牛头刨床机构设计说明书
牛头刨床主体机构说明书
图2牛头刨床的主体结构课程设计的内容包括:1)牛头刨床主传动系统总体传动方案的设计构思一个合理的传动系统。
它可将电机的高速转动(1440转/分)变换为安装有刨刀的滑枕5的低速往复移动(要求有三挡速度:60,95,150次/分)。
其中,将转动变为移动的装置(主体机构)采用图2所示的连杆机构。
在构思机构传动方案时,能做到思路清晰,各部分的传动比分配合理,最后在计算机上绘出主传动机构的原理示意图。
2)牛头刨床主体机构的尺度综合给定条件:刨头的最大行程H=500mm,行程速比系数k=2,各滑块的长度均为100mm,要求合理确定主体机构的其它尺度参数。
3)牛头刨床主体机构的运动分析根据已定出的主体机构的尺度参数,按曲柄处于最低转速、滑枕处于最大行程的工况对主体机构进行运动分析。
设各具有旋转运动的构件对x轴的转角分别为iiθ,(为旋转构件的标号),相应的角速度和角加速度分别为ωi,εi;用解析法求出当曲柄转角θ1从刨刀处于最右侧时起,沿逆时针方向转动每隔100计算一组运动参数,其中包括:各杆的角位置、角速度、角加速度及刨刀的位置刀s(以最右点为零点)、速度刀v和加速度刀a,应用计算机在同一幅图中绘出刨刀的位移曲线、速度曲线和加速度曲线,并分析计算结果的合理性。
4)牛头刨床主体机构的受力分析设摆杆3的质心在其中点处,质量为40kg,摆杆3对质心的转动惯量为3kg.m2;滑枕5的质量为50kg,质心在E点处;其余构件的质量和转动惯量以及运动的摩擦忽略不计。
假定刨刀在空回行程不受力,在工作行程中所受的阻力为水平力,其大小见图3,作用点在滑枕下方100mm 处。
用解析法求出机构处于不同位置时应加在曲柄上的驱动力矩TN 以及各运动副的约束总反力的大小和方向。
表1表22、刨削主体机构构型的比较选取方案2虽有急回特性,但由于机构运动时候,导杆带动的滑动机构会受力不均,短时间工作影响不大,对于生产生活机构不是很合适的。
方案3导杆一端都用的曲柄连接,根据K 值得计算是不具有急回特性的,但是由于生产的需要,急回特性会在工作是工作时间缩短。
牛头刨床机构设计说明书
2
根据电机转速和曲柄转速以及皮带轮直径,算出两级齿轮传动的总传动比,再按传动比先小后大的原则分配两级传动比的大小。选择齿数时,为避免根切,一般应满足小齿轮的齿数大于17。计算时按教材中有关变为齿轮传动的设计步骤(P108)求出xΣ=x3+x4, y, Δy。按小齿轮变位系数大,大齿轮变位系数小,或为零的原则分配变位系数x3,x4,最后给出所有四个齿轮的尺寸并校核ε>1。注意当大齿轮的变位系数选择为零时,仍然需要齿顶消减,因此与标准齿轮不同,称为零变位齿轮。
1
(1)刨刀工作行程要求速度比较平稳,空回行程时刨刀快速退回,机构行程速比系数在1.4左右。
(2)刨刀行程H=300mm或H=150mm。曲柄转速、切削力、许用传动角等见表1。
(3)切削力P大小及变化规律如图1所示,在切削行程的两端留出一点空程。
2
在满足运动要求和动力要求的条件下,每组拟出1个设计方案(可自己设计,也可从3的建议中选取),对选定的方案用图解法作一个一般位置的运动分析,包括机构运动简图,速度,加速度图。
6
图纸上应包括机构运动简图,速度和加速度运动分析图,机构运动分析的位置,速度,加速度线图,等效阻力矩、驱动力矩线图,等效阻力矩作功及等效驱动力矩作功图。
三
1
齿轮传动机构统一采用图1所示的设计方案,其参数按主体机构中刨刀的行程选取。电机输入转动,经皮带轮d1、d2及齿轮,Z1,Z2及Z3,Z4,驱动主体机构的曲柄转动。电机转速,皮带轮直径以及齿轮的模数见表2。
切削力P(N)
许用传动角
60
7000
50°
100
796.87
机械原理课程设计牛头刨床说明书

之五兆芳芳创作学校:河南大学班级:专业:机制学号:指导老师:目录一、课程设计任务书21.任务原理及工艺动作进程22.原始数据及设计要求3二、设计说明书41.画机构的运动简图42.对位置4点进行速度阐发和加快度阐发63.对位置9点进行速度阐发和加快度阐发9速度阐发图:104.对位置9点进步履态静力阐发12心得体会15谢辞16参考文献17一、课程设计任务书1.任务原理及工艺动作进程牛头刨床是一种用于平面切削加工的机床.刨床任务时,如图(1-1)所示,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动.刨头右行时,刨刀进行切削,称任务行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率.为此刨床采取有急回作用的导杆机构.刨头在任务行程中,受到很大的切削阻力,而空回行程中则没有切削阻力.切削阻力如图(b)所示.(b)2.原始数据及设计要求Y图(1-1)已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上.要求作机构的运动简图,并作机构两个位置的速度、加快度多边形以及刨头的运动线图.以上内容与前面动态静力阐发一起画在1号图纸上.二、设计说明书1.画机构的运动简图1、以O4为原点定出坐标系,按照尺寸辨别定出O2点,B点,C点.确定机构运动时的左右极限位置.曲柄位置图的作法为:取1和8’为任务行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2标的目的将曲柄圆作12等分的位置(如下图).图1-2取第I计划的第4位置和第9位置(如下图1-3).图 1-32. 对位置4点进行速度阐发和加快度阐发(a ) 速度阐发 取速度比例尺l μ=mmsm001.0对A 点:4A V = 3A V + 34A A V 标的目的:4BO ⊥A O 2⊥ //B O 4 大小: ? √ ?4A V =l μ⨯4pa =sm mm mm s m673239.0239.673001.0=⨯ 4ω=AO A l V 44=sr mm sm38431.1486334.0673239.0=34A A V =l μ43a a l =s m mm mm s m156326.0326.156001.0=⨯ V 5B = V 4B =4ω⨯B O l 4=sm 747530.0对于C 点:C V = B V + CB V 标的目的: //'XX B O 4⊥BC ⊥ 大小: ? √ ?C V =l μ⨯pc l =mms m001.0s m mm 749708.0708.749=⨯ CB V =l μ⨯bc l =mmsm001.0sm mm 0490895.00895.49=⨯ 5ω=bcl CBl u V =s r 363626.0 速度阐发图:图 1-4(b)加快度阐发 选取加快度比例尺为a μ=mmsm 2001.0对于A 点:4A a = n A a 4 + t A a 4 = 3A a + k A A a 34 + 34r A A a 标的目的:A→4O B O 4⊥ A→2O B O 4⊥//B O 4大小: √ ? √√ ?由于3A a =22ωA O l 2=234263.4smK A Aa 34=24ω34A A V =2432808.0s mn A a 4=24ωA O l 4=2931975.0s m 已知,按照加快度图1-5可得:t A a 4=a μ''a n l =2549416.0sm , r A A a 34=a μ''a k l =2298112.3s m .4A a =24ωB O l 4=2081866.1sm ,5ω=CB V /BC l s r .另外还可得出:B a =4A a ⨯AO B O l l 44=2201248.1s mn CBa =25ωBC l =201785.0s m对于C 点C a =B a +n CBa + tCB a 标的目的://'XX B→4O C→B BC ⊥大小: ?√√ ?由nCBa =25ω⨯BC l = 201785.0sm ,B a =4A a ⨯AO B O l l 44=2201248.1s m 已知,按照按照加快度图可得:C a =a μ''c p l =2617683.0sm ,t CB a =a μ'''c n l =29942344.0s m加快度阐发图:图 1-53.对位置9点进行速度阐发和加快度阐发(a ) 速度阐发 取速度比例尺l μ=mmsm001.0对A 点:4A V = 3A V + 34A A V 标的目的:4BO ⊥A O 2⊥ //B O 4 大小: ? √ ?4A V =l μ⨯4pa =sm mm mm s m3289949.09949.328001.0=⨯ 4ω=AO A l V 44=sr mmsm 044034.1315119.03289949.0= 34A A V =l μ43a a l =s m mm mm s m60782497.082497.607001.0=⨯ V 5B = V 4B =4ω⨯B O l 4=sm 56377824.0对于C 点:C V = B V + CB V 标的目的: //'XX B O 4⊥BC ⊥大小: ? √ ?C V =l μ⨯pc l =mms m001.0sm mm 5518355.08355.551=⨯ CB V =l μ⨯bc l =mmsm001.0s m mm 1436768.06768.143=⨯ 5ω=bcl CBl u V =s r 06427.1 速度阐发图:图 1-6(b)加快度阐发 选取加快度比例尺为a μ=mmsm 2001.0对于A 点:4A a = n A a 4+ t A a 4 = 3A a + k A A a 34 + 34r A A a 标的目的: A→4O B O 4⊥ A→2O B O 4⊥ //B O 4大小: √ ? √√ ?由于3A a =22ωA O l 2=234263.4smKA A a 34=24ω34A A V =226918.1s mn A a 4=24ωA O l 4=24818.343.0s m 已知,按照加快度图1-7可得:t A a 4=a μ''a n l =25498973.2sm , r A A a 34=a μ''a k l =24106178.2s m4A a =24ωB O l 4=257293.2s m另外还可得出:B a =4A a ⨯AO B O l l 44=24090669.4s mn CBa =25ωBC l =2152911.0s m对于C 点C a = B a + n CBa + tCB a 标的目的://'XX B→4O C→B BC ⊥大小: ? √√ ?由nCBa =25ω⨯BC l = 2152911.0sm ,B a =4A a ⨯AO B O l l 44=24090669.4s m 已知,按照按照加快度图可得:C a =a μ''c p l =2247506.4sm ,t CB a =a μ'''c n l =25366925.0s m加快度阐发图:图 1-74. 对位置9点进步履态静力阐发取“9”点为研究对象,别离5、6构件进交运动静力阐发,作阻力体如图1─8所示.图 1-8已知G6=700N ,又ac=ac5=4.2475055m/s2,那么我们可以计较设45R F 与水平导轨的夹角为α,可测得α的大小为2.6456785由0cos 456=-=∑αR I XF F F,∑=-+=0sin 6456G F F FR R Yα可计较出717328.30345=R F , 98071.6856=R F 别离3,4构件进交运动静力阐发,杆组力体图如图1-9所示图 1-9已知: FR54=FR45=303.717328N ,G4=200Nm N J M S I /901.8091855.81.1444=⨯-=⨯-=α按照∑=⨯-+⨯+⨯+⨯=0423435424144h F M h F h F h G MR I R I O ,其中1h ,2h ,3h ,4h 辨别为4G ,4I F ,54R F ,23R F 作用于4O 的距离(其大小可以测得),可以求得:23R F =609.753093N.作力的多边形如图1-10所示图 1-10由图1-10可得:4I R F = 250.04 N对曲柄2进交运动静力阐发,作组力体图如图1-11所示,图 1-1132R F 作用于2O所以曲柄上的平衡力矩为:m N h F M R /0924.1332=⨯=,标的目的为逆时针.心得体会美丽的花朵必须要通过辛勤的汗水浇灌.有开花才有结果,有支出才有收获.通过几天日日夜夜的斗争,在老师亲切地指导下,在同学们的密切配合下,当然也有自己的努力和辛酸,这份课程设计终于完成了,心里无比的欢快,因为这是我们努力的结晶.在这几天中,我有良多的体验,同时也有我也找到许多的毛病,仅就计较机帮助画图而言,操纵的就远远不敷熟练,专业知识也不克不及熟练应用.但是通过这次实践设计,我觉得我有了很打的提高.其次,通过这次设计我学会了查找一些相关的东西书,并初步掌握了一些设计数据的计较办法;再次,自己的计较机画图水平也有了一定的提高,并对所学知识有了进一步的理解.当然,作为自己的第一次设计,其中肯定有太多的缺乏,希望在今后的设计中,能够得到更正,使自己日益臻于成熟,专业知识日益深厚.我在这次设计中感应了协作的力量,增强了自己的团队精神.这将使我受益终生.“功到自然成.”只有通过不锻炼,自己才干迎接更大的挑战和机会,我相信我自己一定能够在锻炼成长.谢辞本论文是在李老师亲自指导下完成的.导师在学业上给了我很大的帮忙,使我在实验进程中避免了许多无为的任务.导师一丝不苟、严谨认真的治学态度,精益求精、诲人不倦的学者风采,以及正直无私、磊落大度的崇高品格,更让我明白许多做人的道理,在此我对老师暗示衷心的感激!参考文献4.《机械原理教程.》申永胜主编. 北京:清华大学出版社, 19995.《机械原理》邹慧君等主编,初等教育出版社,19996.《连杆机构》伏尔默J主编,机械产业出版社7.《机构阐发与设计》华大年等主编,纺织产业出版社8.《机械运动计划设计手册》邹慧君主编,上海交通大学出版社9.《机械设计>>吴克坚,于晓红,钱瑞明主编. . 北京:初等教育出版社,200310.《机械设计>>.龙振宇主编. 北京:械产业出版社,200211. 《机械设计根本(第四版)》杨可桢,程光蕴主编. . 北京:初等教育出版社,199912.《机械设计根本(下册)》张莹主编.. 北京:机械产业出版社, 199713.《机械设计(机械设计根本Ⅱ)》周立新主编. . 重庆:重庆大学出版社, 199614.《机械系统设计》朱龙根,黄雨华主编. 北京:机械产业出版社, 199015.《机械设计学》黄靖远,龚剑霞,贾延林主编. 北京:机械产业出版社, 199916.《机械设计手册》徐灏,第二版. 北京:机械产业出版社, 200017.《设计办法学》黄纯颍主编,机械产业出版社18.《机械传动设计手册》江耕华等主编,煤炭产业出版社19. 《机械原理》(第六版)孙桓等主编初等教育出版社20.《机械原理课程设计指导书》罗洪田编著初等教育出版社21.《机械原理教学大纲》制定人张荣江22. 机械原理郑文经吴克坚等主编。
牛头刨床设计说明书
1、课程标题与目的1.1.课程标题 ----------------牛头刨床机构的课程设计1.2.课程设计目的1、学会机械运动简图设计的步骤和方法。
2、巩固所学的理论知识,掌握机构分析与综合的基本方法。
3、培养学生使用技术资料,计算作图及分析与综合的能力。
4、培养学生进行机械创新设计的能力。
2、设计内容及要求2.1、设计内容平面刨削机床运动简图设计及分析,计算刨削机构在指定位置的速度、加速度、受力,绘制位移、速度、加速度曲线、平衡力矩曲线、等效阻力矩曲线以及等效驱动力矩曲线。
根据上述得到的数据,确定飞轮的转动惯量JF。
2.2、机器的工艺功能要求1、刨削尽可能为匀速,并要求刨刀有急回特性。
2、刨削时工件静止不动,刨刀空回程后期工件作横向进给,且每次横向进给量要求相同,横向进给量很小并且随工件的不同可调。
3、工件加工面被抛去一层后,刨刀能沿垂直工件加工面方向下移一个切削深度,然后工件能方便地作反方向间歇横向进给,且每次进给量仍然要求相同。
4、原动机采用电动机。
3、机器运动方案简图的拟定3.1、机器工艺动作分解及要求根据机器的工艺功能要求,其工艺动作分解如下:1、刨刀的切削运动:往复移动,近似均匀,具有急回特性。
2、工件的横向进给运功:间歇运动,每次移动量相同,在刨刀空回程后期完成移动,要求移动量小且调整容易。
工件刨去一层之后能方便地作反向间歇横向移动进给,同样要求反向进给量每次相同且易调整。
3、刨刀的垂直进给运动:间歇移动,工件刨去一层之后刨刀下移一次,移动量调整方便。
3.2、机器运动循环图图3-1 直线式工作循环图图3-2 圆周式工作循环图3.3三个执行机构的选型:3.3.1刨刀的切削运动按照原始条件,原动机采用电动机,电机转子的回转运动经过减速传动装置后再传给刨刀切削运动的执行机构,所以它应具备回转运动转换成双向移动的功能,常用于实现这一功能的执行机构有以下几种:1、移动从动件凸轮机构:一般凸轮作为主动件,做连续回转运动或平移运动,其轮廓曲线的形状取决于从动件的运动规律。
牛头刨床课程设计说明书
中南大学CENTRAL SOUTH UNIVERSITY课程设计题目:牛头刨床的设计学生姓名: + + + 学院:机电工程学院专业班级:机械++++ 班完成时间: 7月10日指导老师: + + +目录一、设计步骤............................................................................................................. - 2 -二、课程设计的性质、目的和任务 .................................................................. - 2 -三、机械原理课程设计的内容和方法.............................................................. - 2 -四、设计任务分配 ................................................................................................... - 3 -五、设计原始数据 ................................................................................................... - 3 -六、设计内容............................................................................................................. - 4 -七、机构工艺动作分解及运动循环图.............................................................. - 5 -八、杆件机构的分析............................................................................................... - 6 -1.速度分析:........................................................................................ - 6 -2.加速度分析:.................................................................................... - 8 -3.导杆结构的力分析............................................................................ - 9 -九、小组成员数据及其绘制的曲线 ................................................................ - 11 -十、飞轮转动惯量的计算 ................................................................................... - 12 - 十一、电动机的选择与确定 ................................................................................... - 14 - 十二、凸轮机构的设计............................................................................................. - 17 - 十三、参考文献........................................................................................................... - 21 - 十四、心得体会........................................................................................................... - 21 -一、设计步骤(1)确定扭头刨床工作原理。
机械原理课程设计说明书牛头刨床
机械原理课程设计说明书牛头刨床一、设计题目牛头刨床的机械原理设计二、设计目的本次课程设计的目的是通过对牛头刨床的设计,深入理解机械原理中机构的运动和动力传递,掌握机械设计的基本方法和步骤,提高分析和解决实际工程问题的能力。
三、原始数据及设计要求1、刨削行程长度:____mm2、刨削速度:____m/min3、行程速比系数:____4、刨刀工作行程时的平均切削力:____N5、刨刀空行程时的平均阻力:____N设计要求:1、绘制机构运动简图。
2、对机构进行运动分析和动力分析。
3、确定电动机的功率和转速。
4、设计主要零部件的结构尺寸。
四、机构的选择和工作原理牛头刨床通常采用曲柄摇杆机构来实现刨刀的往复直线运动。
其工作原理是:电动机通过皮带传动将动力传递给飞轮,飞轮带动曲柄旋转,曲柄通过连杆带动摇杆摆动,摇杆与滑枕相连,从而使滑枕带动刨刀作往复直线运动。
五、运动分析1、位移分析设曲柄长度为 r,连杆长度为 l,摇杆长度为 a,偏距为 e。
以曲柄转角φ 为自变量,根据几何关系可以得到摇杆的摆角θ 和滑枕的位移 s 的表达式。
2、速度分析对位移方程求导,可以得到摇杆的角速度ω 和滑枕的速度 v 的表达式。
3、加速度分析对速度方程求导,可以得到摇杆的角加速度ε 和滑枕的加速度 a 的表达式。
六、动力分析1、工作阻力分析根据刨削工艺要求,确定刨刀在工作行程和空行程中的阻力变化规律。
2、惯性力分析计算各构件的质量和转动惯量,根据加速度分析结果计算惯性力。
3、平衡分析考虑惯性力和工作阻力,对机构进行平衡分析,以减小振动和冲击。
七、电动机的选择1、计算工作功率根据刨削力和刨削速度,计算刨削工作所需的功率。
2、考虑传动效率考虑皮带传动、齿轮传动等的效率,计算电动机所需的输出功率。
3、选择电动机根据所需功率和转速,选择合适的电动机型号。
八、主要零部件的设计1、曲柄和连杆的设计根据受力情况和运动要求,确定曲柄和连杆的材料、尺寸和结构形式。
牛头刨床机械原理课程设计说明书
广西工学院机械原理课程设计说明书设计题目牛头刨床系别专业班级学生姓名学号指导教师日期牛头刨床课程设计0.机构简介与设计数据0.1 机构简介牛头刨床是一种用平面切削加工的机床,如下图0-1所示。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由曲柄机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机的容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工作件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的工作阻力(在切削的前后个有一段约0.05H的空刀距离,见图0-1b)而空回行程中则没有切削阻力。
因此刨头在整个运动循环中受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量.图0-1 牛头刨床机构简图及阻力曲线图0.2设计数据表4—1 设计数据1.导杆机构的运动分析已知:曲柄每分钟转数2n ,各机构尺寸及中心位置,切刨头导路x-x 位于导杆端点B 所作圆弧高的平分线上。
要求:作该机构的运动简图,并作第方案Ⅲ机构 2和4+5°位置的速度和加速度多边形以及刨头的运动线图。
用CAD 软件计算并绘出准确的速度和加速度的方向和大小,并且用解析法进行验算,此两种方法保留八位小数,以上内容与后面的动态静力分析图一起画在1号A3图纸上。
曲柄位置图的作法为:取1和8'为工作行程起点和终点所对应的曲柄位置,1'和7' 为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起始顺时针方向将曲柄圆周作12等分的位置。
如图O4O24位置+5°位置图1-1用ω2表示杆2的角速度,ω3表示滑块3角速度,ω4表示4杆的角速度ω5表示5的角速度,又滑块3、杆4以移动副连接,所以ω3=ω4对位置2 和位置 4+5°速度分析:又已知ω2=(2.4π×n2)/60=7.53982236 rad/s先对2杆和滑块3和4杆分析速度, A点在3滑块上的速度为V A3,在4杆的速度为V A4,又由速度投影定理可得V B ,最终可求出V C附图:位置2 和位置4+5°的速度矢量方程图如图1-2所示P位置2速度分析位置4+5°速度分析图1-2表格如下对位置2和4+5°位置加速度分析:先对2杆和滑块3和4杆分析加速度, A点在3滑块上的速度为a A3,又由速度图解法知道科氏加速度的大小和方向和相对加速度的方向,还知道a A3法线加速度的大小和方向,则可求出a A3,又由速度投影定理可得a B,又由速度图解法可知道a n CB的大小和方向还有a t CB的方向则可做图求出a C。
机械原理牛头刨床课程设计说明书
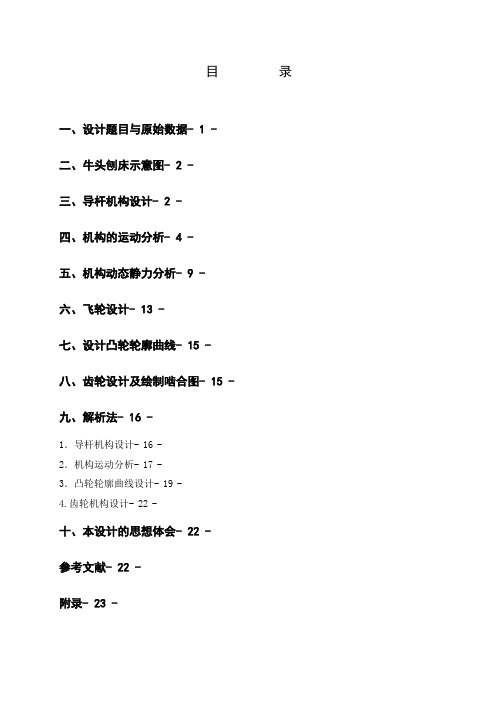
目录一、设计题目与原始数据- 1 -二、牛头刨床示意图- 2 -三、导杆机构设计- 2 -四、机构的运动分析- 4 -五、机构动态静力分析- 9 -六、飞轮设计- 13 -七、设计凸轮轮廓曲线- 15 -八、齿轮设计及绘制啮合图- 15 -九、解析法- 16 -1.导杆机构设计-16-2.机构运动分析-17-3.凸轮轮廓曲线设计-19-4.齿轮机构设计-22-十、本设计的思想体会- 22 -参考文献- 22 -附录- 23 -一、设计题目与原始数据1.题目:牛头刨床的综合设计与分析2.原始数据:刨头的行程H=550mm行程速比系数K=1.6机架长L O2O3=400mm 质心与导杆的比值L O3S4/L O3B=0.5 连杆与导杆的比值L BF/L O3B=0.3 刨头重心至F点距离X S6=160mm 导杆的质量m4=15刨头的质量m6=58导杆的转动惯量J S4=0.7切割阻力F C=1300N切割阻力至O2的距离Y P=175mm构件2的转速n2=80许用速度不均匀系数[δ]=1/40齿轮Z1、Z2的模数m12=15小齿轮齿数Z1=18大齿轮齿数Z2=46凸轮机构的最大摆角φmax=16º凸轮的摆杆长L O4C=140mm凸轮的推程运动角δ0=60º凸轮的远休止角δ01=10º凸轮的回程运动角δ0'=60º凸轮机构的机架长L o2o4=150mm 凸轮的基圆半径r o=55mm凸轮的滚子半径r r=15mm二、牛头刨床示意图如图1所示图1三、导杆机构设计1、已知:行程速比系数K=1.6刨头的行程H=550mm机架长度L O2O3=400mm连杆与导杆的比L BF/L O3B=0.32、各杆尺寸设计如下A、求导杆的摆角:ψmax =180°×(K-1)/(K+1)=180°×(1.6-1)/(1.6+1)=42°B、求导杆长:L O3B1=H/[2sin(ψmax/2)]=550/[2sin(42°/2)]=776mmC、求曲柄长:L O2A =L O2O3×sin(ψmax/2)=400×sin21°=142mmD、求连杆长:L BF=L O3B×L BF/L O3B=776×0.3=233mmE、求导路中心到O3的距离:L O3M=L O3B-L DE/2=L O3B{1-[1-cos(ψmax/2)]/2}=750mmF、取比例尺:μL=0.005m/mm在1#图纸中央画机构位置图,机构位置图见1#图纸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
建议用边设计边整理,最后汇集成册的方法。内容包括:
1、设计题目
2、主体机构设计方案的拟定,各方案的机构运动简图,以及方案的分析和论证。
3、所有设计分析计算的基本过程,参数选择,和计算结果,项目较多时应列表。
4、各种线图及机构简图。
四、
设计方案
曲柄摇杆机构与摇杆滑块机构组合
曲柄转速
n(r/min)
行程(300mm)
5
在对主体机构作运动分析的基础上,在满足运转不均匀系数δ=0.15的条件下,用简化计算方法确定飞轮的转动惯量。选取主体机构的曲柄为等效构件,作用在曲柄上的驱动力矩Md为常量,生产阻力为切削力P,飞轮安装在曲柄轴上,要求计算等效构件10-12个等分位置及切削起始点和终点的等效阻力矩,并在图纸上绘制等效阻力矩Mr(φ)和等效驱动力矩Md(φ)线图(φ为曲柄的角位置),再绘制等效力矩作功线图,从而求得最大盈亏功,用简化计算方法确定飞轮转动惯量JF。
3
A、摆动导杆机构与摇杆滑块机构组合
B、转动导杆机构与对心曲柄滑块机构组合
C、偏置曲柄滑块机构
D、曲柄摇杆机构与摇杆滑块机构组合
E、双曲柄机构与对心曲柄滑块机构组合
F、摆动导杆机构与齿轮齿条机构组合
G、摆动从动件凸轮机构与摇杆滑块机构组合
4
刨刀的位移s,速度v,加速度a的数学模型,并绘出刨刀的位移线图,速度线图和加速度线图(可借助计算机编程实现)。
齿轮1、2采用标准齿轮,齿轮3、4由于受力较大,拟采用正传动。啮合角建议带轮直径,算出两级齿轮传动的总传动比,再按传动比先小后大的原则分配两级传动比的大小。选择齿数时,为避免根切,一般应满足小齿轮的齿数大于17。计算时按教材中有关变为齿轮传动的设计步骤(P108)求出xΣ=x3+x4, y, Δy。按小齿轮变位系数大,大齿轮变位系数小,或为零的原则分配变位系数x3,x4,最后给出所有四个齿轮的尺寸并校核ε>1。注意当大齿轮的变位系数选择为零时,仍然需要齿顶消减,因此与标准齿轮不同,称为零变位齿轮。
6
图纸上应包括机构运动简图,速度和加速度运动分析图,机构运动分析的位置,速度,加速度线图,等效阻力矩、驱动力矩线图,等效阻力矩作功及等效驱动力矩作功图。
三
1
齿轮传动机构统一采用图1所示的设计方案,其参数按主体机构中刨刀的行程选取。电机输入转动,经皮带轮d1、d2及齿轮,Z1,Z2及Z3,Z4,驱动主体机构的曲柄转动。电机转速,皮带轮直径以及齿轮的模数见表2。
1
(1)刨刀工作行程要求速度比较平稳,空回行程时刨刀快速退回,机构行程速比系数在1.4左右。
(2)刨刀行程H=300mm或H=150mm。曲柄转速、切削力、许用传动角等见表1。
(3)切削力P大小及变化规律如图1所示,在切削行程的两端留出一点空程。
2
在满足运动要求和动力要求的条件下,每组拟出1个设计方案(可自己设计,也可从3的建议中选取),对选定的方案用图解法作一个一般位置的运动分析,包括机构运动简图,速度,加速度图。
机械原理课程设计
(普通高等教育)
论文题目
牛头刨床机构设计说明书
学 院
工学院
专业名称
机械设计及其自动化
班 级
机械11-4班
学 号
111014416
姓 名
李鹏
小组成员
指导教师
康峰
机械原理课程设计实验指导书
一、机械原理课程设计的目的与任务
1
机械原理课程设计是继机械原理课程之后独立的设计课程。其目的是进一步加深学生对所学知识的理解。使学生对于机构分析与综合的基本理论、基本方法有一个系统的完整的概念,培养学生综合运用所学知识独立解决机构设计问题的能力和使用计算机解决工程技术问题的能力。同时培养学生的创新精神。
课程设计包括,主体机构设计,齿轮机构设计两个部分。主体机构由学生自定设计方案,齿轮机构采用统一设计方案。
4
在课程设计前要阅读指导书,复习有关课程内容,拟定主体机构的设计方案前要查阅有关资料,观看录像片,了解各种机构及其使用场合。
图1切削力图2牛头刨床机构
二、主体机构设计
主体机构是指实现刨刀往复运动(主运动)的传动机构,设计方案由学生在作方案比较和论证的基础上自选。
2、课程设计题目:牛头刨床机构设计或其他自选题目
3、课程设计的任务
课程设计的任务是根据要求拟定和论证机器的主体机构的设计方案,并对选定方案进行运动分析,确定飞轮转动惯量,对齿轮机构进行设计计算,最后完成设计图纸,设计说明书(A4纸)(如果在计算过程中借助计算机计算,则需要打印源程序和计算结果、图表结果)。
切削力P(N)
许用传动角
60
7000
50°
100
796.87
机构
运动曲线图
1
2
3
设计心得和总结