!!!!比例变量泵控马达系统的建模与仿真
基于AMESim和Simulink联合仿真的定量泵-变量马达系统转速控制研究
基于AMESim和Simulink联合仿真的定量泵-变量马达系
统转速控制研究
邬凯;陈朋威
【期刊名称】《价值工程》
【年(卷),期】2024(43)9
【摘要】本文使用了AMESim和Simulink软件构建了定量泵-变量马达系统仿真模型,用于定量泵-变量马达系统的分析,并采用Simulink为主的联合仿真方法。
进行了PID和模糊PID两种控制策略的比较研究。
结果表明,与传统PID控制相比,模糊PID控制策略在系统响应时间和稳定性方面表现更出色,尤其在恒转速控制方面表现更佳。
【总页数】4页(P136-139)
【作者】邬凯;陈朋威
【作者单位】陕西工业职业技术学院机械工程学院;复合型移动机器人陕西省高校工程研究中心
【正文语种】中文
【中图分类】TH137
【相关文献】
1.基于AMESim/Simulink的轮式两栖车静压行驶驱动系统马达同步控制联合仿真研究
2.基于AMESim和Simulink联合仿真的阀控马达转速控制
3.变转速输入定
量泵-恒转速输出变量马达系统恒转速控制方法研究4.基于AMESim和Simulink 联合仿真的马达转速自适应控制
因版权原因,仅展示原文概要,查看原文内容请购买。
研究有关电液比例阀控液压调平系统设计与仿真
高技术的现代战争要求地面雷达具有良好的机动性能。
雷达天线车的快速架设、调平和撤收系统是雷达的重要系统之一,直接影响到雷达的机动性能。
电液比例控制技术填补了开关液压控制技术与伺服控制技术之间的空白,已成为液压技术中最富活力的分支。
把电液比例阀控技术成功地应用雷达车调平系统中,对于提升雷达机动性能具有重要的意义。
本文所介绍的电液比例阀控液压自动调平系统,采用了比例多路阀控制,多个调平支腿执行元件可以实现不受负载约束的无级调速控制,这是实现高效调平性能的关键。
1 调平系统特点某雷达天线车自重45 t,要求工作状态时天线水平基准小于3’,整车展开并完成调平的时间控制在2 min以内。
雷达车采用四点支撑实现系统调平的方式。
系统设计采用液压作为动力源,由电机一液压泵驱动,通过液压控制阀控制四条液压支腿的升降运动,将天线车由运输状态转架为正常工作状态,并保持水平状态的稳定。
要实现本系统的功能有两个关键技术需要解决:一是调平支腿的性能问题;二是驱动控制方式和控制策略问题。
本系统方案摒弃了常规的开关阀控设计,采用性能更为先进的电液比例控制技术,提升液压系统执行机构的控制性能,实现多个执行元件同时相互独立地在不同的速度和压力下工作,使得调平控制更为灵活,实现柔性的控制策略;功能上解决了落地检测的问题,实现了一键式调平的全自动功能,有效地保证了调平时间指标的实现。
调平支腿采用带抱闸制动功能的液压马达驱动滚珠丝杆的结构设计,机械效率高,承载能力强,满足了大吨位雷达车的使用要求;通过专门研制的液压马达制动控制阀集成模块对调平支腿实施驱动和控制。
该设计方案在满足系统要求的前提下,具备了技术的先进性,同时具有很好的通用性和可扩展性。
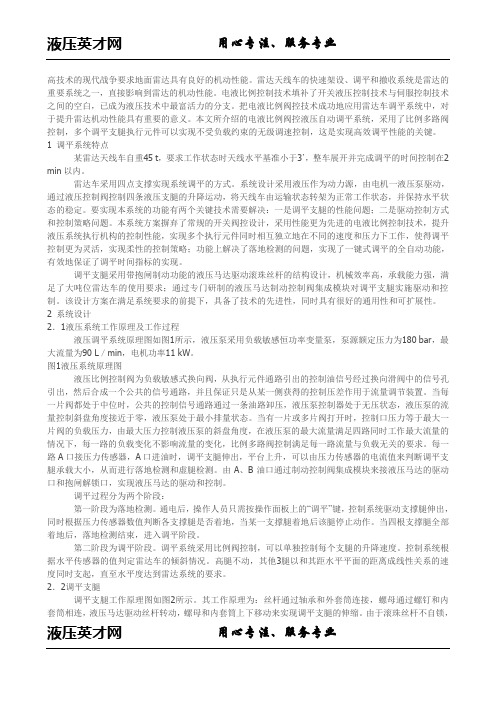
2 系统设计2.1液压系统工作原理及工作过程液压调平系统原理图如图1所示,液压泵采用负载敏感恒功率变量泵,泵源额定压力为180 bar,最大流量为90 L/min,电机功率11 kW。
图1液压系统原理图液压比例控制阀为负载敏感式换向阀,从执行元件通路引出的控制油信号经过换向滑阀中的信号孔引出,然后合成一个公共的信号通路,并且保证只是从某一侧获得的控制压差作用于流量调节装置。
泵控马达速度伺服系统建模与仿真分析

S H E N W ), CUI Xia2
(1. Shanghai Ocean U n iv e rs ity ,C ollege o f E n g in e e rin g ,Shanghai 2 0 1 3 0 6 ,C h in a ;
摘 要 :泵控闭式系统工作效率高且油液不易被污染,因此大功率伺服系统都乐于采用此种控制方式。特别是电液比例变量泵和定
量马达组成的闭式液压控制系统,在泵控闭式系统中最为常见。该文运用MATLAB软 件 Srniul m k 模 块 和 SrniSCape模块,建立了交流
电动机驱动的电液比例变量泵控定量马达恒速控制系统时域仿真模型,取得了较好的仿真效果。通过仿真验证了泵马达流量耦合特
domain model is
desirable.By sim ulation,the influence on
constant speed control
performance
by f
hydraulic m otor,load disturbance and variable pump in p u t speed disturbance is ve rified . The influence on model sim plification of electro
恒转速控制是泵控马达速度伺服的一项重要内 容 。要实现马达的恒速控制,通常认为主要需克服三 方面的不利因素。首先是泵控马达闭式系统流量耦合
收 稿 日 期 :2017-12-20 作 者 简 介 :沈伟(1973- ) ,男 ,江苏常州人,讲师,博士,从事控制 理论与控制技术领域的科学研究。
基于SIMULINK泵控马达调速系统建模仿真

基于SIMULINK 泵控马达调速系统建模仿真摘要:依据泵控马达工作原理,建立了变量泵控马达数学模型,利用MATLAB/simulink 并对其进行仿真分析,分别考察系统有无PID 控制,负载的不同输入时刻,负载的输入大小对系统响应的影响,并且在MATLAB 命令窗口绘出了以上不同参数的对比图。
关键词:泵控马达; MATLAB/simulink; PID 控制;负载引 言泵控马达容积调速系统主要由电液比例变量泵和定量液压马达组成,其采用改变液压泵的排量来实现速度调节的,从原理上讲没有节流,溢流和压力损失,并且具有效率高、产生的热量少、调速范围大、输出转矩恒定的优点,因而被广泛应用到大功率或对发热有严格限制的液压系统中。
本文从建立泵控容积调速系统的数学模型出发,利用MATLAB/SIMULINK 对其进行仿真,来研究泵控马达的动态特性和影响因素,进而制定更好的控制策略,以达到较好控制液压马达输出转速的目的。
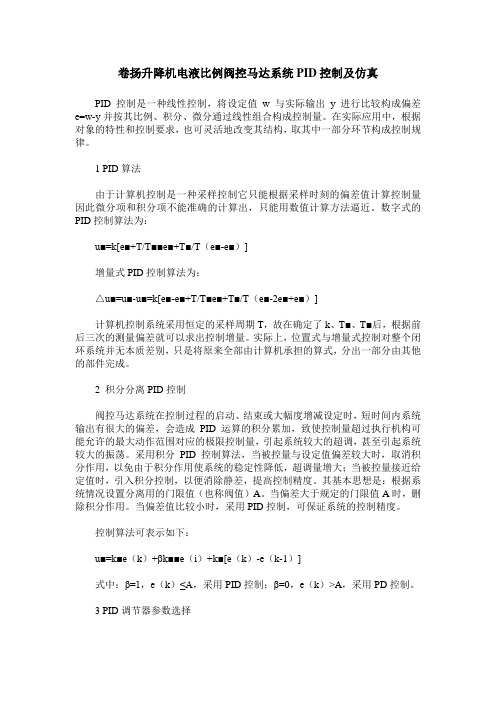
图1 变量泵定量马达原理图1 变量泵定量马达容积调速系统建模变量泵一定量马达液压容积调速系统的原理如图所示。
变量泵的输入转速pn 、马达的排量m D 一定的情况下,通过改变变量泵的排量pD ,达到调节马达输出转速m n 的目的。
为简化分析,参考文献等作如下假设:(1)泵和马达的泄漏为层流,忽略低压腔壳体的外泄漏,泵和马达的壳体回油压力为大气压; (2)泵和马达组成的两个腔室的总容积相等,每个腔室内油液的温度和体积弹性模量均为常数,且压力均匀相等;(3)液压泵和液压马达之间的连接管道很短,可以1忽略管道中的压力损失、流体质量效应和管道动态忽略不计;2(4)补油系统的压力、流量没有滞后,忽略负载瞬变的影响,认为补油压力为常数,为工作时低压油腔的压力,仅高压腔压力发生变化;(5)马达和负载之间的连接结构刚度很大,忽略结构柔度的影响;(6)输入信号较小,不发生压力饱和现象。
管道中不产生压力冲击,压力超过安全阀压力。
卷扬升降机电液比例阀控马达系统PID控制及仿真
卷扬升降机电液比例阀控马达系统PID控制及仿真PID控制是一种线性控制,将设定值w与实际输出y进行比较构成偏差e=w-y并按其比例、积分、微分通过线性组合构成控制量。
在实际应用中,根据对象的特性和控制要求,也可灵活地改变其结构,取其中一部分环节构成控制规律。
1 PID算法由于计算机控制是一种采样控制它只能根据采样时刻的偏差值计算控制量因此微分项和积分项不能准确的计算出,只能用数值计算方法逼近。
数字式的PID控制算法为:u■=k[e■+T/T■■e■+T■/T(e■-e■)]增量式PID控制算法为:△u■=u■-u■=k[e■-e■+T/T■e■+T■/T(e■-2e■+e■)]计算机控制系统采用恒定的采样周期T,故在确定了k、T■、T■后,根据前后三次的测量偏差就可以求出控制增量。
实际上,位置式与增量式控制对整个闭环系统并无本质差别,只是将原来全部由计算机承担的算式,分出一部分由其他的部件完成。
2 积分分离PID控制阀控马达系统在控制过程的启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分累加,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡。
采用积分PID控制算法,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统的稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度。
其基本思想是:根据系统情况设置分离用的门限值(也称阀值)A。
当偏差大于规定的门限值A时,删除积分作用。
当偏差值比较小时,采用PID控制,可保证系统的控制精度。
控制算法可表示如下:u■=k■e(k)+βk■■e(i)+k■[e(k)-e(k-1)]式中:β=1,e(k)≤A,采用PID控制;β=0,e(k)>A,采用PD控制。
3 PID调节器参数选择选择调节器的参数,必须根据工程的具体问题来考虑。
泵控液压马达系统模型建立及试验验证

泵控液压马达系统模型建立及试验验证康晶晶;郭姗姗;闫诚诚;李鲜花;肖茂华【摘要】泵控液压马达系统对实现液压机械无级变速箱性能的控制非常重要,文章建立了泵控液压马达系统的模型,基于已搭建的泵控液压马达系统,研究泵控液压马达系统的传动比和比例电磁铁通电电压的关系,检验仿真模型的正确性,更好的了解系统性能,对实际变速箱的设计起到非常重要的作用.【期刊名称】《南方农机》【年(卷),期】2018(049)002【总页数】1页(P30)【关键词】泵控液压马达系统;建模试验;变速箱性能【作者】康晶晶;郭姗姗;闫诚诚;李鲜花;肖茂华【作者单位】南京农业大学工学院,江苏南京 210031;南京农业大学工学院,江苏南京 210031;南京农业大学工学院,江苏南京 210031;南京农业大学工学院,江苏南京 210031;南京农业大学工学院,江苏南京 210031【正文语种】中文【中图分类】TH137.51泵控液压马达系统是液压机械无级变速箱液压传动环节的重要组成部分,主要由马达和泵组成,液压马达的输出转速受液压泵的溢流阀的工作点变化的影响[1],通过控制变量泵排量来控制液压功率流速率,使变速箱实现段位无级调速。
本试验基于MATLAB自主开发控制程序,与单片机接口连接控制变量泵比例电磁通电情况,进而控制变速箱,验证建立的泵控液压马达系统调速特性的正确性。
1 泵控液压马达系统模型建立在signal,control库中选取信号源signal模块,采用连续信号代替比例电磁铁控制变量泵斜盘旋转,实现供油方向和排量变化[2]。
再添加相应的辅助元件,最终得到如下的泵控液压马达系统仿真模型如图1所示。
图1 变泵控液压马达系统仿真模型2 泵控液压马达系统实验验证2.1 泵控液压马达调速试验根据油路实物图,进行泵-马达液压系统调速试验。
主要试验步骤如下:①从发动机仪表盘的控制钥匙启动发动机,使其处于空挡怠速状态(750r/min)下空转15min;②通过控制系统显示屏幕打开程序控制系统,将变速箱切换至HM1段,观察变速箱的运转稳定情况;③将发动机的转速稳定控制在750r/min。
基于SimulationX的泵控马达调速系统建模仿真
基于SimulationX的泵控马达调速系统建模仿真高翔;胡亚男【摘要】为了深入研究液压机械无级变速器中液压系统的特性,利用SimulationX 建立了液压泵控马达系统及其排量伺服机构的物理模型,对整个系统的动态特性和效率进行了仿真研究,并应用PID控制.仿真结果表明系统的控制性能有了明显的改善,能够使系统的抗负载干扰能力提高,实现马达恒转速控制;另外,研究了排量比、输入转速和外负载这三个参数对马达输出效率的影响.【期刊名称】《液压与气动》【年(卷),期】2015(000)010【总页数】5页(P56-60)【关键词】泵控马达;SimulationX;PID控制;效率【作者】高翔;胡亚男【作者单位】江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013【正文语种】中文【中图分类】TH137引言国外农用大功率拖拉机为了提高作业效率,降低劳动强度,适应工作负载频繁变化,多采用液压机械无级变速器(HMCVT)。
液压机械无级变速器采用的是液压功率流与机械功率流组合传递的双功率流无级变速传动形式,既能实现较高的传动效率,又能实现无级变速,同时兼顾了液压系统良好的控制性[1]。
HMCVT的传动效率是由机械效率和液压效率共同决定的,一般认为机械效率变化不大,则液压传动系统的效率变化影响整个传动系统的效率,研究液压系统的调速特性和效率对液压机械无级变速传动系统的性能研究有重要意义[2]。
目前已有的一些研究针对变量泵-定量马达容积调速回路的特性,也有针对伺服变量机构的动态特性[3-6],但是对变量泵-马达系统与伺服变量机构结合进行的分析和研究很少见。
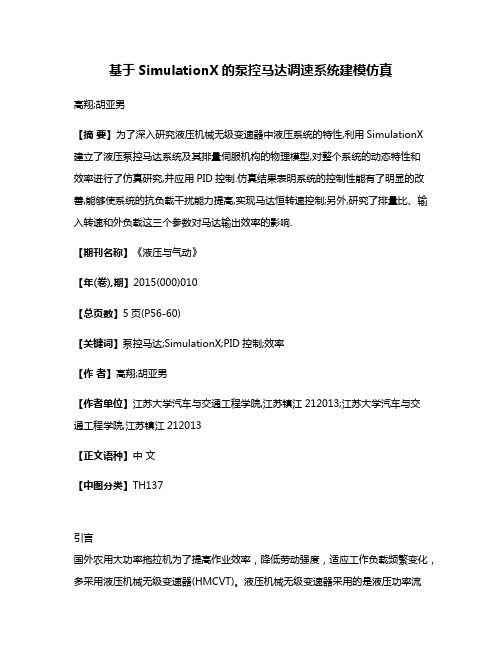
由于变量泵输出流量的调节是由液压伺服机构来完成的,研究由液压伺服机构控制的变量泵-定量马达容积调速系统。
1 液压泵控马达调速系统的工作原理液压泵控马达调速系统主要是由由变量泵-定量马达系统和伺服变量机构组成的,如图1所示。
利用MATLAB实现变量泵定量马达调速系统的动态仿真_张红俊

利用M AT LAB 实现变量泵定量马达调速系统的动态仿真张红俊1,李增玲2(1.山西煤炭职业技术学院,山西太原030031;2.山东省东营市东营区试验中学,山东东营257000)摘 要:通过对变量泵定量马达容积调速系统的数学建模和利用M AT L AB 进行动态仿真,直观地分析了系统的动态特性以及影响特性的因素和影响规律,仿真结果与系统的理论分析相符合。
关键词:容积调速系统;动态特性;动态仿真中图分类号:T P393 文献标识码:A 文章编号:1008-8881(2004)01-0082-02工程实际中广泛利用变量泵定量马达调速系统,尤其是大型工业机械。
系统回路的动态分析是系统设计及生产实际的需要,利用M AT L AB 这一强大的工程工具进行计算机动态特性的分析是十分有效和有实际意义的。
一、液压调速系统原理变量泵定量马达的调速系统如图1。
图1 容积调速液压系统原理通过改变泵的每转排量q p 来调节马达的转速n m 。
n m =q p n p q m(1)式中:n p )))变量泵的转速;q m )))定量马达的每转排量。
二、系统数学模型的建立为了分析方便,作如下假设:液压泵的吸油口和液压马达的回油口油压力为零;油液的粘性不变;液压泵和液压马达的泄漏油流为层流;不考虑油液的液阻和液感及管路中的动态过程,仅考虑液容;不考虑液压泵的脉动性。
1.流量连续性方程n p q p -(c p +c m )p-n m q m =v k dpdt(2)式中:n p ,n m )))泵和马达的转速;v )))压力油腔总容积;q p ,q m )))泵和马达的排量;p )))压力油腔压力;k )))油液体积弹性模量;c p ,c m )))泵和马达的泄漏系数。
2.液压马达转矩平衡方程q m p=Jdn mdt+Bn m +T l (3)式中:J )))马达及负载折算到马达轴上的等效转动惯量;B )))粘性阻尼系数;T 1)))负载力矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6结论
本文使用传递函数法建立了电液比例变量泵控 马达系统的数学模型。通过系统的Bode图发现原系 统的控制性能很差,所以采用PID控制对系统进行
GAO Xiang—-yu SU Dong—-hai ·+-+-—卜-+-+-+---6--—f-—+-·卜——卜—+—+·+·+-+·+--4--+-1-’·+-+-+-+-。。卜-‘卜-。。卜
我国首座大型海上风电场建设进入关键阶段
东海大桥风电场首台3兆瓦风机安装成功
本报讯(记者张欣平)国家海上风电示小组项 目及上海市重大工程——东海大桥100兆瓦海上风 电场首台3兆瓦风机,日前整体安装成功,标志着我 国第一座大型海上风电场建设进入了关键阶段。
2‰
(I)
图l系统液压原理图
系统由变量泵l(力士乐A4VSGl25E02)、马达 2(力士乐A6VMl07EP2)、单向阀3、补油泵4、溢流 阀5、控制泵6、溢流阀7、单向阀8、比例阀9(力士 乐4WRA6)和对称双作用液压缸10组成。在此系统 中,液压泵1既是动力元件又是主要控制元件。通 过阀9和液压缸10调节泵1排量的大小和方向, 就可改变马达2输出速度的大小和方向。马达2驱 动的负载为力士乐A4VSGl 25DSl二次控制元件。 系统的控制原理如图2所示。
Tc=2 pi/wc
%计算振荡周期瓦值
kp=0.6kc
%计算民值
Ti=0.5Tc
%计算兀值
Td=0.125Tc Ki=Kp/Ti Kd=KpTd
%计算死值 %计算墨值 %计算‰值
5控制系统仿真
用MATLAB软件的Simulink对系统仿真,仿型 如图5所示。仿真开始,输入140rad/s的转速控制阶 跃信号,0.6s后输入600 N·m的转矩干扰阶跃信 号。仿真时间为l s,精度为lxl0。7。
图5系统的时域响应曲线
校正并利用临界增益法来整定PID参数。最后使用 MATLAB软件对系统进行了仿真,通过仿真发现 PID控制算法使系统的性能得到很大改善,并使系 统达到令人满意的控制性能。
参考文献 …李寿刚.液压传动【M】.北京:北京理工大学出版社,1994 f2】路甬祥,胡大宏.电液比例控制技术【M】.北京:机械丁业出
盟=Kf
(6)
0m(S)
式中,反馈系数墨的取值为0.025V·grad。 2.6比例放大器的建模分析
此比例放大器频宽远大于比例阀的频宽,与液
压系统相比有着很高的响应频率,因此可将比例放
大器增益K。(取值为0.2州)视为比例放大器输出
电流I(s)与系统偏差电压E(s)之比:
I(s),
(7)
E(s)----,/ka
中图分类号:THl37.3
文献标识码:A
本文研究的是电液比例变量泵控定量马达调 速系统。该系统属于容积调速,通过单独调节液压 泵的变排量机构来改变泵的输出排量进行调速系 统,其效率远高于节流调速回路,但该系统的变量 机构造价较高、结构复杂,故多用于功率较大的场 合【11。由于采用电液比例控制,硬件通用性强,对不 同工况只需改写控制目标函数即可,且控制比较精 确,便于计算机控制。
本文链接:/Periodical_ltcdykz200903003.aspx
西安:长安大学,2004 181薛定宁控制系统计算机辅助设计一MATLAB语言与应用
[MJ(第2版).北京:清华大学出版社,2006
Modeling and Simulation for Electro—hydraulic Proportional Pump Control Motor System
.225
^a粤v。蛤芒厶
t●…●¨●● ●●●…●¨●
……¨¨¨“r、\■’--●L-●…...I.·.‘●·●……....●¨
IOiFr娜禽(r蒯3 .270
1 0a
10‘
图4系统Bode图
在PID控制算法中,存在着比例、积分、微分三
种控制作用。PID控制的传递函数为:
GPID=Kp+K/s+Kds
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
高翔宇, 苏东海, GAO Xiang-yu, SU Dong-hai 沈阳工业大学机械工程学院,辽宁沈阳,110178
流体传动与控制 FLUICL POWER TRANSMISSION AND CONTROL 2009(3)
参考文献(8条) 1.薛定宇 控制系统计算机辅助设计-MATLAB语言与应用 2006 2.李婷婷 电液比例变量泵-马达恒速控制系统的研究 2004 3.路甫祥 液压气动系统设计手册 2002 4.李寿刚 液压传动 1994 5.王占林 近代液压控制 1997 6.卢长庚 液压控制系统的分析与设计 1991 7.王春行 液压控制系统 1995 8.路甬祥;胡大宏 电液比例控制技术 1988
·…i·r’h
●
L、…●.¨.._●.●●…●¨●.…●.¨●●●●……¨¨._.●
.135
●●●‘●●I●●
●…●I.‘.● ●I^..●'…¨¨●●…¨¨
··…■u■‘-^ J^u■~圳■ou~·^¨■■- .'∞ ··●·●:●-}{…}冀■H.}·.‘●· {……:I娜●^0●I.^●.●…·…..¨;.J●“i0●_Vt●.●●.●II….●.;…J.:¨●ou
万方数据
2009年5月
高翔宇等:比例变量泵控马达系统的建模与仿真
为积分环节和比例环节的积141。 2.3泵的活塞一斜盘倾角模型【5】
液压缸10的活塞位移x,(s)与变量泵1的斜盘 倾角叹s)之比为变量泵斜盘倾角系数‰:
2.7系统的数学模型 由以上各部分的模,可以得到泵控马达系统的
数学模型方框图如图3所示。 系统的闭环传递函数为:
马达2角速度Ore(S)对作用在马达轴上的外负载 转矩TL(S)的传递函数为:
酱T)L(S:譬s2 2掣6 ㈣r 7 . 叽cEJh
式中,ct为总泄漏系数(5.0x10—2 m讯·s);V。为 泵和马达工作腔以及连接管道的总容积(5.9x104 m3)。 2.5速度传感器的建模分析同
速度传感器将系统输出信号0re(S)转变成电压信 号Uf(s)反馈给控制器,其动态响应很高,可视为一阶 比例环节:
1泵控马达系统原理 系统的液压原理如图1所示。
文章编号:1672—8904(2009)03—0010—003
冁 变量泵 H定量马达
鬻占 ● 控制器卜———一转速传感器 I输入
图2系统控制原理图
9…1 电液比例方向阀4WRA6建模[21 阀芯位移量X,(s)对比例电磁铁线圈通过电流,
(s)的传递函数为:
2建立系统数学模型
收稿日期:2008—12—29 作者简介:高翔宇Q983一)男,辽宁省互房店市,沈阳工业大学在读 硕士研究生,主耍研究对象为液压传动与控制。
式中,‰和氲分别为液压固有频率和阻尼系
数,Kh为阀的增益系数(值为0.25 1献)。
由于比例阀的谐振频率远大于变量泵一定量马
达环节的谐振频率,所以比例阀的动态可以忽略,其 模型可用‰表示【II。 2.2阀控液压缸建模131
液压缸10的活塞位移x“s)对阀9的阀芯位移 Xv(s)的传递函数为:
鼠
A
K
X“s)一
≈石
X“s) s8【悟瓦鲁+i州8+)lJ
式中,‰和£分别为液压固有频率和阻尼近流量增益(0.1783 m瑰)。
因比例阀和液压缸的谐振频率都在100Hz以 上,而变量泵一定量马达环节的谐振频率约0.78Hz, 所以前两者的动态可以忽略”I,阀控缸环节可简化
提供的margin0函数求得系统的幅值裕度疋和剪切 频率toe,然后根据Z—N调整法计算出PID参数,最
后求得K。值为0.0268,Ki值为0.6825,Kd值为 0.0002631。其程序如下:
sys=tf(1 0332800,【l,72,6400,O】);
[kc,b,we,d]=margin(sys)
(9)
式中,K。为比例增益;K为可调积分系数;Ka为
可调微分系数。式(9)另一等价形式为:
㈨=球∽+i1£e…一r+rd0(t)] (10)
式中,Z=K群;Td=K./K妒
万方数据
12
溢体秸动与控戋吐
2009年第3期
4 PID参数的整定唧
由于系统的开环传递函数己知,所以利用临界 增益法来整定PID参数。首先使用MATLAB软件所
U(s)
式中,Ku=墅塑;Kw=KK。 AD。
图3系统数学模型方框图
3控制系统设计
用MATLAB软件绘制该系统的Bode图,如图4 所示。从图中可以看出系统的剪切频率小于相位的 交界频率,所以系统不稳定,需要校正,本文使用 PID校正。
^m丐v囊摹暮鼍
’"^,-州,^^r-州t^_ …t’f^^r。叩 .∞
第3期憩第34期) 2009年5月
意体秸动与控副
fluid Power Transmission and Control
No.3(Serial No.34) May.2009
比例变量泵控马达系统的建模与仿真
高翔字苏东海
(沈阳工业大学机械丁程学院辽宁沈阳110178)
摘要:建立了电液比例变量泵控马达系统的数学模型,并使用MATLAB软件进行了控制系统的设计与性能仿真;应 用r PID控制算法,使系统得到了令人满意的控制性能。 关键词:电液比例控制;泵控马达;PID控制;建模与仿真
本文读者也读过(7条) 1. 高翔宇.苏东海.GAO Xiang-yu.SU Dong-hai 比例变量泵控马达系统的PID控制与仿真[期刊论文]-装备制造技术 2009(2) 2. 高翔宇.苏东海.GAO Xiang-yu.SU Dong-hai 比例变量泵控马达系统的建模与仿真[期刊论文]-液压气动与密封 2009,29(4) 3. 比例变量泵控马达系统的建模与仿真[期刊论文]-机械工程与自动化2009(5) 4. 张红俊.李增玲.Zhang hong-jun.Li zeng-ling 利用MATLAB实现变量泵定量马达调速系统的动态仿真[期刊论文 ]-山西煤炭管理干部学院学报2004,17(1) 5. 高翔宇.苏东海.Gao Xiangyu.Su Donghai 比例变量泵控马达系统的PID控制与仿真[期刊论文]-中国重型装备 2009(3) 6. 乔桂玲.孟庆波.张文明.冯雅丽.QIAO Gui-ling.MENG Qing-bo.ZHANG Wen-ming.FENG Ya-li 基于MATLAB的深海 行走机构液压系统建模及仿真研究[期刊论文]-煤矿机械2009,30(4) 7. 万丽荣.赵胜刚.沈潇.李庆国.WAN Li-rong.ZHAO Sheng-gang.SHEN Xiao.LI Qing-guo 基于MATLAB/SIMULINK的 变量泵变量马达调速系统动态仿真[期刊论文]-煤矿机械2007,28(2)