平面杆单元有限元分析
合集下载
弹性力学与有限元分析第二章-平面桁架有限元分析及程序设计

x
由单元①的刚度方程:
Fj
①
k
① ji
i
①
k
① jj
j
①
k
① ji
2
k
① jj
1
由单元③的刚度方程:
Fj
③
k
③ ji
i
③
k
③ jj
j
③
k
③ ji
3
k
③ jj
1
§2.3 结点平衡与整体刚度矩阵的集成
代入结点1的平衡条件:
k
l
xi
)
(dx j
dxi
)
(
yj
l
yi )
(dy j
dyi )
(dx j dxi ) (dy j dyi )
cos sin
由于杆件的变形产生位移:
ui dxi vi dyi
u j dxj v j dy j
因此,杆件应变为:
dl l
l
(ui
uj)
l
(vi
vj)
杆件轴力为:
(2k1 k2 )v4 P
结构的整体刚度系数
v4
P 2k1
k2
12 3
l2 l1 l1
4 P
N1
N1y
cos
k1v4
cos
k1P
(2k1 k2 ) cos
N2
k2v4
k2P 2k1 k2
位移法求解超静定结构。
§2.1 平面桁架单元的离散
结构的离散化:尽量将结构离散成数量最少的等截面直 杆单元
kki③ ③jii
ki③j
k
③ jj
3 3 3 3
§2.3 结点平衡与整体刚度矩阵的集成
2_杆系结构有限元分析1
( x) Nii N j j
x x N 1 , N 其中 i 为形函数。 j l l
由材料力学扭转可知
d dN e e M GI p GI p θ GI p B θ dx dx
其中 B
dN 1 1 dx l l
§1-2 扭转杆单元
e
外力势能 V u
e
e T
fe
e
1 e T e e e T 总势能 U V u K u u f e 2
e e
§1-1 拉(压)杆单元
1 e T e e e T U V u K u u f e 2
e e e
根据最小势能原理,势能泛函取驻值的必要条件
空间杆单元坐标变换矩阵
0 T 0
单元在两个坐标系中刚度矩阵转换关系同样有
K e T T K ' T
e
矩阵中仅仅包含有坐标的倾角,仅平行移动坐标轴,刚度矩阵 中元素值不变,矩阵的阶数也不改变。
§1-2 扭转杆单元
结点位移向量θe i , j
T
结点力向量
平衡关系
杆单元结点力向量
f U i
e
Uj
T
单元在外力和内力作用下处于平衡状态,反映单元平衡状态 的关系式就是刚度方程。下面利用最小势能原理推导单元的 刚度方程。 最小势能原理:在满足连续条件和边界条件的位移中,满足 平衡条件的位移其总势能最小,反之亦然。 单元总势能
e U e V e
M e Mi , M j
T
杆件发生自由扭转时,待求位移是截面的扭转角 ( x) 在局部坐标系中,每一个点将具有一个基本未知位移,最简单 的单元位移函数可以设为
结构分析的有限元法-第三章

式中
H 1 u B A yH v
(3.32)
而
H 0 u H 0 v 0 0 0 0 1 0 0 2 0 6x
(3.33)
单元刚度矩阵
再次应用式(2.70),并进行一系列的积分运算,可以得出单元刚度矩阵的显式如下:
l
K
e
E d A B B d x
0 1 l
Av
1
2 l
0 0 1 l 2 1 l
(3.21)
MATLAB不仅可以进行数值运算,也能进行符号运算。如式(3.20)中的矩 阵Au和Av的求逆运算,我们可以在MATLAB的命令窗口下输入 >> syms L >> Au = [ 1 0 1 L ] ; >> Av = [ 1 0 0 0 0 1 0 0 1 L L^2 L^3 0 1 2*L 3*L^2] ; 第一句是定义符号变量L,后面定义两个矩阵Au和Av。然后我们再输入下 面求逆的命令 >> inv(Au) ans = 0 1 1 [ 1, 0] Au [ -1/L, 1/L] 1 l 1 l >> inv(Av) ans = 0 0 1 [ 1, 0, 0, 0] 0 1 0 1 [ 0, 1, 0, 0] A v 2 2 3 l 2 l 3 l [ -3/L^2, -2/L, 3/L^2, -1/L] 3 2 3 1 l 2 l [ 2/L^3, 1/L^2, -2/L^3, 1/L^2] 2 l
根据材料力学的有关知识,我们可以立刻写出杆单元的结点位移与结点力 之间的关系为
FNi EA l (u i u j ) FNj EA l (u j u i )
第5章 杆单元和梁单元
1 u2 E (2) A(2) (2) 2 u3 l
1 1 u2 1 1 1 u 2 R2 3
u1 在这里,把表达成整体位移矢量 u 2 的函数,如下: u 3
5.1 杆件系统的有限元分析方法
(1) (1) (1)
F3 10N
,进行相应的单元应力计算。得到的结果如下:
0 u1 4 u2 2.5 10 m u 7.5 10 4 m 3
(2) ( x) 5 103 (1) 0.05MPa (2) = 0.1MPa
第五章 杆单元和梁单元
第5章 杆单元和梁单元
本章主要介绍利用杆单元及梁单元进行结构静力学的有限 元分析原理。首先介绍了杆单元的分析方法,详细给出了采用 杆单元进行有限元分析的整个过程;紧接着介绍了平面梁单元 ,以一个平面悬臂梁力学模型为分析实例,分别采用材料力学 、弹性力学解析计算以及有限元法进行了分析与求解,以加深 读者对有限元法的理解。
E (2) A(2) (2) u2 1 u2 l 0 F3 (2) (2) E A u3 2 u3 l (2)
5.1.1 一维杆单元
u2 由最小势能原理,势能函数对未知位移 求变分,满足 u3 的条件是 ,得如下方程式 0, 0
P 1 , u1
E e , Ae , l e
1
图 5-2 杆单元
P2 , u2
2
对于两个节点的杆单元,存在如下节点力和节点位移的关 系式 u P 1 e 1 (5.1) k
P2
u2
其中, k e 称为单元刚度矩阵
5.1.1 一维杆单元
杆梁结构有限元分析
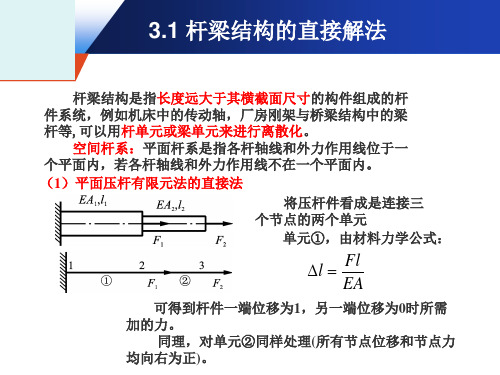
3.1 杆梁结构的直接解法
机械分社
(1)平面压杆有限元法的直接法
由节点平衡有: 即有:
U1(1)u1 U1(1)u2 N1
U
u (1)
21
(U
(2 2
)
U
(1) 2
)u2
U
(2 2
)u3
F1
U
(2 3
)
u2
U
(2 3
)
u3
F2
EA1 l1
u1
EA1 l1
u2
N1
EA1 l1
u1
( EA1 l1
3.1 杆梁结构的直接解法
机械分社
杆梁结构是指长度远大于其横截面尺寸的构件组成的杆 件系统,例如机床中的传动轴,厂房刚架与桥梁结构中的梁 杆等,可以用杆单元或梁单元来进行离散化。
空间杆系:平面杆系是指各杆轴线和外力作用线位于一 个平面内,若各杆轴线和外力作用线不在一个平面内。 (1)平面压杆有限元法的直接法
单元刚度矩阵每一列元素表示一组平衡力系,对于平面 问题,每列元素之和为零。
3.1 杆梁结构的直接解法
机械分社
(2)平面梁单元有限元法的直接法 2)节点位移与节点力之间的关系
Ui
Vi
k11
k21
M i U j
k31
k41
V
j
M j
k51
k61
他们在轴和轴的投影之和等于零:
vi
6EI l2
i
12EI l3
vj
6EI l2
j
M
j
6EI l2
vi
2EI l
i
6EI l2
vj
4EI l
有限元法(杆系)
Fjy
FFji Fj
s in cos s in
s in
0 0
0 0 0
0
cos s in
或 F(e) T F (e) (1)
Fiy
i
Fi i
Fix
拉压杆单元
0 Fi e
0 0 0
0 Fj 0
F jy
j
j
uiy ui
uix
u jy
y
Fj
F jx uj
u jx
2)
叠加形成总刚度矩阵,求位移
2sin2
0
sin2 EA sin cos
l
0
0
sin2
sin cos
0 2 cos2 1 sin cos
cos2 0 1
sin cos cos2
sin2 sin cos
sin2 sin cos
0 0 0 0
sin cos cos2 sin cos cos2
• 用单元节点位移表示单元内部位移
第 i 个单元中的位移用所包含的结点位移来表示:
u(x)
ui
ui1 ui Li
(x
xi )
(1- 1)
其中 u i 为第 i 结点的位移, xi 为第 i 结点的坐标。
第 i 个单元的应变为 i ,应力为 i ,内力为 N i :
i
du dx
ui1 ui Li
x
在局部坐标下,轴向力与轴向位移的关系:
(e)
Fi
1 0 1 0ui e
0
Fj
0
EA
0
0
l 1 0
0
0
0 1 0
0 0 0
有限元分析基本步骤

变形。
• 截面参数由用另外提供,材料和温度等也另外 提供。
• 对特殊行业,也可建立管单元。
2
• 二维单元
– 分类:面单元和板单元
– 特点:厚度远小于长度和宽度
– 节点连接:节点处铰接,传递平面内的力,不能传递 弯矩
– 形状:三角形或四边形
• 载荷
– 平面单元和板单元只承受平面内的载荷,不能传递力 矩
– 壳单元在节点处固接,可承受垂直于平面的载荷,可 传递任意方向的力并可传递弯矩和扭矩
• 如模块盒底板可建立壳单元
• 厚度尺寸和其他参数另外提供
3
• 三维单元
– 不能简化为二维问题的连续体。节点处铰 接,只传递力不能传递扭矩。单元形状为 六面体、或四面体、五面体。
– 实际问题模型可由多种模型结合。
• 则节点载荷为
{ } [ ] P e = Pxi Pyi Pxj Pyj Pxm Pym T
20
体积力移置
21
l ds
22
23
σ e = Dε e = DBeδ e = S eδ e
{ε}= [B]{δ }e
5. 建立单元刚度矩阵
• 由虚功原理可导出节点力和节点位移的关系。
• 设节点力为
Ui
0
∂Nm
0
∂x
[B]
=
1 2A
0 ∂Ni
∂Ni ∂y ∂Ni
∂x 0 ∂N j
∂N j
∂y ∂N j
∂x 0 ∂Nm
∂Nm ∂y ∂Nm
=
1 2A
b0i ci
0 ci bi
bj 0 cj
0 cj bj
bm 0
0
cm
cm bm
• 截面参数由用另外提供,材料和温度等也另外 提供。
• 对特殊行业,也可建立管单元。
2
• 二维单元
– 分类:面单元和板单元
– 特点:厚度远小于长度和宽度
– 节点连接:节点处铰接,传递平面内的力,不能传递 弯矩
– 形状:三角形或四边形
• 载荷
– 平面单元和板单元只承受平面内的载荷,不能传递力 矩
– 壳单元在节点处固接,可承受垂直于平面的载荷,可 传递任意方向的力并可传递弯矩和扭矩
• 如模块盒底板可建立壳单元
• 厚度尺寸和其他参数另外提供
3
• 三维单元
– 不能简化为二维问题的连续体。节点处铰 接,只传递力不能传递扭矩。单元形状为 六面体、或四面体、五面体。
– 实际问题模型可由多种模型结合。
• 则节点载荷为
{ } [ ] P e = Pxi Pyi Pxj Pyj Pxm Pym T
20
体积力移置
21
l ds
22
23
σ e = Dε e = DBeδ e = S eδ e
{ε}= [B]{δ }e
5. 建立单元刚度矩阵
• 由虚功原理可导出节点力和节点位移的关系。
• 设节点力为
Ui
0
∂Nm
0
∂x
[B]
=
1 2A
0 ∂Ni
∂Ni ∂y ∂Ni
∂x 0 ∂N j
∂N j
∂y ∂N j
∂x 0 ∂Nm
∂Nm ∂y ∂Nm
=
1 2A
b0i ci
0 ci bi
bj 0 cj
0 cj bj
bm 0
0
cm
cm bm
第二章 杆系结构的有限元法分析
F ⓔ Fxi
Fyi
Fzi
M xi
M yi
M zi
Fxj
Fyj
Fz j
M xj
M yj
T
M zj
EA
EA
l
0
0
0
0
0
0
l
0
0
0
0
Fxi
0
12 EI z l3
0
0
0
6 EI z l2
0
12EI l3
z
0
0
0
6 EI z l2
ui
Fyi
0
0
12EI y l3
0
6EI y l2
所谓杆件是指从构造上来说其长度远大于其截面尺寸的一维构件。在结
构力学上我们通常将承受轴力或扭矩的杆件称为杆,而将承受横向力和弯矩的杆 件称为梁。在有限单元法中这两种情况的单元分别称为杆单元和梁单元。但由于 在实际工程结构中,同一构件上,上述几种受力状态往往同时存在,因此为方便 起见,本书都称之为杆单元。并且,本书所讨论的杆单元均是指等截面直杆单元, 对于变截面杆和弯曲杆件,我们在进行单元划分时可以将其分为若干等截面杆单 元。因此本书的分析方法仍然对其适应。
在所有结构中,杆系结构是最简单的一类结构,也是我们在工程上最常
见的一类结构。如平面桁架、平面刚架、连续梁、空间刚架、空间桁架等都属于 此类结构,以此类结构为基础介绍有限单元法的分析过程。
首先了解一下有限单元法分析问题的基本步骤。
第一步:对结构物进行离散化,划分为有限个单元
3 2
4 5
1
6
1
2
3
4
5
第八步:引入边界条件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
显然是正交阵,即:
~ 1 ~ T T T
单元节点位移向量的变换式如下:
或
d Td
~ T 0 T ~ 0 T
其中:
同样可以得到单元节点力的变换式为:
f Tf
(2)刚度矩阵的坐标变换 局部坐标系下杆单元的刚度方程为:
把该方程扩充到2-D局部 坐标系x-y下的4阶形式:
fi k11 k12 ui f j k21 k22 u j
单元刚度矩阵的第i(i=1,2)列元素表示当维持单元 的第i个自由度位移为1,其它自由度位移为0时,施加 在单元上的节点力分量。
(也可以用此方法直接导出杆单元的刚度矩阵元素) 3)单元刚度矩阵对称、奇异、主对角元素恒正。
引入边界位移约束和载荷:
方程化为:
2 2 0 0 F1 EA 2 3 1 u P 2 L 0 F 0 1 1 3
上述方程组中删除第1,3个方程,得到: 2 2 0 0 F1 EA u P 2 3 1 2 L 0 F 0 1 1 3 解得:
例2:求杆两端的支反力
已知:
解:
先检查杆右端与墙壁是否接触。计算右端的自由 伸长:
所以,右端间隙将闭合,即节点3与刚性墙壁接触。
参照前面的讨论,可直接写出2单元系统平衡方程:
载荷与边界条件:
系统平衡方程为:
分离出第2个方程:
即:
得到:
节点位移列式:
根据求出的节点位移,用系统有限元方程中的 第1、3个方程可以求解支反力。
u1 0 PL u 2 1 u 3EA 0 3
即位移解为:
单元1应:
1 u 2 u1 E PL P 1 E 1 E E 0 L L L 3EA 3A
单元2应力:
u3 u2 E 2 PL P 2 E 2 E E 0 L L L 3EA 3A
——杆单元应变
——杆单元应力
应变—位移关系:
du dx
应力—应变关系:
E
下面通过二种方法研究杆单元的单元特性。 2.1.1 直接法导出单元特性(方法一) 杆单元伸长量: 应 变: 应 力: 杆内力:
u j ui
L E E L EA EA F A k L L
杆单元
目 标:通过杆单元特性方程的建立,初步掌握有限元法单元分析
的过程和原理,了解杆系结构分析的原理。
2.1、一维等截面杆单元及其刚度矩阵
考虑一个2节点一维等截面杆单元: L— 杆长
A— 截面积
E— 弹性模量 单元上的力学量和基本关系如下:
u u ( x)
——杆单元位移
( x) ( x)
vi) u (, i
u i , vi
(1)向量的坐标变换
节点的位移分量和节点力分量在2-D局部坐标系x-y下描述。节点上 的位移和节点力向量在2-D局部坐标系与2-D总体坐标系下的变换如下:
称为方向余弦
~ di Tdi
向量的坐标变换矩阵为:
m ~ l T m l
写成矩阵符号形式:
k d f
d Td
利用前面的向量坐标变换式,得:
f Tf
k Td Tf
考虑到变换矩阵的正交性,得:
k Td Tf
T k Td f
T
kd f
则,总体坐标系中的单元刚度矩阵为:
k T k T
T
用单元刚度矩阵装配结构(系统)刚度矩阵的 方法与1-D情况相同。
2.1.4 举例 例1 求图示2段杆中的应力。
解:结构分为2个杆单元,单元之间在节点2铰接。
2个杆单元的刚度矩阵分别为:
参考前面弹簧系统的方法,装配2杆系统的有限元 方程(平衡方程)如下:
2 2 0 u1 F1 EA u F 2 3 1 2 2 L u F 0 1 1 3 3
1 EA 0 L 1 0
0 1 0 ui f xi v f 0 0 0 i yi 0 1 0 u j f xj 0 0 0 v j f yj
(3)单元应力
即:
例题分析
单元计算汇总
则杆的轴向刚度:
EA k L
轴向拉压变形模式下,该杆单元的行为与弹簧单元 相同,因此杆单元的刚度矩阵为:
比照弹簧元的刚度方程,写出杆单元的刚度方程为:
f i k k ui EA 1 1 ui f u u k k 1 1 L j j j
2.1.3 关于杆单元的讨论 1)在单元局部坐标系下,每个节点一个未知位移分量和 一个自由度,单元共有2个自由度。 2)单元刚度矩阵元素的物理意义 刚度方程中令: ui 1 u j 0
单元刚度方程
则: f i k11 f j k21
由第1个方程可以得出:
由第3个方程可以得出:
2.2、2-D和3-D空间中的杆单元 (平面和空间桁架单元)
2.2.1 2-D空间中杆单元 1-D空间杆单元 坐标 变 换 2- D空间杆单元
基 本 思 想
原来1-D空间中的杆坐标系作为局部坐标系
局
部
总
体
x(, y )
每节点一个自由度
X,Y
每节点2个自由度