机器人足球系统的设计与控制研究
RoboCupdx型组足球机器人系统及相关技术研究

论 文 《 n e i g o o s 中 提 出 ] 0 S e n R b t  ̄ 。这 一 提 议 干 导
广 泛 赞 同 和 积 极 响 应 。 l 9 年 , 经 一 些 学 者 积 极 93 划 , 由S N 出 资 在 瑞 士 注 册 成 立 了R b C p 盟 ( OY o ou联 T R b C p e e a i n , 其 宗 旨是 国 际 社 会 共 同 o o u F d r t o )
决 策 等 多 学 科 领 域 。 对 此 标 准 问题 的研 究 成 果 不 仅 能
够 反 映 一 个 国家 信 息 与 自动 化 领 域 的综 合 实 力 , 至实际应 用的 中介 和桥
梁 ,促 进 产 、 学 、研 相 结 合 , 有 效 推 动 相 关 学 科 领 域
1序 言
R b C p 器 人 足 球 世 界 杯 比赛 是 为 人 工 智 能 和 o o u机 智 能 机 器 人 技 术 研 究提 供 测 试 和 研 究 平 台 而 提 出 的 标
准 基 础 研 究 课 题 … 。在 人 工 智 能 研 究 早 期 , 计 算 机 象 棋 作 为 标 准 研 究 平 台 发 挥 了 巨 大 作 用 。 但 随 着 “深
制 、 实 时 数 字 信 号 处 理 、 图像 处 理 与 图像 识 别 、无 线
通 讯 、知 识 工 程 与 专 家 系 统 、路 径 规 划 、 智 能 控 制 与
2 R b C pJ型组 足 球机 器 人 体 系结 构 oo u/  ̄
R b C p  ̄ 组 机 器 人 足 球 比赛 在 各 有 5 小 oo ud型 个
控 制 方 法 的 良好 测 试 平 台 。
知识处 理发展到 实时决策 与知识处理 …,从而将人 工
类人足球机器人控制系统的设计与实现

江 南 大 学 学 报 (自 然 科 学 版 )
J u n l f in n nUnv ri ( tr l c n eE i o ) o r a a g a iest Nau a i c dt n oJ y S e i
Vo . No 1 19 .
机 器人技 术 作 为信 息 技 术 和先 进 制 造 技术 的
典 型代表 和主要技 术 手段 , 已成 为世 界 各 国竞相 发 展 的技术 。 目前最 尖端 的机器 人 技术 是类 人 型 机器
以20 年 中 国机器 人大赛 暨 R bC p公开赛 为例 , 08 oo u
类人 组开展 的是 33比赛和 技术挑 战赛 , 间只有 4 v 期 只 队伍参加 了 比赛 。 中主要 介绍 实 验室 类 人 足球 文
中图分类 号 : P2 2 6 文献标识 码 : 文章编 号 :6 1—7 4 ( 0 0 0 T 4 . A 17 17 2 1 ) 1—0 5 0 6—0 5
De i n a d I p e e a i n o u a i o c r Ro o sg n m l m nt to f H m no d S c e b t
HU Jn d n i - o g, L U G o d n , CHEN Na —u I u -o g G n r i
( c ol f o m nct nadC nrl n ier g J n nnU ies y Wu i 112 hn ) Sh o o m u iai n ot g ei , i g a nvri , x 24 2 ,C ia C o oE n n a t
控制 系统是 机器人 设计 中最关 键 的一部 分 , 一
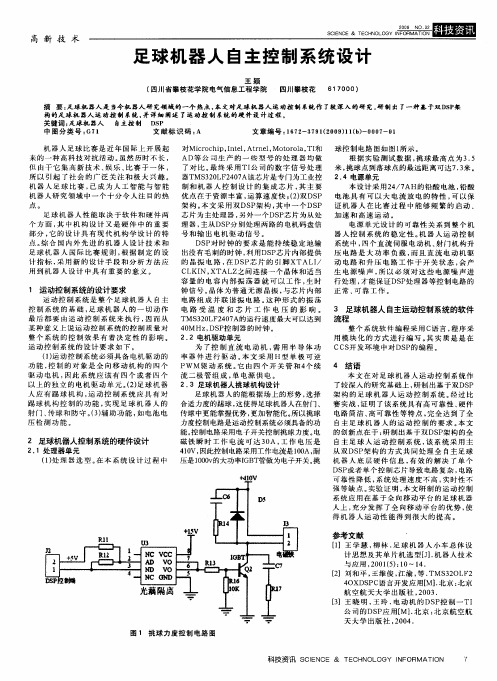
足球机器人自主控制系统设计
足球 机 器 人 性 能 取 决 于 软 件 和 硬 件 两 个 方 面 , 中 机 构 设 计 又 是 硬 件 中 的 重 要 其 部 分 , 的 设 计 具 有 现 代 机 构 学 设 计 的 特 它 点 。 合 国 内 外 先 进 的 机 器 人 设 计 技 术 和 综 足 球 机 器 人 国 际 比赛 规 则 , 据 制 定 的 设 根 计 指 标 , 用 新 的 设 计 手 段 和 分 析 方 法 应 采 用 到 机 器 人 设 计 中具 有 重 要 的 意 义 。
2 足球机器人控制 系统 的硬 件设 计
2 1处 理器 单元 . () 理 器 选 型 。 本 系 统 设 计 过 程 中 1处 在
球 控 制 电路 图 如 图 1 示 。 所 AD等 公 司 生 产 的 一 些 型 号 的 处 理 器 均 做 根 据 实验 测 试 数 据 , 球 最 高 点 为 3 5 挑 . 了对 比 。 终 采 用 T 公 司 的数 字 信 号 处 理 米 , 最 I 挑球 点到 落球 点 的最 远 距离 可达 7 3 。 .米 器T 3 0 F 4 7 Ms 2 L 2 O A该 芯片 是 专门 为工 业控 2 4 电源单 元 . 制 和 机 器 人 控 制 设 计 的 集 成 芯 片 , 主 要 其 本 设 计 采 用2 / AH的 铅 酸 电池 , 酸 47 铅 优 点在 于 资 源 丰 富 , 算 速 度快 ; ) D P 运 ( 双 S 电 池 具 有 可 以 大 电流 放 电 的 特 性 , 以 保 2 可 架 构 。 文采 用双 DS 架 构 , 中 一个 DS 证 机 器 人 在 比 赛 过 程 中 能 够 频 繁 的 启 动 、 本 P 其 P 芯片 为 主处 理 器 , 另外 一 个D P 片 为从 处 加 速 和 高 速 运 动 。 S 芯 理器 , 主从 DS P分 别处 理 两路 的 电 机码 盘 信 电源 单 元 设 计 的可 靠 性 关 系 到 整 个机 号 和输 出 电机 驱 动 信 号 。 器 人 控 制 系统 的 稳 定 性 。 器 人 运 动 控 制 机 D P 时钟 的 要 求 是 能 持 续 稳 定 地 输 系统 中 , 个 直流 伺服 电动 机 、 门 机 构升 S 对 四 射 出没 有 毛刺 的 时 钟 , 用D P 片 内部 提 供 压 电 路 是 大 功 率 负 载 , 且 直 流 电 动 机 驱 利 S 芯 而 的 晶 振 电路 , DSP芯 片 的 引 脚 XTALI 动 电 路 和 升 压 电 路 工 作 于 开 关 状 态 , 产 在 / 会 C KI X AL 之 间连 接 一 个 晶体 和 适 当 生 电 源 噪 声 , 以 必 须 对 这 些 电 源 噪 声 进 L N, T Z 所 容 量 的 电 容 内 部 振 荡 器 就 可 以 工 作 , 时 行 处 理 , 生 才能 保 证 D P 理 器 等控 制 电路 的 S处 钟 信 号 。 体 为普 通 无源 晶振 , 芯 片 内 部 正 常 、 靠 工作 。 晶 与 可 电路 组 成 并 联 谐 振 电 路 。 种 形 式 的 振 荡 这 电 路 受 温 度 和 芯 片 工 作 电 压 的 影 响 。 3 足球 机器人 自主 运动控制 系统 的软件 TMS 2 L 2 0 A的运 行速 度 最大 可以 达到 流程 30 F4 7 4 MHz DS 控 制 器 的 时钟 。 0 , P 整 个 系 统 软 件 编 程采 用 C语 言 , 序 采 程 2 2 电机 驱 动单 元 . 用 模 块 化 的 方 式 进 行 编 写 。 实 质 是 是 在 其 为 了 控 制 直 流 电 动 机 , 用 半 导 体 功 C S 需 C 开发 环 境 中对 D P 编程 。 S 的 率 器 件 进 行 驱 动 。 文 采 用 H型 单 极 可 逆 本 P M 驱 动 系 统 。 由 四 个 开 关 管 和 4 续 4 结 语 w 它 个 流 二极 管 组 成 , 电 源 供 电 。 单 本 文 在 对 足 球 机 器人 运 动 控 制 系统 作 2 3 足 球机 器人 挑 球机 构 设计 . 了较 深 入的 研 究 基础 上 , 制 出基 于 双DS 研 P 足球 机 器 人 的 能根 据场 上的 形 势 , 择 架 构 的 足 球 机 器 人 运 动 控 制 系 统 。 过 比 选 经 合 适 力度的 踢球 , 这使 得足球 机 器人 在射 门 、 赛 实 战 , 明 了该 系统 具 有 高 可 靠 性 、 件 证 硬 传 球 中更能掌 握优 势 , 更加 智能化 。 以挑球 电路 简 洁 、 可靠 性 等 特 点 , 全达 到 了全 所 高 完 力度控 制 电路 是运 动控 制 系统必 须具 备的 功 自主 足 球 机 器 人 的 运 动 控 制 的 要 求 。 文 本 能。 控制 电路 采用 电子 开关控 制挑 球 力度 。 电 的 创新 点 在 于 : 制 出基 于双 D P 构 的全 研 S 架 磁 铁 瞬 时 工 作 电流 可 达 3 A, 作 电 压 是 自主 足 球 人 运 动 控 制 系 统 , 系 统 采 用 主 0 工 该 4 0 因此 控制 电路采用工 作 电流 是I O 耐 从 双 DS 1V, O A, P架 构 的 方 式 共 同处 理 全 自主 足 球 压是 l 0 v 大功率I B 管做 为 电子 开关 。 O0 的 G T 挑 机 器 人 底 层 硬 件 信 息 , 效 的 解 决 了 单 个 有 D P 者 单 个控 制 芯 片导 致 电路 复杂 , S或 电路 + l V 40 可 靠性 降低 , 统 处 理 速 度 不 高 , 时 性 不 系 实 强 等缺 点 。 验 证 明 , 实 本文 研 制 的 运 动 控 制 系 统应 用 在 基 于 全 向移 动 平 台 的 足 球 机 器 人 上 , 分 发 挥 了 全 向移 动 平 台 的 优 势 , 充 使 得 机器人运动性能得到 很大的提高 。
足球机器人设计思路与制作

⾜球机器⼈设计思路与制作⼀、机器⼈⾜球使⽤器材⾜球运动作为⼀项体育竞技项⽬,完美地体现着⼈类追求配合、协作、体能、竞争……揭⽰着⼈类对于美的追求。
正是因为它独特的魅⼒,才能如此长久地⿎舞⼈们的热情,让你哭、让你笑,让你激动,让你为之疯狂,让你欲罢不能……机器⼈⾜球是以⾜球为载体的前沿⾼科技研究和⾼技术对抗,它⼴泛涉及⼈⼯智能、计算机视觉、⾃动控制、精密仪器、传感和信息等⼀系列学科的创新研究,其研究成果可⼴泛应⽤于⼯业、农业、军事、信息技术等实际领域,集中反映出⼀个国家的⾼科技⽔平和综合国⼒。
⽬前教育部,中国科协,关⼼下⼀代委员会等多个政府部门开展的机器⼈活动都包括机器⼈⾜球项⽬。
但是,⽐赛机会少。
为了能让更多的学⽣参与这项有意义的活动。
西觅亚公司作为世界青少年机器⼈⾜球杯(ROBOCUP JUNIOR)的中国代表,希望提供给⼤家⼀个交流的机会,让机器⼈⾜球可以普及,从2004年3⽉开始进⾏机器⼈⾜球邀请赛,并且全国⽐赛选出的优胜队将会代表中国参加2004年在葡萄⽛举办的ROBOCUP JUNIOR总决赛。
1、机器⼈控制核⼼——RCX我们如何控制机器⼈的运⾏?乐⾼课堂⾥的机器⼈主要由微电脑——RCX来控制。
RCX有3路输⼊、3路输出可以连接各种传感器和马达等输⼊、输出设备。
RCX可以保存5个独⽴的应⽤程序,通常,其中3个是供⽤户使⽤的。
需要时,可以将5个独⽴程序都给⽤户使⽤,这需要在“Administrator”中通过点击“RCX Settings”,将RCX的1、2程序解锁。
RCX的操作系统是⾯向事件(event-oriented)的,可以并⾏处理10个任务。
事实上,我们不仅可以⽤RoboLab软件来为RCX编写程序,还可以做其他选择,例如NQC(Not Quiet C )。
利⽤ActiveX控件,你可以使⽤Visual Basic,Visual C++,Delphi等多达30多种正式、⾮正式语⾔为RCX编写程序。
FIRA机器人足球仿真策略技术报告

•引言•FIRA机器人足球仿真系统概述•机器人足球策略技术研究•仿真实验及结果分析•FIRA机器人足球仿真策略优化建议目•结论与展望•参考文献录Fira是一个机器人足球比赛的仿真平台,用于模拟和测试各种足球策略技术。
随着人工智能和机器人技术的快速发展,Fira成为了研究和学习机器人足球策略的重要工具。
背景介绍VS研究目的与意义目的意义研究内容与方法研究内容本报告将介绍Fira机器人足球仿真平台的基本原理和各种策略技术,包括进攻、防守、传球、射门等。
方法本研究将采用理论分析和实验验证相结合的方法,对Fira机器人足球仿真平台中的各种策略技术进行深入研究和测试。
FIRA机器人足球仿真系统简介FIRA机器人足球仿真系统架构2. 机器人模拟1. 比赛场景模拟4. 数据收集与分析3. 比赛规则模拟该部分主要负责模拟机器人足球比赛的规则,包括比赛时间、犯规判FIRA机器人足球仿真关键技术1. 3D图形渲染使用3D图形技术渲染比赛场景和机器人模型,以提供更加真实的视觉体验。
2. 物理引擎使用物理引擎模拟机器人的运动和碰撞,以提供更加真实的比赛效果。
3. 人工智能算法使用人工智能算法模拟机器人的决策和行为,以提供更加智能的机器人行为。
4. 机器学习技术使用机器学习技术自动化调整策略和算法,以提供更加高效的比赛表现。
进攻策略研究030201防守策略研究人盯人防守区域盯人防守全场紧逼通过短传和跑动,将球带向对方球门。
短传控球通过长传将球转移到对方防线的弱点,寻找进攻机会。
长传转移利用盘带技巧,突破对方防线,制造进攻机会。
盘带突破控球策略研究实验设定与条件仿真环境Fira机器人足球仿真环境,包括球场、机器人模型、物理引擎等。
机器人模型基于开源机器人模型进行修改,具有高度逼真度和精细的运动学性能。
传感器与感知采用红外传感器和超声传感器,获取球场信息,实现目标识别和定位。
通信与决策基于Zigbee无线通信技术,实现机器人之间的信息交互和协同决策。
机器人足球比赛系统设计与实现
机器人足球比赛系统设计与实现机器人足球比赛是一项由各国高校生产的项目,旨在通过设计和制造参与比赛的小型机器人,提高学生们的机械设计和编程技能,同时也有利于促进国际交流。
本文将从机器人设计、调试、通信、算法等方面,介绍机器人足球比赛系统的构建过程。
一、机器人设计机器人设计是机器人足球比赛的“起点”。
设计师需要有全面的机械设计和电子技术知识,包括机身结构、传感器使用和控制算法等。
机身结构的设计用来保证机器人能够在预定的场地内正常使用。
机器人需要有肢体和轮子,以便在场地上移动,并携带所需的传感器、电池和通信设备。
传感器是机器人足球比赛中非常重要的组成部分,可以让机器人感知场地、球和对手的位置。
常用的传感器有红外线、超声波、相机等。
通过处理传感器收集的数据,机器人就可以做出响应和决策。
除此之外,机器人还需要一定的通信设备,方便和其它机器人进行通讯和协作。
常用的通信设备有蓝牙、Wi-Fi等无线设备,也有信号传输较为稳定的有线设备。
二、调试当机器人设计完成后,需要进行调试才能够运作。
调试是机器人足球比赛的要点,可以确保机器人在比赛时顺利运行。
首先,需要检查机器人的电路、电机是否连接正常,各个传感器计算数据是否准确。
这一步是重点和基础,如果出现问题,机器人将无法正常运行。
其次,需要测试机器人与其它机器人的通讯机制,同时在不同环境下测试机器人对于灯光、声音、障碍等方面的反应。
最后,需要利用场地模拟比赛,并对机器人的运动进行优化,确保机器人有足够的速度和敏锐的反应速度。
三、通信机器人足球比赛的灵魂之一就是通信。
在比赛中,机器人之间的通信可以让他们共同制定策略,并参加足球比赛。
一般来说,机器人与基站没有直接的连接,其通过无线网络和其它机器人进行通讯。
通信的方式有许多种,包括 ZigBee、无线局域网、蓝牙等。
不同的通信方式具有不同的优点和缺点。
比如,ZigBee通信路径较远,并且具有低耗能,但不适合实时应用;而无线局域网的优点是通讯速度快,但需要相对的大量电力。
基于人工智能的智能机器人足球比赛策略研究

基于人工智能的智能机器人足球比赛策略研究近年来,随着人工智能技术的快速发展,智能机器人足球比赛成为科技与体育的完美结合之一。
通过人工智能技术,机器人能够模拟人类的感知、决策和行动能力,为足球比赛注入了新的活力和挑战。
本文将基于人工智能技术,深入研究智能机器人足球比赛的策略,并对其进行探讨和分析。
智能机器人足球比赛的策略研究可以从多个角度进行,如进攻、防守、战术安排等。
其中,进攻策略是智能机器人足球比赛中最重要的因素之一。
智能机器人足球队需要能够准确评估对手的防守水平和弱点,寻找到进攻的突破口,通过传球和配合实现进攻目标。
在研究进攻策略时,可以采用深度学习和强化学习等人工智能技术,通过大量的训练数据和优化算法,提高机器人足球队的进攻能力和效果。
除了进攻策略,防守策略也是智能机器人足球比赛中至关重要的一环。
智能机器人足球队需要能够迅速判断对手的进攻意图和动作,采取适当的防守策略进行干扰和封堵。
在研究防守策略时,可以利用计算机视觉和深度学习等技术,实时分析比赛画面和球员动作,通过智能机器人足球队的协同作战,提高防守效果和反击机会,增加胜利的可能性。
此外,战术安排也是智能机器人足球比赛中的关键因素之一。
战术安排需要综合考虑球队的整体实力、对手的特点、比赛环境等多种因素,制定出合理的战术方案。
在研究战术安排时,可以借助数据分析和模拟仿真技术,通过大量的实验和仿真测试,找出最佳的战术组合,并进行实时调整和优化。
通过智能机器人足球队的整体战术配合和个体技能发挥,提高比赛的胜率和娱乐性。
此外,智能机器人足球比赛策略的研究还可以从其他方面展开。
例如,提高机器人足球队的感知能力,使其能够更准确地感知场上的比赛局势和对手的动作。
还可以研究如何进行集体智能决策,使机器人足球队能够在复杂的比赛环境中做出快速而正确的决策。
此外,还可以通过机器学习和模仿学习等技术,提高机器人足球队的个体技能和团队配合能力。
总之,智能机器人足球比赛策略的研究是一个复杂而有挑战性的课题。
基于ARM9的足球机器人底层控制系统的设计

作 者 简 介 : 小光 (9 3 ) 男 , 南 商 水 人 , 教 , 职研 究 生 , 要 从 事 信 号 与 信 息 处理 . 李 18一 , 河 助 在 主
5 8
周 口师 范学 院学报
将 1 转换 为 5V 电压. 2V 2 5 复位 电路设 计 .
21 0 0年 9月
台. 参加 “ 界杯 ” 器人 足球 比赛 的球 队都 是体 凡 世 机
表 自己 国家 的综 合 实 力 参 加 比赛 的 , 因此 可 以说 “ 世界 杯 ” 机器 人 足球 比赛 是 衡 量 各 国综 合 技 术 实
力一个 小平 台上 的“ 术 战争 ” 技 .
传感 器 ; 此外 还 采用 了 可扩展 无 线通 信模 块 和视频 采集 模块 . 整体 设 计方 案见 图 1 其 .
李 小 光 , 茜琼 吴
( 阳理 工 学院 电气工程 与 自动化 系 , 南 洛 阳 4 1 0 ) 洛 河 7 0 3
摘 要 : 计 了一 种 基 于 3 设 2位 ARM 处 理 器 ¥ C 4 0和 嵌 入 操 作 系统 UC OS I的足 球 机 器人 底 层 控 制 系 3 24 / —I 统 . 点 介 绍 了 以 ¥ C 4 0为 核 心 的控 制 系统 组 成 , 于 I 2 重 324 基 M6 9的 位 置 闭 环 单 元 , 于 L 9 基 2 8的 功 率 放 大 模
¥ C 4 04 片作 为 主控 芯 片 , 3 24 [芯 电机 伺 服 控 制采 用 L 2 , 率 放大 采 用 L 9 , 安 装 有 红 外 、 力 M6 9 功 28又 压
比赛 为形 式 ,相 关 领 域 发 展 的 项 目 , 时它 机 同 也为 机器 人 硬 件 、 件 技 术 的研 究 提 供 了 广 阔平 软
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人足球系统的设计与控制研究
随着科技的不断进步,机器人已经不再是科幻电影中的角色,而是在现实生活
中得到了广泛的应用。
机器人足球系统作为机器人领域中有趣且挑战性的问题,越来越受到人们的关注。
机器人足球系统的设计和控制是研究者们需要克服的重要难题之一。
下面,我们将介绍机器人足球系统的设计与控制研究的相关内容。
一、机器人足球系统的基本组成
机器人足球系统是由若干个机器人和若干个球组成的。
其中,机器人是足球比
赛中的参赛队员,球则是比赛中的比赛器材。
机器人需要定位、导航、传球等功能,可以通过激光测距、摄像机系统、陀螺仪和加速计等传感器来完成任务,并通过执行器控制运动。
二、机器人足球系统的设计
机器人足球系统的设计要遵循一些基本原则,如机器人足球系统要做到轻巧、
便携、简单,并且无需进行人工干预。
同时,机器人足球系统还应该具有高度自主性,可以通过传感器来感知周围环境,并且可以自行决定下一步操作。
在机器人足球系统设计中,还需要考虑如何实现机器人之间的协作和配合,以实现更好的球队整体性能。
在机器人足球的设计中,要注意漏洞的问题,防止机器人足球系统遭到其他人的攻击。
三、机器人足球系统的控制研究
机器人足球系统的控制研究是机器人足球系统设计中的重要部分。
在控制研究中,要考虑如何实现机器人足球系统的自适应和智能化。
要实现其自适应性,可以通过负反馈控制、模糊控制和神经网络控制等技术来实现。
同时,在实现机器人足球系统的自主性的过程中,还可以使用模型预测控制、自适应控制等技术,利用已有的信息和预测信息来对机器人足球系统进行控制。
四、机器人足球系统的应用
机器人足球系统的应用在未来领域中很广泛。
比如,在生产和娱乐领域中,机器人足球系统可以作为人员的代替品做工,同时还可以通过比赛的方式达到娱乐的效果。
此外,机器人足球系统还可以用于军事上,可以用于探测和搜救任务的自主化。
总之,机器人足球系统的设计与控制研究是机器人领域的重要组成部分。
随着科技的发展和创新,机器人足球系统将在未来的领域中为各行业带来更广泛的应用和更广阔的前景。