步进电机的主要特性
一文搞懂步进电机特性原理及驱动器设计
一文搞懂步进电机特性原理及驱动器设计1、步进电机的概念步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
2、步进电机的特点步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
优缺点如下所示。
优点:1. 电机操作易于通过脉冲信号输入到电机进行控制;2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);3. 由于没有接触电刷而实现了更大的可靠性。
缺点:1. 需要脉冲信号输出电路;2. 当控制不适当的时候,可能会出现同步丢失;3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
步进电机有哪些特点

步进电机有哪些特点(1)步进电机没有积累误差:一般步进电机的精度为实际步距角的百分之三到五,且不累积。
(2)步进电机在工作时,脉冲信号按一定顺序轮流加到各相绕组上(由驱动器内的环形分配器控制绕组通断电的方式)。
(3)即使是同一台步进电机,在使用不同驱动方案时,其矩频特性也相差很大。
(4)步进电机与其它电动机不同,其标称额定电压和额定电流只是参考值;又因为步进电机是以脉冲方式供电,电源电压是其最高电压,而不是平均电压,所以,步进电机可以超出其额定值范围工作。
但选择时不应偏离额定值太远。
(5)步进电机外表允许的最高温度:步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
(6)步进电机的力矩会随转速的升高而下降:当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
(7)步进电机低速时可以正常运转,但若高于一定频率就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机到达高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
(8)四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。
串联接法一般在电机转速较低的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
步进电机

原理:步进电机是利用电磁铁原理,将脉冲信号
转换成线位移或角位移的电机。每来一个 电脉冲,电机转动一个角度,带动机械移 动一小段距离。 特点:(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。
(3)改变脉冲顺序,改变方向。
优点
(1)直接实现数字控制;
(2)控制性能好; (3)无接触式; (4)抗干扰能力强; (5)误差不长期积累;
1.3.3 单步运行特性
1.单步运行时的矩角特性和稳定区 以三相单三步运行方式为例,设电机空载时,A相通电 时的矩角特性如图4中的曲线A所示,转子处于稳定平衡点 OA。如加一脉冲,A相断电,B相通电,则矩角特性变为曲 线B。 M
A
A
B
B
OB OA
A
B
θ
b
θ定区
步进电动机的步距角θ b由转子齿数、定子相数和通电 方式所决定,即
360 b mCZ k
式中m为相数。C为状态系数,采用单、双拍通电方式时 C=2,采用单拍或双拍通电方式时C=1。ZK为转子齿数。
若步进电动机所加的通电脉冲频率为f,则其转速为
60 f n mCZ k
1.3 静态运行特性
步进电动机不改变通电状态下的运行特性称
M B M max sin(e 120)
MB 与MA 相距120°电度角。这是一条与A相特性完全相同, 但相位上相差120°(电度角)的特性。当A、B同时通电时,合 成矩角特性应为二者之叠加,即
M AB M A M B M max sin(e 60)
可见MAB是一条幅值与单相通电时相同,相移60°电度角(θt/6) 的正弦曲线,如图3中曲线MAB所示。
1.3.4 连续运行特性
步进电机的参数及特性解读
1.步距误差
是指空载时实测的步距角与理论的步距角之差。
它反映了步进电动机角位移的精度。
国产步进电动机的步距误差一般在±10′~±30′范围内,精度较高的步进电动机可达±2′~±5′。
2.最大静转矩
是指步进电动机在某相始终通电而处于静止不动状态时,所能承受的最大外加转矩,亦即所能输出的最大电磁转矩。
它反映了步进电动机的制动能力和低速步进运行时的负载能力。
3.启动矩频特性
是指步进电动机在有外加负载转矩时,不失步地正常启动所能接受的最大阶跃输入脉冲频率(又称启动频率)与负载转矩的对应关系。
4.启动惯频特性
是指步进电动机带动纯惯性负载启动时,启动频率与转动惯量之间的关系。
5.运行矩频特性
是指步进电动机运行时,输出转矩与输入脉冲频率的关系。
选用步进电动机时,应使实际应用的运行频率与负载转矩所对应的运行工作点位于运行矩频特性之下,才能保证步进电动机不失步地正常运行。
6.步进运行和低频振荡
当输入脉冲频率很低时,脉冲周期如大于步进电动机的过渡过程时间,步进电动机就会处于一步一停的运行状态,这种运行状态称为步进运行。
步进电动机都有一较低的固有频率,当步进运行频率或低速运行频率与该固有频率相等或接近时,就会产生共振,使步进电动机振荡不前,这种现象称为低频振荡。
避免低频振荡的现象发生采用的方法:
一种是使运行频率避开固有频率,二是前一方法不允许时,可通过调节步进电动机上的阻尼器来改变固有频率。
7.最大相电压和最大相电流
分别是指步进电动机每相绕组所允许施加的最大电源电压和流过的最大电流。
步进电机的基本特性-静态、动态、暂态转矩特性
步进电机的基本特性:静态、动态、暂态转矩特性步进电机的基本特性包括电机静态特性、连续运动特性(动态特性)、电机启动特性和电机制动特性(暂态特性)。
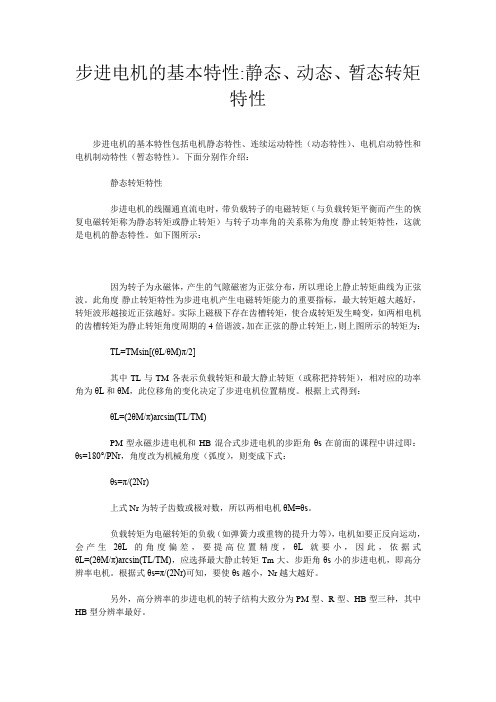
下面分别作介绍:静态转矩特性步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。
如下图所示:因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。
此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,最大转矩越大越好,转矩波形越接近正弦越好。
实际上磁极下存在齿槽转矩,使合成转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:TL=TMsin[(θL/θM)π/2]其中TL与TM各表示负载转矩和最大静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。
根据上式得到:θL=(2θM/π)arcsin(TL/TM)PM型永磁步进电机和HB混合式步进电机的步距角θs在前面的课程中讲过即:θs=180°/PNr,角度改为机械角度(弧度),则变成下式:θs=π/(2Nr)上式Nr为转子齿数或极对数,所以两相电机θM=θs。
负载转矩为电磁转矩的负载(如弹簧力或重物的提升力等),电机如要正反向运动,会产生2θL的角度偏差,要提高位置精度,θL就要小,因此,依据式θL=(2θM/π)arcsin(TL/TM),应选择最大静止转矩Tm大、步距角θs小的步进电机,即高分辨率电机。
根据式θs=π/(2Nr)可知,要使θs越小,Nr越大越好。
另外,高分辨率的步进电机的转子结构大致分为PM型、R型、HB型三种,其中HB型分辨率最好。
由于PM型定子磁极为爪级结构的关系,定子磁极数的增加受到机械加工的限制。
HB型转子表面无齿,N极与S极在转子表面交替磁化,因此极数即为极对数Nr,同样的,转子磁极Nr的增加也受到充磁机械的限制。
3.2步进电动机的运行特性与使用(精)

3:单步运行特性
单步运行:加一个控制脉冲改变一次通电状态,这个工作状态 称为单步运行。
运行区域:包括静稳定区和动稳定区(见P102 图3.18) 单步运行特性:转子空间转角随时间做减幅振荡衰减运动(见 P103 图3.19)
4:连续脉冲运行特性
(1)极低频条件下运行 T>tb 控制脉冲周期T大于转子单步运行振荡衰减时间tb,当第二个 脉冲到来之前,第一个脉冲使得转子运行已经结束。电机处 于欠阻尼状态,产生振荡,不会失步和越步。见图3.20
(3)脉冲频率f>4f0条件下运行
转子的运行特点:在第一个脉冲作用下,转子产生的振荡还 没达到最大振幅,第二个脉冲已经到来,改变通电状态。见 图3.22。电机往往会超出稳定区而失步。
5:脉冲信号的频率对电机运行的影响
当脉冲信号频率很低时,控制脉冲以 矩形波输入,电流波形比较接近于理 想的矩形波; 随着脉冲信号频率增高,由于电动机 绕组中的电感有阻止电流变化的作用, 因此电流波形发生畸变,频率越高, 畸变越严重。如图所示, 如果脉冲频率过高,电流还来不及 上升到稳定值I 就开始下降,于是, 电流的幅值降低(由I下降到I’),因而 产生的转矩减小,致使带负载的能力 下降。故频率过高会使步进电动机启 动不了或运行时失步而停下。因此, 对脉冲信号频率是有限制的。
2:使用步进电动机时应注意的几个问题 (1)驱动电源的优劣对步进电动机控制系统的运行影响极大, 使用时要特别注意,需根据运行要求,尽量采用先进的驱动电 源,以满足步进电动机的运行性能。 (2)若所带负载转动惯量较大,则应在低频下启动,然后再 上升到工作频率,停车时也应从工作频率下降到适当频率再停 车。 (3)在工作过程中,应尽量避免由于负载突变而引起误差。 (4)若在工作中发生失步现象,首先,应检查负载是否过大, 电源电压是否正常,再检查驱动电源输出波形是否正常,在处 理问题时不应随意变换组件。
步进电机培训教材

步进电动机简介一、步进电动机概述1.1步进电机特点步进电动机(stepping motor)也称脉冲电动机、脉动电动机、分级电动机;更老一些叫法也叫阶动电动机。
这种电动机以规定的次序对定子线圈励磁,每次只转动一定的角度。
这种电动机主要特点如下:(1)控制电路步进电动机的驱动控制电路是将脉冲分配到各相线圈中去的逻辑分配电路,或者是对线圈提供励磁的驱动开关电路。
这种电路同其他伺服控制电路相比较是很简单。
(2)对数控机器的适应性步进电动机很容易同应用微机的设备组合起来,优点是对旋转角度、速度、正反转;启动停止等动作的控制准确、迅速。
(3)定位控制直流电动机等伺服电动机进行定位控制时,使转子保持在某一角度,一定要不间断通电,以达到制动作用。
而步进电机只要维持励磁就能得到保持转矩。
永磁型、混合型步进电动机即使切断励磁也能得到定位转矩;因此,用步进电动机实现准确的定位控制既简单、成本又低。
(4)步距角误差步进电动机的角度误差通常是基本步距角的5%左右,因此输入脉冲没有积累误差,所以定位精度很高。
(5)低转速、高转矩步进电动机与其他类似电动机比较,是属于低速、高转矩电动机。
其他伺服电动机的工作转速在1000rpm以上,而以每秒1000个脉冲的速度来驱动1.8°的步进电动机时转速只有300rpm,以它是属于低转速、高转矩的电动机。
(6)速度可变控制步进电机的旋转角度同输入脉冲成正比,旋转速度同输入的脉冲(频率)成正比,只要简单的改变脉冲速率,就能达到大幅度控制速度变化的目的。
(7)可靠性高步进电机除了轴承以外没有电刷、换向器等磨损部分,无须特殊的维修保养是可靠性高寿命长的电动机。
(8)稳定性差步进电动机的驱动转矩随着转子旋转的位置而变化,而每次励磁都会引起转矩的波动,所以速率的波动比较大。
另外电动机的转矩和惯量决定着电动机固有的频率和驱动脉冲速率,同步进电动机安装的固有的振动之间引起共振,而产生共振噪音,这是一大缺点。
步进电动机的特性步进伺服
步进电动机的特性 - 步进伺服1、步进电机的基本特点反应式步进电动机转速只取决于脉冲频率、转子齿数和拍数,而与电压、负载、温度等因素无关。
步进电动机工作时的步数或转速既不受电压波动和负载变化的影响(在允许的负载范围内),也不受环境条件(温度、压力、冲击、和振动等)变化的影响,只与把握脉冲同步,同时,它又能依据把握的要求进行启动、停止、反转或转变速度,这就是它被广泛的应用于各种数字把握系统中的缘由。
2、距角特性距角特性是反映步进电动机电磁转矩T随偏转角变化的关系。
这一特性反映了比较电动机带负载的力量,它是电动机的最主要的性能指标之一。
步进电机的运行性能3、静特性所谓静态是指步进电动机不转变通电状态,转子不动时的状态。
步进电动机的静态特性主要指静态矩角特性和最大静转矩特性.。
1.静态矩角特性描述步进电动机静态时电磁转矩T与失调角之间关系的特性曲线称为矩角特性。
步进电动机矩角特性步进电动机最大静转矩特性2.最大静态转矩矩角特性上电磁转矩的最大值称为最大静态转矩。
它与通电状态及绕组内电流的值有关。
在肯定通电状态下,最大静转矩与绕组内电流的关系,称为最大静转矩特性。
当把握电流很小时,最大静转矩与电流的平方成正比地增大,当电流稍大时,受磁路饱和的影响,最大转矩Tmax上升变缓,电流很大时,曲线趋向饱和。
3、动特性步进电动机运行时总是在电气和机械过渡过程中进行的,因此对它的动特性有很高的要求,步进电动机的动特性将直接影响到系统的快速响应以及工作的牢靠性。
它不仅与电动机的性能和负载性质有关,还和电源的特性及通电的方式有关,其中有些因素还是属于非线性的,要进行精确的分析较为困难,通常只能接受近似的方法来争辩。
1.步进运行状态时的动特性开头时,步进电动机的矩角特性为曲线①所示,若电动机空载,则转子稳定在Ol点处。
加一个脉冲,通电状态转变,矩角特性曲线变成曲线②,转子将稳定在新的稳定点O2。
若电动机带负载,先假设负载转矩为T1,则在初始状态时电动机的稳定位置是曲线①上的01'点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机的主要特性
1)步距角α
每给一个脉冲信号,电机转子转过角度的理论值。
其中,m为定子相数;z为转子齿数;k为通电系数,m相m拍,k=1;m相2m拍,k=2。
α一般很小,如:3°/1.5°,1.5°/0.75°,0.72°/0.36°等
2)矩角特性、最大静态转矩Mjmax和启动转矩Mq
静态:步进电机处于通电状态,转子处在不动状态。
静态转矩Mj:在电机轴上施加一个负载转矩M,转子会在载荷方向上转过一个角度θ(失调角),转子因而受到一个电磁转矩Mj的作用与负载平衡。
矩角特性:步进电机单相通电的静态转矩Mj随失调角θ的变化曲线。
3)启动频率fq和启动时的惯频特性
启动频率或突跳频率fq:空载时,步进电机由静止突然启动并进入不丢步的正常运行状态所允许的最高频率。
高于启动频率,将不能正常起动。
启动时的惯频特性:是指电机带动纯惯性负载时启动频率和负载转动惯量之间的关系。
步进电机在带负载(尤其是惯性负载)下的启动频率比空载要低。
4)运行矩频特性
连续运行频率:步进电机启动后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率。
其值远大于启动频率。
运行矩频特性:是描述步进电机在连续运行时,输出转矩与连续运行频率之间的关系。