哈尔滨工业大学嵌入式系统课程考试知识点整理
嵌入式期末考试简答题库
嵌入式期末考试简答题库1. 什么是嵌入式系统?嵌入式系统是一种特殊的计算机系统,它将硬件和软件紧密集成,用于控制、监测或执行特定功能。
这些系统通常运行在具有固定功能的设备上,例如手机、家电、汽车等。
嵌入式系统的设计注重可靠性、高效性和节能性。
2. 嵌入式系统和通用计算机的主要区别是什么?嵌入式系统和通用计算机的主要区别在于设计目标和应用场景。
通用计算机旨在满足各种不同需求的用户,而嵌入式系统则专注于特定的任务和功能。
嵌入式系统通常运行在资源受限的环境中,如内存、处理能力和功耗等方面有严格要求。
3. 请简要描述嵌入式系统的基本组成部分。
嵌入式系统的基本组成部分包括处理器(CPU)、内存、输入/输出设备(I/O)和操作系统。
处理器负责执行程序,内存用于存储数据和指令,I/O设备用于与外部环境交互,操作系统提供运行环境和资源管理。
4. 请解释嵌入式系统中的实时性是什么意思。
实时性是指嵌入式系统对任务处理的时限要求。
实时系统可以分为硬实时和软实时两种。
硬实时系统要求任务必须在给定的时间限制内完成,否则会导致系统故障。
软实时系统对任务执行的时限有一定宽容度,延迟会影响系统性能,但不至于导致系统故障。
5. 请简述嵌入式系统中的中断是什么,并说明其应用场景。
中断是一个突发事件,可以打断正在执行的程序,切换到中断服务程序进行处理。
嵌入式系统中的中断广泛应用于实时响应外部事件和设备的交互。
例如,当传感器探测到变化时,可以通过中断请求及时处理该事件,从而提高系统的实时性能和灵活性。
6. 请简要描述嵌入式系统中的控制循环是什么,并说明其应用场景。
控制循环是指嵌入式系统中用于控制和执行特定任务的主要代码段。
控制循环通常由一个主循环和若干子循环组成,用于检测外部事件、执行任务和更新系统状态。
应用场景包括自动控制系统、工业机械和无人驾驶等。
7. 请解释移植性在嵌入式系统中的含义,并说明其重要性。
移植性是指将嵌入式系统的软件和硬件在不同平台之间进行迁移和适应的能力。
嵌入式系统相关知识点总结
嵌入式系统相关知识点总结第一篇:嵌入式系统相关知识点总结嵌入式系统的定义及特点定义:嵌入式系统是以应用为中心、以计算机技术为基础,软、硬件可裁剪,适应于应用系统对功能、可靠性、成本、体积、功耗等方面有特殊要求的专用计算机系统。
特点:(1)嵌入式系统是面向特定应用的。
嵌入式系统中的CPU 是专门为特定应用设计的,具有低功耗、体积小、集成度高等特点,能够把通用CPU中许多由板卡完成的任务集成在芯片内部,从而有利于整个系统设计趋于小型化。
(2)嵌入式系统涉及先进的计算机技术、半导体技术、电子技术、通信和软件等各个行业。
是一个技术密集、资金密集、高度分散、不断创新的知识集成系统。
(3)嵌入式系统的硬件和软件都必须具备高度可定制性。
(4)嵌入式系统的生命周期相当长。
嵌入式系统和具体应用有机地结合在一起,其升级换代也是和具体产品同步进行的。
(5)嵌入式系统本身并不具备在其上进行进一步开发的能力。
在设计完成以后,用户如果需要修改其中的程序功能,必须借助于一套专门的开发工具和环境。
(6)为了提高执行速度和系统可靠性,嵌入式系统中的软件一般都固化在存储器芯片或单片机中,而不是存贮于磁盘等载体中。
特点也可答:1.系统内核小。
2.专用性强。
3.系统精简。
4.高实时性的系统软件(OS)是嵌入式软件的基本要求。
5.嵌入式软件开发要想走向标准化,就必须使用多任务的操作系统。
6.嵌入式系统开发需要开发工具和环境。
7.嵌入式系统与具体应用有机结合在一起,升级换代也是同步进行,所以具有较长的生命周期。
8.为了提高运行速度和系统可靠性,嵌入式系统中的软件一般都固化在存储器芯片中。
操作系统在嵌入式系统中所起的作用(四个)嵌入式操作系统(嵌入式linux学习)的功能嵌入式操作系统除具备了一般操作系统(嵌入式linux系统)最基本的功能,如任务调度、同步机制、中断处理、文件处理等外,还有以下两个方面的功能:1.构成一个易于编程的虚拟机平台嵌入式操作系统构成一个虚拟机平台,EOS把底层的硬件细节封装起来,为运行在它上面的软件(如中间件软件和各种应用软件)提供了一个抽象的编程接口。
嵌入式系统课程总结和期末考试复习课件
2020/2/26
大端格式(big-endian):字数据的高字节存储在低地址中, 而字数据的低字节则存放在高地址中。
状态切换方法
ARM指令集和Thumb指令集均有切换处理器状态 的指令,并可在两种工作状态之间切换,
在开始执行代码时,应该处于ARM状态。
•两种状态的切换 程序执行过程中,通过执行带状态切换的分支指令
BX,随时在两种工作状态之间进行切换。并且处理器 工作状态的转变,并不影响处理器的工作模式和相应 寄存器中的内容。
单片机属于嵌入式系统,故嵌入式系统的历史已经 有几十年。
单片机与嵌入式系统有区别,只有嵌入式系统的部 分结构和部分功能:
1)单片机数据处理能力有限、处理速度有限,不 能够用于所有的嵌入式系统
2)单片机不使用操作系统 3)单片机无网络功能
2微处理器(MPU)
◆ 嵌入式微处理器(Micro Processor Unit)是由 通用计算机中的CPU演变而来的,80386-80387
Chip)
5 可编程片上系统(SOPC)(System On Programmable
Chip)
1.微控制器(MCU):
◆ 嵌入式微控制器的典型代表是单片机这种8位的处 理器,目前仍然有广泛的应用。 ◆ 单片机芯片内部集成ROM/EPROM、RAM、总线 逻辑、定时/计数器、I/O、串行口、EEPROM 等 各种必要功能和外设。
2020/2/26
第四阶段 以基于网络操作为标志的嵌入式系统,这是一个正在
迅速发展的阶段。
2020/2/26
1.3 嵌入式处理器
嵌入式系统的核心部件是嵌入式处理器,据不完全统 计,全世界大约有1000多种嵌入式处理器,流行的体系 结构有30多个系列。如MCS-51、PIC、AVR、ARM、 DSP等,其中MCS-51占了多半,生产厂家20多个, 350多种衍生产品,仅Philips就有近百种。处理速度从 0.1MIPS到2000MIPS,寻址空间从64KB到4GB。
嵌入式系统期末考点(工大相国版)
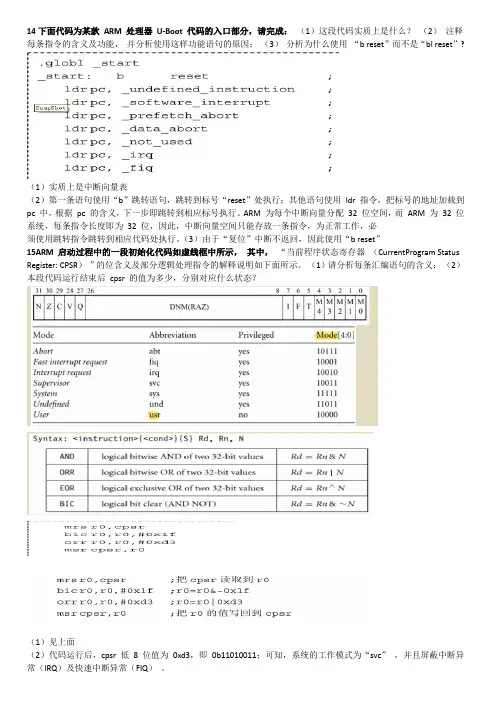
14下面代码为某款ARM 处理器U-Boot 代码的入口部分,请完成:(1)这段代码实质上是什么?(2)注释每条指令的含义及功能,并分析使用这样功能语句的原因;(3)分析为什么使用“b reset”而不是“bl reset”?(1)实质上是中断向量表(2)第一条语句使用“b”跳转语句,跳转到标号“reset”处执行;其他语句使用ldr 指令,把标号的地址加载到pc 中,根据pc 的含义,下一步即跳转到相应标号执行。
ARM 为每个中断向量分配32 位空间,而ARM 为32 位系统,每条指令长度即为32 位,因此,中断向量空间只能存放一条指令,为正常工作,必须使用跳转指令跳转到相应代码处执行。
(3)由于“复位”中断不返回,因此使用“b reset”15ARM 启动过程中的一段初始化代码如虚线框中所示,其中,“当前程序状态寄存器(CurrentProgram Status Register: CPSR)”的位含义及部分逻辑处理指令的解释说明如下面所示。
(1)请分析每条汇编语句的含义;(2)本段代码运行结束后cpsr 的值为多少,分别对应什么状态?(1)见上面(2)代码运行后,cpsr 低8 位值为0xd3,即0b11010011;可知,系统的工作模式为“svc”,并且屏蔽中断异常(IRQ)及快速中断异常(FIQ)。
1“嵌入式系统”的“专用性”含义有哪些?(1)完成特定任务;(2)功能定制、可剪裁;(3)“够用即可”的实用原则2计算机软件中的“系统软件”包括哪些?Bootloader 操作系统3为什么绝大多数DSP 处理器采用哈佛(Harvard)结构?哈佛结构具有独立的数据存储空间及总线,便于数据处理的高速吞吐4请问SRAM、DRAM 和SDRAM 分别是什么含义?SRAM 表示“静态随机存储器(Static Random Access Memory)”;DRAM 表示“动态随机存储器(Dynamic Random Access Memory)”;SDRAM 表示“同步动态随机存储器(Synchronous DRAM)”5可以从不同角度看待一个I/O 接口,比如信号线、通信协议或寄存器组,如何理解它们之间的关系?信号线提供物理通道;通信协议规定信号的编码规则及时序;寄存器为处理器访问I/O 的窗口6如何理解RISC 处理器的LOAD/STORE 模式?RISC处理器的LOAD/STORE模式的含义是CPU对数据的操作直接在寄存器中进行,因此,需要专门的LOAD 指令从内存读取数据,以及STORE 指令把数据写回内存7ARM 处理器的数据类型包括“字节(Byte)”,“半字(Halfword)”及“字(Word)”,请问:(1)“字节(Byte)”,“半字(Halfword)”及“字(Word)”分别是什么含义?(2)假如以“半字(Halfword)”对齐方式给某变量a 分配空间,那么,a 的地址有什么特点?(3)假如以“字(Word)”对齐方式给某变量a 分配空间,那么,a 的地址有什么特点?“字节(Byte)”数据位数为8 位“半字(Halfword)”数据位数为16 位;“字(Word)”数据位数为32 位;地址的最低位为0地址的最低两位均为08在ARM 处理器的通用寄存器中,r13,r14 及r15 有特殊用途,请问r13,r14 及r15 的别名及作用分别是什么?r13 的别名“栈指针(Stack Pointer: SP)”,用作栈结构的栈顶指针;r14的别名“链接寄存器(Link register: LR)”,用于子程序执行时保存PC 值;r15 的别名“程序计数器(Program counter: PC)”,指向“正在取指”的指令9在ARM 处理器的寄存器使用中,“当前程序状态寄存器(Current Program Status Register:CPSR)”和“保存程序状态寄存器(Saved Program Status Register: SPSR)”之间是什么关系?当发生异常需要跳转到相应中断向量执行时,不但要保存PC 的值,也需要保存状态寄存器的值,SPSR 专门用于保存CPSR 的值。
本科期末考试《嵌入式系统原理及应用》最终版整理复习要点
嵌入式复习大纲第一章1、嵌入式系统定义及概念:嵌入式系统是以应用为中心、以计算机技术为基础、软硬件可裁减、功能、可靠性、成本、体积、功耗严格要求的专用计算机系统2、嵌入式系统的特点:(3个)1)嵌入式系统通常是面向特定应用的;2)嵌入式系统功耗低、体积小、集成度高、成本低;3)嵌入式系统具有较长的生命周期;4)嵌入式系统具有固化的代码;3、嵌入式处理器的分类:1)嵌入式微处理器(EMPU);2)嵌入式微控制器(EMCU);3)嵌入式DSP处理器(EDSP);4)嵌入式片上系统(ESoC)。
4、嵌入式系统的组成:由硬件层、中间层、系统软件层和应用软件层组成。
(1)硬件层中包含嵌入式微处理器、存储器(SDRAM、ROM、Flash等)、通用设备接口和I/O接口(A/D、D/A、I/O等)(2)硬件层与软件层之间为中间层,也称为硬件抽象层,该层一般包含相关底层硬件的初始化、数据的输入/输出操作和硬件设备的配置功能。
BSP具有以下两个特点。
(3)系统软件层由实时多任务操作系统、、文件系统、图形用户接口、网络系统及通用组件模块组成。
5、嵌入式操作系统:嵌入式实时操作系统µC/OS-II、嵌入式Linux、Windows Embedded、VxWorks、pSOS、等,以及应用在智能手机和平板电脑的Android、iOS等6、嵌入式系统的设计方法:(需交叉编译和调试环境)(1)系统定义与需求分析(2)系统设计方案的初步确立(3)初步设计方案性价比评估与方案评审论证(4)完善初步方案、初步方案实施(5)软硬件集成测试(6)系统功能性能测试及可靠性测试第二章1、ARM的CISC、RISC ARM7~ARM9(1)CISC特点:复杂指令、各种类型的内存寻址方式、微程序结构、效率高(2)RISC特点:固定指令长度、指令流水线处理、简化内存管理、硬件接线式控制、单周期执行、复杂度存于编译程序内(3)冯诺依曼结构:输入输出设备、运算器、控制器、存储器主要贡献:提出并实现了“存储程序”的概念2、ARM7:采用3级流水线结构,采用冯诺依曼结构(程序存储与数据存储统一编址)ARM9:采用5流水线结构,采用哈弗体系结构(程序存储器与数据存储器分开独立编址)ARM10:采用6流水线结构,采用哈弗体系结构ARM11:采用8流水线结构,采用哈弗体系结构3、ARM体系结构的技术特征:(1)单调周期操作(2)采用加载/存储指令结构(执行速度快)(3)固定32位指令(结构简单、效率高)(4)地址指令格式(三地址指令格式,优化代码)(5)指令流水线技术(提高执行效率)4、ARM的三种工作状态,如何标记?(1)ARM状态:32位,ARM状态下执行字对准的32位ARM指令;(2)Thumb状态:16位,Thumb状态下执行半字对准的16位Thumb指令。
嵌入式系统基础知识考试

嵌入式系统基础知识考试(答案见尾页)一、选择题1. 嵌入式系统的核心是什么?A. 中央处理器(CPU)B. 内存(RAM)C. 输入输出设备D. 操作系统和软件2. 嵌入式系统的显著特点包括:A. 低功耗B. 高性能C. 可定制性D. 上下文感知3. 在嵌入式系统中,通常使用哪种编程语言进行开发?A. 汇编语言B. C语言C. JavaD. Python4. 嵌入式系统通常用于哪些领域?A. 消费电子产品B. 工业控制系统C. 汽车电子D. 以上都是5. 下列哪个不是嵌入式系统的组成部分?A. 微控制器(MCU)B. 存储器C. 显示屏D. 键盘和鼠标6. 在嵌入式系统设计中,硬件和软件是如何相互作用的?A. 硬件负责数据处理和控制,软件负责程序执行和用户交互。
B. 软件负责硬件管理,硬件负责数据存储和处理。
C. 硬件和软件完全独立,互不干扰。
D. 硬件和软件相互依赖,共同工作。
7. 嵌入式系统中的实时性是指什么?A. 系统能够在预定时间内响应外部事件。
B. 系统能够处理大量数据。
C. 系统具有高度可扩展性。
D. 系统具有高可靠性。
8. 在嵌入式系统开发过程中,调试是一个重要环节。
常用的调试方法有哪些?A. 使用调试器B. 使用打印语句C. 使用模拟器D. 以上都是9. 嵌入式系统的低功耗设计通常涉及哪些方面?A. 选择低功耗的微处理器B. 优化代码以减少能耗C. 使用高效的电源管理模块D. 以上都是10. 在嵌入式系统应用中,如何确保系统的安全性和可靠性?A. 使用高质量的组件和材料B. 定期进行系统更新和维护C. 实施严格的安全措施,如防火墙和加密技术D. 以上都是11. 嵌入式系统的基本工作原理是什么?A. 单任务处理B. 多任务处理C. 实时处理D. 分布式处理12. 嵌入式系统的硬件通常包括哪些组件?A. CPU、内存、I/O设备B. CPU、内存、操作系统C. CPU、内存、软件D. CPU、内存、网络接口卡13. 下列哪个不是嵌入式系统的特点?A. 低功耗B. 高性能C. 紧凑的存储空间D. 可靠性高14. 在嵌入式系统中,常用的操作系统有哪些?A. Windows CEB. LinuxC. VxWorksD. all of the above15. 嵌入式系统中的软件通常分为哪几类?A. 系统软件和应用软件B. 驱动程序、中间件和应用软件C. 系统软件、中间件和应用软件D. 操作系统、驱动程序和应用软件16. 在嵌入式系统的开发过程中,常用的编程语言有哪几种?A. CB. C++C. JavaD. Python17. 嵌入式系统在智能家居中的应用有哪些?A. 智能家电控制B. 安全监控C. 能源管理D. 上述所有18. 在设计嵌入式系统时,需要考虑的主要因素有哪些?A. 性能、成本、可用性B. 成本、功耗、安全性C. 性能、功耗、安全性D. 性能、成本、安全性19. 嵌入式系统的特点是?A. 高度集成B. 高速运行C. 易于维护D. 以上都是20. 嵌入式系统中的“嵌入式”一词指的是什么?A. 系统可以嵌入其他系统中B. 系统可以独立运行C. 系统体积小,适合嵌入其他设备中D. 系统对外部环境敏感21. 在嵌入式系统中,哪种类型的存储器通常用于存储程序和数据?A. 随机存取存储器(RAM)B. 只读存储器(ROM)C. 闪存(Flash Memory)D. 硬盘驱动器(HDD)22. 嵌入式系统开发中常用的编程语言有哪几种?A. C语言B. C++C. JavaD. Python23. 在嵌入式系统设计中,硬件和软件的协同工作是非常重要的。
嵌入式期末复习提纲(包含答案)
欢迎共阅考试题型:•1、判断题 10分•2、填空题 20分•3、选择题 20分•4、简答题 30分(5个)•5、应用题 20分(3个)•6、名字解释复习资料:•书本•PPT课件,平时课堂例题。
•平时作业和练习•考试范围:1-5章•其他说明:•课后习题是重点。
•简答题来源于前5章,每章一个。
每章重点:第一章:1.什么是嵌入式系统?试简单列举一些生活中常见的嵌入式系统的实例。
?嵌入式系统是用于检测、控制、辅助、操作机械设备的装置。
以应用为中心,一计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积和功耗等严格要求的专用计算机系统。
2.嵌入式系统具有哪些特点?3.嵌入式系统由哪些部分组成?简单说明各部分的功能和作用。
4.嵌入式系统是怎样分类的?5.嵌入式系统的定义。
嵌入式系统是用于检测、控制、辅助、操作机械设备的装置。
以应用为中心,一计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积和功耗等严格要求的专用计算机系统。
6.什么是交叉编译,试说明交叉编译的实现过程。
7.嵌入式系统有哪些应用领域。
嵌入式系统技术具有非常广阔的应用前景,其应用领域可以包括:???1.工业控制:???基于嵌入式芯片的工业自动化设备将获得长足的发展,目前已经有大量的8、16、32?位嵌入式微控制器在应用中,网络化是提高生产效率和产品质量、减少人力资源主要途径,如工业过程控制、数字机床、电力系统、电网安全、电网设备监测、石油化工系统。
就传统的工业控制产品而言,低端型采用的往往是8位单片机。
但是随着技术的发展,32位、64位的处理器逐渐成为工业控制设备的核心,在未来几年内必将获得长足的发展。
???2.交通管理:???在车辆导航、流量控制、信息监测与汽车服务方面,嵌入式系统技术已经获得了广泛的应用,内嵌GPS模块,GSM模块的移动定位终端已经在各种运输行业获得了成功的使用。
目前GPS设备已经从尖端产品进入了普通百姓的家庭,只需要几千元,就可以随时随地找到你的位置。
(完整word版)嵌入式系统复习内容(答案整理)(word文档良心出品)
第一章嵌入式系统概述1.嵌入式系统是什么?目前,对嵌入式系统的定义多种多样:IEEE(国际电气和电子工程师协会)的定义为:用于对机器和设备进行控制,监视或者辅助操作的装置。
从技术的角度定义:以应用为中心,以计算机为基础,并且软硬件可裁剪,适用于对功能、可靠性、成本、体积和功耗有严格要求的专用计算机系统。
从系统的角度定义:嵌入式系统是完成复杂功能的硬件和软件,并使之紧密耦合在一起的计算机系统。
嵌入式系统是指嵌入式操作系统和功能软件集成在以微控制器或微处理器为核心的微型计算机硬件体系中所形成的简单便捷,稳定可靠,机电一体化产品整体。
简单地说,嵌入式系统是软件体系和硬件体系紧密结合的一体化系统。
2.嵌入式系统由哪几个部分组成?嵌入式系统由硬件平台和系统软件组成。
硬件平台指嵌入式处理器和与之通过接口连接的外围硬件平台。
系统软件指实时操作系统和用户应用软件。
3.嵌入式微(?)处理器有几种类型?各有什么特点?嵌入式微处理器(EMPU):比较适合于大容量的数据计算和处理,具有体积小、重量轻、成本低、可靠性高的优点。
与嵌入式控制器相比,速度快,运算功能强大,可对各类数据进行快速处理。
嵌入式微控制器(EMCU):比较适合于基于逻辑运算和简单数据计算结果的控制,最大特点是单片化,体积大大减小,从而使功耗和成本下降,可靠性提高。
嵌入式DSP(EDSP):对系统结构和指令的某些部分进行了特殊设计,使之适合于执行DSP 算法,编译效率较高,指令执行速度也较快。
总而言之,就是运算速度快。
嵌入式片上系统(ESOC):根据应用系统设计者定义,可以在一个硅片上集成一个更为复杂的系统。
整个嵌入式系统的大部分尽可集成到一块或几块芯片上,应用系统电路板将变得很整洁,对于减少体积和功耗,提高可靠性十分有益。
4.你能列举几种熟悉的操作系统吗?µCOS-Ⅱ,µCLinux,WinCE,VxWorks,TRON,µITRON,eCos,Nucleus,OSE等。
哈工大《嵌入式系统设计》复习题参考答案
诺依曼体系和哈佛体系的区别就是程序空间和数据空间是否是一体的。
早期的微处理器大多采用冯诺依曼结构,典型代表是Intel公司的取指和取操作数都在同一总线上,通过分时服用的方式进行的。
缺点是在高速运行要将系统描述为一组并发执行的任务,可以使用表达并发进程模型的语言来描述,然后根据这个描述生成实现。
实现是系统功能在硬件处理器上的一种映射,其中系统功能用一个或多个计算模型来表达,并用一种或多种语言来编写。
程序语言的选择与实现无关,使用某种语言可能是因为这种语言能表达用于描述系统的计算模型,选择某种实现则可能是因为这种实现能满足功率、时序、性能和成本等系统要求。
一旦得到最后的实现,设计者就可以执行该系统,观察其行为,测量其所关注的设计指标,并决定该实现是否可行,最后的实现也可以作为最终产品大批量生产时的蓝图或雏形。
发明进程的原因是,有些系统的行为实际上是由多个独立的自行为构成的。
而要用时序模型把这几个部分描述为单个时序程序会相当困难。
在此,使用多个时序程序分别描述多个部分,表明其可以并发执行。
但不想要多个完全独立的程序。
因为多个程序实际上要进行通信。
并发进程模型可以达到这个目标,在这个模型中,进程就是多个时序程序中的一个程序。
进程的传统定义是一个执行单位,一个进程与模型中的其他进程并发执行,通常被看作是一个无穷循环,不断地执行其时序语句。
7. 简述NOR 技术和NAND 技术闪存的特点。
NOR 和NAND 是现在市场上两种主要的非易失闪存技术。
NOR 技术 Flash Memory 具有以下特点:NOR 技术闪速存储器是最早出现的Flash Memory ,目前仍是多数供应商支持的产品,它源于传统的EPROM 器件。
与其它Flash Memory 技术相比,具有可靠性高、随机读取速度快的优势,但擦除和写的速度较NAND Flash 慢。
在擦除和编程操作较少而直接执行代码(XIP , eXecute In Place )的场合,尤其是代码(指令)存储的应用中广泛使用。
哈尔滨工业大学嵌入式系统课程考试知识点
2011年秋季嵌入式系统课程复习提纲整理人:工大A02-6068寝FuriO .CChapter 11、嵌入式系统的定义,嵌入式系统的体系构造,嵌入式系统的组成,嵌入式系统的特点。
定义:以应用为中心,以计算机技术为根底,软硬件可以剪裁,适应应用系统对功能、可靠性、本钱、体积、重量、功耗严格要求的专用计算机系统。
简而言之,就是含有处理器的专用软硬件系统,具有自主信息处理能力。
体系构造:硬件层->中间层->操作系统层->应用层硬件层:嵌入式处理器、储存器系统、中断控制器、定时/计时器、DMAC、UART、USB控制器、LCD控制器中间层:板级支持包操作系统层:嵌入式操作系统〔文件子系统、图形子系统、网络子系统、其他应用模块〕应用层:用户应用程序组成:嵌入式系统主要由嵌入式处理器、外围设备、嵌入式操作系统、用户应用软件系统四局部组成。
特点:嵌入专用、综合性强、设计高效、程序固化、需要独立开发系统、生命周期长、可靠性高、本钱低、资源受限、功耗低。
2、嵌入式处理器的构造:哈佛构造Vs冯诺依曼构造。
哈佛构造:将程序指令和数据分开储存构造;存储器地址独立编址、独立;四总线制提高吞吐率〔程序、数据分别有相对独立的数据和地址总线〕;取值与执行能力并行。
冯诺依曼构造:指令存储器与数据存储器一体化设计;指令地址和数据地址统一编制;高速运算时,存储传输通道有瓶颈。
3、信息存储中的大端模式,小端模式。
ARM处理器支持哪种模式?大端储存:低地址储存字数据的高字节。
小端储存:低地址储存字数据的低字节。
arm处理器支持这两种储存模式。
4、嵌入式处理器的分类及性能特点。
分类:嵌入式微控制器、嵌入式微处理器、嵌入式DSP处理器、嵌入式片上系统~微处理器:嵌入式处理器保存和嵌入式应用严密相关的功能硬件,去除其他的冗余功能局部,这样就以最低的功耗和资源实现嵌入式应用的特殊要求。
和工业控制计算机相比,嵌入式微处理器具有体积小、重量轻、本钱低、可靠性高的优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20XX年秋季嵌入式系统课程复习提纲整理人:工大A02-6068寝FuriO .CChapter 11、嵌入式系统的定义,嵌入式系统的体系结构,嵌入式系统的组成,嵌入式系统的特点。
定义:以应用为中心,以计算机技术为基础,软硬件可以剪裁,适应应用系统对功能、可靠性、成本、体积、重量、功耗严格要求的专用计算机系统。
简而言之,就是含有处理器的专用软硬件系统,具有自主信息处理能力。
体系结构:硬件层->中间层->操作系统层->应用层硬件层:嵌入式处理器、储存器系统、中断控制器、定时/计时器、DMAC、UART、USB控制器、LCD控制器中间层:板级支持包操作系统层:嵌入式操作系统(文件子系统、图形子系统、网络子系统、其他应用模块)应用层:用户应用程序组成:嵌入式系统主要由嵌入式处理器、外围设备、嵌入式操作系统、用户应用软件系统四部分组成。
特点:嵌入专用、综合性强、设计高效、程序固化、需要独立开发系统、生命周期长、可靠性高、成本低、资源受限、功耗低。
2、嵌入式处理器的结构:哈佛结构Vs冯诺依曼结构。
哈佛结构:将程序指令和数据分开储存结构;存储器地址独立编址、独立访问;四总线制提高吞吐率(程序、数据分别有相对独立的数据和地址总线);取值与执行能力并行。
冯诺依曼结构:指令存储器与数据存储器一体化设计;指令地址和数据地址统一编制;高速运算时,存储传输通道有瓶颈。
3、信息存储中的大端模式,小端模式。
ARM处理器支持哪种模式?大端储存:低地址储存字数据的高字节。
小端储存:低地址储存字数据的低字节。
arm处理器支持这两种储存模式。
4、嵌入式处理器的分类及性能特点。
分类:嵌入式微控制器、嵌入式微处理器、嵌入式DSP处理器、嵌入式片上系统~微处理器:嵌入式处理器保留和嵌入式应用紧密相关的功能硬件,去除其他的冗余功能部分,这样就以最低的功耗和资源实现嵌入式应用的特殊要求。
和工业控制计算机相比,嵌入式微处理器具有体积小、重量轻、成本低、可靠性高的优点。
~微控制器(单片机):和嵌入式微处理器相比,微控制器的最大特点是单片化,体积大大减小,从而使功耗和成本下降、可靠性提高。
微控制器是目前嵌入式系统工业的主流。
微控制器的片上外设资源一般比较丰富,适合于控制,因此称微控制器。
~DSP处理器:DSP处理器是专门用于信号处理方面的处理器,其在系统结构和指令算法方面进行了特殊设计,具有很高的编译效率和指令的执行速度。
在数字滤波、FFT、谱分析等各种仪器上DSP获得了大规模的应用。
其运算速度比MPU快了几十倍,在语音合成和编码解码器中得到了广泛应用。
~片上系统:SOC最大的特点是成功实现了软硬件无缝结合,直接在处理器片内嵌入操作系统的代码模块。
而且SOC具有极高的综合性,在一个硅片内部运用VHDL等硬件描述语言,实现一个复杂的系统。
用户不需要再像传统的系统设计一样,绘制庞大复杂的电路板,一点点的连接焊制,只需要使用精确的语言,综合时序设计直接在器件库中调用各种通用处理器的标准,然后通过仿真之后就可以直接交付芯片厂商进行生产。
由于绝大部分系统构件都是在系统内部,整个系统就特别简洁,不仅减小了系统的体积和功耗,而且提高了系统的可靠性,提高了设计生产效率。
5、常见的嵌入式操作系统。
哪种应用最广泛?常见嵌入式操作系统:嵌入式Linux,WindowsCE,VxWorks目前应用最广泛的是Linux6、嵌入式系统性能评价有何特点。
流行的测试基准有哪些。
性能评价特点:评价没有统一规范,不同目的、不同人员、采取不同的度量项目和测试方法,对测试结果会有不同的解释。
流行的测试基准:MIPS测试基准、Dhrystone测试基准,EEMBC测试向量Chapter 21、嵌入式系统设计方法,嵌入式系统设计特点。
嵌入式系统设计方法:基于EDA(PCB)和ICE的设计方法基于EDA(PLD)和EOS的设计方法基于IP核的系统级设计方法嵌入式系统设计特点(与通用系统设计相比):嵌入式系统通常是面向特定应用的系统软/硬件协同并行开发需要交叉开发环境可利用的系统资源相对较少实时嵌入式操作系统的多样性程序需要固化到硬件系统中嵌入式软件开发难度较大2、嵌入式硬件设计需要考虑哪些方面,处理器选择时需要考虑哪些方面。
嵌入式硬件设计:体系结构设计、硬件选择、硬件布局处理器选择:应用领域与用户需求,性能,工具链,开发难度,I/O接口,处理器储存系统选择(MMU,容量,SDRAM),市场因素(价格、是否易购买,技术支持与售后)3、什么是交叉编译,为什么需要交叉编译。
交叉编译:简单的说,就是在一个平台上生成另一平台所运行的代码。
由于嵌入式系统的可用资源有限,嵌入式开发和调试工作通常要通过高性能的宿主机完成。
4、解释jtag。
JTAG:JTAG(Joint Test Action Group;联合测试行动小组)是一种国际标准测试协议(IEEE 1149.1兼容),主要用于芯片内部测试。
现在多数的高级器件都支持JTAG协议,如DSP、FPGA器件等。
标准的JTAG接口是4线:TMS、TCK、TDI、TDO,分别为模式选择、时钟、数据输入和数据输出线。
5、嵌入式系统软件调试方法有哪几种。
嵌入式系统软件调试方法:1,插桩调试法(stub,在目标操作系统和调试器内分别加入某些功能模块,二者互通信息来进行调试);2,直接调试法;3,ROM仿真调试法(运行在目标机的Flash或ROM的一段程序负责监控目标机上被调试程序的运行情况通过和宿主机的配合,完成嵌入式系统的调试);4,模拟器法(是一组应用程序运行于一个OS之上(Linux或windows)提供对目标板功能的模拟);Chapter 31、ARM处理器特点。
>功耗低、成本低、性能高>支持Thumb(16位)/ARM(32位)双指令集>指令长度固定(32位/16位)>大量使用寄存器,指令执行速度更快>寻址方式灵活简单,执行效率高2、ARM处理器的各系列情况。
>通用系列ARM7系列极低的功耗(0.28mW/MHz),适合对功耗要求较高的应用;具有嵌入式ICE-RT逻辑,调试开发方便;能够提供0.9MIPS/MHz的三级流水线结构;支持的操作系统:uC/OS-II、uCLinux等;性能最高可达130MIPS;ARM7TMDI是目前使用最广泛的32位嵌入式处理器,属低端ARM处理器核;ARM9系列5级整数流水线,指令执行效率更高;提供1.1MIPS/MHz的加速能力;全性能的MMU,支持Windows CE、Embedded Linux等;支持数据Cache和指令Cache;性能最高可达300MIPS;ARM9E系列支持DSP指令集(MAC);5级整数流水线,指令执行效率更高;支持VFP9浮点处理协处理器;全性能的MMU,支持Windows CE、Embedded Linux等;支持数据Cache和指令Cache;性能最高可达300MIPS;ARM10E系列支持DSP指令集(MAC);6级整数流水线,指令执行效率更高;支持VFP10浮点处理协处理器;全性能的MMU,支持Windows CE、Embedded Linux;支持数据Cache和指令Cache;性能最高可达400MIPS;ARM11系列高性能8级流水;增强的ARMv6体系结构;与同等的ARM10相比较,在同样的时钟频率下,性能提高了近50%;时钟频率达到500~750MHz;低功耗ARM11系列微处理器采用了两种先进的节能方式,使其功耗极低;0.6mW/MHz (0.13µm, 1.2V);Cortex系列ARM Cortex-A Series——高性能应用Applications processors for complex OS and user applications支持ARM、Thumb和Thumb-2指令集带MMU,运行Linux、Windows CE等操作系统TI OMAP35xx,ST(意法半导体)ARM Cortex-R Series——实时性应用Embedded processors for real-time systems支持ARM、Thumb和Thumb-2指令集ARM Cortex-M Series——低成本应用Embedded processors optimized for cost sensitive applicationsSupports the Thumb-2 instruction set only不带MMU,不加载或者加载简单嵌入式操作系统不带MMU,运行Vxworks等实时操作系统>安全系列SecurCore系列SecurCore系列微处理器专为安全需要而设计具有ARM体系结构的低功耗、高性能的特点;提供了完善的32位RISC技术的安全解决方案;SecurCore系列微处理器在系统安全方面的特点带有灵活的保护单元,以确保操作系统和应用数据的安全;采用软处理器内核技术(处理器布局随机化),防止外部对其进行扫描探测;可集成用户自己的安全特性和其他协处理器;3、ARM处理器的工作模式及模式转换,ARM处理器的工作状态及状态转换。
>ARM微处理器支持7种工作模式:User用户、System系统、IRQ外部中断、FIQ快速中断、Supervisor管理、Abort中止、Undefined未定义(详见附录)>ARM处理器工作模式的转换:1、通过软件改变(系统调用);2、通过外部中断或异常处理改变(外部中断-IRQ、FIQ,异常处理-来自CPU内部)>ARM微处理器有两种工作状态:ARM状态、Thumb状态(详见附录)>ARM微处理器工作状态转换:在程序执行过程中,可以随时两种工作状态间切换。
4、ARM处理器的异常类型及异常响应和返回过程。
>异常响应:当出现异常后,1 将CPSR复制到相应的SPSR中2 对CPSR进行设置根据异常类型,强制设置CPSR的工作模式位设置中断禁止位,以禁止中断发生如果处理器处于Thumb状态,则切换到ARM状态3 将下一条指令的地址存入相应链接寄存器LRLR中保存的是下一条指令的地址(当前执行指令地址+4或+8,与异常类型有关)4 强制PC从相关的异常向量地址取下一条指令执行,从而跳转到相应的异常处理程序处>异常返回:异常响应处理完毕,处理器将从异常返回:1、将SPSR复制回CPSR;2、将链寄存器LR的值减去相应的偏移量后送到PC中。
另外,复位异常处理程序不需要返回。
5、ARM处理器的寄存器组织的用途。
>ARM处理器的寄存器:37个32位寄存器(31个通用寄存器,6个状态寄存器);这些寄存器不能被同时访问,取决于处理器的工作状态、工作模式。