四旋翼飞行器控制系统ppt课件
合集下载
四轴飞行器课件(转)

算法上的实现
• 外环: (我的外环仅仅用了p项) • 外环输出值=p*(实际姿态解算角度值-平衡位置 姿态值-控制量) • exValue.Pitch_p =expidPitch.p*(Attitude.pitchControldata_PITCH-XStaticSet ); exValue.Roll_p =expidRoll.p*(Attitude.rollControldata_ROLL-YStaticSet ); • exValue.Yaw_p =expidYaw.p* (Attitude.yawSETYAW+Controldata_YAW);
谢谢大家
限幅
• • • • • • • • • • • • • • • • • • • if( PWM_XZ<MinPeriod) PWM_XZ=MinPeriod; else if( PWM_XZ>MaxPeriod) PWM_XZ=MaxPeriod; if( PWM_XF<MinPeriod) PWM_XF=MinPeriod; else if( PWM_XF>MaxPeriod) PWM_XF=MaxPeriod; if( PWM_YZ<MinPeriod) PWM_YZ=MinPeriod; else if( PWM_YZ>MaxPeriod) PWM_YZ=MaxPeriod; if( PWM_YF<MinPeriod) PWM_YF=MinPeriod; else if( PWM_YF>MaxPeriod) PWM_YF=MaxPeriod;
内环pd
• 内环输出=p*(实际角速度值+外环输出角 度值)-d*(当前角速度-上一次角速度) • 也就是将外环输出的角度值作为期望值加 入内环控制当中。
四旋翼飞行器PPT学习教案

四旋翼飞行器
会计学
1
一、什么是四旋翼飞行器
四旋翼飞行器,国外又称Quadrotor、Four-rotor 、4 rotors helicopter、X4-flyer等等,是一种具有四 个螺旋桨的飞行器并且四个螺旋桨呈十字形交叉 结构,如图1.1和图1.2所示。
图1.1 我校计算机毕业生组装的四 图1.2 香港银辉公司制造的X-UFO
第4页/共6页
三、四旋翼飞行器的应用及发展前景
1、军事领域 可用于侦查、监视、搜索、诱饵、干扰、图像传输、
对地攻击和编队作战等。由于受到各方面技术的限制, 一些难度系数比较大的任务还在研究当中。不过,我们 已经可以看出四旋翼飞行器在军事领域的重要地位了。
2、民用领域 可用于森林防火、航拍、测绘、电力线检测、灾
倒飞、侧飞及定点360度旋转等,可控性强,机动灵活。 由于四旋翼飞行器体积小,能够在非常狭小的空间中进行 飞行,并且产生的噪音也非常小,隐蔽性好。
2、能源利用率高 四旋翼飞行器所有需要供能的组件均为电子设备,直接
采用电能供电比油动型的飞行器的能源利用率要高很多, 而且还更加环保。
第3页/共6页
3、安全性高 四旋翼飞行器通过四个旋翼产生动力,相对于单旋翼
区勘测、交通及治安监控等,相对军事领域用途,民 用技术难度降低,需求也较为单一,前途一片光明。
就目前的技术而言,航拍为民用领域最为火爆的 用途。如果操控技术练习纯熟后,甚至可以拍摄一部 《鸟瞰新重邮》出来。
第5页/共6页
的直升机较高的转速而言,有效地降低了每个旋翼的最 高转速,再加上本身的重量较轻,在动力和结构两方面 的设计优势,使得飞行器对人及周边环境的破坏性较弱 。
4、续航时间短 四旋翼飞行器由电机驱动,飞行时就由电池供电,但
会计学
1
一、什么是四旋翼飞行器
四旋翼飞行器,国外又称Quadrotor、Four-rotor 、4 rotors helicopter、X4-flyer等等,是一种具有四 个螺旋桨的飞行器并且四个螺旋桨呈十字形交叉 结构,如图1.1和图1.2所示。
图1.1 我校计算机毕业生组装的四 图1.2 香港银辉公司制造的X-UFO
第4页/共6页
三、四旋翼飞行器的应用及发展前景
1、军事领域 可用于侦查、监视、搜索、诱饵、干扰、图像传输、
对地攻击和编队作战等。由于受到各方面技术的限制, 一些难度系数比较大的任务还在研究当中。不过,我们 已经可以看出四旋翼飞行器在军事领域的重要地位了。
2、民用领域 可用于森林防火、航拍、测绘、电力线检测、灾
倒飞、侧飞及定点360度旋转等,可控性强,机动灵活。 由于四旋翼飞行器体积小,能够在非常狭小的空间中进行 飞行,并且产生的噪音也非常小,隐蔽性好。
2、能源利用率高 四旋翼飞行器所有需要供能的组件均为电子设备,直接
采用电能供电比油动型的飞行器的能源利用率要高很多, 而且还更加环保。
第3页/共6页
3、安全性高 四旋翼飞行器通过四个旋翼产生动力,相对于单旋翼
区勘测、交通及治安监控等,相对军事领域用途,民 用技术难度降低,需求也较为单一,前途一片光明。
就目前的技术而言,航拍为民用领域最为火爆的 用途。如果操控技术练习纯熟后,甚至可以拍摄一部 《鸟瞰新重邮》出来。
第5页/共6页
的直升机较高的转速而言,有效地降低了每个旋翼的最 高转速,再加上本身的重量较轻,在动力和结构两方面 的设计优势,使得飞行器对人及周边环境的破坏性较弱 。
4、续航时间短 四旋翼飞行器由电机驱动,飞行时就由电池供电,但
六个自由度的四旋翼飞行控制原理
• 红外接收装置——接收到发射装置的信息传递给单片机。
• 中央处理——单片机将接收到的红外信息处理,发送到PWM装置, 控制发动机的转速改变。
动力电路开发(PWM控制电流装置)
PWM电流控制电路: 每个PWM控制 器由一组电桥、及其外部一个感应电 阻(Rs)、一个内部比较器和一个单 稳多谐振荡器组成,来独立感应和控 制输出电流。
输出电流的逻辑控制:两个输入逻辑信号(l0 和 I1)用于数 字选择电机线圈电流在其最大水平的百分比,100%, 67%, 33%, or 0%。0%的输出电流值说明电桥关闭了所有驱动并且 也作为一个器噪声 • 2.外部扰动 • 3.摩擦 • 4.风速
红外线接收器(接收信号)
反馈
单片机(中央处理)
PWM 步进电机(改变电流大小)
电机(转速改变) 飞行动作 轨道偏移
外部扰动
遥控电路开发(红外线装置)
• 四通道遥控器——上下、左右、前后、旋转 • 红外遥控装置——开关键,上升下降键,方向前后左右键。 (开关键:开启时,转速与飞行器重力刚好抵消,处于悬停 状态。关闭时,转速为零,处于停止状态。)
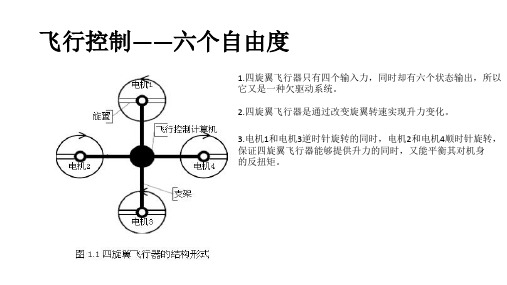
飞行控制——六个自由度
1.四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以 它又是一种欠驱动系统。 2.四旋翼飞行器是通过改变旋翼转速实现升力变化。 3.电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转, 保证四旋翼飞行器能够提供升力的同时,又能平衡其对机身 的反扭矩。
机载端控制电路版开发
四旋翼无人机方案PPT课件
赛亿方案集团
四旋翼无人机工作原理
➢ 无人机航拍飞控是一个集单片机技术、航拍传感器技术、GPS导航航拍 技术、通讯航拍服务技术、飞行控制技术、任务控制技术、编程技术等多技 术并依托于硬件的高科技产物,因此要能设计好一个飞控,缺少上面所述的 任何一项技术都是不可能的,越多的飞行经历和经验能为设计初期提供很多 避免出现问题的方法,使得试飞进展能够更顺利。
在别人的演说中思考,在自己的故事里成长
Thinking In Other People‘S Speeches,Growing Up In Your Own Story
讲师:XXXXXX
四旋翼无人机方案
目录
➢1、产品背景 ➢2、发展前景 ➢3、主要种类 ➢4、工作原理 ➢5、核心部件 ➢6、组成结构 ➢7、基本功能 ➢8、主要问题 ➢9、选择原则
赛亿方案集团
四旋翼无人机产品背景
➢ 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构 简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。 在突发事情应急、预警有很大的作用。
赛亿方案集团
谢谢!
赛亿方案集团
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
Thank You
赛亿方案集团
四旋翼无人机核心部件
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器
无人机 ➢ 遥控直升机
赛亿方案集团
四旋翼无人机基本功能
四旋翼无人机工作原理
➢ 无人机航拍飞控是一个集单片机技术、航拍传感器技术、GPS导航航拍 技术、通讯航拍服务技术、飞行控制技术、任务控制技术、编程技术等多技 术并依托于硬件的高科技产物,因此要能设计好一个飞控,缺少上面所述的 任何一项技术都是不可能的,越多的飞行经历和经验能为设计初期提供很多 避免出现问题的方法,使得试飞进展能够更顺利。
在别人的演说中思考,在自己的故事里成长
Thinking In Other People‘S Speeches,Growing Up In Your Own Story
讲师:XXXXXX
四旋翼无人机方案
目录
➢1、产品背景 ➢2、发展前景 ➢3、主要种类 ➢4、工作原理 ➢5、核心部件 ➢6、组成结构 ➢7、基本功能 ➢8、主要问题 ➢9、选择原则
赛亿方案集团
四旋翼无人机产品背景
➢ 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构 简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。 在突发事情应急、预警有很大的作用。
赛亿方案集团
谢谢!
赛亿方案集团
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
Thank You
赛亿方案集团
四旋翼无人机核心部件
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器
无人机 ➢ 遥控直升机
赛亿方案集团
四旋翼无人机基本功能
四轴飞行器PPT

3.4 无刷马达旋转螺旋桨来提 供升力,以推动飞行器。与有 刷马达相比,无刷马达具有扭 % 力大、低耗损的优点,但由于 其结构,必须加上一些电路与 较为复杂的方法控制。本次使 用KV的无刷马达。见图四
Байду номын сангаас
50
图四
图三
3.5 电池提供控制板与马达电源。本 次专题使用11.1V1500mAh的锂电池( 最大放电25C,瞬间35C),如图五所 示。
映射到电机
32%
4
成果展示
2
系统整体框图
四轴飞行器的系统运作示意图如右 图所示,微控制器从传感器读取信 息,转换成飞行器姿态,飞行器上 的微控制器依此当前姿态,转换成 PWM信号控制电调,改变无刷电机 转速,来达到自主平衡与方向控制 。
传感器组
四轴飞行器
I^2C总线
PWM 单片机 电调 无刷电机
32%
3
硬件及软件设计
此次四轴飞行器的结构由两对正反桨、四颗无 刷马达、四个电子调速器(电调)、一颗电池构成 。 3.1 机身用来放置控制器、马 达、电池…等等的平台。机身 的大小,会限制螺旋桨的长度 ,进而影响到负载的大小;机 身的硬度,会使感测器受到马 达所产生震动影响的大小。本 次专题使用对角长度250mm的 机身。如图一
研究背景及意义:
近年来,由于微机电系统(Micro Electro Mechanical Systems,MEMS)技术快速发展,同时低成本、普及的传感器的产 生。便出现以算法与传感器为核心的四轴飞行器成为热门的研究课 题,其有着重量轻、体积小、结构简单、机动性高、维护方便等优 点。 四轴飞行器基于以上优点,可以应用于实时监控、地形探勘、 灾区救援及收寻。
3.7 惯性测量单元(IMU) 如图为单片机的I2C接口与传 感器的连接示意。 % 使用I2C总线即可与多个装置 通信。 本次使用MPU6050(三轴加速 度陀螺仪传感器)与HMC5883 (电子罗盘)。
四旋翼飞行器控制系统ppt课件

7
四旋翼飞行器的6种 基本运动状态
8
9
总体结构
电池
电调1 电调2 电调3 电调4
传感器
飞行控制板
10
电机1 电机2 电机3 电机4
无线传输模块
控制系统电源
四旋翼飞行器采用3.7伏 锂电池供电,用1sUSB充 电器给锂电池进行充电。
11
飞行控制板
四旋翼飞行控制板计划采用STM32作 为主控制器,STM32是一款基于ARM的 32位MCU的闪存、USB、CAN、7个16 位定时器、两个ADC和9个通信接口的芯片。 STM32丰富的片上资源可满足各类传感器 通讯需求,与传统飞行控制器相比,大大的 降低了开发成本,节约了资源。是一款非常 适合本项目开发使用的单片机。
12
无线通信模块
无限通信模块采用2.4G无线收发 模块nRF24L01来实现四旋翼飞行器 与遥控器之间信息的交互,实现遥控 器对四旋翼飞行器的操控,遥控器用 一块1S锂电池经升压板输出9伏电压 作为电源。
13
传感器
为实现四旋翼飞行器的人工智能,除采用传 统的6轴传感器MPU6050,我们将尝试用超声 波传感器,红外传感器,增加摄像头,用DSP芯 片进行数据处理实现自动壁障,加入电压传感器, 实现对电源的实时监控,加入了GPS全球卫星定 位系统使其拥有了自动导航等功能,在本系统的 基础上,我们还将添加电子罗盘,将偏航角引入 到导航计算中,从而使飞行器的飞行路线更加精 确与稳定。
14
程序流程图
开始 系统初始化 接受解码遥控信号 设置相应飞行参数
3ms中断?
进行短周期数据融合 数据采集次数=160xn?
进行长周期数据融合 控制量输出
采集传感器数据
15
四旋翼飞行器的6种 基本运动状态
8
9
总体结构
电池
电调1 电调2 电调3 电调4
传感器
飞行控制板
10
电机1 电机2 电机3 电机4
无线传输模块
控制系统电源
四旋翼飞行器采用3.7伏 锂电池供电,用1sUSB充 电器给锂电池进行充电。
11
飞行控制板
四旋翼飞行控制板计划采用STM32作 为主控制器,STM32是一款基于ARM的 32位MCU的闪存、USB、CAN、7个16 位定时器、两个ADC和9个通信接口的芯片。 STM32丰富的片上资源可满足各类传感器 通讯需求,与传统飞行控制器相比,大大的 降低了开发成本,节约了资源。是一款非常 适合本项目开发使用的单片机。
12
无线通信模块
无限通信模块采用2.4G无线收发 模块nRF24L01来实现四旋翼飞行器 与遥控器之间信息的交互,实现遥控 器对四旋翼飞行器的操控,遥控器用 一块1S锂电池经升压板输出9伏电压 作为电源。
13
传感器
为实现四旋翼飞行器的人工智能,除采用传 统的6轴传感器MPU6050,我们将尝试用超声 波传感器,红外传感器,增加摄像头,用DSP芯 片进行数据处理实现自动壁障,加入电压传感器, 实现对电源的实时监控,加入了GPS全球卫星定 位系统使其拥有了自动导航等功能,在本系统的 基础上,我们还将添加电子罗盘,将偏航角引入 到导航计算中,从而使飞行器的飞行路线更加精 确与稳定。
14
程序流程图
开始 系统初始化 接受解码遥控信号 设置相应飞行参数
3ms中断?
进行短周期数据融合 数据采集次数=160xn?
进行长周期数据融合 控制量输出
采集传感器数据
15
四旋翼飞行器无线遥控技术PPT文档共65页
1.3 遥测和遥控的关系及开环、闭环控制系统 (1)遥控和遥测的关系:
控制端
被控对象 监测系统
常用的监测系统:遥测、雷达和电视监控等。
(2)闭环控制系统:有完善的监测系统(设备)的遥控 系统。
(3)开环控制系统:无需监测设备的简单遥控系统(监 测常由控制者的眼睛实现)。
无线电遥控的特点 无线电遥控式使用无线电为载体来传送遥控命令的,具有较强 的辐射能力,能穿越墙壁和障碍物,遥控距离远等特点。 无线电遥控的缺点是,容易引起互相干扰。为避免互相干扰造 成误操作,也为避免其他众多的无线电发射装置所发射的无线 电波对遥控装置的干扰,在实际应用中,必须采用编码技术。
频 频分制单路遥控设备:在同一时间内仅可传送一个控制指令。 分 制 遥 控 设 备 频分制多路遥控设备:同一时间内可以同时传送多个控制指令。
➢ 遥控指令:遥控系统中由控制端向被控端传送的指示被控对象工作或如 何工作的命令(信号) 。 遥控指令的特点:特征明显、相互间易于区分(电信号)。例如 用不同频率代表不同的指令,或用不同幅度、脉宽、相位及码组特征等 表尔各种指令,也可用声音、图像、文字、数据等作为遥控用的指令信 号。
遥控指令的输入方式:按键、开关、键盘,还有声音、光信号。
所有遥控方式均由发射与接收两大部分组成。其中发射电路的主要作用 是产生载波,并由调制解调器将指令信号调制在载波上,经天线将以调 制载波发射出去。接收电路包括高频部分及解调器部分(解码器)。
指 令编 产码 生器 器
发 射 电 路
接 收 电 路
译 码 器
处 理 器
执 行 机 构
图2.无线遥控系统结构图
控制指 令
➢ 多路多通道——可在同一时间内同时传送多个遥控指令,它的 执行机件在同一时间内可同时执行或动作。多路多通道的无线
四旋翼飞行器飞行控制系统设计PPT课件
y k(x b) x为陀螺仪输出电压, y为旋转角速度
k为输出电压到旋转角速度的比例系数 b为陀螺仪输出电压零点。
第19页/共21页
七、多传感器融合—卡尔曼滤波
计算观测向量
选取状态矢量
+
+
vk
Kk
-
+
xk
CkБайду номын сангаас
Ak-1
Xk|k-1
delay
卡尔曼滤波算法就是预测和修正 的不断递归。预测新的状态和协 方差,然后利用观测向量对状态 和协方差进行修正。
二、四旋翼飞行器控制的特点
四旋翼飞行器有四个输入力、六个输出(即 六自由度,包括绕三个轴的转动:俯仰、偏 航和滚转,重心三个轴的线运动:进退、左 右、侧飞和升降),所以它是一种欠驱动系 统(少输入多输出系统)。这种系统容易导 致不稳定,需要确保长期稳定的控制方法。
第6页/共21页
二、四旋翼飞行器控制的特点
(Kd Kl
U4
K afz ) / Iz
输出量
U1 输入量
U2
U3
U4 控制三个位置x,y,z; 控制横滚角 ; 控制俯
仰角 ; 控制偏航角 第16页/共21页
六、捷联惯性导航—姿态解算
硬件
• 加速度计、陀螺仪、数字罗盘 • 加速度计输出基于载体坐标系的加速度,数字罗盘输出基于载体坐标系的磁场强度,二者结合可解算
(dU2 K afx ) / Ix
(dU3 K afy ) / I y
(Kd Kl
U4
K afz ) / Iz
第15页/共21页
五、传递函数矩阵
选择后四行进行控制
z (U1 Kdtz y mg) / m
k为输出电压到旋转角速度的比例系数 b为陀螺仪输出电压零点。
第19页/共21页
七、多传感器融合—卡尔曼滤波
计算观测向量
选取状态矢量
+
+
vk
Kk
-
+
xk
CkБайду номын сангаас
Ak-1
Xk|k-1
delay
卡尔曼滤波算法就是预测和修正 的不断递归。预测新的状态和协 方差,然后利用观测向量对状态 和协方差进行修正。
二、四旋翼飞行器控制的特点
四旋翼飞行器有四个输入力、六个输出(即 六自由度,包括绕三个轴的转动:俯仰、偏 航和滚转,重心三个轴的线运动:进退、左 右、侧飞和升降),所以它是一种欠驱动系 统(少输入多输出系统)。这种系统容易导 致不稳定,需要确保长期稳定的控制方法。
第6页/共21页
二、四旋翼飞行器控制的特点
(Kd Kl
U4
K afz ) / Iz
输出量
U1 输入量
U2
U3
U4 控制三个位置x,y,z; 控制横滚角 ; 控制俯
仰角 ; 控制偏航角 第16页/共21页
六、捷联惯性导航—姿态解算
硬件
• 加速度计、陀螺仪、数字罗盘 • 加速度计输出基于载体坐标系的加速度,数字罗盘输出基于载体坐标系的磁场强度,二者结合可解算
(dU2 K afx ) / Ix
(dU3 K afy ) / I y
(Kd Kl
U4
K afz ) / Iz
第15页/共21页
五、传递函数矩阵
选择后四行进行控制
z (U1 Kdtz y mg) / m
四轴飞行器概述ppt课件
5
Fig. 1-2 aircraft designed by University of Pennsylvania
Gabriel M. Hoffmann, Steven W. Waslander and Michael P.Vitus are come from Stanford University. They design a aircraft which fly indoor automatically. They combine the information provided by GPS/INS/EC through the extended Kalman filtering algorithm so as to control the stability of aircraft. The aircraft can travel independently through the waypoint preset, meanwhile, it can transmit the flight parameters and image information to mission station real-time through Wi-Fi. We can see the picture in Fig. 1-3.
6
Fig. 1-3 aircraft designed by Stanford University
Home
The domestic research of four rotor unmanned aerial vehicle is at the start stage , technology level is relatively low, but our country are trying to study this kind of aircraft. It is of great significance to do this in the forthcoming future. National University of Defense Technology, Harbin Institute of T7echnology and Beihang University are the leaders in our country.
Fig. 1-2 aircraft designed by University of Pennsylvania
Gabriel M. Hoffmann, Steven W. Waslander and Michael P.Vitus are come from Stanford University. They design a aircraft which fly indoor automatically. They combine the information provided by GPS/INS/EC through the extended Kalman filtering algorithm so as to control the stability of aircraft. The aircraft can travel independently through the waypoint preset, meanwhile, it can transmit the flight parameters and image information to mission station real-time through Wi-Fi. We can see the picture in Fig. 1-3.
6
Fig. 1-3 aircraft designed by Stanford University
Home
The domestic research of four rotor unmanned aerial vehicle is at the start stage , technology level is relatively low, but our country are trying to study this kind of aircraft. It is of great significance to do this in the forthcoming future. National University of Defense Technology, Harbin Institute of T7echnology and Beihang University are the leaders in our country.
四旋翼无人机方案PPT课件
赛亿方案集团
四旋翼无人机核心部件
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器
赛亿方案集团
四旋翼无人机主要种类
➢ 固定翼无人机 ➢ 多轴无人机 ➢ 遥控直升机
赛亿方案集团
四旋翼无人机基本功能
➢ 拍摄 ➢ 研究传染病 ➢ 急救 ➢ 找地雷 ➢ 防止非法捕鱼
赛亿方案集团
四旋翼无人机主要问题
赛亿方案集团
谢谢!
赛亿方案集团
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
Thank You
赛亿方案集团
四旋翼无人机组成结构
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器 ➢ 感应器 ➢ 遥控器 ➢ 机翼
赛亿方案集团
选择方案公司原则
➢ 1、考察公司的历史和工程师的数量及水平 ➢ 2、看他们公司技术研发实力以及科研方向 ➢ 3、查询公司的相关成功案例 ➢ 4、看公司的未来发展定位 ➢ 5、看公司相关业务人员的配合程度
四旋翼无人机方案
目录
➢1、产品背景 ➢2、发展前景 ➢3、主要种类 ➢4、工作原理 ➢5、核心部件 ➢6、组成结构 ➢7、基本功能 ➢8、主要问题 ➢9、选择原则
赛亿方案集团
四旋翼无人机产品背景
➢ 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构 简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。 在突发事情应急、预警有很大的作用。
四旋翼无人机核心部件
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器
赛亿方案集团
四旋翼无人机主要种类
➢ 固定翼无人机 ➢ 多轴无人机 ➢ 遥控直升机
赛亿方案集团
四旋翼无人机基本功能
➢ 拍摄 ➢ 研究传染病 ➢ 急救 ➢ 找地雷 ➢ 防止非法捕鱼
赛亿方案集团
四旋翼无人机主要问题
赛亿方案集团
谢谢!
赛亿方案集团
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
Thank You
赛亿方案集团
四旋翼无人机组成结构
➢ 智能控制板 ➢ 发动机 ➢ 高清摄像头 ➢ LED显示器 ➢ 感应器 ➢ 遥控器 ➢ 机翼
赛亿方案集团
选择方案公司原则
➢ 1、考察公司的历史和工程师的数量及水平 ➢ 2、看他们公司技术研发实力以及科研方向 ➢ 3、查询公司的相关成功案例 ➢ 4、看公司的未来发展定位 ➢ 5、看公司相关业务人员的配合程度
四旋翼无人机方案
目录
➢1、产品背景 ➢2、发展前景 ➢3、主要种类 ➢4、工作原理 ➢5、核心部件 ➢6、组成结构 ➢7、基本功能 ➢8、主要问题 ➢9、选择原则
赛亿方案集团
四旋翼无人机产品背景
➢ 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构 简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。 在突发事情应急、预警有很大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
7
四旋翼飞行器的6种 基本运动状态
.
8
.
9
总体结构
电池
电调1 电调2 电调3 电调4
传感器
.
飞行控制板
10
电机1 电机2 电机3 电机4
无线传输模块
ห้องสมุดไป่ตู้
控制系统电源
❖ 四旋翼飞行器采用3.7伏 锂电池供电,用1sUSB充电 器给锂电池进行充电。
.
11
飞行控制板
四旋翼飞行控制板计划采用STM32作 为主控制器,STM32是一款基于ARM的 32位MCU的闪存、USB、CAN、7个16 位定时器、两个ADC和9个通信接口的芯片。 STM32丰富的片上资源可满足各类传感器 通讯需求,与传统飞行控制器相比,大大的 降低了开发成本,节约了资源。是一款非常 适合本项目开发使用的单片机。
❖ 6.使用了GPS全球卫星定位系统,使飞行器具备 了自主导航、自动返航、地理围栏等传统人工遥 控导航飞行器所不具备的功能
.
17
应用前景
❖ 本项目研究成果将为四旋翼飞 行器更加出色的完成各种任务提供 无限可能,也可用于航拍、室内狭 小空间的侦查任务 、实时监控 、 儿童玩具等方面。拥有广阔的市场 前景。
.
5
项目计划目标
❖ 计划目标是在实际测试中,四旋翼飞 行器能完成从自主起飞,然后根据预设的 航迹点进行自主巡航飞行,悬停在空中或 超低空来获取需要的数据或完成一些简单 的任务,最后进行自主降落等一系列科目。 同时可以切换人工/自动模式,实现双模 式共同操作四旋翼飞行器。
.
6
四旋翼飞行器原理
❖ 四轴的控制原理就是,当没有外力并且重量 分布平均时,四个螺旋桨以一样的转速转动,在 螺旋桨向上的拉力大于整机的重量时,四轴就会 向上升,在拉力与重量相等时,四轴就可以在空 中悬停。在四轴的前方受到向下的外力时,前方 马达加快转速,以抵消外力的影响从而保持水平, 同样其它几个方向受到外力时四轴也是可以通过 这种动作保持水平的,当需要控制四轴向前飞时, 前方的马达减速,而后方的马达加速,这样,四 轴就会向前倾斜,也相应的向前飞行,同样,需 要向后、向左、向右飞行也是通过这样的控制就 可以使四轴往我们想要控制的方向飞行了。
四旋翼飞行器控制系统
❖ 所属系统: ❖ 项目负责: ❖ 指导教师:
.
1
项目简要
❖ 该项目是利用单片机通过调节电机转 速来控制飞行器飞行展开的,通过调节电 机来实现四旋翼飞行器飞行姿态的控制, 使其实现垂直运动、俯仰运动、滚转运动、 偏航运动、前后运动、侧向运动等6种基本 运动状态,利用陀螺仪进行物体姿态检测, 利用智能传感器技术和GPS全球卫星定位 系统使飞行器在无人操控的情况下实现智 能化自主导航、自动返航、地理围栏等功 能。
.
2
项目意义
通过该项目可以提高小组成员的 团队协作能力,有利于培养的实践创 新意识与基本能力;有助于工程实践 素质的培养、提高小组成员针对实际 问题进行电子设计制作的能力。这一 项目对于本专业的学习具有不可忽视 的推动作用。
.
3
设计背景
四轴飞行器要完成各种任务就需要依赖人工 无线电遥控导航,人工遥控导航飞行只能在视野 范围内进行,如果四轴飞行器要执行视野范围外 的任务,就必须自主导航。目前国内四旋翼飞行 器多为人工遥控航模四旋翼飞行器,依赖于人工 遥控,缺乏自主能动性。且受模型准确性和传感 器合理性等影响,飞行姿态难以实现精准控制, 基于这些缺点,我们提出四旋翼飞行器控制系统 这一项目。
❖ 2.采用2.4G无线收发模块nRF24L01,保证了 信息的传输。
❖ 3.采用了C语言编写单机程序,条理清晰。
❖ 4.使用了PID控制器进行飞行器的姿态控制,无 需对飞行器进行精准的数学建模,且PID控制器 结构简单,稳定性好,工作可靠,调整方便。
.
16
创新点
❖ 5.使用了智能传感器技术,与传统飞行器相比更 具智能化。
.
4
国内四旋翼飞行器
发展现状
v 2009年,一台叫做“旋翼飞行机器人” 的空中多功能自主飞行机器人在中国中科 院沈阳自动化研究所研制成功,并在灾害 搜救的实际测试中取得很好的效果。 近年 来,国内四旋翼飞行器发展迅速,由人工 遥控导航向自主导航发展,它们被用于许 多不同领域:航空摄影、空中考古、空中 监视、植被调查、消防救灾、边境控制、 警察、特种部队和军队等等。
.
18
实施思路
首先,小组成员对项目进行分析规划,制 定合理计划,通过指导老师指导、查阅相关书 籍等方式对所需知识进行积累。
其次,小组成员了解项目原理并在软件上 仿真实现。
再次,购买所需设备,组装焊接完成项目 产品。
最后,完成项目产品的软硬件调试。
.
19
谢谢!
.
20
.
14
程序流程图
开始 系统初始化 接受解码遥控信号 设置相应飞行参数
3ms中断?
进行短周期数据融合 数据采集次数=160xn?
进行长周期数据融合 控制量输出
采集传感器数据
.
15
创新点
❖ 1.采用STM32作为主控制器,增强了处理速度。 STM32丰富的片上资源可满足各类传感器通讯 需求,与传统飞行控制器相比,大大的降低了开 发成本,节约了资源。
.
12
无线通信模块
❖ 无限通信模块采用2.4G无线收发 模块nRF24L01来实现四旋翼飞行器 与遥控器之间信息的交互,实现遥控 器对四旋翼飞行器的操控,遥控器用 一块1S锂电池经升压板输出9伏电压 作为电源。
.
13
传感器
❖ 为实现四旋翼飞行器的人工智能,除采用传 统的6轴传感器MPU6050,我们将尝试用超声 波传感器,红外传感器,增加摄像头,用DSP芯 片进行数据处理实现自动壁障,加入电压传感器, 实现对电源的实时监控,加入了GPS全球卫星定 位系统使其拥有了自动导航等功能,在本系统的 基础上,我们还将添加电子罗盘,将偏航角引入 到导航计算中,从而使飞行器的飞行路线更加精 确与稳定。