基于RecurDyn和Simulink的电传动车辆转矩控制策略
基于RecurDyn和Simulink的电传动车辆转矩控制策略
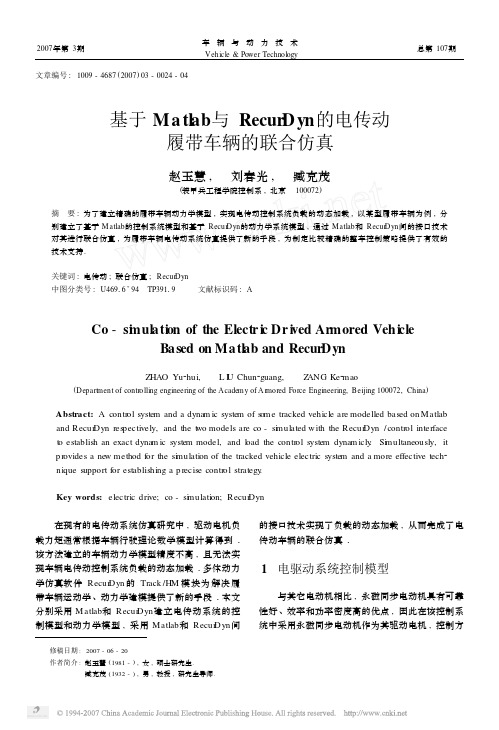
2 履带车辆样机模型构建
性提供给车辆行驶不同的法向力 、牵引力和滚动阻 力 。到目前为止 , 尽管车辆地面力学已经取得了很 大的进展 ,但描述地面与车辆相互关系的参量一般 还是采用公认的地面滚动阻力系数 f 、地面附着系 数 φ及地面转向阻力系数μ。本虚拟样机路面模型 充分利用一般的试验统计数据 , 针对仿真需要 , 在 RecurDyn/ HM 模块中定义了水平硬质地面 ,地面附 着系数 φ为 017 , 转向阻力系数 μ 为 0149 , 滚动阻 力系数 f 为 0105[4 ] 。整车动力学模型及路面模型 如图 2 所示 。
或者转速实现[2 ] 。由于车辆的直线行驶稳定性和 转向行驶性能完全依赖于控制策略的优劣 ,因此 ,准 确与实时的控制策略是车辆良好行驶的前提 。
图 1 电传动履带车辆结构框图 Fig. 1 Configuration of t he electric drive tracked vehicle
213 电动机及其控制系统模型 本文研究重点不是电动机驱动系统 , 从工程应
用的角度考虑 ,利用电动机驱动系统试验数据在控 制软件 Simulink 中建立 Look2Up Table 模块 , 利用 查表功能实现驱动系统的响应过程 , 因电动机转动 惯量与整车惯量相比较小 , 对整车动态性能的影响 可以忽略[5 ] 。仿真模型如图 3 所示 。
立的驱动电动机控制系统模型 ,构建了整车虚拟样机 ;分析和建立了转矩控制策略 ,对驾驶员信号进行了解析 ,利
用 Stateflow 建立了控制逻辑 ;在此虚拟样机基础上利用联合仿真的方法对转矩策略进行了仿真和样机试验 ,验证
了转矩控制策略方法的正确性 。
关键词 : 履带车辆 电传动 控制策略 RecurDyn Matlab/ Simulink
分布式电驱动履带车辆性能仿真研究
195电力电子Power Electronic电子技术与软件工程Electronic Technology & Software Engineering●基金项目:国防科技创新工程项目;项目编号:12050005。
1 引言混合动力电驱动履带车辆由于其采用了发动机-发电机组、动力电池和超级电容供电,具备良好的机动性能、静音行驶能力、灵活的空间布置以及较低的燃油消耗等优势,同时可以为电磁炮、激光武器、电装甲等新型装备的应用提供可靠的用电保障,逐渐成为了未来履带车辆的重要研究发展方向[1-2]。
为满足车辆转向、爬坡以及高速行驶需求,履带车辆双侧独立电驱动方案对驱动电机的功率密度、峰值扭矩和调速范围具有较高的要求[3],为降低驱动电机的设计难度,本文提出了一种新型的分布式电驱动履带车辆结构方案,该方案采用主动轮和负重轮协同驱动车辆行驶。
根据车辆的性能指标对电驱动系统各部件进行了参数匹配,并对匹配结果进行了机电联合仿真校验。
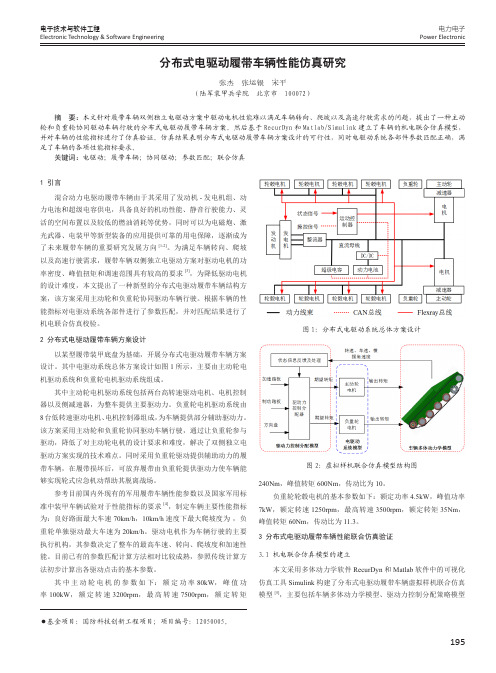
2 分布式电驱动履带车辆方案设计以某型履带装甲底盘为基础,开展分布式电驱动履带车辆方案设计。
其中电驱动系统总体方案设计如图1所示,主要由主动轮电机驱动系统和负重轮电机驱动系统组成。
其中主动轮电机驱动系统包括两台高转速驱动电机、电机控制器以及侧减速器,为整车提供主要驱动力。
负重轮电机驱动系统由8台低转速驱动电机、电机控制器组成,为车辆提供部分辅助驱动力。
该方案采用主动轮和负重轮协同驱动车辆行驶,通过让负重轮参与驱动,降低了对主动轮电机的设计要求和难度,解决了双侧独立电驱动方案实现的技术难点。
同时采用负重轮驱动提供辅助动力的履带车辆,在履带损坏后,可放弃履带由负重轮提供驱动力使车辆能够实现轮式应急机动帮助其脱离战场。
参考目前国内外现有的军用履带车辆性能参数以及国家军用标准中装甲车辆试验对于性能指标的要求[4],制定车辆主要性能指标为:良好路面最大车速70km/h ,10km/h 速度下最大爬坡度为 ,负重轮单独驱动最大车速为20km/h 。
基于RecurDyn与Simulink的控制仿真平台在滚筒药柜上的应用

图 2 电气原理 图 1 . 2 滚 筒 药 柜 仿 真 平 台原 理
建立滚筒药柜仿真平台, 应首先建立三维模型 , 其 次加 入控
制模块 , 建立数学模型 , 进 而 对 整 合 的 系 统进 行 仿 真 和 调 试 。
首先通 过 R e c u r Dy n软 件 建 立 系 统 传 动 部 分 的 三 维 模 型 , 建立原件 、 约束 、 驱动 等 。然后通 过 R e c u r Dy n软件 自带 的控制 移 动 。 利 用 上 下 传 动 轴 承 载 药 品和 储 药 斗 的 重 量 , 轴 的两 端 安 设 定控制 的输入信号 , 以及 需 要 输 出 的 系 统 信 号 , 进而输 装有链 轮等传 动机构 , 带动储 药斗A T L A B软件调 用 的 M 文件 。在 MAT L A B 是 一根 通 轴 , 一端与传动链 轮、 电 动机 的 减 速 箱 连 接 。 动 力 驱 动 软件 中, 首先读 取 R e c u r D y n输 出的 M 文件 , 进 而输 出传 动 系 机构 由电动机 、 减速器 、 两级减速 的链 轮链条等 组成 。 平衡 杆及 统的R e c u r Dy n P l a n t B l o c k模块 , 然后 在此模块基 础上 , 加入相 平衡 杆导轨用于 保持储药斗 的水平及 平行状态 。 传动链 导轨用 应 的模块构 建控制系统 。最 后在 S i mu l i n k中运行 , 通过输 出的 于传 动链 的导 向, 保 证 传 动 链 条 的平 稳 运 行 以及 降 低 噪 声 。 张 各种数据 , 检验控制系 统的可靠性 。 紧 装置用于储 药斗传动 链条 的张紧 。此外 还有机架 、 底座 与壳
15-基于Matlab_Simulink的直接转矩控制系统仿真研究
(7)
3.2.2 磁链与转矩滞环调节模块
磁链允许容差通过定义施密特触发器的上下触 发点来设置,输出 sf (0 或 1)即磁链滞环调节器的输 出状态量。图 4 所示为定子磁链滞环调节模块。
如图5所示为转矩滞环调节子系统,其中ωr、ωr* 分别为观测所得转速和给定转速参考值,将其 PI 调 节后得到给定转矩和实际转矩。转矩滞环调节的输 出状态量 ST 有两种状态值,分别为 1 和 0,将 PI 调 节得到的给定转矩和实际转矩的差值与容差逻辑比 较,即可得到 ST 的值,在查电压矢量最优开关表时
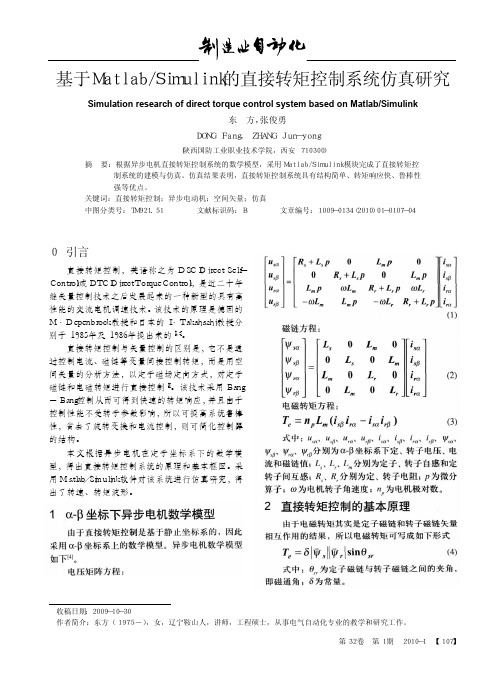
从图 6 圆形磁链轨迹可明显看到电压矢量在
图 7 相电流波 图 8 电磁转矩曲线
图 6 圆形磁链轨迹
图 9 电机转速曲线 【下转第 172 页】
第 32 卷 第 1 期 2010-1 【109】
西门子重磅出击亚洲版 SPS —— SIAF GUANGZHOU
SIAF GUANGZHOU 中国广州国际工业自动 化技术及装备展览会,是全球最大自动化展—— “SPS/IPC/DRIVES 电气自动化展”与华南著名工 控展——“CHIFA 中国(广州)国际工业控制自动 化及仪器仪表展”在中国的完美结合,2010 年 3 月 8~11 日在广州琶洲展馆举办。经过资源整合,展会 将借鉴 SPS 成功办展经验和营销模式投入运行。
直接转矩控制与矢量控制的区别是,它不是通 过控制电流、磁链等变量间接控制转矩,而是用空 间矢量的分析方法,以定子磁场定向方式,对定子 磁链和电磁转矩进行直接控制[3]。该技术采用 Bang - Bang 控制从而可得到快速的转矩响应,并且由于 控制性能不受转子参数影响,所以可提高系统鲁棒 性,省去了旋转变换和电流控制,则可简化控制器 的结构。
感应电机直接转矩控制的Simulink模型

感应电机直接转矩控制的Simulink 模型摘要:直接转矩控制(DTC )是最优秀的感应电机转矩控制策略之一,被认为是磁场定向控制或矢量控制技术的替代技术。
这两种控制策略运作原理不同但目的相同,都是为了有效地控制转矩和磁通。
基于直接转矩控制(DTC )的感应电机转矩控制策略研究广泛开展并迅速发展。
该控制法的性能表现已经被通用仿真软件Matlab/Simulink 所证实。
已有多种数值模拟在快速控制模式的稳态和暂态下运行。
关键词:直接转矩控制,感应电机,矢量控制,Matlab/Simulink简介:多年来,感应电机提供着最常见的工业、商业和家庭应用的电驱动,其在本质上是以一个恒定速度控制的。
感应电机拥有比直流电机(DC motor )更简单,更稳固的结构,更高的可维护性和经济型。
他们都是稳定的,免疫重载的。
基本上,有两种类型的瞬时交流电磁转矩控制驱动被用于高性能应用,他们是: 矢量控制(VC ):基于使用PWM 逆变器控制的定子电流现场控制。
直接转矩控制(DTC ):基于使用逆变器开关直接控制的定子磁通控制。
直接转矩控制(DTC )已成为广为人知的感应电机矢量控制的一个替代控制法。
它于1984年被高桥(Takahashi )引入日本,并于1985年被Depenbrock 引入德国。
感应电机的直接转矩控制已经迅速成为矢量控制和场定位方法的最佳替代法。
图1显示了一个感应电机直接转矩控制系统。
这个直接转矩控制系统配置非常简单:在它的基础配置中包含磁滞控制器,转矩和磁通估值器(flux and torque estimator )和一个交换表(switching table )。
该配置相比在固定框架、同步框架和PI 调节器间缺少坐标变换的矢量控制系统简便很多。
它同样不需要单脉宽调制器和分别引入延迟及机械传感器的位置编码器。
基于直接转矩控制的驱动被控制在一种不适用电流环的闭环系统方式中。
直接转矩控制采用静态d-q 坐标系(固定定子)使d 轴同定子的q 轴对齐。
交流传动电力机车直接转矩控制策略实现

摘 要 : 接 转 矩 控 制 ( T 是 目前 应 用 于 交 流 传 动 电力 机 车 异 步 牵 引 电机 的 控 制 策 略 。 此 详 细 介 绍 了 异 步 牵 直 D C) 在 引 电 机 在 机 车 基 速 范 围 内 . T 的 实 现 方 式 . 通 过 Mal /i uik 搭 建 了 仿 真 模 型 , 最 后 在 基 于 DC t b Sm l a n
Vo. 6,N .0 1 4 o1
Oco r201 t be 2
对 于定子磁链幅值 , 设当前量 为 I I因此希 ,
由于上下两 种控制 方式在 结构 上差 异 巨大 ,
望 在 结束 时 , 子磁链 幅值 为 I I1 , 定 ( 最 在 选 择 切 换 时可 能 会 带 来 诸 如 转 矩 脉 动 等 不 利 影 后 可确 定预 测 的 = l1 e 1 ( j 啦 ) 么 响 .但 经 过 仿 真 和 实 验 发 现 保 持 一 定 的 采 样 率 和 ( , 那
上 升 至 安 全 上 限 , 续 减 小 载 波 比 , 低 . 形 成 继 拉 ,
了分段 同步 ( , 3 调 制 过 渡 。实 际工 作 . 电机 转 速 影 响很 大 ,只 有 受
在 转换 点 附近 , 得 以充分 利 用 ,而 只 有 一 直 让 才 逆变 器 工 作在 安全 上 限附近 , 能在 保 证期 间安 全 才
( b i tm bl Ids yIsi t,S i n 4 2 0 ,C ia Hu e Auo o i n ut ntu e r t e hy 4 0 2 hn ) a
Abtat D rc tru o t l D C) i ue n eetclcm t en W T e p n il o eD C ad i okn src : i t oq ecnr ( T e o s sd i lc oo o v O .h r c e ft T n t w rig i r i i p h s
基于Matlab与RecurDyn的电传动履带车辆的联合仿真
修稿日期:2007-06-20作者简介:赵玉慧(1981-),女,硕士研究生.臧克茂(1932-),男,教授,研究生导师.文章编号:1009-4687(2007)03-0024-04基于M a tl ab 与Recur D yn 的电传动履带车辆的联合仿真赵玉慧, 刘春光, 臧克茂(装甲兵工程学院控制系,北京 100072)摘 要:为了建立精确的履带车辆动力学模型,实现电传动控制系统负载的动态加载,以某型履带车辆为例,分别建立了基于Matlab 的控制系统模型和基于Recur Dyn 的动力学系统模型,通过Matlab 和Recur Dyn 间的接口技术对其进行联合仿真,为履带车辆电传动系统仿真提供了新的手段,为制定比较精确的整车控制策略提供了有效的技术支持.关键词:电传动;联合仿真;Recur Dyn中图分类号:U46916+94 TP39119 文献标识码:ACo -si m ul ati on of the Electr i c Dr i ved Ar mored Vehi cle Based on Matl ab and Recur DynZHAO Yu 2hui, L I U Chun 2guang, Z ANG Ke 2mao(Depart m ent of contr olling engineering of the Acade my of A r mored Force Engineering,Beijing 100072,China )Abstract:A contr ol syste m and a dyna m ic syste m of s o me tracked vehicle are modelled based on Matlab and Recur Dyn res pectively,and the t w o models are co -si m ulated with the Recur Dyn /contr ol interface t o establish an exact dyna m ic syste m model,and l oad the contr ol syste m dyna m icly .Si m ultaneously,it p r ovides a ne w method f or the si m ulati on of the tracked vehicle electric syste m and a more effective tech 2nique support for establishing a p recise contr ol strategy .Key words:electric drive;co -si m ulati on;Recur Dyn 在现有的电传动系统仿真研究中,驱动电机负载力矩通常根据车辆行驶理论数学模型计算得到1该方法建立的车辆动力学模型精度不高,且无法实现车辆电传动控制系统负载的动态加载1多体动力学仿真软件Recur Dyn 的Track /H M 模块为解决履带车辆运动学、动力学建模提供了新的手段1本文分别采用Matlab 和Recur Dyn 建立电传动系统的控制模型和动力学模型,采用Matlab 和Recur Dyn 间的接口技术实现了负载的动态加载,从而完成了电传动车辆的联合仿真11 电驱动系统控制模型与其它电动机相比,永磁同步电动机具有可靠性好、效率和功率密度高的优点,因此在该控制系统中采用永磁同步电动机作为其驱动电机,控制方2007年第3期车辆与动力技术Vehicle &Power Technol ogy总第107期法采用最常见的矢量控制技术[1]1111 电动机数学模型分析正弦波电流控制的调速永磁同步电动机最常用的方法是dq轴数学模型1忽略电动机铁心的饱和,不计电动机中涡流和磁滞损耗且认为电动机电流为对称的三相正弦波电流1则其电磁关系可表示为[1]:u d=R i d+pψd-ωψqu q=R i q+pψq+ωψd,(1)ψd=L d i d+ψfψq =L q i q.(2)其中 Lq,L d为电机q轴、d轴电感;R为电机定子绕组电阻;iq,i d为电机q轴、d轴电流;u q, u d为电机q轴,d轴电压;ω为电机转子角速度; p为电机磁极对数1机械运动方程为:dω/d t=J(T e-T m)/p.(3)其中 J为电机转动贯量;f为电机转动摩擦系数; T m为负载转矩;T e为电机电磁力矩1112 矢量控制矢量控制实际上是对电动机定子电流矢量相位和幅值的控制1由式(1)、(2)知,电动机的力矩取决于定子电流的空间矢量is,而i s的大小和相位又取决于is 和iq,即控制i d和i q便可控制电动机的力矩1通过这两个电流的控制,使实际id 和iq跟踪指令值i3d 和i3q,从而实现电动机力矩和转速的控制1为了充分发挥电机低速时的最大力矩,当控制系统处于恒力矩调速区时采用最大力矩/电流控制,为了使电动机能恒功率运行于更高的转速,当控制系统调速范围处于恒功率调速区时采用弱磁控制1113 电传动控制系统电传动系统控制简图如图1所示:ω和θ为检测出的电动机转速和角速度空间位移1检测到的转速与指令值比较后的偏差作为速度控制器的输入1速度控制器的输出即为力矩的指令值,力矩指令值作为力矩控制器的输入,根据前述的控制策略计算定子电流分量i3d 和i3q,经过矢量逆变换后即可得到电动机三相电流的指令值,采用滞环P WM电流控制实现流跟踪,从而实现电动机的控制1图1 永磁同步电动机传动系统简图2 负载模型为了提高该控制系统动力学模型的精度,系统使用Recur Dyn软件对整车行动部分多体动力学系统进行建模1Recur Dyn软件提供了高速履带系统工具包———Track/H M,其中包括各种履带系统组件,如主动轮、诱导轮、负重轮、托带轮、高速履带等1使用这些组件可以实现对车辆行动部分的精确建模1同时,Recur Dyn软件提供了Gr ound模块,用于建立各种地面模型1211 履带车辆行动部分建模某型履带车辆模型如图2所示1图2 履带车辆模型该模型含有左右侧两条履带子系统1每条履带系统由1个主动轮、1个诱导轮、6个负重轮、3个拖带轮和82块履带板组成,主动轮前置,采用双销式履带1履带系统中的所有轮子均与车体相连1主动轮、诱导轮、拖带轮及负重轮均以一个旋转副与车体相连,可以有相对车体的运动,悬挂系统采用扭杆式独立悬挂1在该模型中整车共有1 024个自由度、47个约束1建模时选取主动轮中心为固定坐标系,履带系统则相对于车体参考系,而属于履带系统的实体则相对履带系统参考系,车体参考位置及方向在全局坐标系中定义1由于履带电传动车辆是由永磁同步电机的输出力矩通过侧传动驱动主动轮旋转,再由主动轮带动履带板卷绕运动・52・ 第3期赵玉慧等:基于Matlab与Recur Dyn的电传动履带车辆的联合仿真的,因此,只要在主动轮上加力矩或运动学驱动方式后,即可对所建模型进行仿真1212 路面模型路面谱文件的建立是采用三角形平面缝合来确定路面形状的,每个三角形单元由三个节点组成1任何形式的路面模型均可通过改变三个节点的位置来建立1地面参数在履带系统中定义,每个履带系统可以有其自己的路面和路面参数1本文采用坡度为10°的重粘土路面,路面参数如图3所示,其中剪切变形系数为:01025,路面模型见图41图3 路面参数图4 路面模型3 联合仿真模型结合当前履带车辆仿真研究的状况和军队通用规范的要求,仿真前做以下假设条件:车辆的质心和车辆的几何中心重合;负重轮与履带认为是点接触,履带接地压力被认为是沿履带中心线集中分布;不考虑履带与地面的滑转和滑移现象1利用Recur Dyn /contr ol 接口技术将整车行动部分多体系统动力学模型和基于Matlab /Si m ulink 建立的电机控制系统模型结合起来,进行机械系统和控制系统联合仿真[2],实现控制系统负载的动态加载1如图5所示,给定电机角速度指令值400rad /s ,电传动控制系统的输出转速为ω1,ω2.ω1,ω2作为履带车辆动力学系统的输入量,其输出量为负载力矩T 1,T 2,而T 1,T2则为电传动控制系统中永磁同步电动机的负载输入,由此形成一个闭环控制系统1图5 电驱动控制系统模型与履带车辆模型的联合仿真 在建立联合仿真模型之前,首先要运行履带车辆的Recur Dyn 动力学模型,以确保该模型正确1联合仿真的具体步骤如下:①在Recur Dyn /contr ol 中定义履带车辆动力学模型的输入量ω1,ω2和输出量T 1,T 2,以及连接Recur Dyn 和Matlab 的tank 1m 文件1其中:ω1=P I N (ω1),ω2=P I N (ω2),T 1=TZ (Sprocketl .M ar Ker 1,M other 2body ..M ar Ker 18),T 2=TZ (Sprocketl .M ar Ker 2,M other 2・62・车辆与动力技术2007年 body ..M ar Ker 18);②关闭RecurDyn 软件,打开Matlab /Si m u 2link ,连接已经建立的电传动控制系统模型及履带车辆动力学系统模型;③设置联合仿真参数,运行Matlab /Si m ulink,则系统自动打开Recur Dyn 软件,并调用Recur Dyn 求解器进行整个机械系统的联合仿真计算14 仿真举例及结论①根据履带车辆直线行驶动力学理论,利用牛顿第二定律微分方程分析车辆运动状态与外力关系1不计空气动力阻力,建立行驶方程式[3]:P -fG cosα-G sin α=Gx ¨/g .(4)其中 P 为牵引力;f 为摩擦系数;G 为车重;α为行驶道路的坡角1电动机负载力矩为:T m =G (f co s α+sin α)・r z /2i η.(5)其中 r z 为主动轮半径;i 为总传动比;η为电动机效率1由式(5)计算得某型履带车辆在良好水泥路面上行驶的负载力矩为103N ・m ,在10°坡面上匀速行使时负载力矩为225N ・m 1基于Recur Dyn 的动力学仿真结果如图6所示1车辆起步时,负载力矩大约为100N ・m;车辆稳定行驶时负载力矩约为97N ・m ;t =14s 时车辆爬坡,负载力矩增大,其峰值约为760N ・m ;t =17s 后,车辆完全行使于坡面,负载力矩趋于稳定,其值约为210N ・m 1由此可知,采用Recur 2Dyn 动力学分析软件仿真结果与根据车辆行驶动力学模型理论计算得到的结果一致1图6 电动机负载力矩波形图②基于Matalb 的驱动系统仿真结果如图7所示10<t <3s 时,永磁同步电机恒力矩运行,力矩值约为490N ・m ,电机转速增大;0<t <14s 时,电机弱磁运行于“恒功率区”;t =14s 电机转速达到390rad /s ,电机力矩约为95N ・m ,此时车辆开始爬坡,转速下降、力矩增大;t =17s 后,电动机转速约为320rad /s ,车辆匀速行使于坡面上,力矩值约为210N ・m 1定子电流分量i d 和i q 运行轨迹如图8所示,符合最大力矩/电流运行和弱磁运行规律1图7 电机转速及力矩波形图图8 i d 、i q 波形图综上所述,本文分别建立了基于Matlab 的履带车辆控制系统模型和基于Recur Dyn 的履带车辆动力学系统模型,采用联合仿真的方法,实现了系统负载的动态加载,大大提高了求解精确度,为履带车辆电传动系统仿真提供了新的手段,为虚拟样机设计和制定精确的整车控制策略提供有效的技术支持1参考文献:[1] 臧克茂,马晓军.装甲车辆电力传动系统及其设计[M ].北京:国防工业出版社,2004.[2] 孙逢春,陈树勇.电传动履带车辆驱动系统建模与仿真研究[M ].北京:北京理工大学出版社,2006.[3] 王德胜,杨建华.装甲车辆行驶原理[M ].北京:装甲兵工程学院,1989.・72・ 第3期赵玉慧等:基于Matlab 与Recur Dyn 的电传动履带车辆的联合仿真。
基于MatlabSimulink设计的直接转矩控制系统仿真

基于MatlabSimulink设计的直接转矩控制系统仿真
师素娟;满达;马少丹
【期刊名称】《河南科技》
【年(卷),期】2015(000)024
【摘要】本文设计了一种基于MatlabSimulink软件仿真的直接转矩控制系统,通过其数学仿真功能设计出直接转矩控制系统的转矩调节、转速调节等模块,组成三相异步电动机的直接转矩控制系统.仿真结果证明了该方法能够准确的控制三相异步电动机的速度和转矩稳定输出.
【总页数】3页(P30-32)
【作者】师素娟;满达;马少丹
【作者单位】华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011
【正文语种】中文
【中图分类】TP273+.2
【相关文献】
1.基于智能算法的直接转矩控制系统仿真研究 [J], 辛丽;佘双翔;许志伟
2.基于圆形磁链的异步电动机直接转矩控制系统仿真 [J], 罗毅
3.基于神经网络的SRM直接转矩控制系统仿真研究 [J], 王勉华;王瑞;刘春元
4.基于SVPWM的异步发电机模糊直接转矩控制系统仿真 [J], 李岩
5.基于Saber的异步电动机直接转矩控制系统仿真 [J], 王刚
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直驶加速度 ,转矩之差克服转向阻力矩后直接决定 整车的横摆角加速度[2 ] 。
在转矩控制策略中 ,把驾驶员的控制信号 Input (加速踏板信号 、制动踏板信号 、方向盘信号) 和反馈 信号 Feedback 解释成满足车辆行驶的目标转矩信 号 T1 m 、T2 m , 电 动 机 及 其 控 制 器 实 现 力 矩 输 出 T1s 、T2s 。调节转矩的动力学控制策略任务就是依 托综 合 控 制 单 元 软 件 、硬 件 环 境 , 建 立 映 射 关 系 f ( Input ,Feedback) →( T1 m , T2 m ) ,使车辆在路面上 依据驾驶员控制信号行驶 ,控制方案如图 5 所示 。
2 履带车辆样机模型构建
性提供给车辆行驶不同的法向力 、牵引力和滚动阻 力 。到目前为止 , 尽管车辆地面力学已经取得了很 大的进展 ,但描述地面与车辆相互关系的参量一般 还是采用公认的地面滚动阻力系数 f 、地面附着系 数 φ及地面转向阻力系数μ。本虚拟样机路面模型 充分利用一般的试验统计数据 , 针对仿真需要 , 在 RecurDyn/ HM 模块中定义了水平硬质地面 ,地面附 着系数 φ为 017 , 转向阻力系数 μ 为 0149 , 滚动阻 力系数 f 为 0105[4 ] 。整车动力学模型及路面模型 如图 2 所示 。
α0 、β0 ———加速 、制动踏板自由行程 αmax 、βmax ———加速 、制动踏板最大角位移
图 6 为方向盘信号定义示意图 。具体表示为
1
(0 ≤< < <0)
< - <0 ξ= <1 - <0
( <0 ≤< < <1)
(4)
< - <0 <2 - <0
( <1 ≤< < <2)
图 6 方向盘信号定义示意图 Fig. 6 Steering wheel definition
T2 =ξλT max ( n2)
(2)
当控制量λ、ξ在区间[ - 1 , 1 ]取值时可以使用
左右侧电动机的转矩达到可获得的最大范围 。本文
基于以上思想建立映射关系 f ( Input , Feedback) → g (λ、ξ, Feedback) →( T1 m , T2 m ) , 定义加速踏板量 程对应 λ∈[0 ,1 ] ,制动踏板量程对应 λ∈[ - 1 , 0 ] , 方向盘信号对应ξ∈[ - 1 ,1 ] 。
Key words Tracked vehicle , Elect ric drive , Cont rol st rategies , RecurDyn , Matlab/ Simulink
引言
电传动履带车辆是比较复杂的机电混合系统 。 一般在设计带有控制系统的机械系统过程中 ,在控 制系统设计早期阶段面临着开发强健控制算法的困 难 ,主要原因是仅仅用控制系统设计工具建立非线 性动力学模型非常困难 。
对驾驶员输入信号的定义包括了加速踏板 、制动
踏板和方向盘位置信号定义 ,其主要目的是建立加速 踏板信号 、制动踏板信号与控制量 λ、ξ的关系 。
加速踏板信号和制动踏板信号定义为
α- α0
λ=
αmax - α0
-
ββmax
β0 - β0
(0 ≤λ≤1) ( - 1 ≤λ< 0)
(3)
式中 α、β———加速 、制动踏板角位移
213 电动机及其控制系统模型 本文研究重点不是电动机驱动系统 , 从工程应
用的角度考虑 ,利用电动机驱动系统试验数据在控 制软件 Simulink 中建立 Look2Up Table 模块 , 利用 查表功能实现驱动系统的响应过程 , 因电动机转动 惯量与整车惯量相比较小 , 对整车动态性能的影响 可以忽略[5 ] 。仿真模型如图 3 所示 。
2009年7月
农业机械学报
第 40 卷 第 7 期
基于 RecurDyn 和 Simulink 的电传动车辆转矩控制策略3
李 波 张承宁 李军求
(北京理工大学机械与车辆工程学院 , 北京 100081)
【摘要】 结合由多体动力学软件 RecurDyn 建立的履带车辆动力学模型及地面模型以及由 Matlab/ Simulink 建
211 车辆多体动力学模型 履带车辆多体动力学模型是基于 RecurDyn 软
件建立的某电传动履带车辆 ,车身由三维软件 Pro/ E 开发 ,通过. step 格式文件导入 RecurDyn 软件环境 中 ,两侧履带采用 RecurDyn/ HM 模块建模生成 。 通过设定各个部件运动副的约束形式后 ,建立整车 的动力学模型 。该车由车身子系统 、左右履带子系 统及地面子系统等组成 。左右履带子系统包括驱动 轮 、诱导轮 、托带轮 、负重轮和悬挂装置等 。整车有 207 个动力部件 (不含路面) ,建立模型时以车身重 心为 固 定 坐 标 系 。多 刚 体 系 统 自 由 度 计 算 公 式 为[3 ]
面之间的接触特性 。同时 ,利用基于多体动力学分 析软件和控制系统分析软件的接口技术对整车控制 策略进行联合仿真分析 ,验证所分析转矩控制策略 的可行性[1 ] 。
1 车辆结构与策略需求
电传动履带车辆结构如图 1 所示 ,主要由发动 机 、发电机 、整流器 、蓄电池组 、电动机控制器 、电动 机等组成 。电传动履带车辆的虚拟样机包括多体动 力学模型 、路面模型和控制系统及控制策略模型 3 部分 。发动机带动发电机发电 ,与动力电池组并 联后 ,向两侧电动机供电 ,产生所需牵引 (制动) 力 , 车辆的直线和转向行驶均通过改变两侧电动机转矩
因此 ,此种映射关系直接把驾驶员意图解释为
左右电动机的驱动转矩驱动车辆行驶 。其具体分析
归纳为
T1 T2
=λTmax ( n1) =ξλTmax ( n2)
(λ∈[0 ,1] ,ξ∈[0 ,1])
T1 T2
=λTmax ( n1) =ξλTmax ( n2)
(λ∈[0 ,1] ,ξ∈[
-
1 ,0])
转向过程
T1 T2
=ξλTmax ( n1) =λTmax ( n2)
(λ∈[
-
1 ,0] ,ξ∈[
-
1 ,1])
T1 T2
=ξλTmax ( n1) =λTmax ( n2)
收稿日期 : 2008 - 07 - 01 修回日期 : 2008 - 10 - 06 3 国家部委预研项目 (40402070104) 作者简介 : 李波 ,博士生 ,主要从事电动车辆技术研究 , E2mail : mzsp66 @163. com
2
பைடு நூலகம்
农 业 机 械 学 报 2 0 0 9 年
中图分类号 : TJ 81
文献标识码 : A
Torque Control Strategies Based on RecurDyn and Simulink f or Electric Drive Tracked Vehicle
Li Bo Zhang Chengning Li J unqiu
( School of Mechanical and V ehicular Engi neeri ng , Beiji ng Instit ute of Technology , Beiji ng 100081 , Chi na)
或者转速实现[2 ] 。由于车辆的直线行驶稳定性和 转向行驶性能完全依赖于控制策略的优劣 ,因此 ,准 确与实时的控制策略是车辆良好行驶的前提 。
图 1 电传动履带车辆结构框图 Fig. 1 Configuration of t he electric drive tracked vehicle
Abstract
The dynamic model and t he ground model were built by multi2body dynamics software RecurDyn , and t he drive motor cont rol system model was set up by Matlab/ Simulink. The dynamic model and cont rol system model were integrated to st ruct ure an entire vehicle virt ual protot ype model. Analyzing and building t he st rategies of torque adjust ment , analyzing t he driver’s intent , t he cont rol logic was built by Stateflow. Based on t he virt ual protot ype , t he co2simulation approach and t he testing of t he protot ype were applied to verify t he torque cont rol st rategies.
本文应用新一代多体动力学软件 RecurDyn 的 高机动履带车辆专业化工具包 Track/ HM 对整车 运动部件进行动力学建模 ,RecurDyn 采用相对运动 方程理论和完全递归算法 ,非常适合求解大规模及 复杂接触的多体动力学问题 , Track/ HM 为高机动 性履带包 ,可迅速建立履带车辆 ,分析履带链接和地
图 5 调节转矩控制策略方案
Fig. 5 Schematic of motor drive control
为实现对输入信号的解析 ,引入控制量λ、ξ, 规 定 - 1 ≤λ≤1 , - 1 ≤ξ≤1 , 假定两侧电动机具有相
同的最大转矩输出特性 Tmax ( n) 。对电动机的转矩 输出为