杆梁结构的有限元分析原理
杆梁结构的有限元分析原理
e
下面考察该简单问题的FEA求解过程。 (1) 离散化
两个杆单元,即:单元①和单元②
(2) 单元的特征及表达
对于二结点杆单元,设该单元的位移场为 么它的两个结点条件为
,那
设该单元的位移场具有模式(考虑两个待定系数)
利用结点条件,可以确定系数a0和a1,即
将系数a0和a1代入
,可将
表达成结点位移(u1, u2)的关系,即
其中, 为整体坐标系下的单元刚度矩阵, 为 整体坐标系下的结点力,即
由最小势能原理(针对该单元),将 对待定的 结点位移向量 取一阶极小值,有整体坐标系中 的刚度方程
对于本节给出的杆单元,具体有
4.3.3 空间问题中杆单元的坐标变换
就空间问题中杆单元,局部坐标系下的结点位移还 是 而整体坐标系中的结点位移为
这时由全部结点位移[0 u2 u3]分段所插值 出的位移场为全场许可位移场。
由最小势能原理(即针对未知位移u2和u3求 一阶导数),有
可解出
(5) 计算每个单元的应变及应力
在求得了所有的结点位移后,由几何方程
可求得各单元的应变
由方程 可求得各单元的应力
(6) 求结点1的支反力
就单元 ①的势能,对相应的结点位移求极值,可以 建立该单元的平衡方程,即
其中
由一维问题几何方程和物理方程,则该单元 的应变和应力为
其中
单元的势能
其中 叫做单元刚度矩阵。
叫做单元结点外载。
在得到“特征单元”的单元刚度矩阵和单元 结点外载后,就可以计算该单元的势能,因 此,计算各单元的矩阵 和 是一个关 键,下面就本题给出了个单元的 和 。
具体就单元①,有 单元①的结点位移向量
(5) 单元的刚度方程
2_杆系结构有限元分析1
( x) Nii N j j
x x N 1 , N 其中 i 为形函数。 j l l
由材料力学扭转可知
d dN e e M GI p GI p θ GI p B θ dx dx
其中 B
dN 1 1 dx l l
§1-2 扭转杆单元
e
外力势能 V u
e
e T
fe
e
1 e T e e e T 总势能 U V u K u u f e 2
e e
§1-1 拉(压)杆单元
1 e T e e e T U V u K u u f e 2
e e e
根据最小势能原理,势能泛函取驻值的必要条件
空间杆单元坐标变换矩阵
0 T 0
单元在两个坐标系中刚度矩阵转换关系同样有
K e T T K ' T
e
矩阵中仅仅包含有坐标的倾角,仅平行移动坐标轴,刚度矩阵 中元素值不变,矩阵的阶数也不改变。
§1-2 扭转杆单元
结点位移向量θe i , j
T
结点力向量
平衡关系
杆单元结点力向量
f U i
e
Uj
T
单元在外力和内力作用下处于平衡状态,反映单元平衡状态 的关系式就是刚度方程。下面利用最小势能原理推导单元的 刚度方程。 最小势能原理:在满足连续条件和边界条件的位移中,满足 平衡条件的位移其总势能最小,反之亦然。 单元总势能
e U e V e
M e Mi , M j
T
杆件发生自由扭转时,待求位移是截面的扭转角 ( x) 在局部坐标系中,每一个点将具有一个基本未知位移,最简单 的单元位移函数可以设为
结构分析的有限元法-第三章

式中
H 1 u B A yH v
(3.32)
而
H 0 u H 0 v 0 0 0 0 1 0 0 2 0 6x
(3.33)
单元刚度矩阵
再次应用式(2.70),并进行一系列的积分运算,可以得出单元刚度矩阵的显式如下:
l
K
e
E d A B B d x
0 1 l
Av
1
2 l
0 0 1 l 2 1 l
(3.21)
MATLAB不仅可以进行数值运算,也能进行符号运算。如式(3.20)中的矩 阵Au和Av的求逆运算,我们可以在MATLAB的命令窗口下输入 >> syms L >> Au = [ 1 0 1 L ] ; >> Av = [ 1 0 0 0 0 1 0 0 1 L L^2 L^3 0 1 2*L 3*L^2] ; 第一句是定义符号变量L,后面定义两个矩阵Au和Av。然后我们再输入下 面求逆的命令 >> inv(Au) ans = 0 1 1 [ 1, 0] Au [ -1/L, 1/L] 1 l 1 l >> inv(Av) ans = 0 0 1 [ 1, 0, 0, 0] 0 1 0 1 [ 0, 1, 0, 0] A v 2 2 3 l 2 l 3 l [ -3/L^2, -2/L, 3/L^2, -1/L] 3 2 3 1 l 2 l [ 2/L^3, 1/L^2, -2/L^3, 1/L^2] 2 l
根据材料力学的有关知识,我们可以立刻写出杆单元的结点位移与结点力 之间的关系为
FNi EA l (u i u j ) FNj EA l (u j u i )
杆梁结构有限元分析
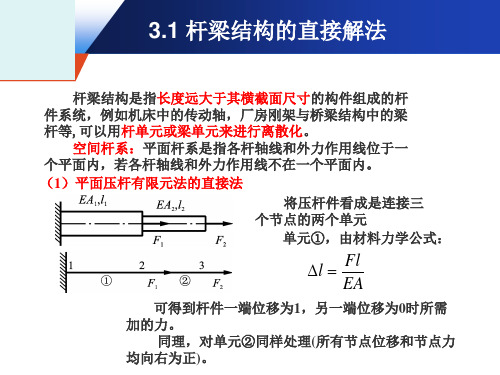
3.1 杆梁结构的直接解法
机械分社
(1)平面压杆有限元法的直接法
由节点平衡有: 即有:
U1(1)u1 U1(1)u2 N1
U
u (1)
21
(U
(2 2
)
U
(1) 2
)u2
U
(2 2
)u3
F1
U
(2 3
)
u2
U
(2 3
)
u3
F2
EA1 l1
u1
EA1 l1
u2
N1
EA1 l1
u1
( EA1 l1
3.1 杆梁结构的直接解法
机械分社
杆梁结构是指长度远大于其横截面尺寸的构件组成的杆 件系统,例如机床中的传动轴,厂房刚架与桥梁结构中的梁 杆等,可以用杆单元或梁单元来进行离散化。
空间杆系:平面杆系是指各杆轴线和外力作用线位于一 个平面内,若各杆轴线和外力作用线不在一个平面内。 (1)平面压杆有限元法的直接法
单元刚度矩阵每一列元素表示一组平衡力系,对于平面 问题,每列元素之和为零。
3.1 杆梁结构的直接解法
机械分社
(2)平面梁单元有限元法的直接法 2)节点位移与节点力之间的关系
Ui
Vi
k11
k21
M i U j
k31
k41
V
j
M j
k51
k61
他们在轴和轴的投影之和等于零:
vi
6EI l2
i
12EI l3
vj
6EI l2
j
M
j
6EI l2
vi
2EI l
i
6EI l2
vj
4EI l
第五章杆系结构的有限元法
第五章 杆系结构的有限元法 5.1 引言杆系结构是工程中应用较为广泛的结构体系,包括平面或空间形式的梁、桁架、刚架、拱等。
其组成形式虽然复杂多样,但用计算机进行分析时却较为简单。
杆系结构中的每个杆件都是一个明显的单元。
杆件的两个端点自然形成有限元法的节点,杆件与杆件之间则用节点相连接。
显然,只要建立起杆件两端位移与杆端力之间的关系,则整体平衡方程的建立与前几章完全相同。
杆端位移与杆端力之间的关系,可用多种方法建立,包括前面几章一直采用的虚功原理,但是采用材料力学、结构力学的某些结论,不仅物理概念清晰、直观,而且推导过程简单明了。
因此,本章将采用这种方法进行单元分析。
至于整体平衡方程的建立,则和前面几章所讲的方法一样,即借助于单位定位向量,利用单元集成法进行。
5.2 平面桁架的有限元分析平面桁架在计算上有以下几个特点: 1. 杆件的每个节点仅有两个线位移; 2. 杆件之间的连接为理想铰,即在节点处各杆件可相对自由转动,且杆件轴线交于一点。
3. 外载荷均为作用于节点的集中力。
由于以上特点,所以在理论上各杆件只产生轴向拉、压力,截面应力分布均匀,材料可得到充分利用,因此桁架结构往往用于大跨结构。
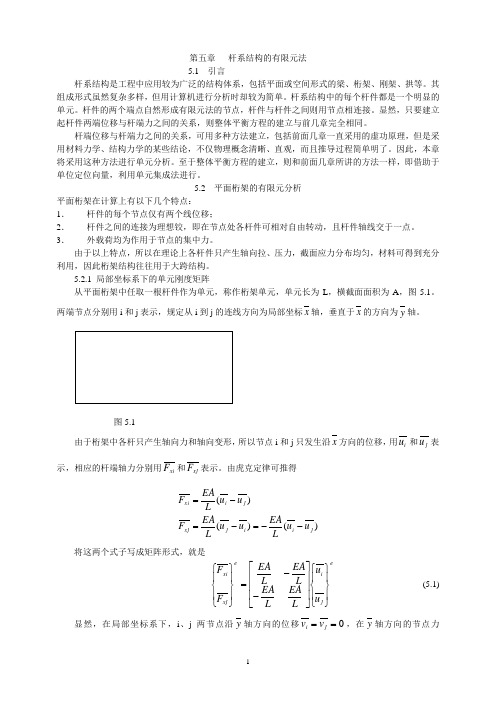
5.2.1 局部坐标系下的单元刚度矩阵从平面桁架中任取一根杆件作为单元,称作桁架单元,单元长为L ,横截面面积为A ,图5.1。
两端节点分别用i 和j 表示,规定从i 到j 的连线方向为局部坐标x 轴,垂直于x 的方向为y 轴。
图5.1由于桁架中各杆只产生轴向力和轴向变形,所以节点i 和j 只发生沿x 方向的位移,用i u 和j u 表示,相应的杆端轴力分别用xi F 和xj F 表示。
由虎克定律可推得)()()(j i i j xj j i xi u u L EA u u L EA F u u LEAF --=-=-=将这两个式子写成矩阵形式,就是e j i exj xi u u L EA LEA L EA L EA F F ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧ (5.1)显然,在局部坐标系下,i 、j 两节点沿y 轴方向的位移0==j i v v ,在y 轴方向的节点力0==yj yi F F 。
连续体弹性问题的有限元分析原理
上图所示三结点三角形2D单元,结点位移向量 和结点力向量 为
下面,我们需要将所有力学参量用结点位移向量 来表达。
(1) 单元位移场的表达 就三结点三角形2D单元,考虑到简单性、完备性、 连续性及待定系数的唯一确定性原则,选取位移模 式为
(1)
由结点条件,在x=xi,y=yi处,有
(2)
将(1)代入结点条件(2)中,可求解(1)中的 待定系数,即
其中元应力矩阵。
(4) 单元的势能的表达
其中 是单元刚度矩阵,即 t为平面问题的厚度。
势能公式中的 为单元结点等效载荷,即
其中 为单元上作用有外载荷的边。 为 线积分 (5) 单元的刚度方程
讨论1:平面三结点三角形单元的结点位移和坐标变换
(1) 单元位移场的表达
从图中可以看出,结点条件共有8个,即x方向4 个(u1,u2,u3,u4),y方向4个(v1,v2,v3, v4),因此,x和y方向的位移场可以各有4个待 定系数,即取以下多项式作为单元的位移场模式
它们是具有完全一次项的非完全二次项,其中以 上两式中右端的第四项是考虑到x方向和y方向的 对称性而取的,而未选x2或y2项。
讨论2:四结点矩形单元的应变和应力为一次线性 变化
四结点矩形单元的位移在x,y方向呈线性变化,所 以称为双线性位移模式,正因为在单元的边界 x=±a和y=±b上,位移是按线性变化,且相邻单元 公共结点上有共同的结点位移值,可保证两个相邻 单元在其公共边界上位移的连续性,这种单元的位 移模式是完备和协调的,它的应变和应力为一次线 性变化,因此比三结点常应变单元精度高。
对应于连续体的力学分析,有限元分析的一 般过程如下:
(1) 原连续体(几何上)的逼近离散
其中 为单元。 (2) 单元特性的研究 研究单元特性以形成单元刚度矩阵和结点外载矩阵 • 结点自由度(位移)描述:
杆结构 分析的有限元方法(有限元)
杆单元形状函数
杆单元刚度矩阵
平面问题中的坐标变换
梁结构分析的有限元方法
梁:承受横向荷载和弯矩的杆件。
梁的主要变形为挠度v
横截面变形前后都垂直于杆变形前的轴线x轴
中性层变形=0
纯弯曲没有剪力,只有弯矩
梁截面的惯性矩
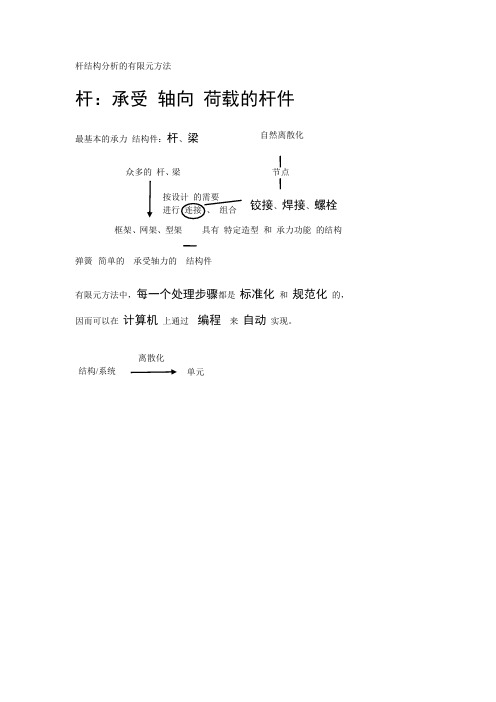
杆结构分析的有限元方法
杆:承受轴向荷载的杆件
最基本的承力结构件:杆、梁
弹簧--简单的承受轴力的结构件
有限元方法中,每一个处理步骤都是标准化和规范化的,
因而可以在计算机上通过编程来自动实现。
F=kδ
k--刚性系数
位移的绝对变化量/杆件的伸长量δ=u2—u1
应力某截面上单位面积上的内力/内力的分布集度
应变相对伸长量单位长度的伸长量
杆单元的特性是节点位移及节点力的方向都是沿轴线方向。
杆结构的力学分析
铰接的杆结构----杆只受轴力-----杆件拉伸问题---可自然离散
两端为铰接的杆件只承受轴力。
各个单元研究(基于局部坐标系的表达)
各个单元研究
离散单元的集合、组装
杆单元及坐标变换
自由度:描述物体位置状态的每个独立变量。
对于杆单元,其节点位移有两个自由度。
杆梁结构的有限元分析原理
杆梁结构的有限元分析原理杆梁结构是工程中常用的一种结构形式,它由多个杆件或梁组成,用于承担载荷和传递力量。
有限元分析是一种通过将结构离散为许多小单元,利用数学方法对结构进行分析的技术。
下面将详细介绍杆梁结构的有限元分析原理。
一、杆件离散化在有限元分析中,首先需要将杆梁结构离散化为一组子结构,即离散化为一组离散的杆件。
离散后的每个杆件可以看作是一个子系统,每个子系统由两个节点组成,节点之间以杆件连接。
通过节点与杆件的连接方式,能够模拟出整个杆梁结构的受力特点。
离散化的过程中,需要确定杆件的几何形状、截面以及材料特性等参数,并根据实际情况设置合适的杆件单元数目。
通常,单元数目越多,离散程度越高,结果越接近真实情况,但计算成本也会增加。
二、有限元法的基本原理有限元方法的基本原理是将结构分成许多小的单元,每个单元内的行为可以用简单的数学函数来表示。
对于杆梁结构,常用的单元有梁单元和杆单元。
梁单元适用于承受弯曲强度较大的杆件,而杆单元适用于承受轴向载荷的杆件。
通过将结构分成小单元后,可以建立一个与原结构相似的离散模型,并在每个单元上建立相应的方程。
三、应力应变关系在进行有限元分析时,需要获得每个杆件的应变和应力。
应变与杆件的变形有关,而应力与应变之间的关系则与材料的本构关系有关。
对于线弹性材料,应力与应变之间可以通过胡克定律来描述。
胡克定律表明,应力与应变之间成线性关系,材料的弹性模量E、泊松比ν以及应变关系能够决定应力。
应根据结构中不同材料的应变特性来选择相应的材料模型。
四、施加边界条件在进行有限元分析前,需要施加适当的边界条件。
边界条件用于模拟实际情况中的约束和限制。
常见的边界条件有固定边界、弹性边界和施工阶段边界。
五、求解位移和应力当离散化杆梁结构、建立了位移和应变关系、施加了边界条件之后,可以通过数值求解方法,例如有限元法中的坐标变形法,计算得到结构的位移和应力。
坐标变形法能够基于得到的位移结果,进一步计算应力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对剪切变形的影响
3.1 理论
只考虑剪切变形
变形后轴线切向与变形前轴线之间的转角 β( x).
8
β( x) 相应给出沿着中线剪切角 γxz 其中 ψ (x) 为只考虑梁弯曲理论中的线性单元转角. 假设 : 截面上均匀分布剪应变
弯曲产生的位移:
9
内部力
其中假设
10
实际上τxz采用以下形式:
其中变量与z相关。 为了确定截面的不均匀剪应力分布,引入因素k修正剪应 力:
or
or
where
k —— 曲率 M, Q —— 弯矩,剪力 I —— 惯性矩
4
最小势能原理 典型 C 1 连续问题 通常梁分析中常用2节点Hermite单元
5
其中
引入变形到最小 ΠP , 得到
6
Pj —— 集中荷载; Mj —— 弯矩力偶。 e.g. 对于均匀分布荷载
7
§3. 铁木辛柯梁理论
30
31
32
BEAM188 3-D Linear Finite Strain Beam BEAM188 is suitable for analyzing slender to moderately stubby/thick beam structures. This element is based on Timoshenko beam theory. Shear deformation effects are included.
11
其中k为与截面及泊松比µ相关的函数,可从弹性理论推导得到 假设3.2 离散公式
铁木辛柯梁单元—采用两个独立变量
挠度 w
截面曲率,不考虑剪切 每个单元的节点数量 Lagrange插值函数
14
15
16
挠度与转动采用了同阶的插值表示式。
dw/dx 与ψ不同阶,因此,泛函中的第二项 中的dw/dx-ψ的积分,对于柔性梁(l/n 趋于 无穷大时)会被严重放大。
21
22
➢结构离散 取杆件与杆件交点、集中力作用点、杆件与支承
的交点为节点。相邻两节点间的杆件段是单元。节 点编号时力求单元两端点号差最小。
23
➢坐标系
有限元中的坐标系有整体坐标系和局部坐标系。 对于一个结构,整体坐标系一般只有一个;而局部 坐标系有很多个,一个单元就有一个局部坐标。并 且局部坐标系每一个单元的规定都是相同的,这样, 同类型单元刚度矩阵相同。
y
i· z
·x
j
25
平面桁架杆单元(2D LINK1) 空间杆单元(3D LINK8) 平面刚架,BEAM3 空间梁单元(BEAM4)
26
Ansys 2-D Elastic Beam
three degrees of freedom at each node
27
BEAM3 is a uniaxial element with tension, compression, and bending capabilities
28
29
3-D Elastic Beam six degrees of freedom at each node BEAM4 is a uniaxial element with tension, compression, torsion, and bending capabilities.
BEAM24 3-D Thin-walled Beam The element has plastic, creep, and swelling capabilities in the axial direction as well as a user-defined cross-section.
BEAM44 3-D Elastic Tapered Unsymmetric Beam This element allows a different unsymmetrical geometry at each end and permits the end nodes to be offset from the centroidal axis of the beam
y
Y
xy
x
○
X
○○
○ ○
P
24
杆系结构单元主要有铰接杆单元和梁单元两种 类型。它们都只有2个节点i、j。
➢ 约定:单元坐标系的原点置于节点i;节点i到j的
杆轴(形心轴)方向为单元坐标系中x轴的正向。 y
轴、z轴都与x轴垂直,并符合右手螺旋法则。 ➢ 对于梁单元, y轴和z轴分别为横截面上的两个惯 性主轴。
平面梁-梁的-各假设个横Pla截ne-b面eam在-a变ssum形pt后ion仍保持为平 面中面,法并线在仍变垂形后直仍于保持变和形中面后垂的直的轴直线法线,假只设是横截 面小绕变某形理一论轴旋转了一个角度。
One-variable beam theory 几何关系
物理关系(应力应变关系)
3
平衡方程 边界条件
有限元程序设计
——梁单元,静力问题
1
§1. 介绍. 框架结构,例如桁架、桥梁
轴力构件 axial elements 杆 受弯构件 flexural elements 梁 平面梁单元 plane beam element
2
§2梁. 经在典梁纯单弯元 曲(Be时rno的ulli平-Eu面ler)假Bea设m :
BEAM23 2-D Plastic Beam a uniaxial element with tension-compression and bending capabilities
BEAM54 2-D Elastic Tapered Unsymmetric Beam This element allows a different unsymmetrical geometry at each end and permits the end nodes to be offset from the centroidal axis of the beam
除非ψ是常数(没有弯曲变形),否则, dw/dx-ψ不会为零。这种现象称为剪切闭锁。 shear-locking
17
几种方法避免产生剪切闭锁
减缩积分
数值积分采用比精确积分要求少的积分点数
假设剪切应变 替代插值函数
举例说明
18
19
Timoshenko 梁 (采用精确积分)
20
采用缩减积分