第十章机械振动和电磁振荡振动
11_机械振动和电磁振荡
1 ω v= = T 2π
4、角频率(angular frequency): 物体在 π秒内所作 、角频率( ): 物体在2 的完全运动的次数。 的完全运动的次数。
2π ω= = 2πv T
对于弹簧振子, 对于弹簧振子,因有 ω = 弹簧振子
k m ,得:
m T = 2π , k
k ν = 2π m
′ ′ φ 0 = ϕ + π / 2 x = A sin( ω t + φ 0 )
简谐振动的运动学特征: 简谐振动的运动学特征: 物体的加速度与位移成正比而方向相反, 物体的加速度与位移成正比而方向相反 , 物 体的位移按余弦规律变化。 体的位移按余弦规律变化。
速度
dx v= = −ω A sin( ω t + φ 0 ) dt
速度、加速度的旋转矢量表示法: 速度、加速度的旋转矢量表示法:
v
a
vx
ax
v, a 沿X 轴的投
影为简谐运动的速度、 影为简谐运动的速度、 加速度表达式: 加速度表达式:
M
X
ωt + φ0
v x = − ω A sin (ω t + φ 0 )
a x = − ω A cos (ω t + φ 0 )
x = A cos(ωt + φ0 )
v = −vm sin(ωt + φ0 ) = vm cos(ωt + φ0 + π 2)
a = −am cos(ωt + φ0 ) = am cos(ωt + φ0 + π )
速度的相位比位移的相位超前 π 2 ,加速度的相 位比位移的相位超前 π。
三、谐振动的旋转矢量图示法
理论力学 第十章振动

k2
k1
δ st
r F1
k eq = k1 + k 2
δ st r
r mg
keq k1 + k 2 = m m
m
r F2
mg = k eqδ st
keq称为等效弹簧刚性系数 并联系统的固有频率为
mg k2
ωn =
当两个弹簧并联时,其等效弹簧刚度等于两个弹簧刚度的和。 这一结论也可以推广到多个弹簧并联的情形。
O
δ st
x
r F r P
则解为:
x = A sin(ω nt + θ )
表明:无阻尼自由振动是简谐振动。 其运动图线为:
x
A
x
x0
θ ωn
O
t
t+T
x
2.无阻尼自由振动的特点 无阻尼自由振动的特点
(1)固有频率 )
无阻尼自由振动是简谐振动,是一种周期振动,任何瞬时t, 无阻尼自由振动是简谐振动,是一种周期振动,任何瞬时 ,其 运动规律x(t)总可以写为: 运动规律 ( )总可以写为: x(t)= x(t+T) () ( ) T为常数,称为周期,单位符号为s。 为常数, 周期, 符号为 为常数 称为周期 单位符号 。 这种振动经过时间T后又重复原来的运动 后又重复原来的运动。 这种振动经过时间 后又重复原来的运动。 考虑无阻尼自由振动微分方程 考虑无阻尼自由振动微分方程
r F r P
x
两个根为: r1 = +iω n 方程解表示为:
r2 = −iω n
x = C1 cos ω nt + C2 sin ω nt
x = C1 cos ω nt + C2 sin ω nt
机械振动与波动

机械振动与波动机械振动与波动是物理学中的重要概念和研究领域。
本文将从机械振动的基本原理、波动的特性以及它们在生活中的应用等方面展开论述。
一、机械振动机械振动是指物体周围环境中某个物理量周期性地变化。
在机械振动中,物体会围绕平衡位置做前后或上下的周期性振动。
机械振动的基本元素有质点、弹簧和阻尼器。
1. 质点振动在质点振动中,一个物体被假设成一个质点,不考虑其大小和形状。
质点在线性回复力作用下,在某个平衡位置附近做简谐运动。
质点振动的周期T和频率f与质点的质量m和弹簧的劲度系数k有关,分别由公式T=2π√(m/k)和f=1/T得出。
2. 弹簧振动弹簧振动是机械振动中常见的一种形式。
当弹簧受到外力拉伸或压缩时,会发生弹性畸变,当外力撤离时,弹簧会恢复原状。
弹簧振动是由弹性势能和动能之间的转换所驱动的周期性运动。
3. 阻尼振动在实际的振动系统中,会存在阻力的存在,使振动系统减弱并最终停止。
这种减弱称为阻尼。
根据阻尼的不同程度,振动系统可以分为无阻尼振动、欠阻尼振动和过阻尼振动三种情况。
二、波动波动是指物理量在空间和时间上周期性地传播和变化。
波动可以分为机械波和非机械波两种类型。
1. 机械波机械波是指需要介质传播的波动现象。
根据波动传播的方向,机械波可分为横波和纵波。
横波传播方向垂直于波动方向,如水波;纵波传播方向与波动方向平行,如声波。
机械波的传播速度与介质的性质有关。
2. 非机械波非机械波是指不需要介质传播的波动现象。
电磁波和光波是两种常见的非机械波。
非机械波可以在真空中传播,并且传播速度快,通常以光速传播。
三、机械振动与波动的应用机械振动与波动在生活中有许多实际应用。
下面将列举其中几个。
1. 音乐乐器音乐乐器的演奏就是利用了机械振动和波动的原理。
例如,弹奏吉他时琴弦的振动产生声波,通过空气传播到人的耳朵,使人产生听觉感受。
2. 地震测量地震测量利用了机械振动和波动的原理。
通过监测地震波在地壳中的传播速度和路径,可以判断地震的强度和震源位置,为地震预测和防灾提供帮助。
机械振动和电磁振荡

010203定义稳态受迫振动和非稳态受迫振动。
类型应用振荡频率电感线圈振荡的频率与电感量、电阻和电容有关,通过调节这些参数可以改变振荡频率。
振荡原理电感线圈中,当电流发生变化时,会产生感应电动势来阻碍电流的变化,从而产生振荡。
应用振荡电路是许多电子设备中的重要组成部分,如信号发生器、无线电等。
电感线圈振荡电磁场振荡电磁波传播电磁波传播原理电磁波的特性应用单摆模型描述物体在平衡位置附近往复运动的模型,可以用于描述机械振动和某些电磁振荡。
单摆的周期公式是 T =2π√(L/g),其中L是悬摆的长度,g是重力加速度。
在不同的星球或不同的重力场中,单摆的周期会发生变化,因此可以用来测量重力场的变化。
弹簧质量模型弹簧质量模型的振动方程是 m(d^2x/dt^2) = -kx,其中m 是质量块的质量,k是弹簧的弹性系数。
解这个方程可以得到振动的频率和振幅,从而可以描述物体的振动特性。
描述一个质量块在弹性力作用下运动的模型,可以用于描述机械振动和某些电磁振荡。
电感线圈模型描述电感线圈在电磁场中运动的模型,可以用于描述某些电磁振荡。
电感线圈的动态方程是d^2i/dt^2 + R(di/dt) + (1/L) *(Li) = 0,其中i是电流,R是电阻,L是电感。
解这个方程可以得到电流的时间变化,从而可以描述电磁振荡的特性。
简谐振动的数学公式简谐振动的数学公式简谐振动的特点简谐振动的描述阻尼振动的数学公式阻尼振动的描述阻尼振动的数学公式阻尼振动的特点03受迫振动的特点受迫振动的数学公式01受迫振动的描述02受迫振动的数学公式1电感线圈振荡的数学公式23电感线圈在电流变化时会产生感应电动势,从而产生振荡。
电感线圈振荡的描述i=Icos(ωt+φ),其中I为电流幅度,ω为角频率,φ为初相位。
电感线圈振荡的数学公式电感线圈的振荡频率由电路阻抗决定,与电源频率无关。
电感线圈振荡的特点机械振动在工程中的应用机器运转机械振动可以提高机器的运转效率和精度,如振动筛、振动电机等。
程守洙《普通物理学》(第5版)辅导系列-课后习题-第10章 机械振动和电磁振荡【圣才出品】
解得:
。
(2)当物体跳离平板时,物体受平板支持力为零。由(1)的结果可知,当振幅增大
5 / 27
圣才电子书
十万种考研考证电子书、题库视频学习平 台
时物体将于最高处跳离平板,即 FN1=0,所以有
,解得
。
10-6
图 10-5 所示的提升运输设备,重物的质量为 1.5×104 kg,当重物以速度
圣才电子书
十万种考研考证电子书、题库视频学习平 台
第 10 章 机械振动和电磁振荡
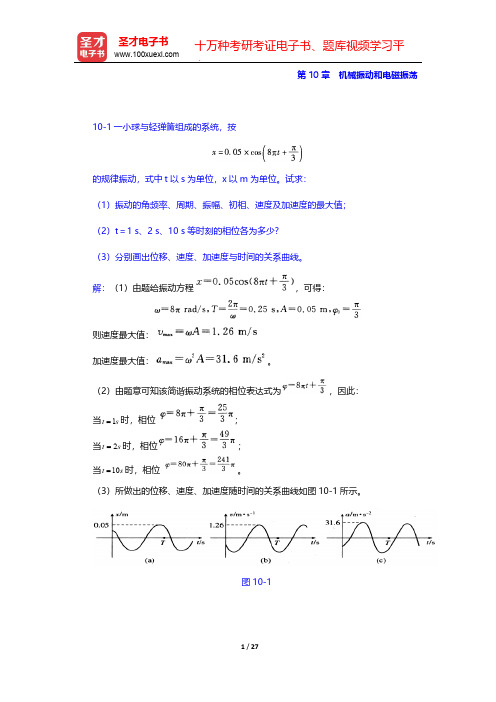
10-1 一小球与轻弹簧组成的系统,按
的规律振动,式中 t 以 s 为单位,x 以 m 为单位。试求: (1)振动的角频率、周期、振幅、初相、速度及加速度的最大值; (2)t=1 s、2 s、10 s 等时刻的相位各为多少? (3)分别画出位移、速度、加速度与时间的关系曲线。
。 物体所受力大小为:
,又
。 ,故
方向与位移的方向相反,即指向平衡位置。
(3)由于
,因此有
,解得
位置运动到 x=12 cm 处所需最少时间为: (4)由简谐运动物体的运动学方程可知,在 x 12cm 处
,又 。
,因此由起始
物体的速度为:
物体的动能为: 物体的势能为: 所以谐振动系统的机械能为:
。
4 / 27
=15 m/min 匀速下降时,机器发生故障,钢丝绳突然被轧住。此时,钢丝绳相当于劲
度系数 k=5.78×106 N/m 的弹簧。求因重物的振动而引起钢丝绳内的最大张力。
图 10-5
解:根据题意可知,机器发生故障时,重物与钢丝绳组成简谐振动系统,则有:
简谐运动系统的固有频率为: 谐振动速率的最大值为: 谐振动的振幅为: 重物在最低处时,受钢丝绳的拉力 T 和重力 mg 的合力方向向上,此时的拉力有最大
大学物理《普通物理学简明教程》10-4 电磁振荡

的相位超前 ,如下图所示: 2
I0 Q0
而且电荷和电流的振荡频率相同,电流的相位比电荷
o
t
上页 下页 返回 退出
设t 时刻电容器极板上电量为q,相应的电场能量为: 2 Q0 q2 We cos 2 (t 0 ) 2C 2C
此刻电流为i,则线圈中的磁场能量为: 2 1 2 L 2Q0 Wm Li sin 2 (t 0 ) 2 2 将电场和磁场能量相加,并利用 1 LC,得 2 Q0 W We Wm 2C 上式表明,尽管电能和磁能均随时间变化,但 总能量守恒。
§10-4 电磁振荡
一、LC 电路的振荡
电路中电压和电流的周期性变化称为电磁振荡。
S
C
L
LC振荡电路
向左合上开关K,使电源给电容器充电,然后 将开关K 接通LC 回路,出现电磁振荡效应。
上页 下页 返回 退出
LC电路电磁振荡过程
上页 下页 返回 退出
LC 回路与弹簧振子振动的类比
k
m
Q
A
(a) t 0
1/C
q2/2C Li2/2
上页 下页 返回 退出
思考题和习题
P244-245 6-14, 6-17, 6-23, 6-26。
上页 下页 返回 退出
C
Q
L
I
(b) t T 4
Q
A
(c ) t T 2
Q
上页 下页 返回 退出
LC 回路与弹簧振子振动的类比
(d ) t 3T 4
Q
A
(e) t T
Q
在 LC 电路中,电荷与电流(电场能量与磁场能 量)随时间作周期性变化,且不断相互转换。若电路 中无能量损耗,这种变化将一直持续下去,这种现象 称为无阻尼自由振荡。
机械振动知识

0 — 固有频率, — 阻尼因子
则运动方程写为
d2x dx 2 2 0 x 0 dt dt 2
第十章 机械振动
与微分方程对应的特征方程为
2 2 02 0
特征根为
2 02
1. 阻尼振动
若阻尼较小,即 2 < 02 则
j 02 2 j
1 2 1 2 2 kx kA cos ( t 0 ) 2 2
Ep
系统的动能和势能都随时间周期变化,当位移最大时,势 能达到最大,动能为零;过平衡位置时,动能最大,势能为 零。动能和势能的幅值相等。
第十章 机械振动
系统的总能量
1 2 1 E E K E p kA m 2 A 2 2 2
T
0
第十章 机械振动
§10-2 阻尼振动
在恢复力和阻力共同作用下的振动为阻尼振动,系统的 能逐渐衰减,振幅不断减小,最终停止。
当运动速度不太大时,阻力与速度成正比
f dx dt
—阻尼系数
运动方程
dx d2 x kx m 2 dt dt
k 令 0 , 2 m m
的相差为 2n。
相位概念的重要性还在于比较两个振动的步调: = 2n,两个振动完全同步调,称这两个振动同相; = 2n +1,两个振动完全反步调,称这两个振动反相。
第十章 机械振动
四. 简谐振动的旋转矢量表示
旋转矢量的一个空间特定位置,代表振动的一个特定状 态。例如:
过平衡点向负方向运动
第十章 机械振动
任一时刻, L 上的自感电动势和 C 上的电压分别为
L L
dI dt UC q C
高二物理电磁振荡整理知识点

高二物理电磁振荡整理知识点电磁振荡是高中物理中重要的内容之一,也是电磁学的基础。
在本文中,我们将对高二物理电磁振荡的知识点进行整理和总结,以供学生复习和巩固。
1. 电磁场的概念电磁场是指电荷或电流所产生的空间中存在的物理量,它包括电场和磁场两部分。
电场是由电荷产生的作用力,在空间中可以用电场线表示;磁场是由电流产生的作用力,在空间中可以用磁感线表示。
电磁场的性质主要有强度、方向和分布等。
2. 电磁振荡的基本概念电磁振荡是指在电磁场中,电磁波或者电磁信号以一定的频率在空间中传播的现象。
其基本特点包括振幅、频率、周期和波长等。
电磁振荡可以通过电磁波方程模型来进行描述,其中包括电场和磁感应强度的变化规律。
3. 电磁振荡的物理量在电磁振荡中,有一些重要的物理量需要了解。
(1) 振幅:振幅是指电磁振荡的最大偏移量,表示波的振动幅度。
(2) 频率:频率是指电磁波在单位时间内的振动次数,通常用赫兹(Hz)来表示。
(3) 周期:周期是指电磁波振动完成一个完整的周期所需的时间,通常用秒(s)来表示。
(4) 波长:波长是指电磁波振动完成一个完整的波长所需的距离,通常用米(m)来表示。
4. 电磁振荡的类型电磁振荡可以分为两种类型,即机械振荡和电磁振荡。
(1) 机械振荡:机械振荡是指由于机械系统的周期性运动而产生的振动。
例如,弹簧振子、单摆等都属于机械振荡。
(2) 电磁振荡:电磁振荡是指由于电磁场的周期性变化而产生的振动。
典型的例子包括电磁波、交流电等。
5. 电磁振荡的应用领域电磁振荡的应用非常广泛,涉及电信、无线通信、雷达、电磁感应等众多领域。
(1) 电信领域:电磁振荡在电信领域中被广泛应用,可以用于传输和接收信息。
(2) 无线通信领域:无线通信是指不通过物理连接的方式进行信息传输,电磁振荡可以实现无线通信的传输和接收。
(3) 雷达领域:雷达是宇航和军事等领域中常用的一种目标检测和测距的设备,它利用电磁波的速度和反射来实现对目标的探测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x
F v
A
F
2
二、描述简谐振动的特征量
x(t)=Acos( t+ )
1、振幅 A (离开原点的最大距离) 2、振动圆频率 2 1 2 周期T T 3、相位 (1) ( t + )是 t 时刻的相位 (2) 是t =0时刻的相位 — 初相
3
解析法
x A o -A
x
2
x2
x1
2
t
0 A2
1
A1 x
超前、落后以小于 的 相位角来判断!!!
2 1
0 A1
x
7
例、振子的振动周期为12s,振子由平衡位置到正向最 大位置处所需的最短时间是多少?振子经历上述过程的 一半路程所需最短时间是多少? 解: 旋转矢量转过的角度为 2 最短时间为: t2 x T 2 2 3s t 2 4 T 振子经历上述过程的一半路程时 t 1 旋转矢量转过的角度为 x 6 于是: T 6 6 1s t 3 2 12 T
8
例.一谐振动的振动曲线如图所示.求、以及振动方程 x 解:t = 0时x0 A v 0 0
t =1时
x1 0
3
2
π
A
3
x
A 2
A 0
1.0 t
Φ1 =ωt1 + j =ω × 1 π =π 3 2 π 5 x = A cos (6 πt 3 )
π Φ1 = 2
v1 0
第十章 机械振动和电磁振荡 振动:
物理量 (如位移、电流 等)在某一数值附近 反复变化。 机械振动 振 动 电磁振荡
{
受迫振动 自由振动
{
阻尼自由振动 无阻尼自由振动
{
无阻尼自由非谐振动 无阻尼自由谐振动 (简谐振动)
1
§10-1 谐振动
一、简谐振动的特征及其表达式 F ——离开平衡位置 的位移是时间的正 弹 弦或余弦函数 v 簧 x(t)=Acos( t+ ) 振 F=0 x=0 子 谐振动的表达式 的 运动学方程 振 -A 动 F=0 x=0 A
已知 x0 = 0 v0 相应的旋转矢量图为
x0
2
v0
0.2
2 (m) (SI)
v0
15
六、简谐振动的能量
x A cos(t )
(1) 动能
v A sin( t )
(2) 势能
1 2 E p kx 2
1 2 2 kA sin ( t ) 2 1 2 Ek max kA Ek min 0 2
t
x A cost
17
一弹簧振子作简谐振动,总能量为 E1,如果谐振动 的振幅增加为原来的两倍,重物的质量增加为原来的 4倍,则其总能量将变为
(1)E1/4;(2)E1/2; ( 3) 2E 1 ; ( 4) 4E 1 。
18
M l mg sin 很小) l mg 2 2 d M J ml 2
-A1
两质点同时到达各自 同方向的极端位置, 同时越过原点向相同 方向运动
-A1
0
A1 A2
两质点同时到达各自 相反方向的极端位置, 同时越过原点但向相 反方向运动
A2
0
A1
6
(2)超前和落后 若 = 2- 1>0, 则 x2比x1较早达到正最大, 称x2 比x1超前 (或x1比x2落后)。 A
1 1 2 Ek mv m 2 A2 sin 2 (t ) 2 2
E p max
1 2 (3) 机械能 E Ek E p kA 系统机械能守恒 2 由起始能量求振幅 E 1 kA2 A 2 E 2 E0 k k 2
1 2 2 kA cos (t ) 2 1 2 kA E p min 0 2
b 2a
可见,该系统作简谐振动
20
作业: 10.2, 10.4, 10.3, 10.9
21
2
x A cos(t )
13
d 2x k x0 2 dt m
x A cos(t )
固有(圆)频率
k k:弹簧劲度系数 弹簧振子: m m:振子质量
固有频率ω决定于系统内在性质 振幅A和初相φ决定于 初始条件
x0 A cos x A cos(t ) t 0 A sin(t ) 0 A sin
x = A cos (t﹢ )
2
A 0.12
t = 0 时 x0 A , v0 0 =
x = 0.12 cos (t- /3 )
2 T
/3
x
A cos (t﹢ ) A A
0.104 (m) 0.19 ( m · s -1 ) 1.03 ( m · s -2 )
A
π
2
x
ω=
5 6
π
9
本题ω 的另一种求法:
5 3 2 1 6
A
π
t =1
2
π
t=0
0.04
1 0.04 2
3
x
A
简谐振动的
曲线
完成下述简谐振动方程 0.04
2
10
四、简谐振动的速度、加速度 位移 x A cos( t ) dx 速度 A sin( t ) A cos( t ) dt 2 速度也是简谐振动;频率和位移相同,比位移超前/2 d 2x 2 2 a A cos( t ) 加速度 A cos(t ) 2 dt 加速度也是简谐振动;频率和位移相同,比位移超前 位移和加速度反相 a 2 A x、 、 a A A x T - 2A > 0
曲线法
x(t)=Acos( t+ )
特征量 A、ω、
= /2
T
t
旋转矢量法
A的大小:振幅 A A 旋转方向:逆时针方向
A
t=t
t+ A旋转角速度:振动的圆频率 o t=0时刻 A 与x轴的夹角:初相 x = A cos( t + ) t时刻 A与x轴的夹角:相位 t+ A在x轴上的投影:振动方程
16
1 2 E kA 2 E
Ep
谐振子的动能、势能及总能量
1 2 2 E k kA sin t 2 1 1 kA2 kA2 cos(2 t ) 4 4 1 E p kA2 cos 2 t
2 1 1 2 kA kA2 cos 2 t 4 4
Ek
o x
t
o
a<0 减速
-A - A
o
t <0 <0 加速 <0 >0 减速 >0 >0 加速
11
某物体沿
周期 T = 2 s,t = 0 时 物体背离原点移动到位置 x0 = 0.06 m处 初相 , t = 0 .5 s 时的位置 x, 速度 v, 加速度 a
X 轴作简谐运动, 振幅 A = 0.12 m, 例四
2 2 A x0 02
0 arctan x 0
14
m = 5×10 -3 kg 弹簧振子 k = 2×10 -4 N· m -1 s -1 t = 0 时 x0 = 0 v0 = 0.4 m·
完成下述简谐振动方程
k m 0.2 (rad · s –1)
12
五、简谐振动的动力学方程 1、简谐振动的动力学方程(动力学部分) 简谐振动: 质点在与对平衡位置的位移成正比而反向的合外力 作用下的运动 线性恢复力 (F= -kx) 动力学方程 (以水平弹簧振子为例)
d 2x F ma m 2 kx dt
2
d x d x k 2 x0 x 0 2 2 dt m dt
2 dq bq 证明: E a c 常量 2 dt dE dq d 2q bq dq 对t求导: 2 0 2a 2 dt 2 dt dt dt 2
d 2q b 整理,得: dt 2 2a q 0
A t=0
x
4
三、相位差
x1 A1 cos(1t 1 ) 两振动方程为: x2 A2 cos(2t 2 )
相位差为: =( 2 t+ 2)-(1 t+ 1) 初相差
对两同频率的谐振动 = 2- 1
5
(1)同相和反相 = 2- 1 = 2k ( k =0,1,2,…) = (2k+1) ( k =0,1,2,…) 两振动步调相同,称同相 两振动步调相反 , 称反相 x x x 1 A1 A1 同相 反相 x1 A2 A2 x2 T o T o t t - A2 - A2 x2
七、几种常见的谐振动 1.单摆
θ 转 动 正方 + 向
l
m
mg
dt 2 d 2 l mg ml 2 dt 2 d g 2 0
m cost )
dt
l
g l
ቤተ መጻሕፍቲ ባይዱ
2 l T 2 g
19
例. 求证:若一个系统的总能量不随时间改变,且可 以写成如下形式 dq 2 bq 2 则:该系统一定做 a c 简谐振动 2 dt