汽车稳定性控制系统模型及横摆控制仿真
车辆横向稳定性的模糊控制仿真
摘
要 : 辆 横 向稳 定 性 一 般 是 由车 辆 的结 构 来 保 证 的 , 车 辆 在 较 大 侧 向力 作 用 下 将 丧 失 横 向 稳 定 性 、 车 但 通
过 建 立车 辆 转 向 运 动 的 简 化 模 型 , 用 前 馈 补 偿 和 模 糊 控 制 策 略 , 前 轮 转 向 角 视 为 前 馈 输 入 变 量 来 补 偿 转 利 将
Vo14 NO、2 .
J n 2 0 u 、0 7
文章 编号 :6 2 9 3 ( 0 7 0 —0 4 ~ 0 1 7 — 3 1 2 0 )2 0 9 5
车 辆 横 向稳 定 性 的模 糊 控 制仿 真
吴义 虎 ,宋 丹 丹 ,侯 志祥 ,袁 翔
( 沙理工大学 汽车与机械工程学 院, 南 长沙 长 湖 40 7) 1 0 6
பைடு நூலகம்
W U — Yihu,SON G n da Da - n,H OU Zhixing,YU AN a g — a Xi n
( l g fAu o b l n e h nc lEn i e rn Ch n s a Un v r i f Co l e o t mo i a d M c a ia g n e i g, a g h i e st o e e y
向角 引起 的车 辆 侧 偏角 变 化 ; 过 左 右 车 轮 制 动 力 差 产 生 附 加 力 矩 来 控 制 车 辆 的 横 摆 运 动 , 通 同时 以 车 辆 横 摆 角速 度 为 反 馈 输 入 变量 来 校 正 消 除 系统 误 差 , 计 了 车 辆 模 糊 控 制 器 , 对 控 制 系 统 在 不 同 车 速 下 进 行 了 仿 设 并 真 分 析、 真 结 果 表 明 , 加 控 制 的 车 辆 与无 控 制 的 相 比 , 摆 角 速 度 与 侧 偏 角 的 输 出稳 态 值 减小 , 凋量 降 仿 施 横 超
提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性

提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性摘要:车辆稳定性控制系统是一种主动的安全系统,为防止事故发生并利用微分制动器产生人工横摆力矩稳定车辆的机动而设计。
在本文中,为了提高车辆的操纵性,横向稳定性,和侧倾稳定性,每个参考横摆角速度的设计和组合到目标横摆角速度都取决于驾驶情况。
偏航角速度控制器的设计以及跟踪目标横摆角速度都是基于滑模控制理论。
横摆角速度控制器所需的总的横摆力矩以及每个制动器压力的合理分布,都由有效控制车轮决定。
估计算法是一种可以识别出滚动角和车身侧滑角的简化动力学模型和参数自适应的方法。
本文中所提出的车辆稳定性控制系统和估计算法的性能与仿真结果可以验证实验结果。
关键词:车辆稳定性控制系统,目标横摆角速度,角速度控制器,制动力分配,滚动角估计,车身侧滑角估计1.介绍有一个日益需求的主动安全系统,通过人工干预的方法以防止或减少事故的发生(You et al .,2006)。
这个系统超出仅仅最小化损失事故的被动安全概念,它的必要性日益被市场所公认。
因此, 近年来进行了不同的地面上车辆主动安全系统的研究。
尽管有其他替代技术保护车辆的稳定性,例如4 ws(四轮引导),AFS(主动前轮引导),后轮转向,和微分牵引(Song et al .,2007),最近的主流车辆安全系统是集中在制动差动和制动干预。
这主要是从硬件现有的可靠性和成本效率出发考虑得出的结果。
现有的技术成果有ABS(防抱死制动系统)和TCS(牵引力控制系统)以及在制动/加速度时持有车轮滑转线性滑动。
在这里假设车辆配备了差动制动系统,因此, 本文提出了车辆稳定控制系统主要研究通过生成与控制车辆的横摆力矩差动制动在四个车轮。
本文使用的横摆角速度是一个控制变量。
由于车辆的车身侧偏角可以使横摆角速度稳定控制在一个适当的参考横摆角速度,使车身侧滑角动力转变成稳定的内部动力(You et al .,2006)。
同样,翻车的风险可以通过稳定辊动力学和控制横摆率减轻。
商用车横向稳定性优化控制联合仿真分析
工
程
学
报
VO1 . 5 3
J a n.
NO. 2
20l 7
J OURNAL 0F ME CHANI CAL E NGI NEE RI NG
Do I :1 0 . 3 9 0 1 / J M E. 2 0 1 7 . O 2 . 1 1 5
工况进行车辆横 向稳 定性仿真分析 。研究结果表 明,与传统 的电子稳定控制系统( E l e c t r o n i c s t a b i l i t y c o n t r o l , E S C ) 控制策略相
比较 ,优化控制后 车辆的横摆角速度 、质心侧偏角 以及 侧向加速 度等动态响应指标均满足控制要求 ,并且实 际行驶轨迹与 目
Ab s t r a c t :A c o mme r c i a l v e h i c l e l a t e r a l s t a b i l i y t o p t i mi z a t i o n c o n t r o l s t r a t e g y b a s e d o n p a r t i c l e S Wa l T I 1 o p t i mi z a t i o n a n d n e u r a l n e t wo r k o p t i mi z a t i o n a l g o it r h m i s p r o p o s e d , a n d u p p e r nd a l o we r d o u b l e c o n r t o l mo d e i s d e s i g n e d , y a w r a t e v e l o c i y t nd a v e h i c l e s i d e
基于单轮差动制动的汽车横向稳定性控制研究及仿真分析
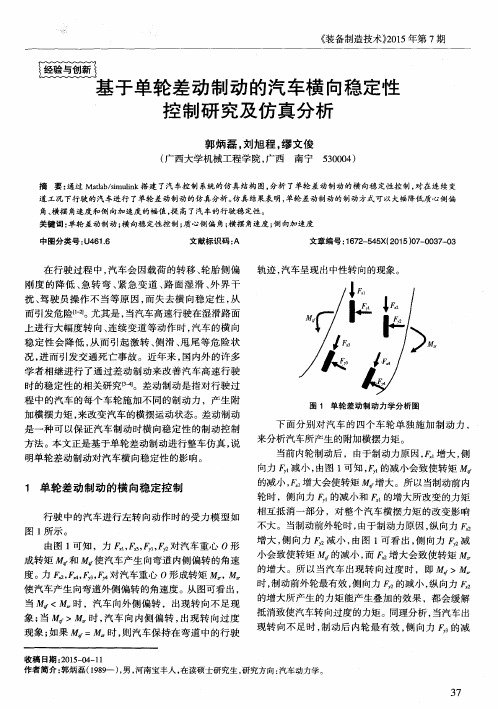
1 单轮 差动 制动的横 向稳定控 制
行 驶 中 的汽 车 进行 左 转 向动 作 时 减小 , 增大会使转矩 % 增大。所以当制动前内 轮时 ,侧 向力 。 的减小和 的增大所改变 的力矩
相互 抵 消 一部 分 ,对整 个 汽 车横 摆 力矩 的改 变影 响
抵 消 致使 汽 车转 向过 度 的力矩 。同理分 析 , 当汽 车 出 象; 当 > 时, 汽 车向 内侧偏转 , 出现 转 向过度 现转 向不 足时 , 制动后 内轮最有效 , 侧向力 的减 现象 ; 如 果 = 时, 则 汽 车 保 持 在 弯道 中 的行 驶
收稿 日期 : 2 0 1 5 — 0 4 — 1 1 作者简介 : 郭炳磊 ( 1 9 8 9 一) , 男, 河南宝丰人 , 在读硕士研究生 , 研究方 向 : 汽车动力学 。 3 7
Eq u i p me n t Ma n u f a c t u r i n g T e c h n o l o g y N o . 7, 2 0 1 5
小, 纵 向力 的增 大所产生的力矩都会缓解抵消致 使汽车转向不足的力矩 。
矩 的效 果如 图 2所 示[ 5 1 。
扰、 驾驶员 操作不 当等原 因 , 而失去横 向稳定 性 , 从
而 引发 危 险【 。尤 其是 , 当汽 车 高速 行驶 在 湿滑 路 面 上 进 行 大 幅度 转 向 、 连续 变 道 等 动 作 时 , 汽 车 的 横 向
稳定 性会降低 , 从而引起激转 、 侧滑 、 甩尾等危 险状
不大 。当制动前外轮时 , 由于制动力原因 , 纵 向力 增大 , 侧 向力 减小 , 由图 1 可看 出, 侧 向力 减 小会致使转矩 的减小 , 而 增大会致使转矩
基于模糊PID控制的汽车横向稳定性控制研究与仿真的开题报告
基于模糊PID控制的汽车横向稳定性控制研究与仿真的开题报告【摘要】随着汽车工业的不断发展,汽车已经成为了人们日常生活中不可或缺的交通工具,但随之而来的问题是汽车横向稳定性不足,容易导致交通事故。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决这一问题。
在该方法中,采用了模糊控制和PID控制相结合的方式,通过对车辆侧向加速度进行控制,以提高车辆的横向稳定性。
本文通过建立汽车的横向稳定性控制模型,采用MATLAB/Simulink 进行了仿真实验。
仿真结果表明,该控制方法可以有效地提高汽车的横向稳定性,减少车辆侧翻和失控的风险,从而保障行车安全。
【关键词】模糊PID控制,汽车横向稳定性,MATLAB/Simulink,仿真实验【研究背景与意义】汽车交通事故在日常生活中屡见不鲜,其中很大一部分都是由于车辆失控或侧翻导致的。
因此,提高汽车的横向稳定性是保障行车安全的重要措施之一。
目前,汽车横向稳定性控制方法主要包括传统的PID(比例、积分、微分)控制和模糊控制等。
但传统PID控制方法存在参数调节难的问题,而单纯采用模糊控制方法不能兼顾控制精度和实时性。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决传统PID控制和模糊控制方法的问题。
【研究内容与方法】本文首先建立了汽车横向稳定性控制模型,然后采用模糊PID控制方法进行控制。
具体来说,该方法以车辆侧向加速度作为控制量,通过PID控制和模糊控制相结合的方式进行控制。
PID控制用于输出控制量,模糊控制用于调节控制量的参数,从而实现对车辆横向稳定性的控制。
本文采用MATLAB/Simulink进行了仿真实验。
在仿真中,模拟了汽车在各种道路条件下的运行情况,并对控制方法进行了比较。
通过对仿真结果的分析,评价了控制方法的效果。
【预期结果】预计通过本文的研究,可以提出一种基于模糊PID控制的汽车横向稳定性控制方法,并通过仿真实验验证该方法的可行性和有效性。
汽车稳定性横摆力矩控制仿真研究
() 2
() a
+。 )6 + 一) + +) (一 s- ( 譬( ‘ i n
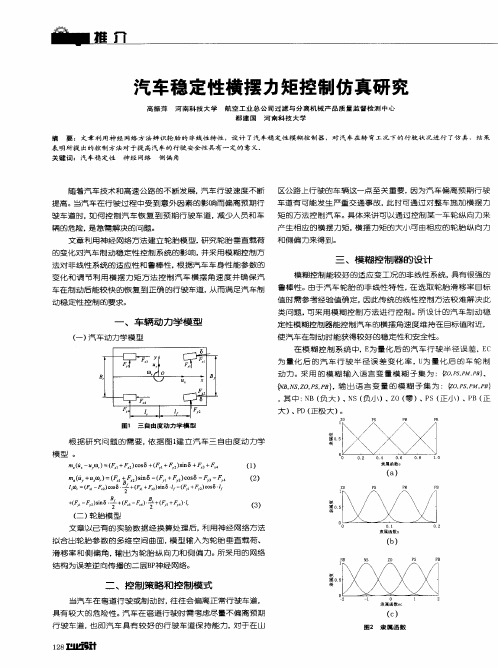
( ) 胎 模 型 二 轮
( 3 )
唾 05
描
文 章 以 已有 的 实 验 数 据 经 换 算处 理 后 , 用神 经 网络 方 法 利
噻 0 槲
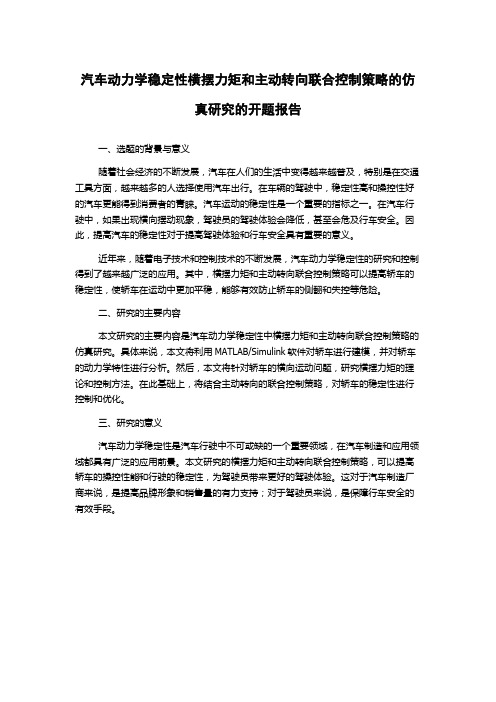
隶属函数e c
() c
图2 隶属 函数
18 ' ̄ f 2 TiWi '
,
其 中 : B( 大 ) N 负 小 ) Z 零 )、 S( N 负 、 S( 、 0( P T小 ) P 正 I 、 B(
大 ) P 正极 大 ) 、 D( 。
图 1 三 自 由度 动 力 学 模 型
根 据 研 究 问 题 的 需 要 , 据 图 l 立 汽 车三 自 由度 动 力 学 依 建
法 对 非 线 性 系 统 的 适 应 性和 鲁棒 性 , 据 汽 车 车 身 性 能参 数 的 根
三 、模 糊 控 制 器 的设 计
模 糊 控 制 能 较 好 的适 应 变 工 况 的非 线 性 系统 , 有很 强 的 具
变化 和 调 节 利 用 横 摆 力矩 方 法 控 制 汽 车 横 摆 角 速 度 并 确 保 汽
拟 合 出 轮 胎 参 数 的多 维 空 间 曲面 , 型 输 入 为轮 胎 垂 直 载 荷 、 模
隶属函数
() b
滑 移 率 和 侧 偏 角 , 出 为轮 胎 纵 向力 和 侧 偏 力 。所 采 用 的 网 络 输 结 构 为 误 差 逆 向传 播 的 二层 B 神 经 网 络。 P
神 经 网络 法对 于提 高 汽 车 的行 驶 安 全 性 具有 一 定 的 意 义 关键 词 : 汽 车稳 定性
汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿真研究的开题报告
汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿
真研究的开题报告
一、选题的背景与意义
随着社会经济的不断发展,汽车在人们的生活中变得越来越普及,特别是在交通工具方面,越来越多的人选择使用汽车出行。
在车辆的驾驶中,稳定性高和操控性好的汽车更能得到消费者的青睐。
汽车运动的稳定性是一个重要的指标之一。
在汽车行驶中,如果出现横向摆动现象,驾驶员的驾驶体验会降低,甚至会危及行车安全。
因此,提高汽车的稳定性对于提高驾驶体验和行车安全具有重要的意义。
近年来,随着电子技术和控制技术的不断发展,汽车动力学稳定性的研究和控制得到了越来越广泛的应用。
其中,横摆力矩和主动转向联合控制策略可以提高轿车的稳定性,使轿车在运动中更加平稳,能够有效防止轿车的侧翻和失控等危险。
二、研究的主要内容
本文研究的主要内容是汽车动力学稳定性中横摆力矩和主动转向联合控制策略的仿真研究。
具体来说,本文将利用MATLAB/Simulink软件对轿车进行建模,并对轿车的动力学特性进行分析。
然后,本文将针对轿车的横向运动问题,研究横摆力矩的理论和控制方法。
在此基础上,将结合主动转向的联合控制策略,对轿车的稳定性进行控制和优化。
三、研究的意义
汽车动力学稳定性是汽车行驶中不可或缺的一个重要领域,在汽车制造和应用领域都具有广泛的应用前景。
本文研究的横摆力矩和主动转向联合控制策略,可以提高轿车的操控性能和行驶的稳定性,为驾驶员带来更好的驾驶体验。
这对于汽车制造厂商来说,是提高品牌形象和销售量的有力支持;对于驾驶员来说,是保障行车安全的有效手段。
基于联合仿真的汽车横摆稳定性控制系统研究
基于联合仿真的汽车横摆稳定性控制系统研究康南; 周鹏【期刊名称】《《湖州职业技术学院学报》》【年(卷),期】2019(017)002【总页数】5页(P73-76,81)【关键词】汽车横摆稳定性控制系统; 操纵稳定性; 联合仿真; CarSimsimulink【作者】康南; 周鹏【作者单位】湖州职业技术学院机电与汽车工程学院浙江湖州 313000; 昆明冶金高等专科学校机械工程学院昆明 650033【正文语种】中文【中图分类】U463.53随着中国汽车工业的飞速发展和汽车保有量的急剧增加,汽车的安全性和操纵稳定性受到越来越多的科研人员的重视和深入研究[1]95-107。
如吴刚院、刘丹等设计了汽车横摆稳定性控制系统,并通过联合仿真的形式,验证其有效性和可靠性[2]30-35;杨秀建、王增彩等设计了主动转向和横摆稳定性集成控制系统[3]1-10;王其东、刘伟等采用滑模控制的方法,设计了汽车稳定控制系统[4]82-90,等等。
近年来,科研人员更加关注汽车横摆稳定性控制系统的开发。
汽车在进行超车换道、紧急避障和弯道转向等操作时,若轮胎力进入了非线性区,常会发生侧滑和甩尾等驾驶员难以控制的横摆失稳现象[5]300-308。
针对汽车的操纵稳定性和安全性问题,国内外专家学者从理论分析、模型仿真或场地试验等多个方面进行了广泛且深入的研究,分析了影响汽车横摆失稳的诸多因素,并设计了横摆稳定控制系统来改善汽车行驶的稳定性和安全性[6]723-732 [7]141-148。
与欧美和日本等汽车技术发达的国家相比,我国在汽车操纵稳定性方面的研究起步较晚,积累的成果较少,开发高性能的汽车横摆稳定性控制系统比较困难,装车率也较低[1]95-107。
本文主要研究汽车横摆稳定性控制问题,采用基于差动制动的控制方式来提高汽车的横摆稳定性,在CarSim中建立整车仿真模型,在Simulink中设计控制策略并搭建仿真模型,探讨CarSim与Simulink的联合仿真问题,并通过联合仿真的形式对本文设计的控制策略进行验证分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所制 定 的控 制 策略 可 以有效地 实现横摆 稳 定性 控 制 , 而且 减 小 了侧 向加 速度 , 使 汽 车具 有 一 定
的抗侧 翻 能 力 , 提 高 了汽车 的稳 定性和 安 全性 。 关 键 词: 电子稳 定控 制 ; 模 糊控 制 ; 直接 横摆 ; 侧 倾
Ve hi c l e S t a b i l i t y Co n t r o l S y s t e m
ou J i a n,Z HO U Xi n — h u a ,Z HA NG Yo n g ,DEN G G u o — h o n g
( C h o n g q i n g A u t o mo b i l e I n s t i t u t e , C h o n g q i n g U n i v e r s i t y o f T e c h n o l o g y ,C h o n g q i n g 4 0 0 0 5 4 ,C h i n a )
2 0 1 3年 2月
F e b .2 0 1 3
d o i :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 4 — 8 4 2 5 ( z ) . 2 0 1 3 . 0 2 . 0 0 1
汽 车 稳定 性 控 制 系统 模 型 及 横 摆 控 制仿 真
欧 健, 周 鑫华 , 张 勇 , 邓 国红
中图分 类号 : U 4 1 6 . 6
文 献标 识码 : A
文 章编 号 : 1 6 7 4— 8 4 2 5 ( 2 0 1 3 ) 0 2—0 0 0 1— 0 5
Mo d e l i n g a n d S i mu l a t i o n o f Ya w Co n t r o l l i n g f o r
第2 7卷 第 2期
Vo l _ 2 7 No. 2
重 庆 理 工 大 学 学 报( 自然科学)
J o u r n a l o f C h o n g q i n g U n i v e r s i t y o f T e c h n o l o g y ( N a t u r a l S c i e n c e )
s a f e t y o f t h e v e hi c l e a r e e n h a n c e d. Ke y wo r ds:e l e c t r o ni c s t a b i l i t y c o n t r o l ;f u z z y c o n t r o l ;d i r e c t y a w ;r o l l
Abs t r a c t :Th e v e h i c l e r e f e r e n c e mo d e l ,a n d a 8- DOFs v e hi c l e d y n a mi c s mo d e l c o v e in r g y a w a n d r o l l mo t i o n a r e e s t a b l i s he d i n Ma t l a b / Si mu l i n k.Us i n g t h e me t h o d o f d i f f e r e n t s t a t e s o f y a w a n g l e,a d i r e c t
y a w c o n t r o l s t r a t e y g h a s b e e n p r o p o s e d b a s e d o n f u z z y c o n t r o l p in r c i p l e ,t h e n t h e s t a b i l i t y c o n t r o l o f t h e v e h i c l e E S C s y s t e m i s a c h i e v e d .T h e r e s u l t s o f i f s h h o o k t e s t s i mu l a t i o n s i n c h a r a c t e i r s t i c c y c l e s s h o w t h a t t h e d e s i g n e d c o n t r o l s t r a t e y g c a n e f f e c t i v e l y i mp l e me n t y a w s t a b i l i t y c o n t r o l a n d r e d u c e s l a t - e r a l a c c e l e r a t i o n .F u r t h e r mo r e ,t h e v e h i c l e’ S a n t i - r o l l o v e r c a p a c i t y i s i n c r e a s e d,a n d t h e s t a b i l i t y a n d
重庆 汽车 学 院 , 重庆 4 0 0 0 5 4 )
( 重 庆理 工大 学
摘
要: 在M a t l a b / S i m u l i n k中建立 了包括横摆运动、 侧倾运动 的八 自由度整车动力学模 型
和车辆参考模型。采用车辆横摆 角速度的状态差异法, 基于模糊控制理论制定 了直接横摆控制