四自由度机械手控制系统设计
四自由度工业装夹机械手液压系统的设计与分析
工 业 生产 中应 用 的机 械手 被 称 为工业 机 械手 ,是 典 型 的机 电一体
化产 品。
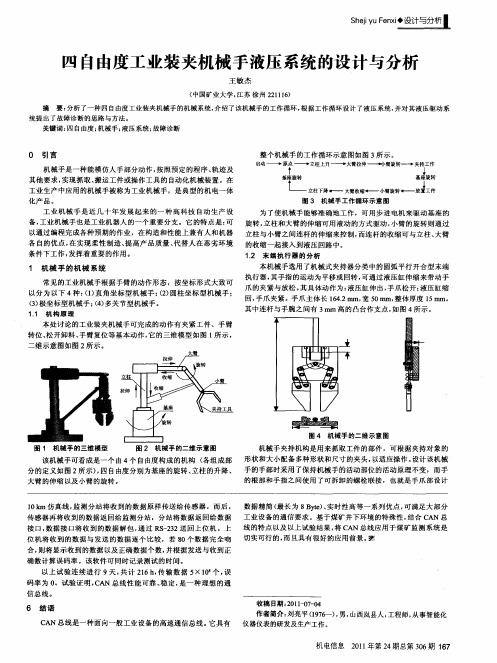
L 立下— 大收. 小旋. 放工 柱降 — 臂缩- 臂转_ 件 _ — - —
图 3 机械 手工作循环示意图
工 业 机 械 手 是 近 几 十 年 发 展 起 来 的一 种 高 科 技 自动 生 产 设
为 了使 机械 手 能够 准确 地 工作 ,可 用步 进 电机 来 驱动 基 座 的
备 , 业机 械手 也 是 工业 机器 人 的一 个重 要 分支 。它 的 特 点是 : 工 可 旋 转 , 柱 和大 臂 的伸 缩可 用 液动 的方 式 驱动 , 臂 的旋转 则 通过 立 小 以通 过 编程 完 成各 种 预期 的 作业 ,在 构造 和 性能 上 兼有 人 和机 器 立柱 与 小臂 之 间连 杆 的伸缩 来 控制 , 连杆 的 收缩 可 与立 柱 、 而 大臂
0 引 言
整 个机 械 手 的工作 循环 示 意 图如 图 3 示 。 所
启动 ——+ 原点 ——+ 立柱上升 ——+大臂拉伸 ——_I 、 按照预定的程序、 轨迹及
其 他 要求 , 现抓 取 、 实 搬运 工 件或 操 作工 具 的 自动化 机 械装 置 。在
分 的定 义如 图 2所 示) 四 自由度 分 别为 基座 的旋转 、 , 立柱 的 升 降 、 手的手部时采用了保持机械手的活动部位 的活动原理不变,而手 的根 部和 手指 之 间使 用 了可 拆卸 的螺 栓 联接 ,也 就 是手 爪 部设 计 大臂 的伸 缩 以及 小 臂 的旋转 。
P●■ —一
—— ——H
图 4 机械手 的二维 示意图
图 1 机械手 的三维 模型 图 2 机械手 的二维 示意图
四自由度机械手毕业设计

四自由度机械手毕业设计
四自由度机械手的毕业设计可以从以下几个方面入手:
1. 机械结构设计:根据所需的工作空间、负载要求、运动速度等参数,设计出四自由度机械手的整体结构。
其中,四自由度机械手的自由度一般包括三个旋转自由度和一个平移自由度。
2. 控制系统设计:根据机械手的运动方式和运动范围,设计出相应的控制系统。
可以采用传统的PID控制算法或者基于神经网络的控制算法,确保机械手的稳定性和精度。
3. 动力学分析:对机械手进行动力学分析,研究机械手在运动过程中的力学特性,比如加速度、速度、角加速度等参数,为机械手的优化提供理论依据。
4. 实验验证:经过机械结构设计、控制系统设计和动力学分析后,可以进行实验验证。
通过实验对机械手的运动精度、稳定性、负载承载能力等参数进行测试,对设计方案进行调整和优化。
以上只是一些可以从不同方面入手的思路,毕业设计的具体内容和难度还需要根据实际情况和要求进行具体确定。
四自由度机械手PLC控制

要 由 底 盘 、立 柱 、手 臂 和 手 爪 等 组 成 。
竖 轴步 进 电动机
横轴
图 1 机 械 手 的 结 构 示 意 图
图 1中 ,横轴 、竖 轴 是 机 械手 的手 臂 ,分 别 由步 进 电 动 机 驱 动 滚 珠 丝 杠 组 件 ,完 成 手 臂 的 伸 缩 半 径 和手 臂在 立柱 上 的升 降高度 改变 。手 爪 的夹 紧与松 开 由 1个 单 线 圈 双 位 置 电 磁 阀 控 制 ,当 电 磁 阀 线 圈 通 电 时 ,手 爪 张 开 ;当 线 圈 失 电 时 ,手 爪 夹 紧 (防 止 突 然 停 电 时 夹 持 物 体 掉 落 )。 手 腕 由 1个 直 流 电 动 机 驱 动 ,可 做 ± 270。的 转 动 。整 个 机 械 手 在 底 盘 的 带 动 下 ,由 1个 直 流 电 动 机 驱 动 ,可 做 4-270。的 摆 动 。
机 械 手 运 动 机 构 驱 动 方 式 主要 分 气 压 、液 压 和 电 动 3大类 。利 用 电气驱 动具 有 易 于 控 制 、运 动精 度 高 、使用方 便和驱 动效 率高等优 点 ,以及 易 于保养 、结 构简单 成本低 等 特点 j。本 文设 计 一种 采用 电动 与 气压复合 式 的驱动 系统 四 自由度 机械 手 ,采用 功能 强 大 、可靠性 高 、编程 简单 的可 编程 控制 器 来完 成 T件 的方位 判别和搬运 。
基于STM32的四自由度机械手臂设计

由于OV7670的像素时钟频率很高,故不是用单片机直接抓取的,而是 用FIFO暂存数据,以节省CPU资源。
2. 硬件搭建
关于机械手及舵机
舵机采用较为廉价的MG995,机 械结构由购买的散件组装而成。 最初采用6自由度结构,但在后 期调试过程中改为4自由度,将一个 舵机改用力矩更大、精度更高的数 字舵机。
S3
Value = servo_6[0][0]*s1/sum+servo_6[0][1]*s2/sum +servo_6[1][0]*s3/sum+servo_6[1][1]*s4/sum C(y)(x) = C(1,1) 映射关系如下 [0][0] = [y-1][x-1] [1][0] = [y][x-1] [0][1] = [y-1][x] [1][1] = [y][x]
关于16个标准区域的各舵机参数测量
void Change_Angle(u8 num_Sm,u16 value);
void Add_Angle(u8 num_Sm);
void Dec_Angle(u8 num_Sm); void Read_Angle(u8 num_Sm);
通过上位机想单片机发送以上四个函数, 人工引导机械手抓取各区域正中间的物体, 然后读取各舵机参数并建立数组
当四邻域中心确定时,四邻域在“表中的位置”就 可确定
3. 算法简介
(a,b)
S1
S2
四邻域中心点的确定方法
借鉴十进制中“四舍五入”的思想,根据目标中心坐标P(m,n) C(x,y) 通过“12舍13入”的方法计算C(x,y)
y = (m+12)/25;
a = m-12; l1 = x*25-1-b+1 l3 = y*25-1-a+1 S1
四个自由度机器人(4关节机械手)设计任务书.doc
四个自由度机器人(4关节机械手)设计任务书成都工业学院毕业设计任务书专业班次学生姓名指导老师设计评分设计(论文)题目四个自由度机器人专题任务开始日期2016 年 4 月22 日任务完成日期2016 年6 月 1 日设计人同组人等人指导老师(签名)教研室主任(签名)系主任(签名)(一)设计(选题)目的(包括原始数据)四个自由度机器人,很类似人的手臂的运动,它包含肩关节、肘关节和腕关节来实现水平和垂直运动,是一种固定式的工业机器人。
它具有四个自由度,其中,三个是旋转自由度,一个是移动自由度。
这类机器人结构轻便、响应快,它能实现球面范围内运动。
参数自由度4个抓重 5 Kg 运动参数大臂长700mm120回转角度)。
小臂长600mm100回转角度)。
手腕回转100回转角度)。
手臂升降100mm(升降距离)。
电机驱动。
(二)推荐主要参考资料【1】殷际英何广平编著关节型机器人北京化学工业出版社2003.07 【2】加藤一郎编著机械手图册上海上海科学技术出版社1979.01 【3】陆祥生杨秀莲编机械手理论及应用北京中国铁道出版社1983.03 【4】龚振邦机器人机械设计手册电子工业出版社1995 【5】伊藤洋三机构设计机械工业出版社1990 【6】周开勤机械零件手册高等教育出版社1993 【7】张建民工业机器人北京北京理工大学出版社1987 【8】张黎骅郑严编新编机械设计手册北京人民邮电出版社2008.01 【9】吴振彪主编机电综合设计指导中国人民大学出版社2000.09 【10】李振清主编机械设计简明手册兵器工业出版社1992.12 【11】王晓莉主编机械制图北京科学出版社2004.10.20 (三)设计工作任务及技术指标1、四个自由度机器人装配图2、机器人大臂装配图3、机器人小臂装配图4、机械手装配图5、零件图毕业设计评语指导教师评语。
基于S7-200PLC的四自由度机械手控制系统设计
摘
要: 设 计 了基 于 P L C的 四 自由度机 械 手控 制 系统 , 用P L C 实现 了外 来信 号 触发 的 对 电磁 阀的顺 序
l 3 l 4
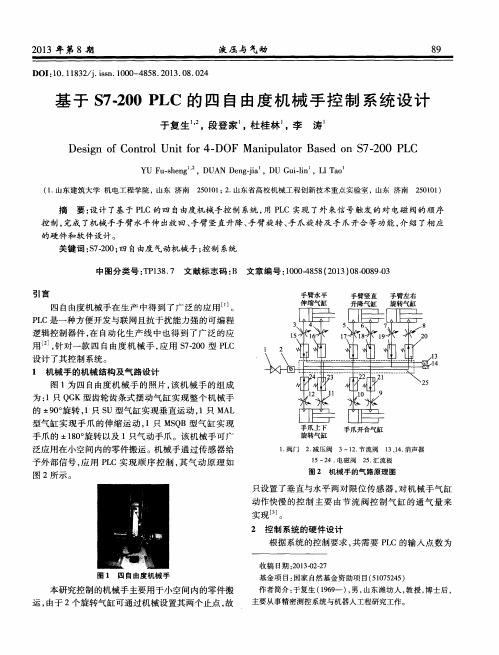
的 ±9 0 。 旋转 , 1只 S U型 气缸 实 现垂 直运 动 , 1只 MA L 型气 缸 实 现 手 爪 的伸 缩 运 动 , 1只 MS Q B型 气 缸 实 现
手 爪 的 ±1 8 0 。 旋源自 以及 1只气动 手爪 。该 机 械 手可 广
量 旋 转 气 ! 缸 手 爪开 一… 合 气 一 缸
收稿 日期 : 2 0 1 3 - 0 2 - 2 7 图 1 四 自 由度 机 械 手
基金项 目: 国家 自然基金资助项 目( 5 1 0 7 5 2 4 5 )
本 研究 控制 的机 械手 主要 用 于小 空 间内 的零件搬 运, 由于 2个 旋转 气 缸可 通过 机械设 置 其两 个止 点 , 故
引 言
手臂水平 伸缩气缸 手臂竖直 升降气缸 手臂左右 旋转气缸
四 自由度机 械 手在 生 产 中得 到 了广 泛 的应 用 … 。
P L C是一 种方 便 开发 与联 网且 抗干 扰 能力强 的可编 程
逻 辑控 制 器件 , 在 自动 化 生 产 线 中也得 到 了广 泛 的应 用 , 针 对一 款 四 自由度 机 械 手 , 应用 s 7 . 2 0 0型 P L C 设 计 了其控 制 系统 。 1 机械 手 的机 械 结构及 气 路设计 图 1为 四 自由度 机械 手 的 照 片 , 该 机 械 手 的组 成 为: 1只 Q G K型齿 轮齿 条式 摆 动 气缸 实 现 整 个 机械 手
四自由度机械手设计

四自由度机械手设计四自由度机械手是指具有四个独立运动自由度的机械手。
它可以在三维空间内进行灵活的运动和操作,广泛应用于工业制造、医疗护理、服务机器人等领域。
本文将从机械结构设计、运动控制系统、应用领域等方面进行论述,介绍四自由度机械手的设计。
首先,机械结构设计是四自由度机械手设计的关键。
通常,机械手由机械臂、末端执行器、关节驱动装置等组成。
在设计机械臂时,需要考虑结构的刚度、轻量化和尺寸设计等因素。
关节驱动装置可以采用电机驱动、气动驱动或液压驱动等方式,根据具体应用场景选择不同的驱动方式。
末端执行器是机械手最重要的部件之一,其设计要充分考虑操控对象的形状、尺寸和质量等要素。
其次,运动控制系统是确保机械手运动精度和灵活性的关键。
四自由度机械手通常采用闭环控制系统,通过传感器实时反馈机械手的位置、速度和力等信息,通过控制器计算控制命令,控制机械手的运动。
在控制系统设计中,需要考虑传感器的精度、控制器的计算能力和控制算法的设计等因素。
常见的控制算法有PID控制、模糊控制和自适应控制等。
最后,四自由度机械手应用领域广泛。
在工业制造中,机械手可以替代人工完成重复性、危险性和高精度的任务,如焊接、装配和搬运等。
在医疗护理领域,机械手可以用于手术助力、康复训练和辅助生活等。
在服务机器人领域,机械手可以用于家庭服务、餐厅服务和残疾人辅助等。
随着无人驾驶技术的普及,机械手还可以用于车辆维修保养和物流配送等场景。
总之,四自由度机械手的设计涉及机械结构、运动控制系统和应用领域等多个方面。
通过合理设计机械结构,构建高刚性、轻量化的机械手。
运动控制系统的设计保证机械手的运动精度和灵活性。
各个应用领域广泛使用四自由度机械手,提高生产效率和人类生活质量。
随着科技的不断进步,四自由度机械手在未来的应用前景将会更为广阔。
四自由度上下料机械手结构设计

四自由度上下料机械手结构设计英文回答:Designing a four-degree-of-freedom (4-DOF) pick-and-place robotic arm requires careful consideration of various factors. In this response, I will discuss the structural design of such a robotic arm and provide examples to illustrate my points.Firstly, the choice of materials for the robotic arm's structure is crucial. It should be lightweight yet sturdy enough to handle the weight of the objects being picked and placed. For example, carbon fiber or aluminum alloy can be suitable options due to their high strength-to-weight ratio.Next, the mechanical design of the arm should allow for smooth and precise movements. This can be achieved by using high-quality bearings and joints that minimize friction. Additionally, the arm should be designed to minimize backlash, which is the play or looseness in the joints thatcan affect accuracy. For instance, using precision gears and belts can help reduce backlash and ensure precise movements.Another important aspect of the design is the choice of actuators. Electric motors are commonly used as actuators for robotic arms due to their precise control and ability to generate high torque. For example, brushless DC motors can provide high torque and speed control, making them suitable for the arm's movements.Furthermore, the design should consider the workspace and reach of the robotic arm. It should be able to reachall desired locations within its workspace without any obstructions. For example, if the arm needs to pick and place objects on a conveyor belt, the design should ensure that the arm can reach all points on the belt without any interference.Additionally, the robotic arm should incorporate sensors for feedback and control. For example, position sensors can be used to accurately measure the arm'sposition and adjust its movements accordingly. Forcesensors can also be integrated to provide feedback on the amount of force applied during grasping and placing objects.中文回答:设计一个四自由度的上下料机械手需要仔细考虑各种因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起来的一种新型工业控制设备。
由于具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。
近年来,国内在PLC技术与产品开发应用方面发展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越多采用PLC控制系统采用控制系统取代传统的继电—接触器控制系统小;价格上能与继电—接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀,接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传播数据等。
本课题是基于PLC控制四自由度机械手运行。
工业机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通PLC自动控制对机械手实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析。
摘要随着工业机械手的进一步发展,其发展将更趋向于人性化、智能化并将在更加广泛的领域得到应用。
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力,受到人们的广泛重视和欢迎。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
通过对机械制造与自动化大学专科三年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,确定机械手的工作原理和运动机理。
设计了一种四自由度机械手,采用可编程序控制器(PLC)设计其控制系统,以提高其工作的稳定性能。
关键词:机械手梯形图 PLC 电磁阀AbstractWith the further development of industrial robots, and its development tends to be more humane, intelligent and in a wider range of applications. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role .Manipulator noted extensively and welcome by people for it has powerful vitality. Industrial robots can replace the hands of heavy labor, significantly reduce labor intensity, and improve labor productivity and automation level.Mechanical manufacturing and automation through the junior college for three years to integrate the knowledge of industrial manipulator mechanical structure and function of various parts of exposition and analysis to determine the robot motion principle and mechanism.Design a four-DOF manipulator to enhance the stability of their work for using the programmable logic controller to control system.Keywords: Manipulator Ladder diagram PLC Solenoid valve目录前言 (1)摘要 (2)第一章绪论 (5)1.1 本课题设计的背景 (5)1.2本课题设计的内容 (6)1.3 本课题设计的目的和意义 (7)第二章PLC的概述 (8)2.1 PLC介绍 (8)2.2 PLC的构成 (9)2.3 PLC 的外部设备 (10)2.4 PLC的工作原理 (10)2.5 PLC的优点 (12)第三章基于PLC的机械手控制方案的确定 (13)3.1 机械手的概述 (13)3.2 采用PLC控制机械手的优点 (13)3.3 机械手设计内容 (13)3.4 PLC的选型 (14)3.5 三菱FX系列的结构功能 (16)第4章功能实现与控制方式 (18)4.1 机械手模型的机能和特性 (18)4.2 夹紧机构 (18)4.3 躯干 (19)4.4 旋转编码盘 (19)第5章控制系统设计 (21)5.1 控制系统硬件设计 (21)5.2 PLC梯形图中的编程元件 (21)5.3 PLC的I/O分配 (22)5.4 机械手控制系统的外部接线图 (23)5.5 控制系统软件设计 (23)致谢 (36)参考文献 (37)附录(指令表) (38)第一章绪论1.1 本课题设计的背景1969年美随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
工人工作环境和工作内容也要求理想化简单化,对于一些往复的工作由机械手远程控制或自动完成显得非常重要。
这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。
在机械制造业中,机械手应用较多,发展较快。
目前主要应用于机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。
如果机械手发生某些偏离时,会引起零部件甚至机械本身的损坏,但若有了传感反馈自动,机械手就可以根据反馈自行调整。
应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
近些年,随着计算机技术、电子技术以及传感技术等在机械手中越来越多的应用,机械手已经成为工业生产中提高劳动生产率的重要因素。
借助PLC强大的工业处理能力,很容易实现工业生产的自动化。
基于此思路设计的机械手,在实现各种要求的工序前提下,大大提高了工业过程的质量,而且大大解放了生产力,改善了工作环境,减轻了劳动强度,节约了成本,提高了生产效率,具有十分重要的意义。
美国数字设备公司(DEC)研制出世界第一台可编程控制器,并成功地应用在美国(GM)的生产线上。
但当时只能进行逻辑运算,故称为可编程逻辑控制器,简称PLC(Programmable Logic Controller)。
70年代后期,随着微电子技术和计算机的迅猛发展,使PLC从开关量的逻辑控制扩展到数字控制及生产过程控制领域,真正成为一种电子计算机工业控制装置,故称为可编程控制器,简称PC(Programmable Controller)。
但由于PC易于个人计算机(programmable computer)相混淆,故人们仍习惯地用PLC作为可编程器的缩写。
1985年国际电工委员会(IEC)对PLC的定义如下:可编程控制器是一种进行数字运算的电子系统,是专为在工业环境下的应用而设计的工业控制器,它采用了可以编程的存储器,用来在内部存储执行逻辑运算、顺序控制、定时、计算和算术运算等操作的指令,并通过数字或模拟式的输入和输出,控制各种类型机械的生产过程。
PLC是继电器逻辑控制系统发展而来,所以它在数学处理、顺序控制方面具有一定优势。
继电器在控制系统中主要起两种作用:(1)逻辑运算(2)弱电控制强电。
PLC是集自动控制技术、计算机技术和通讯技术于一体的一种新型工业控制装置,已跃居工业自动化三大支柱(PLC、ROBOT、CAD/CAM)的首位,可编程控制器,简称PLC。
它在集成电路,计算机技术的基础上发展起来的一种新型工业控制设备。
具有1.可靠性高、抗干扰能力强 2.设计、安装容易,维护工作量少 3.功能强、通讯性好 4.开发周期短、成功率高 5.体积小、重量轻、功耗低等特点。
具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,已经广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。
与继电——接触器系统相比更加可靠;占位空间比继电——接触器控制系统小;价格上能与继电——接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀、接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传输数据等。
因此,进行机械手的PLC控制系统的设计,可以推动机械手行业的扩展,扩大PLC在自动控制领域的应用,具有一定的经济和理论研究的价值。
1.2本课题设计的内容现代工业生产对机械手的控制要求越来越高,若用传统的继电器控制方式进行控制,势必造成控制系统元件多,接线繁杂、稳定性差、故障率高,给工业生产带来很多不便。
针对这些问题此次设计选取性价比高的可编程控制器设计其控制系统。
课题以四自由度机械手的控制为研究对象,采取PLC设计其控制系统,实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析1.3 本课题设计的目的和意义机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
生产水平及科学技术的不断进步与发展带动了整个机械工业的快速发展。
现代工业中,生产过程的机械化,自动化已成为突出的主题。