机器人足球比赛系统设计与实现
类人足球机器人控制系统的设计与实现

江 南 大 学 学 报 (自 然 科 学 版 )
J u n l f in n nUnv ri ( tr l c n eE i o ) o r a a g a iest Nau a i c dt n oJ y S e i
Vo . No 1 19 .
机 器人技 术 作 为信 息 技 术 和先 进 制 造 技术 的
典 型代表 和主要技 术 手段 , 已成 为世 界 各 国竞相 发 展 的技术 。 目前最 尖端 的机器 人 技术 是类 人 型 机器
以20 年 中 国机器 人大赛 暨 R bC p公开赛 为例 , 08 oo u
类人 组开展 的是 33比赛和 技术挑 战赛 , 间只有 4 v 期 只 队伍参加 了 比赛 。 中主要 介绍 实 验室 类 人 足球 文
中图分类 号 : P2 2 6 文献标识 码 : 文章编 号 :6 1—7 4 ( 0 0 0 T 4 . A 17 17 2 1 ) 1—0 5 0 6—0 5
De i n a d I p e e a i n o u a i o c r Ro o sg n m l m nt to f H m no d S c e b t
HU Jn d n i - o g, L U G o d n , CHEN Na —u I u -o g G n r i
( c ol f o m nct nadC nrl n ier g J n nnU ies y Wu i 112 hn ) Sh o o m u iai n ot g ei , i g a nvri , x 24 2 ,C ia C o oE n n a t
控制 系统是 机器人 设计 中最关 键 的一部 分 , 一
机器人足球系统的智能控制算法研究与优化

机器人足球系统的智能控制算法研究与优化引言:近年来,机器人技术的快速发展使得机器人足球系统成为学术界和工业界的研究热点。
机器人足球比赛是一个涉及多个机器人之间的协作与竞争的复杂系统,其中智能控制算法的研究与优化至关重要。
本文就机器人足球系统的智能控制算法进行探讨,旨在提高机器人足球系统的协作与竞技水平,推动机器人足球技术的进一步发展。
一、现有智能控制算法的研究1. 传统算法传统的机器人足球系统智能控制算法主要包括规则表、有限状态机和行为树等。
这些算法对某些场景下的机器人控制具有一定的效果,但在应对复杂的环境和任务时存在一定的局限性。
传统算法的问题在于其无法对环境的动态变化做出及时响应,缺乏适应性。
2. 机器学习算法近年来,机器学习算法在机器人足球系统的智能控制中得到了广泛应用。
这些算法通过学习和优化来提高机器人的决策能力和控制水平。
主要的机器学习算法包括神经网络、强化学习和遗传算法等。
这些算法通过不断迭代和学习,在大量数据的支持下可以取得较好的控制效果。
二、智能控制算法的优化方向1. 高效决策算法机器人足球系统在比赛中需要根据不同的场景做出高效的决策,因此,需要设计和优化高效的决策算法。
其中包括球队的整体策略、球员的个体策略以及对手行为的预测等。
通过综合考虑多个因素,采用最优的决策策略,可以提高机器人足球系统在比赛中的竞争力。
2. 协作算法在机器人足球系统中,多个机器人需要协作以实现共同的目标。
因此,设计有效的协作算法对于提高机器人足球系统的水平至关重要。
协作算法需要考虑机器人之间的通信、合作和调度等问题,以使所有机器人在比赛中形成良好的协作关系,增强球队的整体实力。
3. 自适应算法机器人足球系统需要在不同的环境和任务下运行,并且需要适应环境的变化。
因此,自适应算法的研究对于机器人足球系统的智能控制至关重要。
自适应算法可以根据不同的环境和任务,在运行过程中实时进行参数调整和决策优化,以提高机器人足球系统的鲁棒性和适应性。
RoboCup 机器人足球仿真比赛开发设计
RoboCup机器人足球仿真比赛开发设计* 郭叶军熊蓉吴铁军(浙江大学控制科学与工程学系工业控制技术国家重点实验室杭州 310027)E-mail: yjguo@摘要:机器人世界杯足球锦标赛(The Robot World Cup),简称RoboCup,通过提供一个标准任务来促进分布式人工智能、智能机器人技术及其相关领域的研究与发展。
本文在介绍RoboCup仿真环境的基础上,系统完整地介绍了客户端程序的开发设计流程,阐述了其中涉及到的一些主要问题和算法,最后简要综述目前国际上的典型高层算法结构。
关键词: RoboCup 机器人足球比赛多智能体系统随着计算机技术的发展,分布式人工智能中多智能体系统(MAS:Multi-agent System)的理论及应用研究已经成为人工智能研究的热点。
RoboCup1则是人工智能和机器人技术的一个集中体现,被认为是继深蓝战胜人类国际象棋冠军卡斯帕洛夫后的又一里程碑式挑战,目标是到2050年完全类人的机器人足球队能够战胜当时的人类足球冠军队伍。
RoboCup包括多种比赛方式,主要分为软件仿真比赛和实物系列的机器人足球比赛。
由于软件仿真比赛无需考虑实际的硬件复杂性,避免硬件实现的不足,可以集中于研究多智能体合作与对抗问题,因此,目前参加仿真组比赛的队伍数目最多。
本文的内容涉及RoboCup仿真比赛,系统地介绍了client程序开发设计完整流程,可以作为是开发完整的RoboCup仿真程序的入门指南。
1.RoboCup仿真比赛介绍2 RoboCup仿真比赛提供了一个完全分布式控制、实时异步多智能体的环境,通过这个平台,测试各种理论、算法和Agent体系结构,在实时异步、有噪声的对抗环境下,研究多智能体间的合作和对抗问题。
仿真比赛在一个标准的计算机环境内进行,采用Client/Server 方式,由RoboCup联合会提供Server系统rcsoccersim(版本8之前名为soccerserver),参赛队编写各自的客户端程序,模拟实际足球队员进行比赛。
足球机器人设计思路与制作

⾜球机器⼈设计思路与制作⼀、机器⼈⾜球使⽤器材⾜球运动作为⼀项体育竞技项⽬,完美地体现着⼈类追求配合、协作、体能、竞争……揭⽰着⼈类对于美的追求。
正是因为它独特的魅⼒,才能如此长久地⿎舞⼈们的热情,让你哭、让你笑,让你激动,让你为之疯狂,让你欲罢不能……机器⼈⾜球是以⾜球为载体的前沿⾼科技研究和⾼技术对抗,它⼴泛涉及⼈⼯智能、计算机视觉、⾃动控制、精密仪器、传感和信息等⼀系列学科的创新研究,其研究成果可⼴泛应⽤于⼯业、农业、军事、信息技术等实际领域,集中反映出⼀个国家的⾼科技⽔平和综合国⼒。
⽬前教育部,中国科协,关⼼下⼀代委员会等多个政府部门开展的机器⼈活动都包括机器⼈⾜球项⽬。
但是,⽐赛机会少。
为了能让更多的学⽣参与这项有意义的活动。
西觅亚公司作为世界青少年机器⼈⾜球杯(ROBOCUP JUNIOR)的中国代表,希望提供给⼤家⼀个交流的机会,让机器⼈⾜球可以普及,从2004年3⽉开始进⾏机器⼈⾜球邀请赛,并且全国⽐赛选出的优胜队将会代表中国参加2004年在葡萄⽛举办的ROBOCUP JUNIOR总决赛。
1、机器⼈控制核⼼——RCX我们如何控制机器⼈的运⾏?乐⾼课堂⾥的机器⼈主要由微电脑——RCX来控制。
RCX有3路输⼊、3路输出可以连接各种传感器和马达等输⼊、输出设备。
RCX可以保存5个独⽴的应⽤程序,通常,其中3个是供⽤户使⽤的。
需要时,可以将5个独⽴程序都给⽤户使⽤,这需要在“Administrator”中通过点击“RCX Settings”,将RCX的1、2程序解锁。
RCX的操作系统是⾯向事件(event-oriented)的,可以并⾏处理10个任务。
事实上,我们不仅可以⽤RoboLab软件来为RCX编写程序,还可以做其他选择,例如NQC(Not Quiet C )。
利⽤ActiveX控件,你可以使⽤Visual Basic,Visual C++,Delphi等多达30多种正式、⾮正式语⾔为RCX编写程序。
机器人足球Robocup仿真系统研究与程序设计
R b cp teR b t r u o ra n ) o ou ( oo Wo dC pT unmet 即机 h l
形 。荷 兰阿姆 斯特丹 大 学 U A Ti a v rer 队采 用 l n球
器人世界杯 足球锦 标 赛 。它 通过 提供 一 个标 准 任务 来促 进分布式 人工 智 能 、 能机 器人 技术 、 其 相关 智 及 领域 的研究与发 展 。Rbcp包 括 多种 比赛 方 式 , oou 主
B a s r es 队把 R b c p问题 看 成 部 分 可 观 察 ri t m r 球 no oo u
个 比 中, 赛 通过比赛平台自 带的自动裁判或者通过人
为 裁判来做一 些规 则 限制 , 以确 保 比赛 的顺 利进 行 。
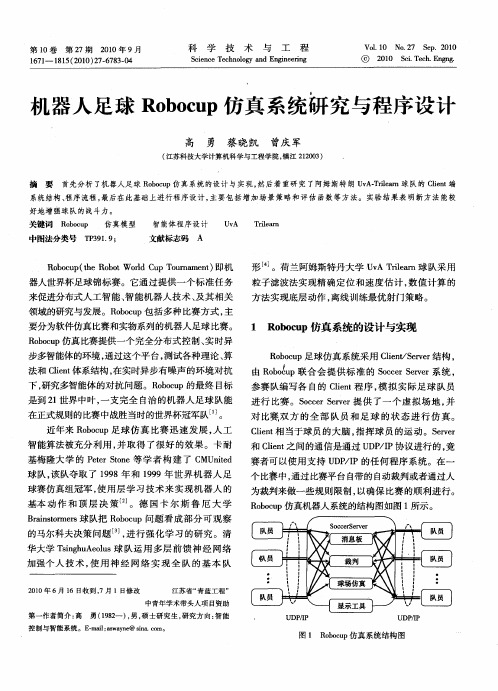
R b cp仿真 机器人 系统 的结构 图如 图 1 示 。 oou 所
进行 比赛 。Sce Sr r ocr e e 提供 了一个虚拟场地 , v 并 对比赛双方 的全部 队员 和足球 的状态 进行 仿真。
Ci t 当于球 员 的 大脑 , ln 相 e 指挥 球 员 的运 动 。Sre e r v 和 Cin 之 间的通信 是通 过 U P I l t e D /P协议 进行 的 , 竞 赛 者可 以使 用 支持 U P I D /P的任 何程 序 系 统 。在 一
第1 0卷
第2 7期
21 00年 9月
科
学
技
术
与
工
程
Vo. 0 N . 7 S p 01 1 1 o 2 e .2 0
17 一 1 1 ( 00 2 —7 30 6 l 8 5 2 1 )7 6 8 —4
S i n e Te h o o y a gne rn c e c c n lg nd En i ei g
机器人足球设计

void Defender_Right(Environment *env); void Defend1_Right(Environment *env); void Defend2_Right(Environment *env); void Defend_Right_py(Environment *env); 右队防守策略。入口参数:球员指针,环境参量。
机器人足球仿真比赛 课程设计
组 别:A 组 自动化 0409 班 组 员:程钊 012004014613
郝洵 012004014603 潘越 012004014604 王立 012004014626 指导老师:彭刚 提交时间:2005 年 11 月 13 日
机器人足球仿真课程设计
目
录
1. 需求分析
第9页
4.4 程序流程
机器人足球仿真课程设计
第 10 页
机器人足球仿真课程设计
4.5 函数说明 基本动作 void PredictBall ( Environment *env ); 预测球的位置,单步预测,运用微量调节。入口参数:环境参量。
void Velocity ( Robot *robot, double vl, double vr ); 将响应产生的机器人速度写入系统参量中,即引发机器人运动。入口参数:机器人 指针,左轮速度,右轮速度。
新加入的策略 void Kick( Environment *env, Robot *robot, double aim_angle ); 基本动作,绕到球后方,带球运动到对方球场。入口参数:环境参量,球员指针, 目标角度。
踢球机器人的设计与实现
踢球机器人的设计与实现一、介绍踢球机器人是一种可以自动辨别并截取足球的机器人系统。
随着科技的不断进步,踢球机器人的设计和实现愈加精密,并已经被广泛应用到各个领域。
本文将介绍踢球机器人的设计和实现,包括机器人的硬件设计、运动控制系统和图像处理系统等。
二、机器人的硬件设计一个完整的踢球机器人必须包含多个部件,包括结构和运动系统、传感器系统和电控系统。
首先,结构和运动系统是踢球机器人的核心部分。
机器人需要能够自由地移动以及迅速截取足球。
因此,机器人需要具备较好的机动性和运动控制能力。
通常,机器人需要包含轮子、电机、传动机构等基本部分,因此机器人的机身尺寸、轮胎的尺寸和数量、结构等都会影响机器人的性能。
根据实际需要,机器人主体的构造可以采用2轮或3轮的结构,也可以采用更多的轮子,但轮子的数量越多,越难保持平衡,所以需要更强大的控制机构。
其次,踢球机器人需要搭载一种传感器系统,这样机器人才能够获得周围环境的信息,如足球位置、光线、压力等。
这些信息十分重要,因为它们能够通过电控系统来得出机器人行动的决策,同时,还能精确地控制机器人的速度和方向。
最后,电控系统是踢球机器人的基本组成部分。
电控系统由一些微型电子零件和电路板等组成,这些器件能够控制各个执行机构的运动,确定机器人的行动轨迹,从而使机器人能够更精确地运动和响应。
同时,计算机编程技术也非常重要,它可以被用来指定机器人的行动规则,并将指令传递给执行机构。
三、运动控制系统对于一个踢球机器人的运动控制系统,包括机械结构和电控系统。
结构是运动系统的基础,因此机械的设计需要符合力学原理,在遇到外界力和力矩的情况下,能够保持稳定的姿势,这样才能保证机器人的速度和截取效果。
电控系统则需要根据机器人的运动状态来控制各种执行机构的运动。
运动控制系统需要有基于PID的闭环控制算法,这种算法依靠传感器反馈的数据来调整机器人运动方向和速度。
一个典型的运动控制系统可以包括控制卡,称为运动控制板(MCU),该板可以根据运动学和动力学模型执行启发式控制,并处理传感器的数据来实现控制目标。
机器人足球比赛规划与运动控制技术研究
机器人足球比赛规划与运动控制技术研究第一章机器人足球比赛概述机器人足球比赛是指由机器人组成的两支球队进行的足球比赛。
这种比赛通常被视为机器人控制和人工智能的理想测试平台,它是机器人技术和人工智能技术与足球运动的结合体,旨在展示机器人技术的发展水平和应用前景。
机器人足球比赛自20世纪90年代开始发展,目前已成为国际性比赛项目。
在机器人足球比赛中,机器人运动控制技术的研究和应用是关键。
第二章机器人足球比赛规则在机器人足球比赛中,球场大小为12x8米,场地平坦,无地形变化。
每队有6个球员机器人,包括1个守门员、2个后卫、2个中场和1个前锋。
比赛分为两个半场,每个半场15分钟。
如果有进球,球员机器人可以为所欲为,否则需要在指定的区域内移动。
比赛中,机器人之间不能出现人工干预,比赛结果由机器人自行决定。
第三章机器人足球比赛的技术难点机器人足球比赛的技术难点主要有以下几个方面:1.机器人的定位和控制:机器人在足球场上需要确定自己的位置和运动轨迹,并根据比赛规则自主决策。
因此,机器人足球比赛需要高精度的定位和控制技术。
2.机器人的协同控制:机器人需要在比赛中协同作战。
因此,需要将多个机器人的控制算法整合在一起,实现程序协同控制。
3.机器人的感知技术:机器人需要实时感知自身和对手的状态,以便做出最佳的决策。
因此,机器人足球比赛需要高效、可靠的感知技术。
第四章机器人足球比赛技术现状目前,机器人足球比赛的技术已经非常成熟。
机器人足球比赛的软硬件平台呈现出多样化的趋势,广泛运用于国内外高校、研究机构以及企业的机器人教育、研发和项目考核中。
常见的机器人足球比赛的软件平台有RoboCup2D和RoboCup3D,硬件平台主要有Nao智能机器人、完全自主的机器人自行设计制造等。
第五章机器人足球比赛的运动控制技术机器人足球比赛的运动控制技术包括底盘控制、运动规划、动力学仿真和运动控制等方面。
1.底盘控制:底盘控制主要是针对机器人的轮子或腿机构,实现其在平面上的运动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人足球比赛系统设计与实现
机器人足球比赛是一项由各国高校生产的项目,旨在通过设计
和制造参与比赛的小型机器人,提高学生们的机械设计和编程技能,同时也有利于促进国际交流。
本文将从机器人设计、调试、
通信、算法等方面,介绍机器人足球比赛系统的构建过程。
一、机器人设计
机器人设计是机器人足球比赛的“起点”。
设计师需要有全面的
机械设计和电子技术知识,包括机身结构、传感器使用和控制算
法等。
机身结构的设计用来保证机器人能够在预定的场地内正常使用。
机器人需要有肢体和轮子,以便在场地上移动,并携带所需的传
感器、电池和通信设备。
传感器是机器人足球比赛中非常重要的组成部分,可以让机器
人感知场地、球和对手的位置。
常用的传感器有红外线、超声波、相机等。
通过处理传感器收集的数据,机器人就可以做出响应和
决策。
除此之外,机器人还需要一定的通信设备,方便和其它机器人
进行通讯和协作。
常用的通信设备有蓝牙、Wi-Fi等无线设备,也
有信号传输较为稳定的有线设备。
二、调试
当机器人设计完成后,需要进行调试才能够运作。
调试是机器人足球比赛的要点,可以确保机器人在比赛时顺利运行。
首先,需要检查机器人的电路、电机是否连接正常,各个传感器计算数据是否准确。
这一步是重点和基础,如果出现问题,机器人将无法正常运行。
其次,需要测试机器人与其它机器人的通讯机制,同时在不同环境下测试机器人对于灯光、声音、障碍等方面的反应。
最后,需要利用场地模拟比赛,并对机器人的运动进行优化,确保机器人有足够的速度和敏锐的反应速度。
三、通信
机器人足球比赛的灵魂之一就是通信。
在比赛中,机器人之间的通信可以让他们共同制定策略,并参加足球比赛。
一般来说,机器人与基站没有直接的连接,其通过无线网络和其它机器人进行通讯。
通信的方式有许多种,包括 ZigBee、无线局域网、蓝牙等。
不同的通信方式具有不同的优点和缺点。
比如,ZigBee通信路径较远,并且具有低耗能,但不适合实时应用;而无线局域网的优点是通讯速度快,但需要相对的大量电力。
通信的另一个问题就是
如何保证通讯的可靠性。
在机器人足球比赛中,必须保证通讯的
时序性和准确性,所以,通信的特殊算法需要被应用到系统之中。
四、算法
机器人足球比赛的算法非常重要,决定了它们在比赛中的表现。
算法是机器人运行和交流的核心,算法可以迅速解决问题并决定
机器人的下一步行动。
如何设计算法,以控制机器人呢?这需要工程师掌握如下知识:
1.机器人位置的精确掌握,需要机器人配备GPS或者被动的传
感器,如加速度计或激光跟踪器。
2.了解其他机器人和球的位置,以提高战斗经验。
3.研究算法的质量,包括算法的准确性和响应速度,还需要考
虑算法的稳定性和可扩展性,确保在足球比赛中没有意外。
算法的设计在机器人足球比赛中占据了很大的比重,需要制定
一个包括所有通讯和动作的优化方案。
算法的持续改进和适应不
同场合的能力是机器人足球比赛系统的重要组成部分。
总结
机器人足球比赛是相当复杂的系统,需要许多领域的知识和技能。
本文介绍了足球机器人的设计、调试、通信和算法等方面,
希望读者能够对机器人足球比赛系统的构建有一定的认识,从而为参与这一领域的活动提供指导和帮助。