Adams单摆建模与仿真分析
ADAMS实例建模仿真
ADAMS实例建模仿真Adams 实例建模仿真⽬录Adams课程论⽂ (1)第⼀章模型的建⽴ (2)1、模型的介绍 (2)2、启动ADAMS (2)3、栅格设置 (3)4、创建齿轮 (3)5、创建连杆 (5)6、创建滑块 (6)第⼆章创建转动副,移动副,齿轮副,驱动⼒,仿真 (7)1、创建转动副 (7)2、创建移动副 (8)3、创建齿轮副 (9)4、创建驱动⼒ (10)5、仿真 (11)第三章计算结果后处理 (12)1、滑块的速度曲线 (12)2、滑块位移曲线 (12)3、滑块加速度曲线 (13)4、齿轮1与齿轮2转⾓曲线 (13)5、连杆曲线图 (14)6、录制动画并导出 (15)第四章总结 (17)第⼀章模型的建⽴1、模型的介绍如图⼀所⽰,该模型由齿数z为200,模数m为4,半径400mm的齿轮1,齿数z为100,模数m为4,半径200mm的齿轮2,以及连杆和滑块组成。
该模型的运动形式为齿轮1为驱动轮,带动齿轮2转动,齿轮2于连杆偏⼼连接,带动连杆推动滑块直线反复运动。
实质上是将齿轮的转动转化为滑块的平动。
图1-1 模型简图2、启动ADAMS2.1 在桌⾯点击ADAMS快捷键Adams - View x64 2013,或者Windows开始菜单启动:“开始”—“所有程序”—“MSC.Software”—“Adams x64 2013”—“A View”—“Adams-View”。
2.2 启动后出现Welcome欢迎窗⼝,如图1-1所⽰,点击New Model,出现Create New Model,Model Name为adams,Gravity为Earth Normal,Units为MMKS。
2.3 单击OK,进⼊ADAMS。
图1-2 启动ADAMS3、栅格设置3.1 点击Setting,选择Working Grid。
3.2 弹出的窗⼝设置⽹格范围尺⼨,如图1-2所⽰。
图1-3 修改栅格4、创建齿轮4.1 如图1-3所⽰,单击Bodies菜单栏中的圆柱体(Cylinder),在出现的对话框中设置圆柱的长度(Length)50mm和半径(Radius)400mm。
基于adams的摆环机构运动仿真及优化设计
基于adams的摆环机构运动仿真及优化设计:
摆环机构是一种基本的机械运动装置,它具有结构简单、节省空间、运动可靠性高等
特性,被广泛应用于机床、注塑机等多个机械工程。
Adams是用于机械系统动力学仿真的一种软件,它可以用来仿真摆环机构的运动时响应特性,为优化设计提供了有效支持。
Adams能够仿真摆环机构流程和多个运动参数之间的相互作用,可以准确表示摆环机
构运动变化,是实现摆环机构优化设计的重要工具。
举例来说,Adams能够根据摆环机构
内部参数计算两个自由度的力学链条参数,并计算其运动特性,为给定的摆环机构结构指
定精确的位置。
此外,由于Adams可以模拟摆环机构内部多个参数之间的相互影响,因此
能够准确预测摆环机构的运动变化。
Adams的优势还可以体现在优化设计中。
借助于Adams,我们可以从一系列不同的输
入参数,其中包括质量、运动参数、力学链条等参数,寻求摆环机构最优解。
Adams还可
以模拟出足够精确的摆环机构运动轨迹,利用这些模拟数据来确定新的摆环机构结构及运
动参数的一系列范畴,通过这种设计也可以实现优化设计的效果。
另外, Adams还可以实现精确模拟,以及流体动力学分析等多种功能,同时也可以进行参数优化和对比分析,根据收集的实际数据,快速验证摆环机构的结构参数和运动参数,从而可以更有效地实现优化设计,提高生产效率。
总之,Adams可以用于摆环机构的仿真和优化设计,其准确的运动仿真和多功能优化
支持使得摆环机构可以更加精确的满足设计要求,从而提升设计效率。
ADAMS建模与仿真分析
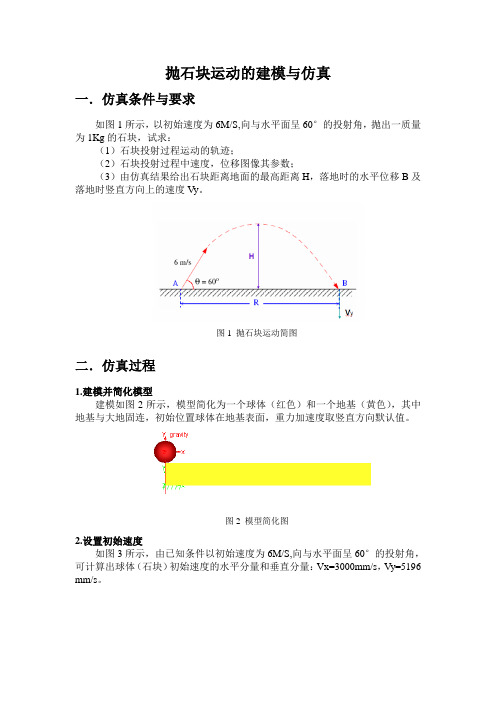
抛石块运动的建模与仿真一.仿真条件与要求如图1所示,以初始速度为6M/S,向与水平面呈60°的投射角,抛出一质量为1Kg的石块,试求:(1)石块投射过程运动的轨迹;(2)石块投射过程中速度,位移图像其参数;(3)由仿真结果给出石块距离地面的最高距离H,落地时的水平位移B及落地时竖直方向上的速度Vy。
图1 抛石块运动简图二.仿真过程1.建模并简化模型建模如图2所示,模型简化为一个球体(红色)和一个地基(黄色),其中地基与大地固连,初始位置球体在地基表面,重力加速度取竖直方向默认值。
图2 模型简化图2.设置初始速度如图3所示,由已知条件以初始速度为6M/S,向与水平面呈60°的投射角,可计算出球体(石块)初始速度的水平分量和垂直分量:Vx=3000mm/s,Vy=5196 mm/s。
图3 初始速度设置3.定义石块质量如图4所示。
图4 定义质量4.建立测量图5 建立测量5.进行仿真设置End Time:1.5;Step Size:0.01,得到运动轨迹如图6所示,由轨迹可知石块运动轨迹为一条抛物线,有石块轮廓密度可见石块运动速度由大变小再变大。
图6 运动轨迹5.数据数据与图表处理表1为石块运动过程中的在X及Y方向上的位移速度部分测量参数表,有表一可看出石块初始速度为Vx=3000mm/;Vy=5196mm/s;在t=0.54s时石块运动大约至竖直位移最高处,此时竖直位移约为1376mm,其在竖直方向上的速度分量约为100mm/s,接近零速度,若提高仿真精度可看到当石块运动至最高点时对应的竖直方向的速度分量几乎为零;图7为速度位移测量曲线,与表一一一对应;图8为按t=0.54s确定石块距离地面的最高距离H对应标记点及此时的数字标签;图9为按仿真动画单步逼近播放获得的石块返回地面瞬间的状态及其时对应的时间;图10 石块返回地面时对应标记点及此时的数字标签;图11 石块返回地面时竖直方向速度时对应标记点及其数字标签。
ADAMS单摆实例

实例:单摆如图,AB为一个质量m=2kg、长度L=450mm的杆,杆AB在过A点的竖直平面内摆动。
当角度θ=30°时,角速度а=3rad/s,试计算在这一时刻A点销所受的力?启动ADAMS/View启动ADAMS/View选择创建一个新模型,如图,单击OK创建摆杆1.在主工具箱中,单击连杆工具图标2.在其选项中输入相关数据如图3.在工作视窗中,选择点(0,0,0)作为摆杆的起始点。
修改摆杆质量该问题需要设定摆杆的质量为2kg。
1.在摆杆上点击鼠标右键,选择如图:然后选择User Input,在mass文本框中输入2.0单击OK按钮,完成设置。
设置摆杆位置在主工具箱中单击位置设置图标在Angle文本框中输入30,在建模视图中选择摆杆,然后选择顺时针旋转图标,如图:创建转动副在主工具箱中,单击转动副工具图标,在其选项做如下修改,在工作视窗中用鼠标选择摆杆的起始点处的标记点PART2_MARKER_1,在摆杆与大地之间创建一个转动副设置初始运动现在在转动副上添加运动,使摆杆以3.0rad/s的初速度旋转。
在摆杆上右击鼠标,如图在Category选项中选择Velocity Initial Conditions,然后选择Part CM(零件质心)及其下面的Z axis,在Z axis中输入3.0r,代表转速为3.0rad/s,单击OK完成设置。
测量转动副受力右击摆杆右上角的转动副,选择Joint:JOINT_1,并在弹出菜单中选择Measure 命令,显示运动度测量对话框。
完成以下设置后,单击OK完成设置,会弹出一个空白的图表。
模型仿真单击主工具箱中的仿真工具图标,在End Time文本框中输入0.5,在Steps 文本框中输入50,然后单击开始图标,摆杆将绕着转动轴摆动,并在转动副受力曲线图中现实相应的数据,仿真结束后,单击返回图标,模型复位。
进行求解在转动副受力曲线图的空白处右击鼠标,显示弹出菜单,如图选择:进入ADAMS/PostProcessor界面,单击图标,显示曲线统计工具条,然后将光标移到曲线的起始位置,在曲线统计工具条中,显示x坐标值为0和相应的坐标值10.7762,即为A点转轴的受力。
ADAMS 2023动力学分析与仿真从入门到精通

ADAMS 2023动力学分析与仿真从入门到精通简介ADAMS(Advanced Dynamic Analysis of Mechanical Systems)是一种用于进行动力学分析和仿真的强大工具。
它可以帮助工程师和设计师在产品开发过程中预测和优化机械系统的性能。
无论是汽车、飞机还是机械设备,ADAMS都可以用来模拟其在不同工况下的动态行为。
本文档将介绍ADAMS 2023的基本概念和操作指南,从入门到精通,帮助读者快速上手并掌握ADAMS的使用方法。
1. ADAMS简介1.1 ADAMS的定义ADAMS是一种基于多体动力学理论的仿真软件,它能够对复杂的机械系统进行动力学分析和仿真,并提供详细的结果和可视化的模拟效果。
它主要用于评估系统的运动性能、力学特性和振动响应,是工程师进行设计优化和故障排查的重要工具。
1.2 ADAMS的应用领域ADAMS广泛应用于汽车、航空航天、机械设备等领域,用于模拟和分析复杂机械系统的动态行为。
例如,汽车制造商可以使用ADAMS来评估车辆的悬挂系统、转向动力学和车身振动特性;航空航天公司可以使用ADAMS来模拟飞机的飞行动力学和振动响应。
2. ADAMS基本概念2.1 多体系统ADAMS将机械系统建模为多个刚体之间的约束系统。
每个刚体包含了几何特征、质量和惯性属性。
通过在刚体之间添加约束和运动条件,可以建立复杂的多体系统模型。
2.2 约束约束用于描述刚体之间的相对运动关系。
ADAMS提供了各种类型的约束,如平面、关节、铰链等。
通过正确定义约束条件,可以模拟系统的运动和力学特性。
2.3 运动条件运动条件用于描述系统的运动。
ADAMS提供了多种运动模式,如位移、速度、加速度和力矩等。
通过在刚体上施加运动条件,可以模拟系统的各种运动情况。
3. ADAMS操作指南3.1 ADAMS界面ADAMS的用户界面由多个工具栏、菜单和窗口组成。
主要包括模型浏览器、属性编辑器、运动学模块、仿真控制和结果查看器等。
利用ADAMS进行动态仿真分析的一般方法和过程111

基于ADAMS软件进行动态仿真分析的一般方法和过程摘要:本文通过对相关资料的总结归纳,介绍了虚拟样机的发展现况、ADAMS软件、特点以及利用其进行动态仿真的一般方法和过程。
并结合多功能开沟机液压系统进行了建模与仿真分析。
关键词:仿真 ADAMS 优化虚拟样机1、前言随着近代科学技术的发展,工程设计的理论、方法和手段都发生了很大的变化。
从计算机辅助工程(CAE)的广泛应用,到并行工程(CE)思想的提出与推行,从根本上改变了传统的设计方法,极大地促进了制造业的发展和革命。
但与此同时,人们已清楚地认识到:即使系统中的每个零部件都是经过优化的,也不能保证整个系统的性能是良好的,即系统级的优化绝不是系统中各部件优化的简单叠加。
于是,由CAX/DFX等技术发展而来,以系统建模、仿真技术为核心的虚拟样机技术(Virtual Prototyping)得到了迅速发展,并正成为各国纷纷研究的新的热点。
虚拟样机技术(Virtual Prototyping Technology)是当前设计制造领域的一项新技术,其应用涉及到汽车制造、工程机械、航空航天、造船、航海、机械电子、通用机械等众多领域。
它利用计算机软件建立机械系统的三维实体模型和运动学及动力学模型,分析和评估机械系统的性能,从而为机械产品的设计和制造提供依据。
虚拟样机技术可使产品设计人员在各种虚拟环境中真实地模拟产品整体的运动及受力情况,快速分析多种设计方案,进行物理样机而言难以进行或根本无法进行的试验,直到获得系统的最佳设计方案为止。
虚拟样机技术的应用贯穿着整个设计过程中,它可以用在概念设计和方案论证中,设计者可以把自己的经验与想象结合在虚拟样机里,让想象力和创造力得到充分地发挥。
用虚拟样机替代物理样机,不但可以缩短开发周期而且设计效率也得到了很大的提高。
本文以ADAMS为平台,简单说明一下进行虚拟样机的动态仿真分析的一般方法和过程。
2、ADAMS软件简介及特点ADAMS(Automatic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc,现已经并入美国MSC公司)开发的最优秀的机械系统动态仿真软件,是目前世界上最具权威性的,使用范围最广的机械系统动力学分析软件,在全球占有率最高。
Adams运动仿真例子起重机的建模和仿真
1起重机的建模和仿真,如下图所示。
1)启动ADAMS1。
运行ADAMS,选择create a new model;2。
modal name 中命名为lift_mecha;3。
确认gravity 文本框中是earth normal (—global Y),units文本框中是MKS;ok4. 选择setting-—working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口.2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4。
设置实体参数;On groundLength :12Height:4Depth:85。
鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7。
左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2。
25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting-working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount。
cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing-working grid ,设置spacing中X和Y均为0。
ADAMS仿真分析及调试
设置仿真分析输出
设置输出要求
• 获得位移、速度、加速度和力等4种类型的仿真结果
• 定义其他的输出量: 压力、功、能、动量
可以使用三种方法定义感兴趣的输出
• 选择ADAMS/Solver已经定义的位移、速度、加速度和力的输出
组,并指定参考坐标系
• 使用用户自定义的若干函数表达式定义所需的输出 • 使用用户自定义的子程序REQSUB来定义非标准的输出
5
7.3.1 仿真分析和试验工具
仿真 工具
仿 真 分 析 设 置
仿真分析设置
6
7.3.2 仿真分析和试验---互交式、
选择仿真类型
Default默认、Dynamic动力学、Kinematic运动学、Static静态
选择仿真分析时间的定义方法,输入仿真分析时间
• End Time ----定义停止的绝对时间 • Duration ---- 定义时间间隔
设置仿真过程中输出仿真结果的频率
• Step Size ----输出的时间步长 • Steps ----总共输出的步数
开始仿真分析
中途停止分析
中途停止分析
7
7.3.3 注意问题
如 果 中 途 停 止 分 析 , 然 后 再 按 快捷键开始分析,则 ADAMS/View将从上一次停止的位置接下去分析 如果希望从头开始分析,应该按快捷键,使仿真指针返 回到初始位置 如果希望从上一次分析结束的位置继续分析,采用 Duration定义仿真时间较为方便 在设置输出步长时应该注意:
各种对象的有关分量信息
• 运动副、原动机、载荷和弹性连接等产生的力和力矩(默认) • 构件的各种运动状态: 位移、方向角、速度、角速度、加速度、
角加速(默认质心位置)
基于ADAMS软件的摆动导杆机构的运动学分析
基于ADAMS软件的摆动导杆机构的运动学分析一、背景:摆动导杆机构是一种应用比较广泛的平面连杆机构,例如牛头刨床上就用了这种机构。
它将曲柄的旋转运动转换成为导杆的往复摆动。
机构相对简单易懂,对于我们初学ADAMS的学生来说便于建模和分析。
二、利用ADAMS的优点:对于摆动导杆机构的运动分析,常用的方法有图解法和解析法。
图解法:直观、方便,但精度不高,需要反复做图。
解析法:人工计算运算量大,容易出错。
利用ADAMS可以产生复杂机械系统的虚拟样机,真实地仿真其运动过程。
精确度很高,而且将计算工作交给计算机能省去大量人工,并且不容易出错。
三、建立力学模型:图中为摆动导杆机构曲柄AB为原动件导杆BC为从动件通过滑块B将曲柄AB的连续转动转变为导杆BC的往复摆动。
四、建立样机模型:首先是给定模型具体的参数:各杆的杆长以及曲柄AB的转速。
利用ADAMS建立样机:根据几何关系确定A、B、C三点的坐标,可以假定C为坐标原点从而确定模型。
再各零件之间建立相应的约束副。
固定副:机架转动副1:曲柄、机架转动副2:曲柄、滑块转动副3:导杆、机架移动副:滑块、导杆右图为理论的样机图下图为实际做的时候建立的样机图,比较理论的样机图,我没有专门建立一个杆将其锁为机架,而是直接在坐标轴上建立了2个点,将坐标轴当作了ac杆。
附图如下五、仿真分析:通过已经建立好的模型给出曲柄的转速,就可以利用ADAMS自动输出构件的位移、速度、加速度等详细的参数。
并且利用这些输出值可以通过ADAMS/View以图形形式输出,从而能清晰地看出他们在仿真过程中的变化规律。
六、具体参数:W=5rad/s AB(主动件)=100mm AC(固连机架的杆)=350mm七、输出图:本图为滑块的位移图。
图中红色线为x方向的位移。
蓝色线为y方向的位移,合成图为一直线。
从图中可以看出滑块进行往复运动,轨迹为一个圆。
本图为滑块的速度图。
图中红色线为x方向的速度。
蓝色线为y方向的速度,合成图为一直线。
第三章ADAMS仿真
3 双振动体惯性往复近共振筛的ADAMS动力学仿真分析3.1 多刚体动力学仿真分析软件ADAMS简介ADAMS是由美国MDI研发的对机械系统的运动学及动力学有强大分析功能的虚拟样机分析软件,它采用交互式图形环境和零件库、约束库、力库,建立完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
ADAMS软件由基本模块、扩展模块、借口模块、专业领域模块及工具箱组成。
用户不仅可以采用通用模块对一般的机械系统进行仿真,而且可以采用专用模块对特定工业应用领域的问题进行快速有效的建模和仿真分析。
其中基本模块主要包括以下几种:(1)用户界面模块(ADAMS/view)ADAMS/view是ADAMS系列产品的核心模块之一,提供了丰富的零件几何图形库、约束库和力/力矩库及图形快捷键和菜单快捷键,采用Parasolid作为实体建模的核,并且支持布尔运算,具有界面友好、操作方便的特点。
在建模过程中,ADAMS自动将相邻的实体赋予不同的颜色,以便区分,色彩渲染效果逼真。
模型的缺省材料为钢,而且各部分实体重心缺省位置在其形心,实体转动惯量由ADAMS根据实体尺寸以钢为缺省材料算出,上述属性均可由用户根据实际情况修改,用户甚至可以改变重力加速度的大小和方向(2)求解器模块(ADAMS/Solve)ADAMS/Solve可以对刚体和弹性体进行仿真分析。
为了进行有限元分析和控制系统研究,用户除要求软件输出位移、速度、加速度和力外,还可要求模块输出用户自己定义的数据。
用户可以通过运动副、运动激励、高副接触、用户定义的子程序等添加不同的约束。
用户同时可求解运动副之间的作用力和反作用力,或施加单点外力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS对单摆的建模与仿真分析
姓名:
班级:
学号:
单摆作业:
已知: 摆杆质量M1=0.002kg,小球质量M2=12kg, 摆杆长度
l=40.0cm, g=9.8m/s² ,初始摆角α=30º, 结束时间(End time):
5.0 , 步长(Steps ):500
一.建立单摆模型
1.设置参数
(1)通过开始程序菜单运行 ADAMS,运行 ADAMS。
(2)选择Create a new model 。
(3)确认Gravity (重力)文本框中是Earth Normal (-Global Y),Units(单位)文本框中是MMKS-mm,kg,N,s,deg,单击OK按钮。
(4)在Setting下拉菜单中选择Working Grid,系统打开参数设置对话框,在Spacing栏,X和Y项都输入10mm
2. 建立摆杆模型
(1)选择View菜单选择Coordinate Windows 命令,打开坐标窗口,以便查看模型尺寸。
(2)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :link工具(3)用鼠标左键单击Rigid Body :link工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part。
选中Length 选项,输入40cm,即单摆的长度。
选中Width选项,输入2.0cm。
选中 Depth选项,输入2.0cm。
(4)单击View中的Coordinate Window键,鼠标单击(0,400,0)作为单摆的左侧起点,然后单击右侧水平方向的任一点,ADAMS自动生成摆臂
3.设置摆臂位置
(1)在工具箱中选择定位图标。
(2)打开参数设置对话框,在Angle栏输入30,此时摆臂高亮显示。
(3)点击2次顺时针箭头,摆臂转向与竖直方向成30度方向。
4.建立球模型
(1)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :sphere工具(2)用鼠标左键单击Rigid Body:sphere 工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part
(3 )单击View中的Coordinate Window键,鼠标单击摆杆右端点作为球的中心点,自动生成一个球
5.设置摆臂和球的质量
(1)鼠标右键单击摆臂Part 2,在打开的右键快捷菜单中选择Modify,弹出修改对话框(2)在Define Mass By栏选择User Input。
(3)在Mass(质量)栏输入0.002kg。
(4)输入完毕单击OK按钮。
(5)根据上面步骤设置球的质量为12kg。
6.建立单摆支点
(1)在工具箱中选择铰接图标。
(2)系统打开参数设置对话框,确认在工具箱下方的Construction文本框中显示1 Location 和Normal To Grid。
(3)鼠标左键依次点击点击摆臂的左端点,ground,摆臂的左端点中心。
(4)在大地和摆臂之间生成一个铰接支点。
7.建立摆杆和球铰接
(1)在工具箱中选择铰接图标。
(2)系统打开参数设置对话框,确认在工具箱下方的Construction文本框中显示2Bod —1Loc和Normal To Grid。
(3)鼠标左键依次点击点击摆臂的左端点,球,摆臂的右端点中心。
(4)在球和摆臂之间生成一个铰接支点。
二.验证模型及仿真
模型建立以后,需要验证模型,确定模型中是否存在一些错误条件,如不匹配的链接、无约束的部件、动力系统中无质量部件等。
(1)右键单击状态栏右侧的信息按钮,在弹出的级联按钮中选择验证按钮。
(2)在弹出的信息窗口中,显示模型的相关信息,验证刚体的个数、约束个数、自由度以及其他参数
(3)点击工具箱中的仿真图标,系统打开参数设置对话框,将End Time设为5.0,Steps设为500。
(4)点击开始按钮,单摆开始摆动,测量窗口出现测量曲线
位移、速度、加速度仿真曲线
角度、角速度、角加速度仿真曲线
三.计算结果、仿真结果及其验证
1.通过计算结果和仿真结果进行比较,进行验证。
计算:对小球进行受力分析,小球在重力作用下进行单摆运动。
1)、周期T=2π√(l/g ) =1.27 s
2)、速度分析
小球在最低点α=0°时,加速度为0,重力势能全部转化为动能,速度最大:
由Mg∆h=1/2Mv²得v=2√g∆h ,而∆h=l(1-cosα)
当α=0º时,带入上式,可知速度 vmax=1.025m/s ;当α=30º时,带入上式,可知速度 v=0 m/s 3)、加速度分析
在重力作用下,小球在最高点处的切向加速度为:at=gsinα
将其分解为水平方向的加速度: ax =atcosα=gsinα∗cosα=0.5gsin2α
当α=0°时 ax =0 m/s²;当α=30º时,ax =4.244 m/s²
4)、角速度分析
速度角速度转化公式:V=rω
当α=0º时,角速度ω=v/r=3.364 rad/s ;当α=30º时,角速度ω=0 rad/s
5)、角加速度分析
切向加速度与角加速度的关系:at=α∗r
当α=30°时α=at/r=4.243/0.4=10.608 rad/s²;当α=0°时α=0 rad/s²
(m/
)
2.误差分析
相对误差=▏测量值-计算值▕/计算值×100%
ΔT= ▏1.28-1.27▕/1 .27×100%=0.787%
Δs = ▏0.2055-0.2▏/0.2-×100%=2.75%
Δv= ▏1.01-1.025▏/1.025×100%=1.468%
Δa= ▏4.177-4.244▏/4.244×100%=1.58%
Δω= ▏2.537-2.563▏/2.563×100%=1.01%
Δα = ▏11.93-10.61▏/10.61×100%=12.4%
结论:对仿真结果进行分析得通过上边的误差计算分析,可看出周期、位移、速度、加速度、角速度误差均在允许范围内,发现其结果相差很小,几乎可以忽略不计,故可以认为模拟仿真的结果是正确的。
角加速度误差较大,可能引起的原因是初始角度较大。