四自由度机械手的设计与规划
四自由度工业装夹机械手液压系统的设计与分析
工 业 生产 中应 用 的机 械手 被 称 为工业 机 械手 ,是 典 型 的机 电一体
化产 品。
L 立下— 大收. 小旋. 放工 柱降 — 臂缩- 臂转_ 件 _ — - —
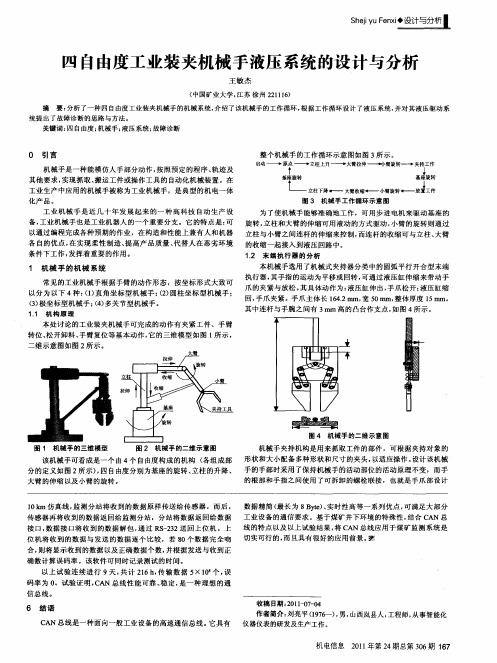
图 3 机械 手工作循环示意图
工 业 机 械 手 是 近 几 十 年 发 展 起 来 的一 种 高 科 技 自动 生 产 设
为 了使 机械 手 能够 准确 地 工作 ,可 用步 进 电机 来 驱动 基 座 的
备 , 业机 械手 也 是 工业 机器 人 的一 个重 要 分支 。它 的 特 点是 : 工 可 旋 转 , 柱 和大 臂 的伸 缩可 用 液动 的方 式 驱动 , 臂 的旋转 则 通过 立 小 以通 过 编程 完 成各 种 预期 的 作业 ,在 构造 和 性能 上 兼有 人 和机 器 立柱 与 小臂 之 间连 杆 的伸缩 来 控制 , 连杆 的 收缩 可 与立 柱 、 而 大臂
0 引 言
整 个机 械 手 的工作 循环 示 意 图如 图 3 示 。 所
启动 ——+ 原点 ——+ 立柱上升 ——+大臂拉伸 ——_I 、 按照预定的程序、 轨迹及
其 他 要求 , 现抓 取 、 实 搬运 工 件或 操 作工 具 的 自动化 机 械装 置 。在
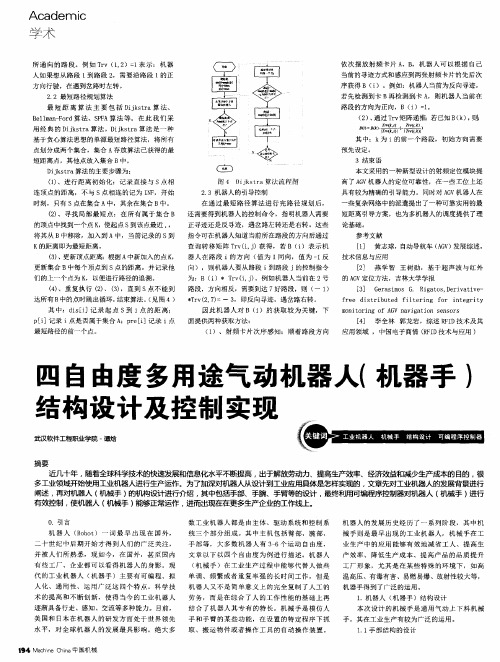
分 的定 义如 图 2所 示) 四 自由度 分 别为 基座 的旋转 、 , 立柱 的 升 降 、 手的手部时采用了保持机械手的活动部位 的活动原理不变,而手 的根 部和 手指 之 间使 用 了可 拆卸 的螺 栓 联接 ,也 就 是手 爪 部设 计 大臂 的伸 缩 以及 小 臂 的旋转 。
P●■ —一
—— ——H
图 4 机械手 的二维 示意图
图 1 机械手 的三维 模型 图 2 机械手 的二维 示意图
4自由度机械手设计

四自由度机械手设计摘要:工业机械手由机械本体、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产机械手的结构形式比较简单,通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
本课题将设计一个四自由度机械手,其中,三个移动自由度,需完成X、Y、Z三维空间内的移动要求,另外一个旋转自由度,完成手部的旋转运动要求。
它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
关键字:机械手;机电一体化;自由度The design of four degrees freedom mechanical handAbstract: Industrial manipulator is composed of machine body, controller, servo drive system and detection sensor device, a humanoid operation, automatic control, can repeat programming, to complete the electromechanical integration automatic production equipment of various operations in three-dimensional space. Especially suitable for the production of a variety of flexible, variable volume. Its stability, improve product quality, improve production efficiency, plays a very important role in improve working conditions and the rapid upgrading of products. Production of mechanical hand can improve the automation level of production, can reduce labor intensity, to ensure product quality, realize the structure safety of the manipulator is relatively simple, general machinery hand can quickly change the working procedure, strong adaptability, widely cited small batch production so it is in changing varieties in production.This paper will design a four DOF Manipulator, wherein, three degrees of freedom of movement, to complete the X, Y, mobile Z in the three-dimensional space, another rotational degree of freedom, rotational movement of the hand requirements. It can achieve planar motion, with the flexibility, the arm in the vertical stiffness, flexibility in the horizontal direction of the large, widely used in assembly operations.Keywords:Manipulator; mechatronics; degree of freedom目录摘要................................................................................................ 错误!未定义书签。
四自由度机械手毕业设计

四自由度机械手毕业设计
四自由度机械手的毕业设计可以从以下几个方面入手:
1. 机械结构设计:根据所需的工作空间、负载要求、运动速度等参数,设计出四自由度机械手的整体结构。
其中,四自由度机械手的自由度一般包括三个旋转自由度和一个平移自由度。
2. 控制系统设计:根据机械手的运动方式和运动范围,设计出相应的控制系统。
可以采用传统的PID控制算法或者基于神经网络的控制算法,确保机械手的稳定性和精度。
3. 动力学分析:对机械手进行动力学分析,研究机械手在运动过程中的力学特性,比如加速度、速度、角加速度等参数,为机械手的优化提供理论依据。
4. 实验验证:经过机械结构设计、控制系统设计和动力学分析后,可以进行实验验证。
通过实验对机械手的运动精度、稳定性、负载承载能力等参数进行测试,对设计方案进行调整和优化。
以上只是一些可以从不同方面入手的思路,毕业设计的具体内容和难度还需要根据实际情况和要求进行具体确定。
四自由度机械手设计

四自由度多用途气动机器人(机器手)结构设计及控制实现
芋 、 、 / 1 木、
依次 摆 放 射频 卡 片 A 、B ,机 器 人可 以根 据 自己 当前 的寻迹 方式和 感应 到两 张射 频卡 片的 先后 次 序 获得 B ( i )。例如 :机器 人当前 为反 向寻迹 , 若先 检测 到卡 B再 检测 到 卡 A ,则 机器 人 当前 在
技 术信 息与应 用
的顶 点中找到 一个 点 K , 使 起点 s 到 该点最 近 , ,
将 其从 B中移除 ,加入 到 A中 ,当前记 录 的 S 到 K的距 离 即为最短 距离 。
( 3 ) 、 更新顶 点距 离:根据 A中新 加入 的点 K ,
更新 集合 B中每 个顶 点到 s点 的距离 。并记 录他
爨 审
因 此机 器人 对 B ( i )的 获 取较 为 关 键 ,下
面 提供两 种获取 方法 :
( 1 )、射 频卡 片 次序 感 知 :顺着 路 段方 向
[ 4 ] 李全 林 郭龙岩 ,综 述 R F I D 技 术及 其 应用 领域 ,中国 电子商情 ( R F I D技术与 应用 )
们 的上 一个 点为 K , 以便 进行 路径 的追溯 。 ( 4 ) 、重 复执 行 ( 2 ) 、( 3 ) ,直 到 s点不 能 到 达所有 B 中 的点时跳 出循环 , 结束算法 ( 见 图 4) 其 中: d i s [ i ]记 录 起 点 S到 i点 的 距 离 ; P [ i ] 记录 i点是否 属于集 合 A ;p r e [ i ] 记 录 i点
所 通 向的 路 段 。例 如 T r v( I , 2 )= l 表 示 :机 器
人 如 果想 从路 段 l到路 段 2 ,需 要沿 路段 l的正
四个自由度气动机械手结构设计

四个自由度气动机械手结构设计1刖言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多自由度,可用来搬运物体以完成在各个不同环境中工作。
①1.1机械手简史现代工业机械手起源于20世纪50年代初,是基于示教再现和主从控制方式、能适应产品种类变更,具有多自由度动作功能的柔性自动化产品。
机械手首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机械手。
他的结构是:机体上安装一回转长机构,端部装有电磁铁的工件抓放机构,控制系统是示教型的。
球坐标式四自由度机械手项目设计方案

球坐标式四自由度机械手项目设计方案2 设计参数2.1设计题目球坐标式四自由度机械手设计2.2 初始参数与设计要求(1)抓重:100N(2)自由度:4个(3)臂部运动参数:表 2-1(4)腕部运动参数:表 2-2(5)手指夹持范围:棒料,直径φ40-φ60mm,长度450-1200mm(6)定位方式:电位器(或接近开关等)设定,点位控制(7)驱动方式:液压(中、低压系统)(8)定位精度:±3mm(9)控制方式:PLC控制3设计方案的拟定3.1初步分析该工业机械手的坐标形式是球坐标式,其臂部的运动由一个直线运动和两个转动组成,即沿X轴的伸缩,绕Y轴的俯仰和绕Z轴的回转。
这种机械手臂部的俯仰运动能抓取到地面上的物件,为了使手部能够适应被抓取对象方位的要求,常常设有手腕上下摆动,使其手部保持水平位置或其它状态。
这种形式的机械手具有动作灵活,占地面积小而工作范围大等特点,它适用于沿伸缩方向向外作业的传动形式。
但结构较复杂,此外,臂部摆角的误差通过手臂会引起手部中心处的误差放大。
3.2 执行机构3.2.1手部手部是用来直接抓取或握紧(或吸附)工件的部件。
由于被抓握工件的形状、尺寸大小、轻重和材料的性能、表面状况等不同,工业机械手的手部结构是多种多样的,大部分的手部结构都是根据工件的要求而设计的。
常用的手部结构有夹钳式、气吸式、电磁式以及其他形式。
夹钳式手部设计的基本要求(1)应具有适当的夹紧力和驱动力(2)手指应应具有一定的开闭范围(3)应保证工件在手指内的夹紧精度(4)要求结构紧凑、重量轻、效率高(5)应考虑通用性和特殊要求3.2.2腕部连接手部与臂部的部件,主要作用是在臂部运动的基础上进一步改变或调整手部在空间的方位,使机械手适应复杂的动作要求。
要求0-180°的回转动作,因此选用具有单自由度的回转液压缸驱动结构。
此结构特点是结构紧凑,灵活,但回转角度较小,并且要求严格密封,否则就很难保证稳定的输出扭矩。
四自由度机械手设计

四自由度机械手设计四自由度机械手是指具有四个独立运动自由度的机械手。
它可以在三维空间内进行灵活的运动和操作,广泛应用于工业制造、医疗护理、服务机器人等领域。
本文将从机械结构设计、运动控制系统、应用领域等方面进行论述,介绍四自由度机械手的设计。
首先,机械结构设计是四自由度机械手设计的关键。
通常,机械手由机械臂、末端执行器、关节驱动装置等组成。
在设计机械臂时,需要考虑结构的刚度、轻量化和尺寸设计等因素。
关节驱动装置可以采用电机驱动、气动驱动或液压驱动等方式,根据具体应用场景选择不同的驱动方式。
末端执行器是机械手最重要的部件之一,其设计要充分考虑操控对象的形状、尺寸和质量等要素。
其次,运动控制系统是确保机械手运动精度和灵活性的关键。
四自由度机械手通常采用闭环控制系统,通过传感器实时反馈机械手的位置、速度和力等信息,通过控制器计算控制命令,控制机械手的运动。
在控制系统设计中,需要考虑传感器的精度、控制器的计算能力和控制算法的设计等因素。
常见的控制算法有PID控制、模糊控制和自适应控制等。
最后,四自由度机械手应用领域广泛。
在工业制造中,机械手可以替代人工完成重复性、危险性和高精度的任务,如焊接、装配和搬运等。
在医疗护理领域,机械手可以用于手术助力、康复训练和辅助生活等。
在服务机器人领域,机械手可以用于家庭服务、餐厅服务和残疾人辅助等。
随着无人驾驶技术的普及,机械手还可以用于车辆维修保养和物流配送等场景。
总之,四自由度机械手的设计涉及机械结构、运动控制系统和应用领域等多个方面。
通过合理设计机械结构,构建高刚性、轻量化的机械手。
运动控制系统的设计保证机械手的运动精度和灵活性。
各个应用领域广泛使用四自由度机械手,提高生产效率和人类生活质量。
随着科技的不断进步,四自由度机械手在未来的应用前景将会更为广阔。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文提要随着大工业时代的到来,自动化设备代替人工作业成为现代化工业发展的一大趋势。
机械手作为一种自动化执行设备,解放了人类的双手,大大降低了工人的劳动强度,提高了工作效率。
它能模仿一些人手和手臂的动作,进行抓取、搬运或装配工作,被广泛应用在大型工厂的生产流水线上,尤其是在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,机械手的应用更加重要。
随着现代科技的发展,借助计算机辅助设计系统、计算机辅助制造系统,使机械手得到了更快的发展和应用,过渡到了一个新的工业自动化阶段。
本文主要是对四自由度机械手的结构设计和工作原理进行阐述和说明,并推导出了机械手的运动轨迹方程。
四自由度机械手的设计与规划摘要:随着大工业时代的到来,自动化设备代替人工作业成为现代化工业发展的一大趋势。
机械手作为一种自动化执行设备,解放了人类的双手,大大降低了工人的劳动强度,提高了工作效率。
它能模仿一些人手和手臂的动作,进行抓取、搬运或装配工作,被广泛应用在大型工厂的生产流水线上,尤其是在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,机械手的应用更加重要。
随着现代科技的发展,借助计算机辅助设计系统、计算机辅助制造系统,使机械手得到了更快的发展和应用,过渡到了一个新的工业自动化阶段。
本文主要是对四自由度机械手的结构设计和工作原理进行阐述和说明,并推导出了机械手的运动轨迹方程。
关键词:四自由度机械手自动化一、什么是机械手机械手是一种主要由机械主体、控制器、驱动系统和传感器装置等组成的,能模仿人手和臂的某些动作的运动机构。
机械手的设计是模仿人的动作,所以在设计机械手时,为了使机械手能更像人手那样灵活好用,可以遵循三个设计原则:一是使机械手的覆盖范围尽可能的大;二是使机械手可以根据外界的环境改变自己的运动姿态;三是在使自身重量足够小时,承受的负载足够大。
美国机器人工业协会定义了工业机械手的含义:机械手是一种可以用于移动各种生产材料零部件工具或专用设备的,并通过可编程序动作来执行各种任务的,具有编程能力的多功能自动化设备。
自从机械手被发明以来,工厂生产中相应的各种难题迎刃而解。
机械手被广泛应用于多品种、变批量的柔性生产中,改善了劳动条件,提高了产品质量和生产效率,在工农业生产中有着十分重要的意义。
机器人技术综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科知识,是当代研究十分活跃,应用日益广泛的领域。
一个国家工业自动化水平的重要标志就是这个国家对机器人的应用情况。
机器人是一种模拟人的电子机械装置,它综合了人的特长和机器特长,既拥有人在环境变化状态下的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,所以它并不是简单意义上的代替人工劳动,更确切的说,它是机器进化过程的产物,是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
机械手按照给定程序、轨迹和要求实现自动抓取、搬运或操作,模仿着人手的部分动作。
在工业生产中应用的机械手被称为“工业机械手”。
机械手在工业生产中的应用可以提高生产过程的自动化水平和劳动生产率,可以减轻工人的劳动强度、保证产品质量、实现安全生产;尤其是在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
所以它在机械加工、焊接、电镀、装配以及交通运输业等领域得到了越来越多的应用。
机械手由于结构形式简单,专用型强,而成为固定机床的附加装置,为机床的上下料提供了方便。
随着工业技术的发展,逐渐出现了能够独立的按照编好的程序来控制机械手以实现重复操作的通用型机械手,这种机械手适用范围比较广,在不断变换生产品种的中小批量生产中获得广泛的应用。
二、机械手的组成机械手主要由机构、驱动系统、控制系统等部件组成,如果用人的胳膊来比喻机械手的话,机构就相当于人的关节,驱动系统相当于人的“肌肉”,它们之间有如下关系:控制系统驱动系统机构1.机构:机构主要由传动部件和机械构件组成,有的还有行走机构。
机械手的执行机构主要作用于操作环境中的对象,包括臂和手。
臂由杆件和关节构成,关节是由内部装有电机等驱动器的运动副来实现。
关结及其自由度的构成方法极大地影响着臂的运动范围和可操作性等指标,机械手自由度越多,其运动越灵活,通用性更强,但结构也更复杂,刚性差。
机械手按杆件与关节连接的形式,可以分为开式链机械手和闭式链机械手。
机械臂可以改变对象的位置和形态的参数,或者对对象施加力的作用。
手部是抓握对象并将机械臂的运动传递给对象的机构。
如果我们能将手部设计的如同人手一样具有灵活性、通用性,使用起来就会非常理想。
但是现在还存在很多困难,以致这种万能手还不具备普适性。
那么我们可以把手部设计成单自由度的夹钳机构,用于简单的固定对象,抓取特定物体等固定的单一动作。
机械手固定在机座上执行各种动作,机座是机械手的基础部分,机械手机构的各部件和驱动系统均安装于机座上,起到了支撑和连接的作用。
2.驱动系统:驱动系统对于机械手来说是非常重要的部分,就像人的肌肉一样,它驱动着机械手的动力装置,调节装置和附属装置。
我们日常生活中常见的驱动系统主要有液压驱动、气压驱动还有电压驱动。
液压驱动系统主要由液压源、驱动器、伺服阀、控制器等构成,主要应用在重负载下具有高速和快速响应,同时要求体积小、重量轻的场合。
气压驱动系统由气压发生装置、执行元件、控制元件和辅助元件四部分组成。
其优点主要是由空气的可压缩性决定的,包括体积小,成本低,安全性高,无能量消耗等,可是也降低了驱动系统的刚度。
电压驱动系统是机械手驱动系统中使用最多的一种系统,被广泛应用于工业机器人及竞技用机器人。
常用的电压驱动器包括步进电机,直流伺服电机和交流伺服电机。
由于一般的伺服电机的输出转速很高,输出转矩小,而关节需带动的负载的转速不高,负载力矩却不小,因此,在电机与负载之间常用一套传动装置来进行转速和转矩的匹配。
3.控制系统各关节伺服驱动的指令值由主计算机计算后在每个采样周期给出。
计算机通过轨迹规划,得到空间轨迹在各采样时刻的数据,通过逆运动学计算把空间数据转变为各关节的指令值。
通常的机械手采用主计算机与关节计算机二级计算机控制。
有时为了实现智能控制,还需对包括视觉在内的各种传感信号进行采集、处理并进行人工智能的模式识别、问题求解、任务规划、决策判断,这时须由计算机系统完成。
三、机械手的整体设计人的手臂共有六个自由度,其中大臂和腕部能做两个方向的运动,手部可以做一个方向的运动以及局部有限的转动。
自由度是机械手设计的关键参数,自由度越多,机械手越灵活,通用性越广,但是其结构也越复杂。
在考虑机械手用途、成本及技术难度等问题后,本论文选择制作四自由度机械手,实现杆件的简单控制,以及通过舵机控制末端夹持器的自由开合,使其能够完成物体的抓取、移动、放置等动作。
机械手的原理图如图1所示机械手三号舵机四号舵机二号舵机一号舵机底座图1 机械手简图由图可知,四自由度机械手的结构包括固定底座、一号舵机、二号舵机、三号舵机、四号舵机、杆件、机械手等部分。
四、机械手中舵机的驱动控制舵机又叫做伺服马达,由于其容易与单片机系统接口相连接,而且控制和输出比较简单,所以舵机作为基本的输出执行机构被应用到微机电系统以及航模中。
舵机是一种位置伺服的驱动器,适用于那些需要不断变化角度并可以稳定保持的控制系统中。
舵机的工作原理是控制信号由接收机或者单片机发出信号给舵机,从而获得直流偏置电压。
舵机内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制是由PMW即脉宽调制法来实现的,一般需要一个20ms左右的时基脉冲,其脉冲宽度从0.5ms-2.5ms变化,对应舵盘的位置为0-180度,它们之间的对应关系是:脉冲宽度每增加0.5ms,舵盘位置改变45度。
如果控制脉冲的宽度改变过快,舵机就有可能跟不上,出现像步进电机那样一跳一跳的转动。
若要使舵机反应灵活,就要加快舵机的转速。
想要精确的控制舵机,就要选择合适的脉冲发生器。
以前选择用555触发器来调试舵机的驱动脉冲,但是调试工作相对麻烦而且运行可靠性不高。
所以现在大多采用单片机来控制舵机的运转,通过编程便可以实现让舵机从0度到180度的变化。
五、建立机械手的运动学方程因为机械手具有四个自由度,如果要让末端执行机构的位置相对于机械手本身不断的变化,就要对末端执行器进行精确的控制。
运动学是研究机械手运动的基础,利用矢量分析、矩阵等解析法,可以表达出机械手在任意空间的运动方程。
机械手由四个关节和四个杆件组成,利用D-H 表示法给四自由度机械手建立坐标系。
机械手各杆件坐标系均设置在上关节处,各Z 轴均垂直于纸面,取向外为正向,各X 轴均为各杆件的延长线。
坐标系如下图所示。
y 4 x 4 x 3y 3y 2 x 2 y 0 y 1 x 1x 0图2 机械手坐标系由图可以写出相邻杆件的位姿矩阵:M 01= 1000100sin 0cos sin cos 0sin cos 11111111θθθθθθl l - (式1) M 12= 1000100sin 0cos sin cos 0sin cos 22222222θθθθθθl l - (式2) M 23= 1000100sin 0cos sin cos 0sin cos 33333333θθθθθθl l - (式3) M 34= 10000100sin 0cos sin cos 0sin cos 44444444θθθθθθl l - (式4)根据以上式子可以看出,每个式子都表示了任意两个参考坐标系间的关系可以用一定的其次坐标变换来描述,这样的变换就是矩阵变换,包括两个旋转矩阵和两个平移矩阵。
如果将以上四式相乘,就可以得到机械手的总的变换矩阵,也就是正运动学分析。
机械手的运动学方程为:M 04=M M M M 34231201=10000100sin sin sin sin 0cos sin cos cos cos cos 0sin cos 12344123312211123412341234412331221112341234θθθθθθθθθθθθl l l l l l l l ++++++- 机械手控制的目的是让机械手准确快速地定位,所以研究机械手的正逆解问题显得尤为重要,通过对机械手各个杆件之间的位移、速度、加速度的关系进行研究,可以得到机械手运动的方程,为机械手的准确定位做好理论基础。