输入下的动态响应,这对于机械臂的控制系统的设计至关重要。
二自由度机械臂实验报告
二自由度机械臂实验报告实验报告课程名称: 机电系统建模与控制实验项目名称: 二自由度机械臂实验****: **组别:第6组成员:刘仕杰.胡据林.王昊阳.于骁实验日期:2019年12月9日一、实验简介二自由度(DOF)串联柔性(2DSFJ)机械臂包括两个用于驱动谐波齿轮箱(零回转间隙)的直流电机及一个双杆串联机构()。
两个连接都是刚性的。
主连接通过一个柔性关节耦合到第一个驱动器上,在其端部载有第二个谐波驱动器,该驱动器通过另一个柔性关节与第二个刚性连接耦合。
两个电机及两个柔性关节都装有正交光学编码器。
每一个柔性关节配有两个可更换的弹簧。
使用一个翼形螺钉零件,就可沿着支撑杆,将每根弹簧端移到所希望的不同定位点。
该系统可视为多种手臂式机器人机构的高度近似,是典型的多输入多输入(MIMO)系统。
二、实验内容1. 系统开环时域动态特性和频域特性分析;2. 应用极点配置方法设计控制器,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变极点分布位置,完成至少 2 组不同闭环参数性能对比;3. 应用 LQR 方法设计反馈控制律,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变 Q 和 R 的值,完成至少 2 组不同闭环参数性能对比;4. 设计全阶状态观测器,完成物理 PSF 与状态观测(至少两组观测器极点位置)综合作用下的系统性能控制。
三、实验设备1.设备构造与线路图(1)直流电机#1第一台直流电机为一台可在最高27V 下工作的Maxon273759 精密刷电机(90 瓦)。
该电机可提供 3A 的峰值电流,最大连续电流为 1.2A。
注意:施用在电机上的高频信号会对电机刷造成最终损坏。
产生高频噪音的最可能来源是微分反馈。
如果微分增益过高,噪音电压会被输入到电机里。
为保护您的电机,请将您的信号频带限制控制在 50Hz以内。
(2)谐波传动器#1谐波驱动器#1 使用谐波传动器LLC 生产的CS-14-100-1U-CC-SP 谐波减速箱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两自由度机械手动力学问题
1题目
图示为两杆机械手,由上臂AB、下臂BC和手部C组成。
在A处和B处安装有伺服电动机,分别产生控制力矩M1和M2。
M1带动整个机械手运动,M2带动下臂相对上臂转动。
假设此两杆机械手只能在铅垂平面内运动,两臂长为l1和l2,自重忽略不计,B处的伺服电动机及减速装置的质量为m1,手部C握持重物质量为m2,试建立此两自由度机械手的动力学方程。
图1
图2
2数值法求解
2.1拉格朗日方程
此两杆机械手可以简化为一个双摆系统,改双摆系统在B 、C 出具有质量m 1,m 2,在A 、B 处有控制力矩M 1和M 2作用。
考虑到控制力矩M 2的作用与杆2相对杆1的相对转角θ2有关,故取广义力矩坐标为
2211,θθ==q q
系统的动能为二质点m 1、m 2的动能之和,即
由图2所示的速度矢量关系图可知
以A 处为零势能位置,则系统的势能为
由拉格朗日函数,动势为:
广义力2211,M Q M Q ==
求出拉格朗日方程中的偏导数,即
代入拉格朗日方程式,整理得:
2.2 给定条件
(1)角位移运动规律
()231*52335.0*1163.0t t t +-=θ,()232*52335.0*1163.0t t t +-=θ
21θθ和都是从0到90°,角位移曲线为三次函数曲线。
(2)质量
m 1=4㎏ m 2=5kg (3)杆长
l 1=0.5m l 2=0.4m
2.3 MATLAB 程序
t=0:0.1:3;
theta1=-0.1163*t.^3+0.52335*t.^2; w1=-0.3489*t.^2+1.0467*t; a1=-0.6978*t+1.0467;
theta2=-0.1163*t.^3+0.52335*t.^2; w2=-0.3489*t.^2+1.0467*t; a2=-0.6978*t+1.0467;
m1=4; m2=5; l1=0.5; l2=0.4; g=9.8;
D11=(m1+m2)*l1.^2+m2*l2.^2+2*m2*l1*l2*cos(theta2); D22=m2*l2.^2;
D12=m2*l2.^2+m2*l1*l2*cos(theta2); D21=m2*l2.^2+m2*l1*l2*cos(theta2); D111=0;
D122=-m2*l1*l2*sin(theta2); D222=0;
D211=m2*l1*l2*sin(theta2); D112=-m2*l1*l2*sin(theta2); D121=-m2*l1*l2*sin(theta2); D212=0; D221=0;
D1=(m1+m2)*g*l1*sin(theta1)+m2*g*l2*sin(theta1+theta2);
D2=m2*g*l2*sin(theta1+theta2);
M1=D11.*a1+D12.*a2+D111.*w1.^2+D122.*w2.^2+D112.*w1.*w2+D121.*w2.*w1+D1; M2=D21.*a2+D22.*a2+D211.*w1.^2+D222.*w2.^2+D212.*w1.*w2+D221.*w2.*w1+D2; T1=polyfit(t,M1,3) T2=polyfit(t,M2,3)
subplot(2,1,1),plot(t,M1),grid on,xlabel('时间(s )'),ylabel('控制力矩(N·m )'),title('motion1') subplot(2,1,2),plot(t,M2),grid on,xlabel('时间(s )'),ylabel('控制力矩(N·m )'),title('motion2')
2.4 数值计算结果
()6167.1*7993.31*7329.3*5685.3t 231+++-=t t t M ()5449.1*9801.25*9481.8*0679.0t 232-+--=t t t M
图3 M 1变化规律图
图4 M 2变化规律图
3 ADAMS仿真
3.1模型建立
图5模型图
3.2 施加运动
在两个关节处分别施加位移函数
图6 关节运动施加图位移函数为:step(time,0,0,3,pi/2)
运动规律如下图所示:
图7 关节处运动规律图
3.3 运动仿真
设置仿真时间为3s,步数为300步,仿真结果如下图所示:
图8关节1处控制力矩仿真结果图
图9 关节2处控制力矩仿真结果图
4 结果对比
图10 控制力矩M1结果对比图
图11 控制力矩M2结果对比图
从函数规律上看,两种求解方法得出的结果几乎一样;
从数值上看:
表1 控制力矩M
表2 控制力矩M
由上两表可以看出:数值计算结果与仿真求解结果相差很小,误差范围为0.437%-0.731%,出现这种结果的原因可能是因为两种方法计算的精度不同,或者是算法存在差异。
如果对结果精度要求不是很高,可以认为两种方法求得的结果相等,进一步说明了仿真计算的可靠性。