稳像振镜系统的设计
手持稳像望远镜系统设计的开题报告

手持稳像望远镜系统设计的开题报告一、项目背景随着科技的进步,望远镜越来越成为人们探索宇宙奥秘的工具之一。
目前市面上的望远镜种类繁多,但由于地球自转和观测时的摆动等因素的影响,手持望远镜观测时很难保持镜头的稳定。
因此,为了提高观测质量,稳像望远镜被广泛使用。
本项目旨在设计一款手持稳像望远镜系统,通过精确的姿态控制,将望远镜的观测误差控制在可接受范围内,提高观测质量。
二、研究目标本项目的主要研究目标包括:1. 设计一种手持稳像望远镜系统,通过精确的姿态控制实现稳定观测;2. 对系统进行动力学建模和分析,优化控制算法,提高控制精度;3. 测试实验室和现场实验验证系统性能,评估其适用范围和实用价值。
三、研究内容1. 系统设计和组件选型根据系统要求,选择合适的姿态传感器、电机驱动器、控制器等组件,设计系统硬件平台。
通过传感器采集姿态参数,经过控制算法计算控制信号,驱动电机进行控制。
2. 动力学建模和控制算法设计对系统进行动力学建模,确定系统状态方程和控制对象。
基于反馈控制理论设计合适的控制算法,并通过模拟仿真验证控制性能。
3. 系统性能测试通过实验室测试和现场实验验证系统稳像性能。
通过比较实验结果和理论模拟数据,评估系统控制精度和适用范围。
四、项目意义稳像技术可以广泛应用于天文观测、地学调查、军事侦察、船舶航行等领域。
本项目的研究成果可应用于实际生产和科研中,提高手持望远镜的稳定性,推动稳像技术的发展。
五、研究计划与进度预计本项目研究周期为12个月,具体工作计划如下:第一阶段(前三个月):系统设计和组件选型;第二阶段(中间六个月):动力学建模和控制算法设计;第三阶段(后三个月):系统性能测试和实验结果分析。
目前已完成系统设计和组件选型,进入动力学建模和控制算法设计阶段,计划在第二阶段完成模拟仿真验证和控制算法优化。
稳像
摘要(2)电子防抖技术。
目前使用的电子防抖是针对CCD上大约2/3 的面积进行图像分析,然后根据抖动,利用边缘的图像来进行补偿[2,3,4],大多数数码摄像机都采用这种方法。
不过,这种方法首先是降低了CCD的利用率,其次,对静态图像的帮助不大。
(3)CCD 防抖技术,其代表性厂商是柯尼卡美能达公司。
它没有把防抖装置安装在镜头中,而是设计在CCD 上。
CCD 防抖的原理就是将CCD 安置在一个可以上下左右移动的支架上,先检测出是否有抖动,由于使用陀螺传感器,抖动的检测与光学防抖基本相同。
然后传感器检测出的信号经过处理,计算出可以抵消抖动的CCD 移动量。
与光学防抖相比,这种结构避免了光学防抖补偿方式带来的球差问题,也同时解决了困扰单反交换镜头的诸多体积和由此带来的成像质量下降的各种问题,缺点就是由于对应高精度的机构要求,确保这种要求的制造技术有一定难度。
影像稳定技术在望远镜上的应用现状与数码相机和摄像机的多样化防抖动方式相比,影像稳定系统在传统望远镜上应用,通常只能采用光学防抖的方式。
国外的一些光学仪器公司已经推出了带有影像稳定系统的望远镜,而国内在这方面的研究与产品几乎处于空白。
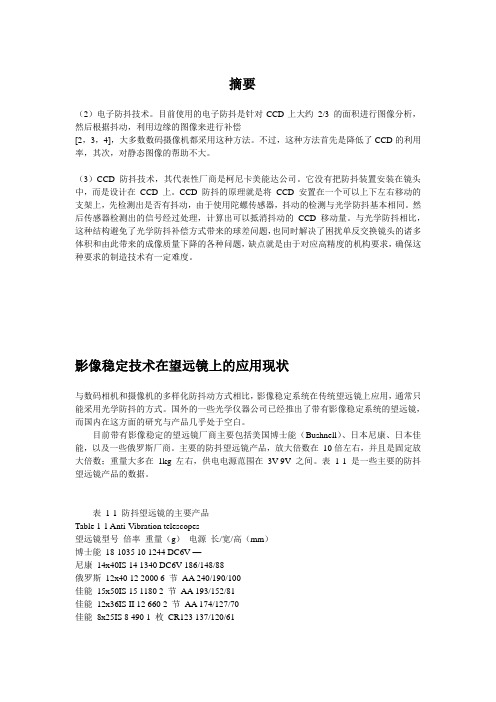
目前带有影像稳定的望远镜厂商主要包括美国博士能(Bushnell)、日本尼康、日本佳能,以及一些俄罗斯厂商。
主要的防抖望远镜产品,放大倍数在10倍左右,并且是固定放大倍数;重量大多在1kg 左右,供电电源范围在3V-9V之间。
表1-1 是一些主要的防抖望远镜产品的数据。
表1-1 防抖望远镜的主要产品Table 1-1 Anti-Vibration telescopes望远镜型号倍率重量(g)电源长/宽/高(mm)博士能18-1035 10 1244 DC6V —尼康14x40IS 14 1340 DC6V 186/148/88俄罗斯12x40 12 2000 6 节AA 240/190/100佳能15x50IS 15 1180 2 节AA 193/152/81佳能12x36IS II 12 660 2 节AA 174/127/70佳能8x25IS 8 490 1 枚CR123 137/120/61目前最小巧的防抖望远镜是佳能8x25IS,重量只有490g,使用 1 枚3V 的CR123 锂电池,可以连续工作 6 小时。
光学稳像系统颤振抑制性能的分析与设计
件间发生频带较宽的颤振 , 降低 了光学系统成像传递函数 . 使得获取 的图像存在运动模糊和畸变 . 严重影响 了图像空间分辨率水平 。光学稳像技术是一种用于实时补偿光路颤振对成像影响的有效方法[1 N S I. A A -在 2 的 T A E相机 和 S l — R C oa B空 间望 远镜 上 均获 得 良好 的应 用 效果 f 已成 为 提升 空 间相 机分 辨 率水 平 的 核心 r 3 _ . 技 术之 一 。
关 键词 光 学遥 感 光 学成像 稳 定 颤振 抑制 空间相机 中图分 类号 : 4 58 V 4. 文 献标 识码 : A 文 章编 号 :0 9 8 1 ( 0 2 0 — 0 3 0 10 — 5 8 2 1 )4 0 3 — 9
D I 1 . 6 /i n10 — 5 82 1 .40 5 O :03 9 .s . 9 8 1 . 20 . 9 js 0 0 0
cm ue i lt n n ad aei elo x ei n r ar do ta dteep r e t eut js f te o p t s ai sad hrw r t p ep r r mu o nh o me t ec r e u ,n x ei n rsl uty h a i h m s i
第 4期
林嚣 等: 光学稳像 系统颤振抑制性 能的分析与设计
3 5
F g2 l c ig a o e e a p ia ma e sa i z t n s se lo i . B o k d a r m fag n r l t li g tb l a i y t m p o c i o o
t e ln —o - ihtmoi n r ltv o a l n sc mpe ae a d t e i g u lt si r v d ef c ie y n t i h i e f sg to e ai ef c lp a e i o ns t d. n h ma e q a i i mp o e fe t l .I h s y v pa e ,he o tc li g tbi z to y t m s c n i e e s a k n fc o e o p s r o c n r ls se p r t p i a ma e sa l a in s se i o sd r d a i d o l s d l o e v o to y t m.Op i a i tc l
空间稳像系统摆镜的柔性支撑设计与分析

空间稳像系统摆镜的柔性支撑设计与分析王洪伟【摘要】为了让空间稳像系统在保证镜面精度的同时增加支撑强度,根据柔性支撑的设计理念,用消应力槽法对镜体支撑架进行柔性设计,用胶体粘结的方式在镜体与支架之间建立柔性连接。
首次利用等效刚度法对平面型胶层进行精细有限元建模,推导了相应的等效刚度矩阵,并对装配后的镜面组件整体进行有限元建模和模态分析。
模态分析的一阶谐振频率仿真结果为704.24Hz,与实物的检测结果693.5Hz 相比只差了1.5%。
由此可见,消应力槽法和等效刚度胶层建模法有效地完成了摆镜组件的柔性设计分析,能为类似光学设计工程中的柔性支撑设计分析提供参考。
%To make space image stabilization system ensure the accuracy of the tip /tilt mirror and increase its support strength,a flexible support structure is designed using stress relief groove method,and a flexible connection between the mirror and its support is established using glue.The equivalent stiffness method is used to build fine finite element model for a planar -type layer.Meanwhile,equivalent stiffness matrix is deduced and calculated.The finite element model of tip /tilt mirror assembly is built,and then the modal analysis is done.The results show that the first resonance frequency is 704.24 paring with the 693.5 Hz of real experimental results,the error is only 1 .5%.This shows that the stress relief groove method and glue layer’s finite element modeling method can complete the design and a-nalysis of flexible tilt/tilt mirror effectively.Also it can provide a reference for similar optical projects in the flexible support design and analysis.【期刊名称】《激光与红外》【年(卷),期】2016(046)004【总页数】6页(P456-461)【关键词】摆镜;柔性支撑;等效刚度法;胶层建模【作者】王洪伟【作者单位】中国人民武装警察部队工程大学,陕西西安 710086【正文语种】中文【中图分类】TH745空间稳像系统的稳像功能主要是通过其内部的摆镜组件来完成,摆镜组件通过摆镜快速精准的微小摆动来达到消除各类外界抖动引起图像目标抖动的目的[1]。
空间稳像系统摆镜设计与仿真
中 图 分 类 号 : H7 T 4 文献标 志码 : A 文 章 编 号 :10 — 2 62 1 )4 0 5 - 8 0 7 2 7 (0 20 — 9 8 0
De i n a d sm u a i n o itm i r r f r s a e i a e s a i z d s se sg n i l to ftl r o o p c m g t b l e y t m i
摘 要 :摆镜作 为稳像 系统核 心部件 , 摆镜 单元的性 能参数 和 外载荷 对摆镜 面形 的影 响为摆镜 设计和
装 配的主要 约束条件 。 设计约 束基础上 , 在 对摆镜及 其装卡 结构 材料进行 了选择 , 对结构进行 了轻量化 设 计。为 考察外载作 用对摆镜 面形影响规律 , 用接 触非线性有 限元方 法对摆 镜组件进 行 了仿 真 , 用 使 使 基 于 Z rie多项式 的光机 集成仿 真方 法消除刚体位 移 , en k 得到 了消除 刚体位 移后摆镜 面形参数 。仿真 结 果 表 明: 外载作用 下摆镜 刚体位 移 明显 ; 紧力作 用下 刚体 平移 占据 了刚体 位移 的主要 方面 ; 力载荷 预 动 作 用下 , 当重力存在 于光轴方 向时 , 力载荷 对摆镜 面形起主 要作 用 , 则动力栽荷 对摆镜 面形起 主导 静 否 作 用。在仿真数 据基础上 , 对摆镜 零件进 行 了加工和 装配 , 对装 配后 摆镜进行 了面形测试 , 测试 结果表 明: 摆镜 面形能够满足设 计要 求 , 也说 明 了摆 镜结构设 计的合理性 和仿真 方法的有 效性。
s lce a d t e lg t eg t e i n f r t t m ro nd ixn s u t r wa o b p o e s d.I r e t ee t d n i hw i h d sg i h o l i r a f ig t cu e r s t e r c se n odr o c e k h e n l e c l w o tl i ro s ra e n e e tr l o d, te a s mb y f il i ro wa h c t i fu n e a f i m t r u f c u d r x ena l a h se l o t t m r s a ay e sn o tc o l e n t lm e t me o n lz d u i g c n a t n n i a f ie ee n t d.Th rgd d s lc me t n r i h e i i ipa e n wa ei n td b u ig s l i m ae y sn
基于稳健控制的光学成像系统设计

基于稳健控制的光学成像系统设计近年来,稳健控制理论被广泛应用于各种工程系统中,并在降低系统不确定性、提高系统鲁棒性等方面取得了显著成效。
在光学成像系统设计中,同样也可以采用稳健控制规划的思路,优化光学成像系统的成像质量,提高系统的性能表现。
一、光学成像系统的设计基础在光学成像系统的设计中,需要了解成像原理以及系统的各个组成部分的性能指标,以确保系统整体的成像质量和性能表现都能得到保障。
1. 成像原理光学成像系统基于的是物理学的光线传输原理,通过透镜等光学组件对光线进行聚焦和折射,将物体的景象通过光学成像系统传输到成像平面上,形成清晰的图像。
成像质量的好坏主要由系统的分辨率、畸变度、色差、像差等因素决定。
2. 光学组件光学成像系统主要由光源、透镜、滤波器、检测器、运动平台等部分组成,其中透镜是整个系统的核心组件,其调整和控制可对系统成像质量产生较为显著的影响。
二、基于稳健控制的光学成像系统设计基于稳健控制的光学成像系统设计可以分为两个部分:首先是针对系统的不确定因素和外部干扰因素进行确诊和控制;其次是针对系统成像质量进行优化和提升。
1. 系统的不确定性建模与控制光学成像系统存在着多种不确定性因素和干扰因素,如温度变化、物体运动、交叉项效应等,这些因素对系统成像质量均有较大的影响。
因此,首先需要对这些因素进行确诊和建模,提出相应的控制策略。
例如,可以采用自适应控制算法,通过对实时的系统状态和环境变化等因素进行快速反馈和调节,来提高系统的鲁棒性和抗干扰能力。
2. 系统成像质量优化与提升在系统的不确定性和干扰因素得到有效控制之后,可以进一步优化和提升系统的成像质量。
稳健控制理论可以为系统的成像质量提供有效的优化路径。
例如,可以采用经典的极小化像散优化算法,通过对透镜的发射曲面进行优化调整,使系统成像质量得到最大的提升。
同时,可以通过优化透镜的曲率半径、厚度和折射率等参数,来进一步提高系统的成像质量和性能表现。
稳像系统关键技术归纳
稳像系统关键技术摘要:随着光电监视、跟踪、侦察系统使用要求的不断提高,对光学图像的稳定要求也日趋严格。
图像不稳定的实质是摄像系统的光轴与目标之间有无效的相对运动,包括平移和角运动,其中相对角运动对图像的影响尤为严重,论述了现在采用的两类稳像方法,并对新一代的稳像技术——电子学稳像作了概要的介绍,阐述了平台稳定方法和电子学稳像技术在应用中的技术难点。
关键词:摄像,稳像,瞄准线1 引言图像稳定技术包括摄像机、导引头、火控武器的瞄准线等的稳定。
用于人眼观察的摄像系统,图像的不稳定会使观察者产生疲劳感,进而容易导致误判和漏判;对于目标自动识别与跟踪系统会导致动态跟踪误差增大,降低跟踪目标的能力。
引起摄像系统光轴与目标之间的角运动有两种情况:一种是目标的运动,另一种是载体的运动。
通常摄像时目标距离摄像机较远,因目标运动而造成的相对运动较小;然而载体姿态的变化会完全传递给摄像系统的瞄准线,其造成的相对角速度很大。
两者相比,前一个因素可以忽略,所以稳像系统一般都只考虑隔离载体运动。
现在使用的方法主要有光学的方法、光学和电子学结合的稳定平台主动补偿方法以及电子学稳像的方法。
在相当程度上,稳像技术就是要隔离外部对摄像机的扰动,最直接的方法是将摄像系统架设在减振装置上,但是其缺点是减振器只能隔离载体的高频低幅振动,并且经过减振以后的窄带随机振动都在系统的固有频率附近,若谐振频率在系统带宽之内将使图像始终都在不断地抖动,所以必须提高系统的刚度,保证系统谐振频率远大于系统的带宽,低频振动极易使摄像系统丢失目标,解决的方法是采用光学系统的方法或图像处理的方法。
2 光学稳定方法及其存在的问题光学稳像的方法主要可分为利用折射元件、利用反射元件、利用结构光学元件作为调整元件的系统。
根据稳像元件的位置又分为像空间稳像和物空间稳像方法。
在平行光路对视线的控制中,常常可以使用以下的几种方法:2.1 利用折射元件的方法使用折射元件的典型方法是利用可变光楔来控制瞄准线的方向,它是由美国的Dyna-science 公司的科技人员最初提出的,根据出射角和入射角之间的关系:αααβ)1(-+==n n通过移动或转动一个角度为α、折射率为n 的光楔,使出射光线按近似α)1(-n 的角度改变方向来进行像的随机扰动补偿。
基于图像相关检测的快速反射镜稳像系统及方法

基于图像相关检测的快速反射镜稳像系统及方法
焦慧华;周伟
【期刊名称】《安徽电子信息职业技术学院学报》
【年(卷),期】2018(017)001
【摘要】基于图像相关检测的快速反射镜稳像系统,指通过快速反射镜偏转光束,对光电成像系统在运动或震动环境中的抖动光轴进行稳定跟踪的系统.该系统首先通
过图像相关的方法对不稳定光轴的偏移量进行实时检测,光轴偏移量反馈给快速反
射镜的控制器,实时控制快速反射镜偏转实现光轴的稳定.该系统可以实现单帧内图像的稳像,消除高分辨率相机在积分时间内由于光轴抖动造成的图像模糊,提高成像系统成像质量.
【总页数】4页(P1-4)
【作者】焦慧华;周伟
【作者单位】琼台师范高等专科学校, 海南海口 571127;中国科学院上海技术物理研究所, 上海 200000
【正文语种】中文
【中图分类】TN911.73
【相关文献】
1.浅析CRISPR/CAS系统诱导的哺乳动物细胞基因组突变及相关检测方法比较 [J], 罗云超;王琳;
2.基于图像的高精度实时光学稳像控制系统 [J], 何林;何海燕;付智红;林喆
3.基于图像处理的稳像火控系统平稳跟踪训练评估系统设计 [J], 刘全胜;聂彬;曹杨
4.快速反射镜状态模型构建方法及其控制系统设计 [J], 艾志伟; 嵇建波; 李静; 黄书童
5.基于图像法稳瞄精度的检测方法研究 [J], 于洵;吕劲松;郭小云
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( e aoaoyo l t - t a nom t nC nrl n eui e nl y,S n e0 5 0 , hn ) K yL brtr fE e r o i l fr ai o to ad Sc ryT c oo cop c I o t h g a h 6 2 1 C ia
第 2 5卷第 6期
21 0 0年 1 2月
光 电 技 术 应 用
E CTR0 — 0PTI LE C TECHNoLoGY APP CAT1 N LI 0l
Vo . 5, . 12 No 6 De e e . 0 0 c mb r 2 1
・
光 学设 计 与 制造 ・
稳像 振 镜 系统 的设 计
须 要与 系统 的入 瞳 口径 相 适 应 , 因此 振 镜 的 口径 较
大 . 由于 振镜 的 振 动 幅度 要 与光 学 瞬 时 视 场 相 匹 而
配 , 以振 镜 的摆 动角度 也很 大 . 所 因此 要实 现 大的方 位视 场 , 必须 快 速搜 索 .
1 稳像振镜光学视场原理
对远 程 目标 的探 测 可 以采 用 面阵探 测 器 , 步 分 凝视 的方法 . 在分 步 凝 视 过 程 中 , 而 由于 全 系 统 ( 光
a e e tn nd d t c i g.
Ke r s sa nn — i oபைடு நூலகம்y tm ; eetn p e iu l c n ig ywo d :cn ig m r rs se d tcig; rco sys a n n r
在远程 光 电探 测 中 , 目标 有 可 能 在 天 空 背 景 、 大海背 景或 者是 陆 地 背 景 下 出 现 , 而且 由 于探 测 距 离 比较 远 , 大气 气流会 对 系统 探测 过程 中产 生影 响 . 远 程光 电探 测系 统 的 瞬 时视 场一 般 不 大 , 速 扫 描 快 是 实现 系统视 场 的必要 途 径 . 过在 方 位 和 俯 仰 上 通 有 规律 的扫描 , 动 光 学 与 传感 器部 件 对 不 同 的空 带 域 成像 , 而实 现对 空域 的搜索 . 以在 成像 系统 前 进 所 端必 须要 用 大 口径 大角 度 的振镜 系 统… .
对 于 快 速搜 索 问题 可 以采 用 高 速稳 像 振 镜 , 在
方位 搜索 的方 向上 反 旋 , 得 在 红 外探 测 器 的积 分 使
时 问 内 , 采集 的空域 不 变 , 而实 现分 步凝 视 和快 所 进
速扫 描 . 图 1 示 , 远 程 目标探 测 系统 的方位 搜 如 所 设
mo n fiet ,h lm iu aly mae il su e oma et ed tcig s se wi o d r iiy a d me to ri t eau n m l tr n a o a wa sd t k h ee tn y tm t ag o i dt n h g
右 , 动 幅度 也很 小 . 口径 的振镜 系统 在天 文望 远 振 大
镜系 统 中有 应 用 , 其 振 动 幅 度 一 般 小 于 8, 能 但 不 满足 远程 探测 需求 . 在远 程 目标探 测 系统 中 , 而 由于 振镜 摆角 较大 , 以为避 免 离轴 像差 过大 , 把稳像 所 要 振 镜放 置 在成像 系统 的前 面 . 这样 , 镜 的 口径 就必 振
屈 玉 宝 , 龙 洋 丛
( 电信息控制和安全技术重点实验室 , 光 河北 三河 050 ) 6 2 1
摘
要: 主要介绍振镜系统 的设计 过程 . 利用振镜 系统 高频率 扫描方 法可 以对远程 目标进 行探测 . 由于整个 探测 系统 的
转动惯量 大 , 以采用铝合金材料使其钢性 大 , 所 质量轻 , 并使用专用传感器进行控 制 , 从而更好地 达到精确扫描探测 的要求 .
l h s , ih c n b o to ld b p ca s n o , n c iv d t e r q i m e t o e t rp e iin s a n n i tma s wh c a ec n r l y s e il e s r a d a h e e h e u r g e e n sf rb t e r cs c n i g o
Ab t a t Th r c s fd s n n h c n i g mir r s s e i i l r s n e . i zn h ih fe s r c : e p o e s o e i i g t e s a n n — ro y t m s man y p e e t d Utl i g t e h g r — g i q e c c n i g me h d o h c n i g mir r s se c n d t c h a g t tt e ln i a c . e t h i u n y s a n n t o ft e s a n n ro y t m a e e tt e t r e h g d s n e Du o t eb g a o t
关键 词 : 镜 系 统 ; 测 ; 确 扫 描 振 探 精
中图分类号 :H 4 . T 7 12
文献标识码 : A
文章编号 :6 3 2 52 1 }6 0 5 2 17 —15 (0 0 0 —0 2 —0
De i ni g o he S a ii a i n m a i c n n — i r r S s e s g n f t t b lz to I g ng S a ni g M r o y t m