运用三次样条曲线拟合机器人运动路径
运用三次样条曲线拟合机器人运动路径_王金敏
i+ 1 i+ 1
)
2
y
i
+
(1-
2
xx i+ 1
x -
i+ 1
xi
)
(
x
x
i+
-x 1-
i
xi
)
2
y i+
1
+
(x -
x
i
)
(
x x
i
-
xi+ 1 x i+ 1
)
2
mi
+
(x-
x
i+
1
)
(
x
x
i+
-
1
x -
i
x
i
)
2
m i+
1
记相邻点的坐标值之差为 hi , 则 hi = x i+ 1 - x i , 由上式得:
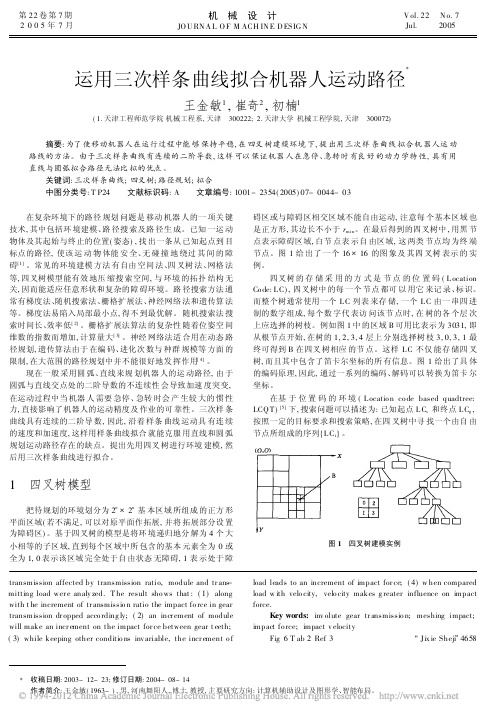
碍区或与障碍区相交区域不能自由运动, 注意每 个基本区域 也 是正方形, 其边长不小于 rmin。在最后得到的四叉树中 , 用黑 节 点表示障碍区域, 白节 点表 示自 由区域, 这 两类 节点均 为终 端 节点。图 1 给 出了 一个 16 16 的图 象及 其四 叉树 表示 的 实 例。
四叉树 的 存 储 采 用 的 方 式 是 节 点 的 位 置 码 ( L ocation Co de: L C) , 四叉树中 的每 一个 节点 都可 以 用它 来记 录、标识。 而整个树通常使用一个 L C 列表 来存 储, 一个 L C 由一 串四 进 制的数字组成, 每个数 字代 表访 问该节 点时, 在 树的各 个层 次 上应选择的树枝。例如图 1 中 的区域 B 可用比表示为 3031, 即 从根节点开始, 在树的 1, 2, 3, 4 层上 分别选择树 枝 3, 0, 3, 1 最 终可得到 B 在四叉 树相应 的节 点。这样 L C 不仅 能存 储四 叉 树, 而且其中包含了笛卡尔坐标的所 有信息。图 1 给出了具 体 的编码原理, 因此, 通过一系列的编码、解码可以 转换为笛卡 尔 坐标。
三次样条插值方法在Nao机器人步态规划中的应用
三次样条插值方法在Nao机器人步态规划中的应用黄春林;张祺;杨宜民【摘要】以仿真Nao机器人为研究对象,将三次样条插值方法应用到其步态规划中,根据关键时刻主要节点位姿规划整个步态周期各关节的运动规迹,首先分析了Nao机器人行走过程,获取步态周期中关键时刻的位姿;然后构造三次样条插值函数,对Nan机器人步态进行规划,保征了机器人步态的平滑性:最后通过RoboCup3D 仿真平台验证了方法的自效性.【期刊名称】《机电工程技术》【年(卷),期】2011(040)002【总页数】3页(P62-64)【关键词】Nao机器人;步态规划;三次样条插值【作者】黄春林;张祺;杨宜民【作者单位】广东工业大学自动化学院,广东广州,510090;广东工业大学自动化学院,广东广州,510090;广东工业大学自动化学院,广东广州,510090【正文语种】中文【中图分类】D241.31 引言双足机器人在各个领域的应用日趋广泛,其步态规划的稳定性已成为研究热点。
步态规划是机器人稳定步行的基础,它的目标是产生期望步态,即产生实现某种步态的各关节期望运动轨迹[1];规划步态的平滑性直接影响到双足机器人步行控制的稳定性。
采用多项式拟合方法规划的步态存在阶次过高而出现振荡的问题[2]。
三次样条插值算法能保证插值点两侧轨迹的连续性[3],具有稳定性和平滑性,已应用于机器人步态规划中。
本文以仿真Nao机器人为研究对象,将三次样条插值方法应用到其步态规划中,根据关键时刻主要节点位姿规划整个步态周期各关节的运动轨迹。
2 Nao机器人步行过程分析Nao机器人是由法国Aldebaran Robo-ticsTM公司研制的双足机器人,具有25自由度。
2004年诞生的RoboCup仿真组(3D)项目server目前采用的Agent即是仿真Nao机器人。
Nao机器人下肢关节具有12自由度,其髋、膝、踝关节分别为3、1、2自由度,左右对称。
Nao机器人的步行过程如图1所示以周期性重复方式不断前进。
Hermite三次样条插值的车型机器人路径规划研究
成在 障碍 环境下的导航 。 许多的研 究者将车型机器 人视为一个 在平面 上移 动的三 维 系统 , 受无 滑动滚动 的非 完整约 束和 曲率 的约束 。其最 它 短路径 长度 由圆弧和 直线这两个几 何部分 的有 限序列组成 n 。 但 这两部 分的 曲率是 不连续 的 , 如果 要沿着 这样 一条路径 移
Emalp 2 1 16 ia o — i:h 9 0 1 @s . m nc
PEN G H ui ZEN G Bi e e c 。 . s ar h o pa h R f t pl nn ng o ve ce lke obo o a i f r hi l—i r t n H e m ie ubi s i sCom pu e Eng ne rng r t c c plne . tr i ei
s oo h m t pah t ba e o s d n He m ie ubi s i sA nd he r t c c plne . t m eho t d t ie ai el op i ie he o tr tv y tm z t pah s lo x un d n h s a r t i a s e po de i t i p pe .
1 引言
运动模型 的路径规划 已广泛应用于 机器人 、 人工智 能、 虚
拟 现实 等领域 。要实 现约束 条件 下的 路径规 划 , 也就是 通过 规 划和控 动轨 迹 , 来完
下, 能够 直接地连续计算 出可行的路径是至关 重要 的 。 为找到适 合非完整 约束 的车 型机器人穿越 动态环境 的可 行 路径 , 出了一 种基于 Hemi 三次样条 的基 线平滑路径 的 提 r t e 实 用方 法 。它考虑 到机器 人 的约束条 件 , 通过 调整和 弯 曲样 条 来实现避 障。这种方 法可 以对 路径 进行反复 完善来更直接 计 算 出一条 可行 的路径 , 最终查 找到 一条适 合于 非结构化 并
基于三次B样条曲线拟合的智能车轨迹跟踪算法
D O I:10.11772/j .issn.1001-9081.2017102563
基于三次B 样条曲线拟合的智能车轨迹跟踪算法
张永华、杜 煜 2' 潘 峰 2, 魏 岳 3 ( 1 .北京联合大学智慧城市学院,北 京 100101; 2 . 北京联合大学机器人学院,北 京 100101;
3 . 保定学院物理与电子工程系,河 北 保 定 071000) ( * 通信作者电子邮箱duyu@ buu. edu. cn)
关键词 :智能车;轨迹跟踪算法; 三 次 B 样条曲线拟合;切向角
中图分类号:TP301.6 文献标志码:A
Intelligent vehicle path tracking algorithm based on cubic B-spline curve fltting
ZHANG Yonghua1, DU Yu2% PAN Feng2, WEI Yue3
摘 要 :针对传统几何轨迹跟踪算法切向角获取依赖高精度惯导设备的问题,提 出 了 基 于 三 次 B 样条曲线拟合
的轨迹跟踪算法。首 先 ,通过对先验地图中的离散轨迹点进行拟合生成平滑轨迹线;然 后 ,根据轨迹方程通过插值法
重新生成离散路点,并计算各个路点处的切向角,从 而 实 现 了 对 多 传 感 器 融 合 轨 迹 的 优 化 与 跟 踪 。在真实的智能车 实验平台上,用所提算法对20 k m /h 低 速 绕 圈 和 60 k m /h 较高速度直道两种典型场景进行了在真实道路下的跟踪测 试 。在低速大曲率和较高速度直道两种典型场景下,所提算法轨迹跟踪的最大横向误差均保持在0.3 m 以内。 实验 结 果 表 明 ,该 算 法 有 效 解 决 了 传 统 几 何 轨 迹 跟 踪 算 法 对 惯 导 设 备 依 赖 的 问 题 ,同 时 保 持 了 较 好 的 跟 踪 性 能 。
三次样条插值在机器人轨迹规划应用中的改进研究

4 在机器人轨迹规划中的应用
本文以 KUKA240-2 型机器人在点焊过程中的应用为例, 首 先由机器人运动学的逆解求出机器人在各焊接点处个关节的角
机械设计与制造 Machinery Design & Manufacture
第9期 2008 年 9 月
三次样条插值在机器人轨迹规划应用中的改进研究
张小江 高秀华 (吉林大学 机械科学与工程学院, 长春 130022 )
The research on the cubic splines in robot’ s trajectory planning
Mi+1 进行线性插值, 得到: ( t ) i+1 - t i S( ″ t) Mi +(t - t) Mi+1 i = 6hi 6hi 其中, hi =ti +1-ti
(1 )
对式 (1 ) 的 S( ″ t ) 表达式连续进行积分两次, 并利用插值条件 S (t) (t) (ti+1 ) =θ (ti+1 ) 可确定积分过程中的两个积分常数, 整 i =θ i 及 S 理后用 Mi 表示的在区间 [ti, ti+1] 的S (t ) 的公式为: ( t t ) ( t t ) i S (t ) = i+1 Mi + Mi+1 6hi 6hi Mihi ti +1-t + Mi +1hi t-ti + θ (2 ) (t) θ (ti+1 ) i hi hi 6hi 6hi ) 可以看出, 只要求出公式中的 Mi 的值, S (t ) 便可以 从式 (2 (t ) 的问题转化为求 n+1 完全确定, 这样就将三次样条插值函数 S 个未知数 Mi 的问题。 对式 (2 ) 的S (t ) 进行求导得: 2 2 ( t t ) (ti +1 ) -θ (t) i i S( ′ t ) = i +1 Mi +(t -t) Mi +1+ θ - Mi +1-Mi (3 ) 2 hi 2 hi hi 6 ′ t ) 在节点上的连续性条件: S( ′ ti -0 ) =S( ′ ti +0 ) 由角速度 S( 得到: hi+1 M + hi M + θ (t) (ti-1 )=- hi M - hi M + θ (ti+1 ) -θ (t) i -θ i i+1 i i i+1 6 6 hi-1 3 6 hi 整理得: μi Mi-1+2Mi+λiMi+1=di (4 ) h h i-1 i 令 μi = λi = hi-1+hi hi-1+hi θ (t) (ti-1 )- θ (ti+1 ) -θ (t) i -θ i ti+1-ti t-ti-1 di =6 =6θ [ti-1, ti, ti+1] hi-1+hi 上式方程组中含有 n+1 个未知数 M0、 M1……Mn, 而上式方程 要求出 M0、 M1……Mn, 还必须加两个约束条件, 组有 n-1 个等式,
基于三次非均匀B样条曲线的机器人轨迹规划算法研究
等 j , 提出了 N U R B S曲线 S形 加 减 速 双 向 寻优 插 补算法 , 针 对 减 速 点 难 以预 测 的 问题 , 将 曲线 末 端
减 速段 转化成 反 向加 速 段 , 同时 把 正反 向插 补 点进
[ 2 0 1 1 ] 8 6 9 号) 、 四川 省教育厅青年基金 ( 1 0 z d l 1 3 5 ) 资助
第一作者简介 :赖永林 ( 1 9 8 8 一) , 男, 西南 科技大学 硕士研究 生 , 研 究方 向: 机器人技术 。E — m a i l : l a i y o n g l i n 6 @1 2 6 . 1 2 0 1 1 1 。
行 拼接 而完成 整个 插 补 过 程 , 虽 然 能够 解 决 减 速 预 测 问题 , 但是算 法 繁 琐 , 拼 接 时处 理 复 杂 , 不 能进 行
实 时插补 。而如果 已知 曲线 长 度 的前 提下 , 根 据速
线 引入到 了机 器人 轨 迹 规划 中 , 例如, 陈伟 华 , 等 J
直线或圆弧来拟合代替。不过 , 这种方法不仅编程 效率低 、 计算量大 , 而且 对于一些 自由曲线将带来 较大的拟合误差 , 难 以达 到理 想精度。因此 , 研究
机 器人 的 自由曲线 插 补算 法是非 常有 必要 的。 在 自由曲线轨 迹 规 划 中 , 尤 其 以 B样 条 曲线 的
点, 通 过 曲线反算求 出原 曲线。针对 曲线速度规划 中减速 点难 以预测 的问题 , 提 出以复合柯特 斯公 式进 行 曲线积分 , 求 出曲
线长度 ; 并通过 曲线反 向拟合 , 将机器人运行位 移实 时地 转化为插 补点。 同时为 了减 小震荡 , 利用 曲率极值 点对 曲线进行 了 分段速度规划 , 从而达到在 曲率极值点处进行减速 的 目的。最后 , 通过一个仿真实例, 证 明了该算法 的有效性。
三次均匀B样条在工业机器人轨迹规划中的应用研究
通 过所 有 的 型值 点 ; 机 器 人 末 端 的 速 度 经 过 了加
速、 匀速、 减 速 的平稳 变化 过程 。
用作业如搬运 、 码垛 、 点焊 等作业 中, 用上述三种轨
迹 的组合 就 能 实 现 基 本 的 任 务 要 求 。随 着 工 业 机
1 位 姿描 述 J
机器人末端的位姿由齐次变换矩阵 : 描述, 它
2 . 2 反 算控 制点
四元数的“ 四元数球面线性插值方法” 进行规划 。
量和 四元 素 这 四种 方 式 描 述 姿 态 , 进 行讨论 , 姿 态 轨迹 可 以用姿 态 四元 数 的 “ 四元 数 球 面 线性 插 值 方
科
学
技
术
与
工
程
1 3卷
法” 进 行 规 划 。这 四 种 表 示 方 法 是 等 效 的 , 它 们
式( 2 ) 中 t∈ [ 0 , 凡一1 ]为全局 参变 量 , 为式 ( 1 )
研 究三次均匀 B样条 曲线拟合方 法在 工业机器 入轨迹规划算 法中的应用 , 目的是使机 器人末 端 以三次 B样条 的 曲线轨迹通
工件上各加工点。首先 , 分 析三次均匀 B样条 曲线 的特性 , 给 出了三次均匀 B样条 曲线 的表达 武。然 后, 在增 加 曲线 自由端 点条件后、 使用追赶 算法快速 反算 出控制点 ; 使用 预估校 正 的方法 对速度进 行规 划 , 使机 器人 末端速度 以梯形 加减速 规律 变 化。最后 , 以国产某 型号工业机 器人为本体 , 对所提 算法进行仿真验 证 , 给 出 了该 型机器 人 的关节连杆 模型和 D - H参数 。仿
其 子矩 阵
nx 0
x
基于三次b样条曲线轨迹优化代码
基于三次B样条曲线轨迹优化代码一、引言本文将讨论基于三次B样条曲线的轨迹优化代码。
首先,我们将介绍三次B样条曲线的基本原理和特点。
然后,我们将探讨如何使用三次B样条曲线来进行轨迹优化。
最后,我们将介绍一些实际案例,展示三次B样条曲线轨迹优化的应用。
二、三次B样条曲线的基本原理和特点2.1 三次B样条曲线的定义三次B样条曲线是一种参数化曲线,它由一系列的控制点和节点向量定义。
节点向量是一个非递减的序列,控制点则决定了曲线的形状。
2.2 三次B样条曲线的特点三次B样条曲线具有以下特点: - 局部控制性: 三次B样条曲线的形状仅由其局部的控制点决定,不受其他点的影响。
这使得我们可以在不改变整体形状的情况下进行局部编辑。
- 光滑性: 三次B样条曲线在连接点处具有连续的一阶和二阶导数,因此曲线较为平滑。
- 灵活性: 通过调整控制点的位置,我们可以改变曲线的形状和弯曲程度。
这使得三次B样条曲线成为了一种强大的曲线表示方法。
三、使用三次B样条曲线进行轨迹优化3.1 轨迹优化的目标轨迹优化的目标是找到一个满足特定条件的最佳路径。
在机器人控制和动画制作中,轨迹优化通常用于生成平滑且效果良好的运动轨迹。
使用三次B样条曲线进行轨迹优化可以帮助我们实现这一目标。
3.2 轨迹优化算法轨迹优化算法的基本思路是通过调整控制点的位置来改变曲线的形状,以满足特定的优化目标。
常见的轨迹优化算法包括梯度下降、遗传算法等。
使用三次B样条曲线进行轨迹优化的步骤如下: 1. 定义问题:明确轨迹优化的目标和约束条件。
2. 初始化控制点:在给定的曲线上选择一些初始控制点。
3. 计算误差:根据优化目标和约束条件,计算出当前轨迹的误差。
4. 更新控制点:使用优化算法调整控制点的位置,以减小轨迹的误差。
5. 重复步骤3和4,直到达到预设的收敛条件。
3.3 轨迹优化的应用轨迹优化在许多领域都有广泛的应用,包括机器人控制、动画制作、计算机辅助设计等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运用三次样条曲线拟合机器人运动路径
王金敏;崔奇;初楠
【期刊名称】《机械设计》
【年(卷),期】2005(22)7
【摘要】为了使移动机器人在运行过程中能够保持平稳,在四叉树建模环境下,提出用三次样条曲线拟合机器人运动路线的方法。
由于三次样条曲线有连续的二阶导数,这样可以保证机器人在急停、急转时有良好的动力学特性,具有用直线与圆弧拟合路径无法比拟的优点。
【总页数】3页(P44-46)
【关键词】三次样条曲线;四叉树;路径规划;拟合
【作者】王金敏;崔奇;初楠
【作者单位】天津工程师范学院机械工程系;天津大学机械工程学院
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于样条逼近与曲线拟合的欠驱动仿生机器人运动规划 [J], 厉虹;张甜
2.Hermite三次样条插值的车型机器人路径规划研究 [J], 彭辉;曾碧
3.基于三次Bézier三角样条插值的工业机器人连续路径轨迹规划 [J], 靳岚;赵莉;谢黎明
4.基于三次参数样条的机器人路径平滑算法研究 [J], 乔亮;李泽文;胡杰;李照祥
5.基于改进蝙蝠算法和三次样条插值的机器人路径规划 [J], 刘景森;吉宏远;李煜因版权原因,仅展示原文概要,查看原文内容请购买。