水声定位算法学习总结
水声定位算法学习总结
水声定位算法学习总结一、无线传感器定位技术分类目前定位技术广泛地应用到各个领域,而且出现了很多定位算法,常用的定位方法有:到达角(Angel of Arrival,AOA)定位、到达时间(Time of Arrival,TOA)定位、到达时间差(Time Difference of Arrival,TDOA)定位以及AOA/TOA、AOA/TDOA等混合定位的方法。
选择哪种定位方法要根据定位精度、硬件条件等因素来确定,但是最终目的是要用优化的方法得到满意的定位精度。
在没有时间同步信号时,往往采用TDOA定位方法,TDOA定位法可消除对移动台时间基准的依赖性,因而可以降低成本并仍然保证较高的定位精度,但是需要有较好的延时估计方法,才能保证较高的时延估计精度。
(1)基于测距的定位技术基于测距的定位方法依靠测量相邻节点之间的距离或者方向信息。
现在有很多成熟的算法被用于基于测距的定位。
例如TOA算法通过信号传播时间获取距离,TDOA算法利用接收从多个节点发出信号的时间差估测位置,而AOA算法则通过为每个节点设置天线阵列来测量节点间的相对方向角度值。
(2)无需测距的定位技术无需测距的定位方法不要求距离信息,只依靠有关待定位传感器与种子节点之间连通性的测量数据。
这种定位方法对硬件要求低,但是测量的准确度容易被节点的密度和网络条件所影响,因此不能被对精度要求高的基于WSN的应用采用。
二、三边定位和多变定位(1)信号强度(RSS,Received Signal Strength)通过信号在传播中的衰减来估计节点之间的距离,无线信道的数学模型PLd=PLd0-10nlogdd0-Xσ。
尽管这种方法易于实施,但却面临很多挑战。
首先信道由于受到信道噪声、多径衰减(Multi-path Fading)和非视距阻挡(Non-of- Sight Blockage)的影响[1],具有时变特性,严重偏离上诉模型;其次衰减率会随外界环境的不同而发生相应改变。
第4章_长基线水声定位系统(LBL)汇总
T2
t2
t1 2
F3 T1=t1/2
T2
F4
R2 c T2
应答器与TTS的距 离(多个)
8
2020/10/2
几种应用模式
舰船导航模式--简化模型
F3 R1i
F4
F3 F4
9
由于被定位目 标(水面船) 到应答器的单 程传播时间的 求解方法一样。 因此,可以简 化表示。
图中船上问答 机询问信号用 F3表示(通常 只有一个频 率),应答器 回答信号用F4 表示(实际上 有几个应答器 就有几个回答 频率)。
2020/10/2
几种应用模式
长基线有缆潜器(TTS)导航模式
母船上只有接收机,TTS上装有问答机。 定位对象为TTS 求TTS与T的斜距R2 工作过程
设:接收时刻t1、t2 单程传播时间T1、T2 则,
T2
1 2 t2
1 T1 t1 2 t2
问答机
t1 t2 T2
F3
R2 cT2 R1 cT1
4
换插图??
2020/10/2
引言
本章要解决的问题
本章主要研究利用海底应答器的长基线水声定位系统, 利用无线电浮标的长基线系统基本原理是相同的。
长基线系统的几种应用模式(定位解算时,依定位模 式的不同获取水声传播距离的方式也有所不同。)
海底应答器的标校(定位系统的阵元为应答器,因此 应答器的位置测量精度对定位精度有直接影响)
基线安装的位置:海底
特点:利用海底应
定位方法:长基线利用海底应答器阵来确定载体的位置 答器阵来确定载体
记录询问时刻和各应答器应答信号到达时刻
的位置----相对于
位置坐标:定位的坐标是海底应答器阵的相对坐标 海底应答器阵的相
水声学原理知识点总结
水声学原理知识点总结【1】水声学原理的基本概念1.1. 声波的产生与传播声波是一种机械波,是在介质中震动传递的波动。
声波通常是由物体振动引起的,当物体振动时,周围的空气分子或水分子也随之振动,形成声波。
在水中,声波的传播速度一般比在空气中要快。
1.2. 水声频率与声波速度水声波的频率通常在20 Hz-200 kHz之间,与空气中的声波频率范围相似。
不同频率的声波在水中的传播速度也有所不同,通常音速约为1500 m/s。
1.3. 水声学的应用领域水声学在海洋工程、海洋资源开发、水下通信、声纳探测、水下定位等领域有广泛的应用,其中声纳技术是水声学应用的重要方面。
【2】声波在水中的传播2.1. 声波的传播方式声波在水中的传播方式与在空气中的传播方式类似,可以分为纵波和横波。
其中纵波是介质中质点沿波的传播方向振动的波动,而横波则是介质中质点振动方向与波的传播方向垂直的波动。
2.2. 水声波的衰减水中声波在传播过程中会受到水的吸收和散射等因素的影响,导致声波的衰减。
较高频率的声波在水中的衰减更为显著,这也是水声通信和声纳探测中需要考虑的重要因素。
2.3. 水声波的折射和反射声波在水中传播时,会发生折射和反射现象。
当声波通过不同密度的介质界面时,会因为介质密度的不同而发生折射现象;在与固体或液体的界面发生交界时,声波会发生反射。
【3】水声信号的特点3.1. 水声信号的特点水声信号与空中声信号相比有一些特殊的特点,如传播距离远、传播速度快、传播路径复杂、受环境干扰大等。
3.2. 水声通信的特点水声通信由于其传播路径的复杂性和环境干扰的影响,通常需要考虑信号传播延迟、传播路径损耗、噪声干扰等问题。
3.3. 声纳探测的特点声纳探测是利用声波在水中传播的特性来进行目标探测和定位,需考虑水中声波传播的复杂性、目标散射特性等因素。
【4】水声传感器技术4.1. 水声传感器的种类水声传感器包括水中听音器、水中发射器、水下通信装置等。
水声通信系统中的定位与跟踪技术研究

水声通信系统中的定位与跟踪技术研究在当今的科技领域中,水声通信系统扮演着至关重要的角色。
它在海洋探索、水下军事行动、资源开发以及科学研究等众多方面都有着广泛的应用。
而在水声通信系统中,定位与跟踪技术则是其关键组成部分,对于实现高效、准确的水下信息传输和目标监测具有不可替代的作用。
首先,我们来了解一下水声通信系统的基本原理。
简单来说,它就像是在水下的“无线电通信”,但由于水的物理特性与空气有很大的不同,使得水声通信面临着诸多独特的挑战。
水对声音的吸收、散射以及多径传播等现象,都会严重影响声音信号的传播质量和距离。
在这样复杂的环境中,要实现对目标的准确定位与跟踪并非易事。
定位技术主要依靠测量目标发出或反射的声音信号的到达时间、到达角度、信号强度等参数来确定目标的位置。
常见的定位方法包括基于时间差的定位、基于角度测量的定位以及基于信号强度的定位等。
时间差定位法是通过测量声音信号到达不同接收器的时间差来计算目标的位置。
这种方法需要多个接收器精确同步工作,并且对时间测量的精度要求极高。
一旦时间测量出现微小的误差,就可能导致定位结果出现较大的偏差。
角度测量定位法则是通过测量声音信号到达接收器时的角度来确定目标的方向,进而计算出目标的位置。
这需要接收器具备高精度的角度测量能力,并且在实际应用中,由于水下环境的复杂性,角度测量往往会受到干扰,影响定位的准确性。
信号强度定位法是根据声音信号在传播过程中的衰减规律,通过测量接收信号的强度来估算目标与接收器之间的距离。
然而,水对声音的吸收和散射会导致信号强度的变化非常复杂,使得这种方法的精度受到一定限制。
除了定位技术,跟踪技术也是水声通信系统中的关键环节。
跟踪的目的是持续监测目标的运动状态,包括速度、方向等,并及时更新目标的位置信息。
常见的跟踪算法有卡尔曼滤波、粒子滤波等。
卡尔曼滤波是一种基于线性系统模型的最优估计方法。
它通过对目标的状态进行预测和更新,能够在存在测量噪声的情况下,较为准确地估计目标的状态。
水声探测中的深度学习方法研究
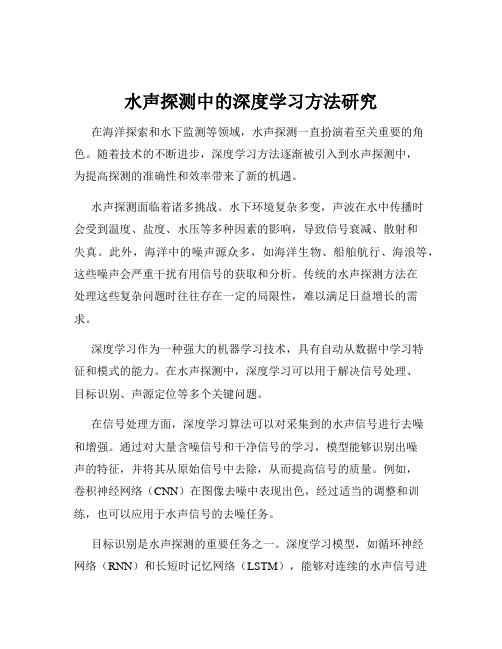
水声探测中的深度学习方法研究在海洋探索和水下监测等领域,水声探测一直扮演着至关重要的角色。
随着技术的不断进步,深度学习方法逐渐被引入到水声探测中,为提高探测的准确性和效率带来了新的机遇。
水声探测面临着诸多挑战。
水下环境复杂多变,声波在水中传播时会受到温度、盐度、水压等多种因素的影响,导致信号衰减、散射和失真。
此外,海洋中的噪声源众多,如海洋生物、船舶航行、海浪等,这些噪声会严重干扰有用信号的获取和分析。
传统的水声探测方法在处理这些复杂问题时往往存在一定的局限性,难以满足日益增长的需求。
深度学习作为一种强大的机器学习技术,具有自动从数据中学习特征和模式的能力。
在水声探测中,深度学习可以用于解决信号处理、目标识别、声源定位等多个关键问题。
在信号处理方面,深度学习算法可以对采集到的水声信号进行去噪和增强。
通过对大量含噪信号和干净信号的学习,模型能够识别出噪声的特征,并将其从原始信号中去除,从而提高信号的质量。
例如,卷积神经网络(CNN)在图像去噪中表现出色,经过适当的调整和训练,也可以应用于水声信号的去噪任务。
目标识别是水声探测的重要任务之一。
深度学习模型,如循环神经网络(RNN)和长短时记忆网络(LSTM),能够对连续的水声信号进行分析,提取目标的特征,并准确识别出目标的类型。
相比传统的基于特征工程的方法,深度学习能够自动学习到更具代表性和鲁棒性的特征,从而提高识别的准确率。
声源定位也是水声探测中的关键问题。
深度学习可以结合多个传感器接收到的信号,利用其强大的拟合能力,准确估计出声源的位置。
此外,通过使用生成对抗网络(GAN)等技术,还可以对水下环境进行建模和仿真,为声源定位提供更准确的先验知识。
然而,将深度学习应用于水声探测并非一帆风顺,还面临着一些问题和挑战。
首先是数据的获取和标注问题。
高质量的标注数据对于深度学习模型的训练至关重要,但在水声领域,获取大量准确标注的数据往往十分困难。
水下实验成本高昂,且数据采集受到多种条件的限制。
水声定位

各个水听器测的与目标的斜距为:
长基线水声定位系统
目标与原点的斜距为:
将式中
展开得:
从而得到:
ri
消去
r
可得方程:
用矩阵可写作:
其中,
但矩阵A奇异,因此方程有多个解,得不到唯一解。考虑再增加一个水听器, 并测得它与目标的斜距 r4,可得另一个方程:
消去
r 得:
用上式代替矩阵方程第三行,则矩阵A非奇异,方程组可得到唯一解。 但当水听器都位于同一水平面,且 仍然是奇异矩阵,可用三个水听器得测量值以及 已知时 ,矩阵A 联立,得方程组:
在海底布设由T1,T2,T3组成的水听 器接收基阵,在直角坐标系坐标分别为
T1 (x1, y1,z1), T2 (x 2 , y2 ,z2 ), T3 (x3 , y3 ,z3 ) ,水听器位置
校准后,则假定坐标为已知量。 各个水听器到原点的距离为:
di xi 2 yi2 zi2 (i 1, 2,3)
短基线水声定位
系统组成: 1) 被定位的船或潜器上至少有3个水听器。 2) 间距在5~20米的量级。 3) 水面船上面装有问答机 4) 一个同步信标(或应答器)置于海底 工作原理 问答机接收来自信标(或应答器)发出的信号, 根据信号到达各基元的时间,求得斜距,据此可计算 水面船相对于信标(或应答器)的位置。
超短基线定位系统的基阵长度一般在几厘米到几十厘米,与前两种不同,利
用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式划分,以上三种定位系统都可以选择使用同步信标或应
答器工作方式。
询问器或问答机:是安装在船上的发射器和接收器。它以一个频率发出询 问信号,并以另一频率接收回答信号。接收频率可以多个,对应于多个应 答器,常常只相隔0.5kHz。发射和接收换能器是无指向性的。 应答器:是置于海底或装在载体上的发射/接收器。它接收问答机的询问信 号(或指令),发回另一与接收频率不同的回答信号。收发换能器无指向 性的。 声信标:置于海底或装在水下载体(潜器)上的发射器,它以特定频率不 停的发出声脉冲。它是自主工作的。声信标分同步式和非同步式两种。 响应器:置于海底或装在水下载体(潜器)上的发射器,它由外部硬件 (如控制线)的控制信号触发,发出询问信号。问答机或其它水听器接收 它的信号。它常用于噪声较强的场合。
水声定位系统算法研究
水声定位系统算法研究1.引言水声定位系统是一种广泛应用于海洋、水下物探、水下通信及水下机器人等领域的技术。
水声定位技术具有定位精度高、适应海底环境等特点,因此受到重视。
定位系统的关键是算法,本文旨在探讨水声定位系统中的算法。
2. 水声定位系统基础水声定位技术包括超声波、声呐和声纳等技术,其中以超声波技术最为常用。
超声波是一种高频声波,根据声波在水中的传播速度和接收时间差来测量目标物体的距离。
声呐和声纳是利用声波在水中的传播特性,通过控制声波的发射和接收实现目标物体的定位。
水声定位系统通常由超声发射器、超声接收器和计算机三部分组成。
其中发射器发出超声波信号,接收器接收信号,计算机进行信号处理和定位计算。
3. 水声定位算法研究3.1 距离定位算法距离定位算法是一种简单常用的定位算法,其定位原理是根据声波传播速度和声波发射与接收时间差计算目标物体到发射器与接收器之间的距离,由此确定目标物体的位置。
该方法适用于目标物体距离较远但定位精度要求不高的场合,如海洋频段的目标物体。
3.2 角度定位算法角度定位算法是在距离定位算法的基础上加入角度信息,通过三角定位计算目标物体的位置。
该算法需要至少三个超声发射器和至少三个超声接收器,利用发射器和接收器之间的角度信息来计算目标物体的位置。
该方法定位精度较高,适用于在水下环境中需要高精度定位的应用场合。
3.3 最小二乘法定位算法最小二乘法定位算法是一种利用最小二乘原理来计算目标物体位置的方法。
该方法利用多个超声发射器和接收器发射和接收声波,并且测算出目标物体到发射器和接收器之间的距离和时间差。
在此基础上通过最小化误差平方和来得到目标物体的位置信息。
该方法适用于需要高精度定位的场合。
4. 算法应用实例4.1 海底石油管道检测海底石油管道是一种重要的能源输送管道,为保障其安全运输,需要对其进行定位和检测。
通过水声定位系统,可以定位管道的位置和检测管道的状态,如是否有渗漏或磨损等情况。
水声定位算法学习总结
水声定位算法学习总结一、无线传感器定位技术分类目前定位技术广泛地应用到各个领域,而且出现了很多定位算法,常用的定位方法有:到达角(Angel of Arrival,AOA)定位、到达时间(Time of Arrival,TOA)定位、到达时间差(Time Difference of Arrival,TDOA)定位以及AOA/TOA、AOA/TDOA等混合定位的方法。
选择哪种定位方法要根据定位精度、硬件条件等因素来确定,但是最终目的是要用优化的方法得到满意的定位精度。
在没有时间同步信号时,往往采用TDOA定位方法,TDOA定位法可消除对移动台时间基准的依赖性,因而可以降低成本并仍然保证较高的定位精度,但是需要有较好的延时估计方法,才能保证较高的时延估计精度。
(1)基于测距的定位技术基于测距的定位方法依靠测量相邻节点之间的距离或者方向信息。
现在有很多成熟的算法被用于基于测距的定位。
例如TOA算法通过信号传播时间获取距离,TDOA算法利用接收从多个节点发出信号的时间差估测位置,而AOA算法则通过为每个节点设置天线阵列来测量节点间的相对方向角度值。
(2)无需测距的定位技术无需测距的定位方法不要求距离信息,只依靠有关待定位传感器与种子节点之间连通性的测量数据。
这种定位方法对硬件要求低,但是测量的准确度容易被节点的密度和网络条件所影响,因此不能被对精度要求高的基于WSN的应用采用。
二、三边定位和多变定位(1)信号强度(RSS,Received Signal Strength)通过信号在传播中的衰减来估计节点之间的距离,无线信道的数学模型PLd=PLd0-10nlogdd0-Xσ。
尽管这种方法易于实施,但却面临很多挑战。
首先信道由于受到信道噪声、多径衰减(Multi-path Fading)和非视距阻挡(Non-of- Sight Blockage)的影响[1],具有时变特性,严重偏离上诉模型;其次衰减率会随外界环境的不同而发生相应改变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位算法学习总结一、无线传感器定位技术分类目前定位技术广泛地应用到各个领域,而且出现了很多定位算法,常用的定位方法有:到达角(Angel of Arrival,AOA)定位、到达时间(Time of Arrival,TOA)定位、到达时间差(Time Difference of Arrival,TDOA)定位以及AOA /TOA、AOA/TDOA等混合定位的方法。
选择哪种定位方法要根据定位精度、硬件条件等因素来确定,但是最终目的是要用优化的方法得到满意的定位精度。
在没有时间同步信号时,往往采用TDOA定位方法,TDOA定位法可消除对移动台时间基准的依赖性,因而可以降低成本并仍然保证较高的定位精度,但是需要有较好的延时估计方法,才能保证较高的时延估计精度。
(1)基于测距的定位技术基于测距的定位方法依靠测量相邻节点之间的距离或者方向信息。
现在有很多成熟的算法被用于基于测距的定位。
例如TOA算法通过信号传播时间获取距离,TDOA算法利用接收从多个节点发出信号的时间差估测位置,而AOA算法则通过为每个节点设置天线阵列来测量节点间的相对方向角度值。
(2)无需测距的定位技术无需测距的定位方法不要求距离信息,只依靠有关待定位传感器与种子节点之间连通性的测量数据。
这种定位方法对硬件要求低,但是测量的准确度容易被节点的密度和网络条件所影响,因此不能被对精度要求高的基于WSN的应用采用。
二、三边定位和多变定位(1)信号强度(RSS,Received Signal Strength)通过信号在传播中的衰减来估计节点之间的距离,无线信道的数学模型。
尽管这种方法易于实施,但却面临很多挑战。
首先信道由于受到信道噪声、多径衰减(Multi-path Fading)和非视距阻挡(Non-of- Sight Blockage)的影响[1],具有时变特性,严重偏离上诉模型;其次衰减率会随外界环境的不同而发生相应改变。
根据接收到的信号估计出的距离d将有很大误差。
(2)信号传播时间/时间差往返时间(TOA/TDOA/RTOF)a)到达时间(TOA,Time Of Arrival)使用发射机到接收机之间往返的时间来计算收发机之间的距离,要求发射机和接收机严格时间同步。
b)往返传播时间(RTOF,Roundtrip-Time-Of-Flight)发射机和接收机可属于不同的时钟域,基于信号传播时间的测距精度由时间差的测量精度决定。
时间差的精度由参考时钟决定。
c)到达时间差(TDOA,Time Difference Of Arrival)使用两种不同传播速度的信号,向同一个方向发送即可。
图1 示意图(3)接收信号相位差(PDOA,phase difference of Arrival)通过测量相位差,求出信号往返的传播时间[2],计算出往返距离,其中,是信号频率,是信号的波长,是发送信号和反射信号的相位差,由上式可知d的范围是[0,]。
不同的距离如果相差倍,则测量获得的相位相同。
通过相位差的方式测量距离,需要知道距离d范围,才能够确定出n的值,估算出距离。
(4)近场电磁测距(NFER,Near Field EM Ranging)利用近场与磁场的相位差来测量距离,射频信号包括电场和磁场两部分。
例如,当目标距离接近发射天线时相位相差90o;在距离相差1/2波长时,相位差接近0。
由此可以通过电场与磁场的相位差,估计到天线的距离。
近场电磁测距方法的测距范围在0.05之间,最佳测量范围0.08之间。
该方法由于距离限制,现有的定位系统很少采用。
三、TDOA算法研究1.算法种类RSS TOA RTOF TDOA PDOA NFER条件需求信号衰减量发射和接收机之间的往返时间往返传播时间目标发射信号到达各个节点的时间差接收信号相位差相位差与距离的准确关系优点易于实施,对硬件要求较低发射机和接收机可属于不同的时钟域对待测节点没有时间同步要求缺点算法模型受环境影响大,精度较低要求发射机和接收机严格时间同步使用射频信号时要求高精度时钟需要首先知道往返距离范围对测量距离有限制2.(1)对目标时间基准无依赖性选用TDOA算法对待测节点没有时间同步要求。
在无线传感器网络中,实现节点之间的时间同步较为困难。
而且考虑在实际应用中,一般情况下,我们无法获取待测目标的准确时间信息。
TDOA算法只需获取目标发射信号到达各个节点的时间差。
根据一个时间差信息即可将目标定位在一个双曲面上(如图3所示),那么假如有三个时间差信息,则三个双曲面可交与一点,这一点即为目标位置。
由此消除了对目标时间基准的依赖性[3],应用场合得以拓展。
图3 TDOA双曲面模型(2)适合水下环境要求对于水声定位系统,如果采用电磁波传递信息,则在水下将很快衰减。
因此只能够使用声波进行通信。
由上述分析可知,TDOA算法必须依靠高精度的参考时钟来保证其精确度。
对于低成本、低带宽、无参考时钟的无线传感器网络来说,获得高精度的时钟本身就是一个挑战。
如果用射频信号进行测距,的时钟精度就有300m的误差。
但使用超声波等低传播速率信号进行测距时,1ms的时钟精度便可达到30cm的精度。
可见,用超声波信号实现的TDOA算法不仅可满足水下环境的要求,而且能保证足够的定位精度。
3.TDOA算法分析在对目标信源进行定位时,因为无法获得时间同步信号而没有时间基准,常采用TDOA技术得到时延估计值,进而得到目标信源到两个基站之间的距离差,多个TDOA测量值就可以构成一组关于目标信源位置的双曲线方程组,求解该方程组就可以得到目标信源的估计位置[4]。
图4 TDOA算法模型设目标节点的坐标E为E=(x,y,z),其余N+1个已知位置的节点为P0, P1, ...,P m , ..., PN,它们的坐标分别为Pm= (xm, ym, zm),0 ≤ m ≤ N。
则目标与任一节点的距离为(1)为了简化计算可设主节点的坐标为(0,0,0),那么为(2)距离是水中声速v与传播时间的乘积,TDOA算法需要波面到达每个副节点P 1, ..., Pm, ..., PN与到达主节点P的时间差值,即v=v-v(3)v=-(4)图5为了更好地说明这一过程,如图5所示。
P0和P1分别是节点P0, P1接收到E的发射波形,可见P1接收到信号要比P延迟5ms左右,相当于的值。
对P0和P1的波形求互相关函数可得cross-correlation波形。
其峰值时刻对应的时间值即为时间差。
上述仿真分析针对的是连续时间信号,对于离散时间信号可根据式(f*g)[n]进行计算。
1)非线性定位算法通过以上分析知要得到目标的坐标值,至少需要三个时间差信息,因此至少需要P0, P1, P2, P3四个已知位置的节点[5]。
设目标到达主站P0(0,0,0)与各副站的距离差为,则化简可得(5)(6)其中:,。
对于3个距离差测量值可以组成如下非线性方程组(7)先把r作为常量,求出x,y,z关于r的代数式,然后代入中解出r的值。
r的值确定后,x、y、z的值便可确定。
由整个计算过程可知这种非线性算法得到的解可能不唯一,需要解模糊。
此外计算量过大也是其缺点之一。
针对上述非线性算法存在的问题,我们在设计中采用基于最小二乘法的牛顿迭代定位算法对数据进行处理。
最小二乘法定位精度不是很高,但可对目标信源的位置作初始估计。
有了这一估计值,再使用牛顿迭代法对初始结果进行修正,则不但可以提高定位精度,而且可以加快计算速度,节省时间。
①最小二乘法估计初始位置由(8)可得矩阵形式的线性方程组HX=L (8)其中H=,X=,L=要求解X,必须使残差r=HX—L的平方和最小,即f(x)= (9)对上面的方程求导并令其为零,得(10)若为非奇异阵,则得到(11)的最小二乘法估计为(11)②牛顿迭代法修正(1)将用最小二乘法解得的信源位置X设为初始值,代入牛顿迭代法的关系式[3],求解迭代后的位置为(k=0,1,2,…,n-1);(2)分别将和代入n-4个冗余函数表达式(i=5,…,n),利用最优化方法,(i=5,…,n),为根据测距精度要求给定的值,,为给定的精度要求;(3)判断是否满足条件或,如果满足其中的一个条件,则迭代过程结束,输出,否则将结果作为初始值,即,继续上面的步骤,直到满足条件为止。
2)线性定位算法以上的非线性算法采用一个主节点和三个副节点,可测得三个时间差信息,即三个方程。
虽然这样可用最少的节点数目完成定位任务,节约成本,但是有着需解模糊、计算量大、定位实时性较低等缺点。
此时如果增加一个副节点P,则4线性方程组变为(12)此时可把r作为求解变量,直接求解四元一次线性方程组。
由(13)可得矩阵形式的线性方程组HX=L (13)其中H=,X=,L=可得X=H\L,由此可得出目标信源的位置。
由求解过程可以看出,线性定位算法相比非线性算法解法简单,无模糊,求解精度高。
该方法就是常用的五元十字TDOA定位算法。
4.仿真与分析基于上述算法分析,我们对基于最小二乘法的牛顿迭代算法和五元十字定位算法进行了Matlab仿真实验。
4.1 仿真实验(1)基于最小二乘法的牛顿迭代算法图6仿真实验传感器布阵图如图6所示,主节点坐标为=[0,0,0],三个副节点坐标分别为=[2,0,1]、=[0,2,0]、=[2,2,0]。
假设待测目标S的位置是S=[3,4,5]。
计算可得H=,L=最小二乘法估计= ,可见最小二乘法的估计值与目标的实际位置相差较大。
但通过牛顿迭代可提高精确度。
下面给出牛顿迭代法的部分Matlab代码:%牛顿迭代法解非线性方程组%输入参数:迭代初值,迭代方程,精度要求function [h]=Newton(start_newton,F_newton,p_newton)F_temp=start_newton;temp=[0;0;0];while sum(abs(temp-F_temp))>p_newtontemp=F_temp;F_temp=F_temp-subs(F_newton,{'x','y','z'},{F_temp(1),F_temp(2),F_ temp(3)});endh=F_temp;将最小二乘法的估计值代入,通过迭代后可得最终定位结果S’=[2.9998,3.9998,4.9997],S与S’的误差间距为3.9123e-004。
(2)五元十字定位算法图7 仿真实验传感器布阵图如图7所示,主节点坐标为=[0,0,0],四个副节点坐标分别为=[0,2,1]、=[-2,0,0]、=[0,-2,0]、=[2,0,0]。
仍假设待测目标S的位置是S=[3,4,5]。
计算可得H=,L=所以X=H\L=,可得最终定位结果S’=[2.9997,3.9993,4.9999],计算可得S 与S’的误差间距为7.6811e-004。