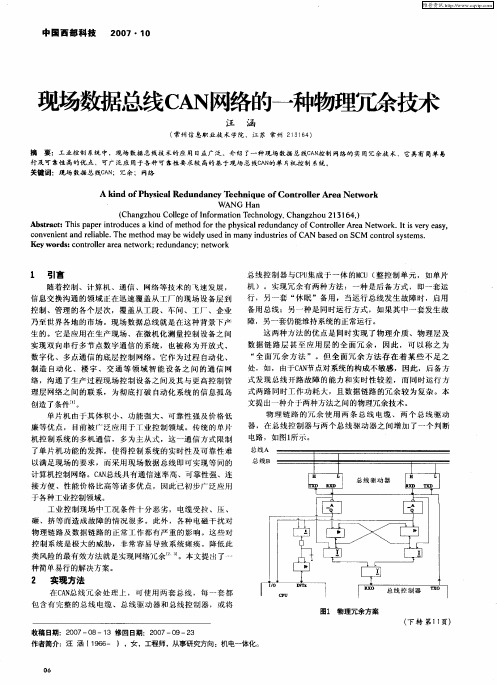
基于CAN总线的冗余系统方案
现场数据总线CAN网络的—种物理冗余技术
信 息交换沟通 的领域正在 迅速覆盖 从工厂 的现场 设备层 到 控制 、管理 的各 个层次 ,覆盖从工段 、车 间、工厂 、企 业 乃 至世界各地 的市场 。现场 数据总 线就是在这 种背景下 产 生的。它是应用 在生产现 场、在微 机化测量控 制设备之 间 实现 双 向串行 多节点数字 通信 的系统 ,也被称 为开放式 、 数字化 、多 点通 信的底层 控制 网络 。它作 为过 程 自动化 、 制造 自动 化 、楼 宇 、交 通等 领 域智 能 设备 之 间的通 信 网 络,沟通 了生产 过程现场 控制 设备之 间及其 与更高控 制管
种简单易行的解决方案。
砸 、挤 等 而 造 成 故 障 的情 况 很 多 。 此 外 ,各 种 电磁 干 扰 对 物 理链 路 及 数 据 链 路 的 正 常 工 作 都 有 严 重 的 影 响 。这 些 对
控 制 系 统 是 极 大 的 威 胁 , 非 常 容 易 导 致 系 统 瘫 痪 。 降低 此
类 风 险 的最 有 效 方 法 就 是 实 现 网络 r 余 。本 文提 出 了 一 几 、
. .
Ke ywor s c n r l ra e ewo k rdu d n y n t o k d : o tol r an t r ; e n a c ; e e w r
l 引言
随着 控 制 、计 算 机 、通 信 、 网络 等 技 术 的 飞 速 发 展 ,
总线控 制器与C U P 集成 于一体 的M U ( C 整控 制单 元,如单片
机控制 系统 的多机通 信, 多为主从式 ,这 一通信方 式限制 了单片机功 能的发挥 ,使得控 制系统 的实时性 及可 靠性难
基于CAN总线的RS485冗余网关设计与实现

De i n a d i p e e t f 4 5 r d n a t a e y b s d o sg n m lm n o RS 8 e u d n t wa a e n CAN u g b s
的一 个重要 发展方 向 。同时 , S 8 R 4 5总线经过 多年 的发
片机 的选择上要求运行可靠性 高 、 功耗低 , 要具有较强 的
实时处理能力 。考虑 到本 系统具体使用环境及对 实时性 的要 求 ,设 计 中选 用 了 SL B IA S公 司 的 8位微 控 制器
C 0 10 0和 M X U 85 F 4 A I M公 司生产 的 M X18 A 4 0型光 电隔
g t wa . ae y
Ke r s AN— S 8 ;r d n a c ;g tw y c mmu iain y wo d :C R 4 5 e u d n y ae a ; o nc t o
O 引言
近年来 , 地铁列车 网络技 术得到 了迅速 的发展 , 中 其 基于 C N总线 的列车 网络 凭借 自身开放性 好 ,可 靠性 A 高 、 活性强 、 时性高 的特 点 , 灵 实 成为地 铁列车 网络 技术
sb a , n e S 8 u sdwd l T i ppr e id ec bs ed s np nil adteraztn oes f e u w y adt nR 4 5bsiue ie . hs ae t l l d sr e t ei r cp n l ao cs h s y d ae y i h g i e h ei i y ot h
冗余CAN总线高可用计算机系统设计与实现
-
7 8・
微
处
理
机
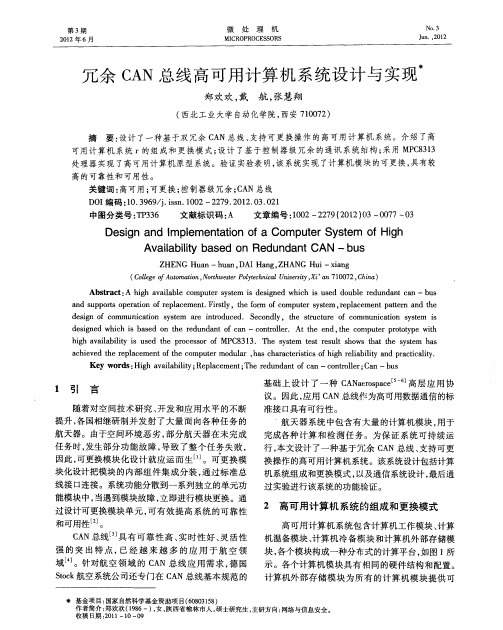
靠、 持久 的外 部存储 能力 。 各个 模 块 之 间通 过 C N A
总线 进行 命令 和数 据交互 。
图 1 高 司用 计 算 机 系统 的 组 成
计算机模块的定义如下 : ①计算机工作模块 : 处 于工作状态 的计算机模块 , 执行一定的任务 ; ②计算 机温备模块: 指处于待命状态的计算机模块 , 该模块 在逻辑上与整个系统断开 。温备模块中存在一个系 统后台任务 , 只接 收特定 的指令 ; ③计算机 冷备模 块: 指处于断电状态的计算机模块 , 该模块未上电加 载软件系统 , 在物理上与整个系统断开。
C N控 制器 采用 P ip 公 司独立 的 C N总 线 A hl s i A
整个可更换计算机系统中的节点在监控节点的 控制 下进 行调 度 和状 态 转 换 。应 该 说 明 , 控 节点 监 并不属于中心控制节点 , 只是一个分布式节点 , 执行 系统监控的任务。为 了增 强系统 的可靠性 , 可能有 多个 节点 同时执 行监 控任 务 。
3 基于冗余 C N总线 的通信 系统设计 A
3 1 基 于控制 器级 的 冗余 C N 总线 结构 . A
典 型的 C N总线 电路 可分 为 3个环 节 , A 即微 处
3 期
郑欢 欢等 : 冗余 C N总线高可用计算机系统设计与实现 A
・7 9・
支 持更换 过 程 的 热 插 拔 控 制 器 是 Mai 公 司 xm 的 M X 2 1它采 用 了集 成 限 流方 案 , 化 了浪 涌 A 47 , 简
C N总线 具 有 可靠 性 高 、 时 性 好 、 活 性 A 实 灵 强 的 突 出 特 点 , 经 越 来 越 多 的 应 用 于 航 空 领 已 域 。针对航 空 领 域 的 C N 总 线 应 用 需 求 , 国 A 德 Sok航空 系统 公 司还专 门在 C N总 线基 本 规范 的 tc A
双冗余CAN总线设计及可靠性分析

双冗余网络在励磁装置中的应用及可靠性分析李志军杨彦杰(河北工业大学, 天津300130 )摘要:为了保证励磁装置的通讯可靠性,本文基于CAN总线的相关理论和技术特点,提出了一种双冗余容错的CAN网络设计理念,采用双模冗余结构同时运行的设计方案,对总线控制器、驱动器、传输介质进行了全面冗余。
设计了基于dsPIC 30F6014的带冗余CAN通道的节点硬件部分和适合于励磁装置的CAN总线应用层协议,编制了相关的通讯程序。
并分别对单通道CAN和双冗余CAN网络拓扑结构进行了可靠性分析。
最后,通过试验验证了冗余总线设计方案的可行性和可靠性。
关键词:励磁装置,可靠性,双冗余通讯,CAN网络,dsPIC中图分类号:TM712 文献标识码:文章编号:1.说明励磁控制装置是同步发电机的一个重要组成部分,其主要作用是维持发电机端电压处于给定水平。
一般由励磁调节单元、励磁功率单元、灭磁保护单元三部分构成[1]。
数字式励磁装置中的每个单元的核心处理工作都由微处理器来完成,在系统运行期间,需要在各个单元之间传递模拟量、开关量以及可修改的参数等数据信息。
因此需要通过为每一个单元集成 CAN 通讯接口并将各个接口连接成一个现场总线网络的设计方案,来实现各单元之间数据的实时传输和通讯。
虽然CAN协议自身有比较强的检错和纠错能力,但是在工业控制现场的复杂环境中,机械和电磁的噪声等都会影响CAN总线的可靠通信,进而使得系统的整体可靠性大大降低[2],解决这个问题的有效办法是采取冗余设计。
为了提升CAN总线在励磁控制系统中通讯的可靠性,本篇论文介绍了一种基于dsPIC[3]的双路CAN总线冗余通讯设计方案,并进行了可靠性分析。
2.冗余通讯系统的设计方案和硬件实现冗余设计一般包括部分冗余和全面冗余方法[4]。
由于部分冗余设计通常仅实现了物理介质和物理层的冗余,CAN总线通信的实时性和可靠性仍不能得到有效保证。
全面冗余方法对传输介质、数据链路层及物理层甚至是应用层都进行了全面的冗余,因此可以大幅度提升系统的可靠性。
基于CAN总线的冗余系统同步技术研究

孔凡立等
2 0 1 3 年 3月第 4 4卷第 1 期 ( 总第 1 5 1 期)
基于 C A N总线的冗余系统同步技术研究
孔凡立 ,黄金 泉
( 南京航 空航天大学, 南京 2 1 0 0 1 6 )
[ 摘 要 ] 为了解决 自动油 门伺服控制 器冗余 系统 中双 C P U 时钟 不同步导致 的系统工作 不稳 定 问题 ,本文提 出了一种 改进 的同步技术 , 该技术通过 C A N总线通信 , 基于P YP协议进行信 息交互 ,实现双 C P U的时钟 同步。 通过开发试验板进行验证 测试 ,测试结果表 明,该技术可 以有 效地解 决冗余 系统 同步 问题 ,同步后的 时钟误差
( Na n j i n g U n i v e r s i t y o f Ae r o n a u t i c s a n d As t r o n a u t i c s , N a n j i n g 2 1 0 0 1 6 , C h i n a )
A bs t r a c t : I n a r e d u n d a nc y s ys t e m ,d o u bl e CP U c l o c k o u t - s y n c ma y l e a d t o t h e p r o b l e m o f u ns t a b l e o pe r  ̄i o n, i n
The Sy nc hr 0 ni z a t i 0 n Te c hn i que s f o r Re du nda nc y Ar c hi t e c t ur e
Ba s e d o n CAN Bus
KONG Fa n— l i , HUANG J i n— q u a n
基于CAN核的四冗余通信板设计与仿真

( h c nd A rilr gie rn n tt e,Xia 0 5,Chi ) T e Se o tl y En n e i g I s iut e ’n 71 02 na
Absr c :Thet a s ison r t n ve alpe f r a e ofbu o m u cto oa d o he m a ke s po r A CA N c e i sgn d ta t r n m s i a e a d o r l ro m nc s c m nia in b r n t r ti o . or s de i e
基 于 C N 核 的 四 冗 余 通 信 板 设 计 与 仿 真 A
徐 军涛 ,许 化 龙
( 二 炮兵 工 程 学 院 ,西 安 7 0 2 ) 第 1 0 5
摘 要 :针 对市 场 上 的 总 线通 信 板 实 际传 输 速 率 低和 综 合 性 能 不 高的 问题 , 出 了 一种 弄 用 F GA设 计 C 提 l 3 P AN 核 , 在 此 并
基 础 上进 行 C AN通 信 板 的 设 计 。该 通 信 板 完 成 P 1 4与 CAN 总 线通 信 , 有 “ 光 双 电” 四 冗 余 设 计 。 详 细 介 绍 C/ 0 具 双 的
了C AN 核 的 设 计 、 AN 通信 板 的 硬件 设计 及 软 件 设 计 , 利 用 Mo es 对设 计 进 行 系统 仿 真 。 该 CAN 通 信板 具 有 高 C 并 d li m
速 、 可靠 的 特 点 , 通 信 速度 、 码 率 、 靠性 等 指 标 均达 到 了设 计要 求 。 高 其 误 可
关 键词 : P F GA;P / 0 ;C C l 4 AN 总 线 ;C AN 核 ;仿 真 ;冗 余
基于CAN总线的双通道冗余无刷直流电动机控制系统
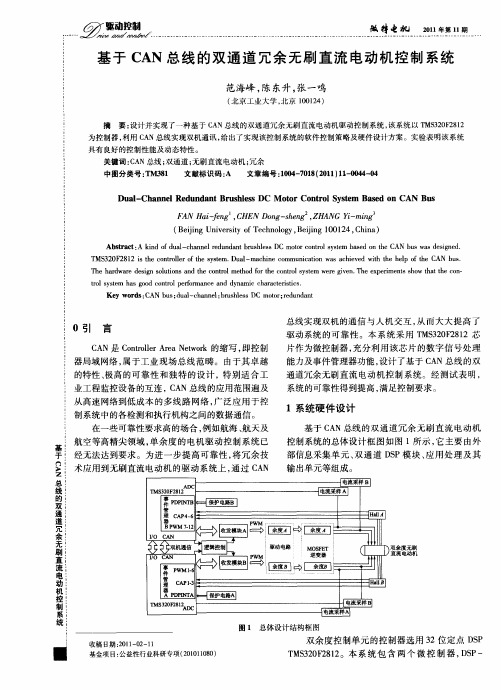
具有 良好 的控制性能及动态特性 。
关键词 : A C N总线 ; 双通 道 ; 无刷直流 电动机 ; 冗余
中图分 类号 : M3 1 T 8 文献标识码 : A 文章编号 :0 4 7 1 (0 1 1 — o 4 o 1 0 - 08 2 1 ) 1 0 4 一 4
Du l Ch n e d n a tBr s ls a - a n lRe u d n u he sDC oo n r lS se Ba e n CAN S M t rCo to y tm sd o BU
F N H i eg ,H N og seg ,H N i m n A a- n C E D n - hn Z A G Y— i f g
( e igU i r t o eh o g , e ig10 , h a B in nv s y f c n l y B in 0 4 C i ) j e i T o j 1 2 n
l 管
l 理 C 46 AP . j
圃
逻 控制l 辑
圈
双余度 无刷 直 流电动机
i 动电 驱 路
M SE OFT
圈 凳 .r . . _
T S 2 8 2 DC M 30 lA
图 1 总体设计结构框图
基于冗余CAN总线的实时通信系统设计

Re a l - t i me Co mmu n i c a t i o n S y s t e m Ba s e d o n Re d u n d a n c y CAN- Bu s
S U Hu — pi ng, S HEN S a n — mi n, LI U W e n - y i , YE Yo n g
Ab s t r a c t : Ac c o r d i n g t o t h e h i g h e r r e q u e s t a b o u t he t r e l i a b i l i t y f o he t c o mmu n i c a t i o n s y s t e m f o r i n d u s t r i a l e n v i r o n me n t
t i me C AN- n o d e i n t h e n e t w o r k, w h i c h t h i s me t h o d e f e c t i v e l y e n h a n c e t h e s y s t e m r e l i bi a l i t y o f t h e d a t a t r a n s mi s s i o n .
b u s — r e d u n d a n c y d e s i g n or f e a c h n o d e i n t he C AN— n e t w o r k a t t h e S a B l e t i me . Wh e n t h e ma i n - n o d e w a s f a i l e d, t h e s y s t e m s w i t c h e s t o t h e b a c k u p — n o d e, a n d w h e n t h e C AN— b u s w a s f a i l e d, t h e s y s t e m s wi t c h e s t o t h e b a c k u p — b u s .T h e ma i n c o n t r o l mo d u l e - F P GA o f t h e s y s t e m t h a t h a v e d e v e l o p e d a u n i f i e d c o mmu n i c a t i o n- p r o t o c o l mo n i t o r s a l l r e l- a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于CAN总线的冗余系统方案 (1)1.冗余CAN总线系统的基本方案 (1)2.CiA 304:安全相关通信的CANopen框架 (2)2.1 简介 (2)2.2 安全相关通信机制 (3)2.3 硬件结构 (4)3.CiA 307:海事电子的CANopen框架 (5)3.1 简介 (5)3.2 硬件结构 (5)3.3 软件架构 (7)3.4 Flying NMT master (7)3.5 冗余通信机制 (8)4.CANaerospace: CAN在航电系统的应用层协议 (10)4.1 简介 (10)4.2 冗余消息ID分配 (10)4.3 系统冗余 (11)5.结论 (12)6.参考文献 (12)基于CAN 总线的冗余系统方案潘凯, 2007-03-01作为工业现场总线的一种,与其他的通信总线相比,CAN 总线具有突出的可靠性、实时性和灵活性。
目前,CAN 总线不仅在汽车领域,而且在电梯、消费电子、船舶、工程机械等自动化领域,甚至是航空航天领域得到了广泛的应用。
在某些领域,对安全性要求比较高,系统是安全相关(safety related )的。
为了满足一定的安全级别,需要使用系统冗余机制。
由于CAN 总线一开始并不是针对安全领域开发的,它对系统冗余的支持具有一定的不足。
为了在安全相关系统中使用CAN 总线,就必须建立相应的对系统冗余的支持机制。
本文研究了几种支持系统冗余的CAN 总线高层协议(CANopen CiA 304,CiA 307,CANaerospace ),介绍了这些高层协议实现CAN 冗余的主要原理,总结了在CAN 总线网络中实现系统冗余的基本方案。
1. 冗余CAN 总线系统的基本方案(1). 软件冗余 (2). 硬件冗余 (3). 总线冗余图1 几种冗余CAN 总线系统的拓扑结构在CAN 总线系统中实现冗余有三种基本方案。
方案一为软件冗余。
该方案在不改变CAN 节点任何硬件结构的条件下即可实现,如图1-(1)所示。
软件冗余使用了CAN 节点的标准结构:MCU 运行应用程序,CAN 通信由CAN 控制器(CAN Controller)和收发器(Transceiver)实现,其中CAN 控制器实现数据链路层CAN 消息的交换,而收发器实现物理层信号的交换。
在软件中,对每一条CAN消息进行复制,将同一条CAN消息向网络上发送两次,只有两条同样的消息都发送出去后才认为该消息发送成功。
为了进一步增加安全性,对第二条消息的所有数据位进行翻转,并且其ID场也至少有两位是翻转的。
除了加入软件冗余外,一些应用可能也需要加入硬件冗余,即方案二。
在该方案中,MCU和CAN控制器是冗余的,但它们仍使用相同的收发器和物理介质(电缆)。
这种方案主要用在负责进入安全状态的电路需要进行“可控”关机的场合下,如按一定顺序关闭部件或向电机施加额外的制动。
在某些场合下,如船舶应用中,电缆或整个网络发生故障的可能性要高于单个电子设备发生故障的可能性。
因此,需要对电缆进行备份,为CAN网络建立两个通道,实现总线冗余,即方案三。
在该方案中,不仅要建立两条CAN总线,而且要保证两个CAN通道的电缆以不同的路径布置。
这样,总线的主干就会分开,比如在船舶应用中一条CAN总线沿右舷布置,另一条则按左舷布置。
目前,有三种CAN总线高层协议支持不同机制的CAN冗余。
CANopen标准CiA 304规定了与安全相关通信的CANopen应用框架,采用“软件冗余+硬件冗余”的机制;CANopen标准CiA 307规定了海事电子的CANopen应用框架,采用的是双通道总线冗余机制;CANaerospace标准规定了CAN总线在航电系统中的应用协议,也采用了双通道总线冗余机制。
2. CiA 304:安全相关通信的CANopen框架2.1 简介CiA 304标准是CANopen应用层和通信子协议(CiA DS301)的附加协议,它规定了CANopen在安全相关领域使用时的应用框架。
CiA 304中只规定了CANopen设备间交换安全相关数据时所采用SRDO数据传输机制。
对实现系统冗余的一些细节问题并未作详细规定,需要使用者根据应用需求自行确定。
2.2 安全相关通信机制CAN通信安全性的概念不是保证完全没有错误和故障,而是能够检测所有错误并以可预测的(安全的)方法做出响应。
在CiA 304中,使用安全相关数据对象SRDO来保证CAN通信的安全性。
SRDO负责安全相关数据的传送,每个SRDO包含两条CAN消息,它们的ID 至少有两位是不同的。
用户需要传输的数据在两条CAN消息中是冗余的,即数据的含意相同、但是第一条消息与第二条消息相比其数据是按位翻转的。
SRDO一般按周期循环发送。
需要的时候,SRDO也可以是事件驱动的,比如当需要确保输入端发生了安全攸关变化时有快速的响应时。
CiA 304中规定禁止使用远程请求帧(RTR)请求SRDO,并且SRDO只能在NMT状态为operational时才有效。
只有当两条CAN数据帧都被正确接接收到(没有失效或超时)的时候,该SRDO才是有效的。
SRDO既可用于数据发送,也可用于接收。
针对SRDO,有两个监视参数。
一个是安全监视周期SCT,一个是安全相关对象的有效时间SRVT。
SCT用以测试CAN网络中周期性SRDO传输的正确性,如果SCT超时,安全性控制器将转入安全状态。
如图2所示。
图2 安全监视周期SCT示意图SRVT用来保证组成SRDO的两条CAN消息在限定时间内被正确接收。
通常,两条CAN消息的发送延迟时间很小,如果在SRVT期限内没有收到第二条消息,则标明网络的传输能力下降了,从而使得安全相关通信的响应时间加长,这时候安全性控制器将转入安全状态。
如图3所示。
图3 安全相关对象的有效时间SRVT示意图SRDO的发送和接收按照如图4所示的Write SRDO协议进行。
图4 Write SRDO协议2.3 硬件结构在安全系统中,硬件和软件是互相独立的。
根据安全级别,可能会用到多种结构。
在CiA 304标准中,推荐使用如图5所示的网络实现模型。
在该模型中,每个节点需要一个CAN收发器,两个独立的CAN控制器和冗余的对象字典(分别由两个MCU控制)。
图5 符合IEC 61508 SIL 2和SIL 3级别的安全相关通信网络控制模型针对IEC 61508规定的SIL 3级别的安全系统,其错误率应小于10-7/hour。
按照该要求,在网络中存在64个安全设备的条件下,每秒钟最多可发送44个SRDO。
3. CiA 307:海事电子的CANopen框架3.1 简介CiA 307提供了海事电子应用CANopen协议的一个框架,使用该框架可以方便地实现安全的互操作性并支持现代海事系统和设备所要求的功能。
尽管CAN总线并不是一种天生的冗余总线,但CiA 307标准所建立的海事应用框架具备了所有处理冗余总线所必需的规则。
在该框架下规定了海事电子应用中的冗余通信机制、节点监视原则、自启动设备和复用的MPDO机制。
在冗余通信部分,详细地说明了冗余通信系统的硬件需求、CANopen设备的基本软件结构、flying NMT master和各种冗余通信对象及其原理。
CiA 307是所有支持系统冗余的CAN高层协议中最全面的一个标准。
3.2 硬件结构CiA 307规定的CAN冗余通信系统的硬件结构如图6所示,每个海事设备都连接到两条CAN总线上。
该冗余CAN系统具有:两条CAN总线。
一条称作缺省总线(CAN1),另一条为冗余总线(CAN2)。
CAN1和CAN2在技术上没有任何区别,在工作时有一条CAN总线为“活动”总线(Active Line)。
每个CANopen设备具有两个CAN收发器。
每个CANopen设备具有两个CAN控制器。
图6 冗余通信系统的硬件结构为提高系统安全性,应确保任何一个节点与网络断开物理连接后总线都不应当被切断。
为此,规定节点的网络接口如图7所示。
图7节点CAN物理接口连接示意图3.3 软件架构支持冗余通信的海事CANopen设备的软件架构如图8所示。
每个CANopen 设备应同时运行在两个独立的CAN通道上。
两个CAN通道具有独立的NMT slave状态机,CANopen设备的节点状态由节点状态判决模块(Node state determination)根据两个通道上的NMT slave状态决定。
图8 CANopen设备的基本软件架构3.4 Flying NMT master为了在冗余系统中实现flying master原理,CiA 307规定了如图9所示的系统启动过程。
该过程只针对具有缺省和冗余两个CAN通道的CANopen设备。
上电后,首先判断哪个CAN通道是活动通道;接着,在活动CAN通道上按照CiA 302标准决定哪个设备为master设备。
当某个设备获取master资格后,它启动活动CAN总线上的CAN网络。
然后,master设备向另一条CAN总线发送“复位通信”命令以启动该总线上的网络。
图9 冗余通信系统的flying master原理3.5 冗余通信机制CiA 307规定了各种CANopen通信对象的冗余通信机制,包括过程数据对象PDO、紧急事件对象、时戳对象、同步对象、服务数据对象SDO和网络管理对象NMT。
其中比较典型的是冗余PDO的发送和接收机制。
在CANopen网络中,使用PDO交换过程数据。
图10显示了冗余PDO发送的基本原理和相关时间参数。
每个PDO从两个CAN通道(包括发送CAN控制器、发送总线驱动器、CAN总线、接收总线驱动器、接收CAN控制器)发送。
因为两个通道上的状况是不同的,相关PDO的发送会在时间上也会存在差异。
假设对一个设计良好的系统,PDO的发送会限定在一段确定的时间内。
为保证做到这一点,在CANopen标准中使用了禁止时间的概念。
禁止时间保证所有重要消息都会在一个确定的时间窗内发送。
这样,当一个PDO的发送延迟时间太长时,就能检测到某通信通道的故障。
图10 冗余PDO发送模型CiA 307规定的冗余CAN网络中PDO的发送规则如下:(1) PDO在两条CAN总线上是同时被请求发送的;(2) PDO的发送必须是在提出发送请求后的最大发送延迟时间内进行;(3) PDO的发送间隔应大于其禁止时间(inhibit time);(4) 缺省CAN通道(CAN1)具有一个“通道错误计数器”(Channel ErrorCounter),用以记录通道上发生的PDO发送错误状况。
通道错误计数器的值按照一定的规则增加或减小。
当其值超过失效计数器阈值时,CAN1不再发送心跳消息,并且由冗余通道(CAN2)发送“指示活动总线”消息,活动总线切换为CAN2。