线性系统理论精简版 ——4.系统的可控可观性剖析
线性系统的可控性和可观性

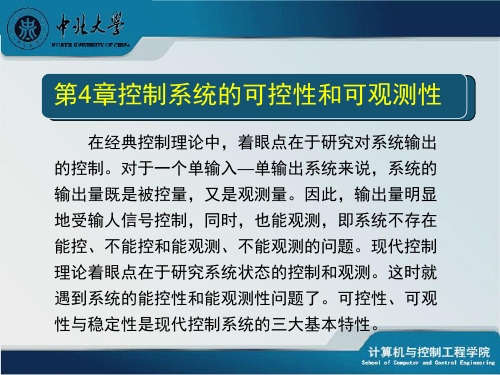
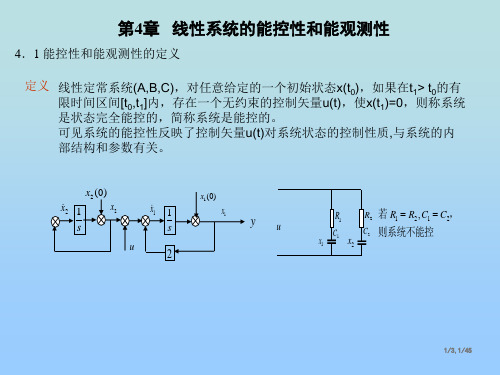
第四章 线性系统的可控性和可观性§4-1 问题的提出经典控制理论中用传递函数描述系统的输入—输出特性,输出量即被控量,只要系统是因果系统并且是稳定的,输出量便可以受控,且输出量总是可以被测量的,因而不需要提出可控性和可观性的概念。
现代控制理论是建立在用状态空间法描述系统的基础上的。
状态方程描述输入)(t u 引起状态)(t x 的变化过程;输出方程描述由状态变化所引起的输出)(t y 的变化。
可控性和可观性正是定性地分别描述输入)(t u 对状态)(t x 的控制能力,输出)(t y 对状态)(t x 的反映能力。
它们分别回答:“输入能否控制状态的变化”——可控性 “状态的变化能否由输出反映出来”——可观性可控性和可观性是卡尔曼(Kalman )在1960年首先提出来的。
可控性和可观性的概念在现代控制理论中无论是理论上还是实践上都是非常重要的。
例如:在最优控制问题中,其任务是寻找输入)(t u ,使状态达到预期的轨线。
就定常系统而言,如果系统的状态不受控于输入)(t u ,当然就无法实现最优控制。
另外,为了改善系统的品质,在工程上常用状态变量作为反馈信息。
可是状态)(t x 的值通常是难以测取的,往往需要从测量到的)(t y 中估计出状态)(t x ;如果输出)(t y 不能完全反映系统的状态)(t x ,那么就无法实现对状态的估计。
状态空间表达式是对系统的一种完全的描述。
判别系统的可控性和可观性的主要依据就是状态空间表达式。
【例如】(1)u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=202001 []x y 01=分析:上述动态方程写成方程组形式:⎪⎩⎪⎨⎧=+==1221122xy u x x x x 从状态方程来看,输入u 不能控制状态变量1x ,所以状态变量1x 是不可控的;从输出方程看,输出y 不能反映状态变量2x ,所以状态变量2x 是不能观测的。
即状态变量1x 不可控、可观测;状态变量2x 可控、不可观测。
线性系统理论(第四章)线性系统的能控性和能观测性
x(t) (t,t0 )[x0 (t)]
上式表明能观测性即是x(t)可由y(t) 完全估计的能力。可
把输入u 的 等价状态 (t) 等同初始状态看待,从而在状
态方程和输出方程中去掉u 的相关项。因此相应的状态
空间描述为
x A(t)x(t)
t0,t J
y C(t)x(t)
x(t0 ) x0
x0TWC (0, t1)x0
t1 0
x0T
eAt
BBT
eAT t
x0
dt
t1 0
BT
eAT t
x0
2
dt
0,
BT eATt x0 0
x(t1) eAt1 x0
t1 eA(t1t) Bu(t) d t 0
0
x0
et1 -At1
0
Bu(t) d t
x0
2
x0T x0
[
et1 -At1
② 系统能控:如果状态空间中的所有非零状态都是在 t0 时 刻可控的,则称系统在 t0 时刻是完全可控,简称系统在 时刻 t0 可控。如果系统对任意初始时刻 t0 完全可控, 则称系统一致可控。
③系统不完全能控:如果对给定得初始时刻 t0 Tt ,如果状
态空间中存在一个或一些非零状态在 t0 时刻是不可控的,则 称系统在 t0 时刻是不完全可控的,也称系统是不可控的。
三、能观测性定义
线性时变系统的状态方程及输出方程为
x A(t)x(t) B(t)u(t) x C(t)x(t) D(t)u(t)
t0,t J x(t0 ) x0
系统状态方程 解
x(t) (t,t0)x(t0)
t
(t, τ)B(τ)u(τ)d τ
《自动控制原理》线性系统的可控性与可观测性
将状态 x(t0 ) = 0 转移到 x(t f ) =x f 的控制作用,则称状态 x f 是 t0 时刻 可达的。若x f 对所有时刻都是可达的,则称状态x f 为完全可达或 一致可达。若系统对于状态空间中的每一个状态都是时刻 t0 可达的, 则称该系统是 t0 时刻状态完全可达的,或简称该系统是 t0 时刻可达
可观测性问题: 相应地,如果系统所有状态变量的任意形式 的运动均可由输出完全反映,则称系统是状态可观测的,简称为系 统可观测。反之,则称系统是不完全可观测的,或简称为系统不可 观测。
可控性与可观测性概念,是卡尔曼于20世纪60年代首先提出 来的,是用状态空间描述系统引伸出来的新概念,在现代控制理论 中起着重要的作用。它不仅是研究线性系统控制问题必不可少的重 要概念,而且对于许多最优控制、最优估计和自适应控制问题,也 是常用到的概念之一。
在研究可观测性问题时,输出 y 和输入 u 均假定为已知,只有初始
状态 x0 是未知的。因此,若定义
t
y(t) = y(t) − C(t) (t, )B( )u( )d − D(t)u(t) t0
则式(9-79)可写为
y(t) = C(t)(t,t0 )x0
(9-80)
这表明可观测性即x0 可由 y 完全估计的性能,由于 y 和 x0 可任意取
y = −6x2
这表明状态变量 x1 和 x2 都可通过选择控制量 u 而由始点达到原
点,因而系统完全可控。 如何判别?
但是,输出 y 只能反映状态变量 x2 ,而与状态变量 x1 既无直
接关系也无间接关系,所以系统是不完全可观测的。如何判别?
变化:(1)b1=0 ? (2)a12≠0 ? (3) a21≠0 ?
值,所
第四章线性定常系统的可控性和可测性资料
• 显然那些与输入(控制)无关的状态是不 可控的,这些状态构成了不可控子空间。 而与输入(控制)有关的状态是可控的, 这些状态构成了可控子空间。
• 上述方法称为按能控性分解,显然主要是 对A和B进行变换。
• ⑵. 另一种,则是按能观性分解,其方法是 类似的。即将状态空间表达式中的状态分 解为:一部分状态与输出有关,另一部分 状态则与输出是无关的。显然这主要是通 过对C的变换来达到。
• ⑶. 第三种方法是按能控性和能观性进行分 解
• 显然如果系统不可控也不可观,则需要同 时进行可控和可观性分解。A, B, C
三. 按可控性分解
• 设定常系统
x Ax Bu
y Cx
(3 1)
是状态不完全能控,其能控性判别阵:
M B, AB, , An1B
的秩 rankM n1 n
1 R1 b 1 ,
0
0 R2 Ab 1 ,
1
1 R3 0 任意
0
1 0 1 R c 1 1 0
0 1 0
• 检查 det Rc 1 0 ,故 Rc 满秩。
•则
0 1 1
Rc1 0 0
1
1 1 1
•则
0 1 1
Aˆ
Rc1 ARc
1
2
0
0
0
1
1
Bˆ
Rc1B
0
• 2.性质
(1).对偶系统 S1和 S2 的传函阵互为转置,即
GS 2 (GS1)T
(2).对偶系统的特征值是相同的
• 3.对偶原理
(1)若 S1 可控则有 S2 可观 (2)若 S2可观则有 S1 可控
线性系统的可控性与可观测性
Image No
第三章 线性系统的可控性与可观测性
本章主要介绍定性分析方法,即对决定系统运
动行为和综合系统结构有重要意义的关键性质(如
可控性、可观测性、稳定性等)进行定性研究。
在线性系统的定性分析中,一个很重要的内容
是关于系统的可控性、可观测性分析。系统的可控、
可观测性是由卡尔曼于60年代首先提出的,事后被
证明这是系统的两个基本结构属性。
本章首先给出可控性、可观测性的严格的数学
定义,然后导出判别线性系统的可控性和可观测性
的各种准则,这的。
整理版
1
Image No
第3章 线性系统的可控性和可观测性
第三章 线性系统的可控性与可观测性
3.1 可控性和可观测性的定义 3.2 线性定常连续系统的可控性判据(※) 3.3 线性定常连续系统的可观测性判据(※) 3.4 对偶原理
如果系统内部所有状态变量的任意形式的运动均可
由输出完全反映,则称系统是状态可观测的,否则就
称系统为不完全可观测的,或简称为系统不可观测。
整理版
3
Image No
第3章 线性系统的可控性和可观测性
例3-1:给定系统的状态空间描述为
xx1204 05xx1212u
y 0
6
x1 x2
图3-1 系统结构图
如果对取定初始时刻 t0 Tt 的一个非零初始状态 x(t0) =x0,存在一个时刻 t1Tt,t1t0 和一个无约 束的容许控制u(t),t [t0,t1],使状态由x(t0)=x0转 移到t1时的x(t1)=0 ,则称此x0是在时刻t0可控的.
整理版
5
第3章 线性系统的可控性和可观测性
第四章线性系统的可控性和可观性2

§4-5 线性定常连续系统的可观测性一、可观测性的定义定义4.4(可观测性定义):设线性定常连续系统的状态方程和输出方程为Bu Ax x+= ,cx y =,如果对于任一给定的输入)(t u ,存在一有限观测时间0t t f >,使得在],[0f t t 期间测量到的)(t y ,能唯一地确定系统的初始状态)(0t x ,则称此状态是可观测的。
若系统的每一个状态都是可观测的,则称系统是状态完全可观测的,简称系统是可观测的。
二、线性定常连续系统可观测性的判别准则定理4.6:(可观测性判别准则Ⅰ)线性定常连续系统Bu Ax x += ,cx y =,其状态完全可观测的充分必要条件是:由A 、C 构成的可观测性判别矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=-1n o cA cA c Q 满秩,即n rankQ o =【例4.5.1】判别可观测性(1)u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=110154 ,[]x y 11-=(2)u x x⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--=113112 ,x y ⎥⎦⎤⎢⎣⎡-=0101说明: 在定义中之所以把可观测性规定为对初始状态的确定,这是因为一旦确定了初始状态,便可根据给定输入,利用状态方程的解 ⎰-+-=tt d Bu t t x t t t x 0)()()()()(00τττφφ 就可以求出各个瞬间状态。
(3)u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=111001 ,[]x y 11= 解:(1)⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=5511cA c Q o ,21<=o rankQ ,故系统是不可观测的。
(2)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎦⎤⎢⎣⎡=12120101cA c Q o ,22==o rankQ ,故系统是可观测的。
(3)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=1111cA c Q o ,21<=o rankQ ,故系统是不可观测的。
定理4.7:(可观测性判别准则Ⅱ)设线性定常连续系统Bu Ax x+= ,cx y =,A 阵具有互不相同的特征值,则其状态完全可观测的充分必要条件是系统经非奇异变换后的对角标准型u B x x n +⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=λλ001, x c y = 中的矩阵c 中不含元素全为零的列。
4.系统的可控可观性
和不可控状态空间。
因此,系统的可控性是刻画系统的结构性质,与系 统的具体输入u无关。
说明2: 可控性分为状态可控性和输出可控性,若 不特别指明,一般指状态可控性。状态可控性只与 状态方程有关,与输出方程无关。 说明3:等价定义于若给定系统的一个初始状态可为
x(t0 )
t0可以为 0 ,如果在的有限时间区间 t0 , t1内,
若输入矩阵中B3≠0,则 输入u (t)对状态变量x3 有直接的控制作用。此 时,即使中其他行的元 素全为0,即B1=0和B2=0,源自uB1
x1
B2
x2
输入u (t)对状态变量x1和
x2也可以通过状态变量x3 产生间接的控制作用。
B3
x3
因此,只要B3≠0 ,输入
u (t)对各状态变量都有 控制作用。
解:
4.1.4 系统的可观性概念 如果系统所有的状态变量任意形式的运动均可由 有限时间的输出测量完全确定出来,则称系统是可观
测的,简称为系统可观测;反之,则称系统是不完全
可观测的,简称为系统不可观测。
提示:号脉
在下面讨论能观测性条件时,我们将只考虑零输
入系统。这是因为,状态能否被观测,与有没有输入
At o
由于矩阵A、B、C和D均为已知,u(t)也已知,所 以上式右端的最后两项为已知,因而它们可以从被量
测值y(t)中消去。因此,为研究能观测性的充要条件,
只考虑式零输入系统就可以了。
4.1.5 系统的可观性判据 判据一:考虑下式所描述的线性定常系统。
Ax x y Cx
其输出向量为
y(t ) Ce At x(0)
线性系统理论第4章线性系统的能控性和能观测性
CA
n 1
满秩,即rankQ o=n
n 维连续时间线性时不变系统完全能观测的充分必要条件为:
rank
SI C
A
n
S C
或
rank
i
C
I
A
n
, 1, 2 ,n
为系统特征值
结论6:n维连续时间线性时不变系统完全能观测的充分必要条件为:矩阵A不 存在与C所有行正交的非零右特征向量,即对矩阵A所有特征值,使同时满足
如果对初始时刻h和任意非零状态Xl,都存在时刻l∈Jk,l>h和对应输入u(k),使输 入作用下由初始状态X(h)=0出发的系统运动在时刻l∈Jk达到Xl,则称系统在时刻 h完全能达。
结论1 离散时间线性时变系统在时刻h完全能达的充分必要条件为,存在时刻 l∈Jk,l>h,使格兰姆矩阵
A i ,C 0 的右特征向量 0
3/5,14/45
结论7:对n维连续时间线性时不变系统,若A为对角阵,且其特征值两两相异,系 统完全能观测的充分必要条件是C阵中不包含零列向量。 结论8:对n维连续时间线性时不变系统,若A为约当阵,系统完全能观测的充分
必要条件是:
①特征值互异的约当块第一列对应的C阵中,该列元素不全为零。 ②特征值相同的约当块第一列对应的C阵中,各列向量线性无关。
t1
t0
(t1
,
)
B(
)u(
)d
(t1,t0 )x(t0 )
t1
t0
(t1
,
)
B(
)
BT
(
)
T
(t0
,
)W
1
(t0
,
t1
)
x(t0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
和不可控状态空间。
因此,系统的可控性是刻画系统的结构性质,与系 统的具体输入u无关。
说明2: 可控性分为状态可控性和输出可控性,若 不特别指明,一般指状态可控性。状态可控性只与 状态方程有关,与输出方程无关。 说明3:等价定义于若给定系统的一个初始状态可为
x(t0 ) t0可以为 0 ,如果在的有限时间区间t0 , t1 内,
的子系统并联。 输入u(t)对状态变 量 xi是否有控制作用 取决于输入矩阵B中 第i行的元素是否不 全为0,即是否 Bi 0
Bn
1
B2
x2
2
xn
n
如果矩阵A不具有互异的特征向量,则不能将其化为对 角线形式。在这种情况下,可将A化为Jordan标准形。
若输入矩阵中B3≠0,则 输入u (t)对状态变量x3 有直接的控制作用。此 时,即使中其他行的元 素全为0,即B1=0和B2=0,
第4章控制系统的可控性和可观测性
在经典控制理论中,着眼点在于研究对系统输出
的控制。对于一个单输入—单输出系统来说,系统的
输出量既是被控量,又是观测量。因此,输出量明显 地受输人信号控制,同时,也能观测,即系统不存在 能控、不能控和能观测、不能观测的问题。现代控制 理论着眼点在于研究系统状态的控制和观测。这时就 遇到系统的能控性和能观测性问题了。可控性、可观 性与稳定性是现代控制系统的三大基本特性。
由于:
1 1 det U det [ B AB] 0 0 0
即U为奇异,所以该系统是状态不能控的。
例4-2 考虑由下式确定的系统:
1 1 1 x1 0 x u x 2 2 1 x2 1
由于:
det U det [ B AB]
4.1 可控性和可观测性
4.1.1 系统的可控性概念 如果系统所有状态变量的运动都可以通过有限 点的控制输入来使其由任意的初态达到任意设定的
终态,则称系统是可控的,更确切的说是状态可控
的;否则,就称系统是不完全可控的,简称为系统 不可控。
说明1: 系统在时刻 t 的运动状态是由n个状态变量综 合描述的。系统可控就意味着这n个状态变量都必须与 系统的控制输入存在确定的联系,如果有一个或部分状 态变量不接受输入控制,就称系统是不可控的,或称系 统是部分可控。这样系统状态空间就分为可控状态空间
u
B1
x1
B2
x2
输入u (t)对状态变量x1和
x2也可以通过状态变量x3 产生间接的控制作用。
B3
x3Βιβλιοθήκη 因此,只要B3≠0 ,输入
u (t)对各状态变量都有 控制作用。
例4-3 下列系统是状态能控的:
1 1 x x 2 0
1 1 x x 2 0 3 0 x 1 2 x x 2 0 x 3 0 4 x x5 0 1
提示:说明3+说明4=任意位置 到任意位置
时变系统y可以用格拉姆矩阵 判断,充要条件。复杂。
4.1.2 系统状态的可控性判据 判据一:若线性定常系统状态方程 x(t ) Ax(t ) Bu
能控,则能控性矩阵
满秩。即
U B
AB
A2 B
...
An1B
rank(U) n
反之也成立。
1 5
下列系统是不能控的:
1 1 x x 2 0 1 1 x x 2 0 3 0 x 1 2 x x 2 0 x 3 0 4 x x 0 5 0 x1 2 u 2 x2 0 1 1 0 1 2 0 0 x1 4 x 0 0 2 2 3 x3 0 1 2 5 0 2 u1 0 u2 0 0 x1 4 x 2 2 x3 1 u 1 x4 3 0 5 x5
判据一的证明从略,结合具体例子介绍其方法。 能控性矩阵的秩称为系统的能控性指数,表示 系统的能控状态变量的个数。
其它充要判据等价从略
例4-1 考虑由下式确定的系统:
x1 1 1 x1 1 x 0 1 x 0 u 2 2
存在控制 u(t ) 使 x(t1 ) 0 ,则称系统状态在 t 0 时刻是
能控的;如果系统对任意一个初始状态都能控,则
称系统是状态完全能控的。
说明4:如果在时间区间 t0 , t1 内存在控制 u(t ) ,使
系统从状态空间坐标原点 x(t0 ) 0 推向预先指定的
状态x(t1 ),则称为状态能达性。可以证明系统能控性 与能达性是等价的。
0
1
1 1
0
即U为非奇异,所以该系统是状态能控的。
判据二:如果A的特征向量互不相同,则经过线性变 换将A阵转换为对角阵后,系统可控的充要条件是转 换后的状态方程:
其输入矩阵 没有一行的所有元素均为零。
每一个方程都有 u参与
可见,系统各状态变 量之间没有耦合关系,
u
B1
x1
系统相当于n个独立
0 x1 2 u 2 x2 5
1 0 1 2 0 0 x1 0 x 4 u 0 2 2 3 x3 0 1 2 5 0 0 x1 0 x 0 2 x3 3 x 4 0 2 x5 1 0 u 0 1 u 2 0 1