高斯牛顿迭代
梯度下降 高斯牛顿
梯度下降和高斯牛顿是机器学习和优化领域常用的两种优化方法。
梯度下降是一种常用的一阶优化算法,可以用于求解目标函数的最小值。
它通过计算目标函数在当前参数下的梯度(即指向最大增长方向的向量)并沿着梯度的反方向迭代更新参数,直到收敛达到最小值。
高斯牛顿法是一种基于牛顿法的优化算法,利用目标函数的一阶和二阶导数信息来更快地寻找最小值。
它通过计算目标函数在当前参数下的梯度和海森矩阵(即二阶导数)来更新参数,直到收敛达到最小值。
相比于梯度下降,高斯牛顿法通常更快地收敛,但要求目标函数的二阶导数可计算和海森矩阵可逆。
在实际应用中,梯度下降通常适用于目标函数的梯度容易计算的场合,而高斯牛顿法则适用于目标函数参数较少、目标函数相对平滑、并且具有较快的收敛速度的场合。
高斯牛顿法求解非线性问题

高斯牛顿法求解非线性问题在科学研究、工程设计等领域中,有许多问题都可以归纳为非线性问题,例如曲线拟合、最小二乘法拟合、非线性规划等。
如何高效地求解这些问题是一个重要的课题。
高斯牛顿法(Gauss-Newton method)是一种常用的优化算法,被广泛应用于求解非线性问题。
高斯牛顿法的基本思想是:将非线性问题转化为最小二乘问题,然后使用线性最小二乘法求解。
具体而言,假设有一个由m个参数和n个数据点组成的非线性模型:f(x) = (f1(x),f2(x),...,fn(x))^T其中,x = (x1,x2,...,xm)^T 为参数向量,fi(x)为第i个观测值。
若将f(x)看作一个向量函数,则该函数在x处的导数可以用雅可比矩阵来表示:J(x) = [∂f1(x)/∂x1,∂f1(x)/∂x2,...,∂f1(x)/∂xm;∂f2(x)/∂x1,∂f2(x)/∂x2,...,∂f2(x)/∂xm;.............................∂fn(x)/∂x1,∂fn(x)/∂x2,...,∂fn(x)/∂xm]雅可比矩阵是一个n×m的矩阵,表示参数向量对向量函数的导数。
对于非线性模型,其导数难以直接求解,因此需要采用近似方法。
高斯牛顿法采用的是一阶泰勒展开式,将非线性模型在x 处展开:f(x+Δx) ≈ f(x) + J(x)Δx其中,Δx为参数向量x的增量,即x+Δx为新的参数向量。
将上式两边平方,再加上一个权重矩阵W,得到最小二乘问题:min Δx ||sqrt(W)(f(x+Δx)-f(x))||^2上式中,||·||表示向量的欧几里得长度,W为一个n×n的对角矩阵,其作用是赋予不同观测值不同的权重。
将上式展开,得到:min Δx (f(x)+J(x)Δx-y)^TW(f(x)+J(x)Δx-y)其中,y为n×1的向量,表示原始数据点。
基于高斯-牛顿迭代的三星时差定位融合算法

明 其 算 法 可 提 高 整 个 定 位 系 统 的 定 位 精 度 。 许 丞 梁 [5]
位可以提高定位精度并节省增加卫星数量的成本。
将 到 达 时 间 差 和 到 达 频 率 差(FDOA)、到 达 角
收稿日期:2020‒07‒26;2020‒08‒19 修回。
作 者 简 介 : 徐 英 杰(1995-),男 ,硕 士 研 究 生 ,主 要 研 究 方 向 为 无
·技术前沿·
航天电子对抗
2020 年第 5 期
基于高斯-牛顿迭代的三星时差定位融合算法
徐英杰,郭福成
(国防科技大学电子科学学院,湖南 长沙 410000)
摘 要 : 若 三 星 时 差(TDOA)定 位 系 统 可 多 次 接 收 到 辐 射 源 信 号 并 进 行 定 位 ,则 通 过 不
同时刻观测的多组时差和高程信息融合可能可以提高定位精度。将先验高程信息建模为三
基于高斯牛顿迭代的三星时差定位融合算法2020365????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????4结束语本文提出了一种在卫星位置不确定的情况下三星基于多次观测的时差和高程信息融合定位算法并与目前工程上现有的位置合批处理方法进行了比较实验仿真证明本文提出的算法定位精度优于现有的位置合批处理方法
Key words:satellite;time-difference-of-arrival(TDOA);location;fusion
pytorch 高斯牛顿算法-概述说明以及解释
pytorch 高斯牛顿算法-概述说明以及解释1.引言1.1 概述概述高斯牛顿算法是一种优化算法,它结合了牛顿法和梯度下降法的优点,旨在更快地收敛到目标函数的极小值点。
在机器学习和深度学习领域中,优化算法的选择对模型的性能起着至关重要的作用。
PyTorch作为一种流行的深度学习框架,为我们提供了丰富的优化算法实现,其中也包括了高斯牛顿算法。
本文将介绍高斯牛顿算法的原理和在PyTorch中的应用,以及对其优缺点进行分析,旨在帮助读者更好地理解和应用高斯牛顿算法。
文章结构部分的内容如下:1.2 文章结构本文将分为三个部分来讨论高斯牛顿算法在PyTorch中的应用。
首先,在引言部分将介绍高斯牛顿算法的概念和目的,以及本文的写作动机。
然后在正文部分将详细介绍高斯牛顿算法的原理和PyTorch中的实际应用情况。
最后,在结论部分将对算法的优缺点进行分析,并展望其在未来的应用前景。
希望通过本文的分析和讨论,读者能更好地理解高斯牛顿算法在深度学习领域的价值和意义。
1.3 目的本文旨在介绍高斯牛顿算法在优化问题中的应用,并探讨其在PyTorch中的实现和优缺点分析。
通过深入了解高斯牛顿算法的原理和特点,读者可以更好地理解该算法在解决复杂优化问题中的作用和效果。
同时,本文还将展望高斯牛顿算法在未来的应用前景,为读者提供有益的参考和启发。
通过本文的阅读,读者将能够更好地掌握高斯牛顿算法的概念和应用,进而在实际项目中灵活运用该算法,提高优化效率和精度。
2.正文2.1 高斯牛顿算法介绍高斯牛顿算法是一种优化算法,用于求解非线性最小二乘问题。
它是基于牛顿法的一种改进方法,通过利用二阶导数信息来更快地收敛到最优点。
与传统的梯度下降方法相比,高斯牛顿算法在某些情况下可以更快地收敛并且更稳定。
在高斯牛顿算法中,每一次迭代都需要计算目标函数的梯度和海塞矩阵(即目标函数的二阶导数)。
然后利用这些信息来更新当前的参数值,使目标函数的值不断减小直至收敛于最优解。
lm算法牛顿法

lm算法牛顿法牛顿法和高斯-牛顿法都是最优化算法,它们通过多轮迭代逐步逼近最优解。
而LM 算法(Levenberg-Marquardt算法)是这两种算法的一种改进,旨在解决高斯-牛顿法在矩阵非正定时可能出现的问题。
以下是对这三种算法的简要介绍:1.牛顿法:牛顿法是一种在实数域和复数域上近似求解方程的方法。
它使用函数f 的泰勒级数的前面几项来寻找方程f(x)=0的根。
牛顿法可以被用来找寻函数的最大值或最小值,这需要将函数的一阶导数设为零并求解,或者将函数的二阶导数设为零并求解以寻找拐点。
牛顿法在求解非线性最优化问题时也非常有效,特别是当问题的局部最优解是全局最优解时。
然而,当问题的维数增加时,计算二阶导数(即Hessian矩阵)可能会变得非常复杂和耗时。
2.高斯-牛顿法:高斯-牛顿法是牛顿法的一个变种,它专门用于求解非线性最小二乘问题。
在每一步迭代中,它使用雅可比矩阵(而不是Hessian矩阵)来逼近函数的Hessian矩阵,从而避免了直接计算二阶导数。
然而,高斯-牛顿法的收敛性依赖于初始值的选取和问题的性质。
如果初始值选取不当或者问题存在多个解,那么高斯-牛顿法可能会收敛到错误的解或者根本不收敛。
3.LM算法:LM算法是结合了梯度下降法和高斯-牛顿法的一种优化算法。
它通过引入一个阻尼因子来调整迭代步长,从而在高斯-牛顿法的基础上增加了算法的稳健性。
当阻尼因子较大时,LM算法更接近于梯度下降法,具有全局收敛性;当阻尼因子较小时,LM算法更接近于高斯-牛顿法,具有快速局部收敛性。
因此,LM算法可以在一定程度上解决高斯-牛顿法在矩阵非正定时出现的问题。
总的来说,这三种算法都是用于求解最优化问题的重要工具,它们各有优缺点并适用于不同类型的问题。
在实际应用中,需要根据问题的性质和需求选择合适的算法进行求解。
牛顿迭代法的函数逼近和拟合

牛顿迭代法的函数逼近和拟合在数学和计算机科学中,函数逼近(function approximation)和拟合(function fitting)是重要的问题之一,它们涉及到如何用已知数据或函数来找出与之近似的函数形式。
而牛顿迭代法是一种常用的数值计算方法,可以被广泛地应用在函数逼近和拟合中。
一、牛顿迭代法简介牛顿迭代法是一种求解方程的方法,其本质是一种迭代算法,可以通过给出一个函数在某点的值以及该点的导数,迭代地求出函数的零点或者极值点。
其基本公式为:$$x_{n+1}=x_n-\frac{f(x_n)}{f'(x_n)}$$其中,$f(x_n)$表示函数在点$x_n$处的函数值,$f'(x_n)$表示函数在点$x_n$处的导数,$x_{n+1}$是通过迭代算法得到的新的近似解。
在使用牛顿迭代法时,需要注意函数的光滑性和局部收敛性,如果函数不光滑或者在某些点处导数为零,那么迭代可能会导致发散或者收敛速度极慢。
二、牛顿迭代法在函数逼近中的应用在函数逼近中,如果我们已知一些数据点$(x_i, y_i)$,并且想要找到一个函数$f(x)$,可以用这些数据点来拟合函数,那么可以使用牛顿迭代法来实现。
具体的方法如下:1.首先定义一个函数$g(x)$,它满足$g(x_i)=y_i$;2.然后利用牛顿迭代公式,给出$f(x)$的递归式:$$f(x_{n+1})=f(x_n)+\frac{g(x_n)-f(x_n)}{g'(x_n)}$$其中,$g(x)$是一个在点$(x_i, y_i)$处值为$y_i$,在其他点处为零的光滑函数。
3.重复进行上述迭代,直到得到一个满足精度要求的近似解。
通过牛顿迭代法的函数逼近方法,我们可以得到在数据点上的逼近函数,这个函数可以用来进行插值和外推等操作,同时也可以作为一个简单的近似模型来使用。
三、牛顿迭代法在函数拟合中的应用除了函数逼近,牛顿迭代法还可以用于函数拟合,这里的函数拟合指的是通过一些给定的函数基,将一个在某些点处已知函数值的函数表示为基函数线性组合的形式。
高斯牛顿迭代(GaussNewton)代码实现
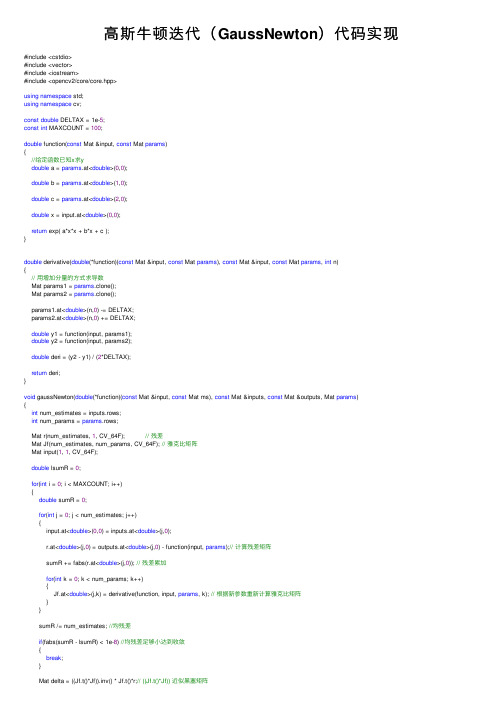
⾼斯⽜顿迭代(GaussNewton)代码实现#include <cstdio>#include <vector>#include <iostream>#include <opencv2/core/core.hpp>using namespace std;using namespace cv;const double DELTAX = 1e-5;const int MAXCOUNT = 100;double function(const Mat &input, const Mat params){//给定函数已知x求ydouble a = params.at<double>(0,0);double b = params.at<double>(1,0);double c = params.at<double>(2,0);double x = input.at<double>(0,0);return exp( a*x*x + b*x + c );}double derivative(double(*function)(const Mat &input, const Mat params), const Mat &input, const Mat params, int n){// ⽤增加分量的⽅式求导数Mat params1 = params.clone();Mat params2 = params.clone();params1.at<double>(n,0) -= DELTAX;params2.at<double>(n,0) += DELTAX;double y1 = function(input, params1);double y2 = function(input, params2);double deri = (y2 - y1) / (2*DELTAX);return deri;}void gaussNewton(double(*function)(const Mat &input, const Mat ms), const Mat &inputs, const Mat &outputs, Mat params){int num_estimates = inputs.rows;int num_params = params.rows;Mat r(num_estimates, 1, CV_64F); // 残差Mat Jf(num_estimates, num_params, CV_64F); // 雅克⽐矩阵Mat input(1, 1, CV_64F);double lsumR = 0;for(int i = 0; i < MAXCOUNT; i++){double sumR = 0;for(int j = 0; j < num_estimates; j++){input.at<double>(0,0) = inputs.at<double>(j,0);r.at<double>(j,0) = outputs.at<double>(j,0) - function(input, params);// 计算残差矩阵sumR += fabs(r.at<double>(j,0)); // 残差累加for(int k = 0; k < num_params; k++){Jf.at<double>(j,k) = derivative(function, input, params, k); // 根据新参数重新计算雅克⽐矩阵}}sumR /= num_estimates; //均残差if(fabs(sumR - lsumR) < 1e-8) //均残差⾜够⼩达到收敛{break;}Mat delta = ((Jf.t()*Jf)).inv() * Jf.t()*r;// ((Jf.t()*Jf)) 近似⿊塞矩阵params += delta;lsumR = sumR;}}int main(){// F = exp ( a*x*x + b*x + c )int num_params = 3;Mat params(num_params, 1, CV_64F);//abc参数的实际值params.at<double>(0,0) = 1.0; //aparams.at<double>(1,0) = 2.0; //bparams.at<double>(2,0) = 1.0; //ccout<<"real("<<"a:"<< params.at<double>(0,0) <<" b:"<< params.at<double>(1,0) << " c:"<< params.at<double>(2,0) << ")"<< endl; int N = 100;double w_sigma = 1.0; // 噪声Sigma值cv::RNG rng; // OpenCV随机数产⽣器Mat estimate_x(N, 1, CV_64F);Mat estimate_y(N, 1, CV_64F);for ( int i = 0; i < N; i++ ){double x = i/100.0;estimate_x.at<double>(i,0) = x;Mat paramX(1, 1, CV_64F);paramX.at<double>(0,0) = x;estimate_y.at<double>(i,0) = function(paramX, params) + rng.gaussian ( w_sigma );}//abc参数的初值params.at<double>(0,0) = 0; //aparams.at<double>(1,0) = 0; //bparams.at<double>(2,0) = 0; //ccout<<"init("<<"a:"<< params.at<double>(0,0) <<" b:"<< params.at<double>(1,0) << " c:"<< params.at<double>(2,0) << ")"<< endl; gaussNewton(function, estimate_x, estimate_y, params);cout<<"result("<<"a:"<< params.at<double>(0,0) <<" b:"<< params.at<double>(1,0) << " c:"<< params.at<double>(2,0) << ")"<< endl; return0;}# Project: GaussNewtonDemo## All rights reserved.cmake_minimum_required( VERSION 2.6 )cmake_policy( SET CMP0004 OLD )### initialize project ###########################################################################################SET(CMAKE_BUILD_TYPE "Debug")SET(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g2 -ggdb")SET(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")project(GaussNewtonDemo)find_package(Eigen3 REQUIRED)find_package(OpenCV REQUIRED)set(CMAKE_INSTALL_PREFIX /usr)set(BUILD_SHARED_LIBS on)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fPIC -O0")include_directories(${EIGEN3_INCLUDE_DIR}${OpenCV_INCLUDE_DIR})add_definitions( "-DPREFIX=\"${CMAKE_INSTALL_PREFIX}\"" )### global default options #######################################################################################set(SOURCESmain.cpp)add_executable(GaussNewtonDemo ${SOURCES}) TARGET_LINK_LIBRARIES( GaussNewtonDemo ${OpenCV_LIBS} )。
高斯法和牛顿法
缺点: 本算法的主要缺点是收敛速度很慢。 病态条件系统,计算往往会发生收敛困难 节点间相位角差很大的重负荷系统; 包含有负电抗支路(如某些三绕组变压器或线路串联电 容等)的系统; 具有较长的辐射形线路的系统; 长线路与短线路接在同一节点上,而且长短线路的长 度比值又很大的系统。
此外,平衡节点所在位置的不同选择,也会影响到收敛性能。 目前高斯一塞德尔法已很少使用
牛顿一拉夫逊法
牛顿一拉夫逊法(简称牛顿法)在数学上是求解非线性代数 方程式的有效方法。其要点是把非线性方程式的求解过程变 成反复地对相应的线性方程式进行求解的过程,即通常所称 的逐次线性化过程。
y
y f (x)
第k+1步 迭代
下一步 迭代
y(k)
x(k )
o
x x (k 2) (k 1)
x(k)
x
PV节点 PQ节点
P1 H11
Q1
J11
QP22 Hn1
N 11 L11 N 21 L21 N p1
N n1
H12 J12 H 22 J 22 H p2
of Power Flow Pr-oblems.AIEE Trans,1956,75,III:398~404
该2参IP特参NN1参TP1R11最 1参E含tAA、、5erc、99eeoar法考点考考考8otwSSav优 直77na116nt--isit1411特文:文文文9~9o89vno9o66潮 流9年 年m23inmn6点献收献献献n123:(7’iges7年5年qP流 和, 和8t,::敛::9h13MuNo年o,9,~)ewodeP原性BTSIJ.F法F11wn.tA最e基ti:r0CA,D9honolr理好BaiSoICawL8tnnmA优于E8tdu-reeT保nF1简、85pEB.lpoyal潮阻6S9法 年eHEpt.r,单内onW:~i元留IaTtE流tE抗rySiSAr,、存,a18eaE.Fo,t件非数nrl矩46uE,sc.es内占49最Iast.T学aoE阵9Tc的线HaClan存用~E.rFnOm优a模ao的PEdrrn潮需量性Pn1.ou.ts型otwS4的r乘TCraw求大6FoyiEer的流bar0算ensaYEl子un较大rtAese.P.ttFs快计c法pim.o.l少增oDp法oPAwsnawe速算Po,r1、 加ecaaFAw潮9SrtoauM6lo算 (潮SuAe’ssl2re.p流utapa.法 限ttlFLyn流upieo1dl/doad8o收 制Jn9reaSu8w算La7bdyn(敛 解dty8osueSuFt.aI法es1性 题oml1dmDo0al99puwsFn)i差 规77es,tdldi(4poMo:模a1a,Swnnt59eycc.)b)6teshhyt3iMeoIn:,EmdgaEtsr,Eix 2参A1参T9参112参S3参参oP2参EiMf、、、、0095noohn、n考考考考考考考(187lwDrteRuaoE1111(17teCtth1ue文文文文文文文59999.~xiiroocog9)68799aCFtdnnh献献献献献献献)118462ca8lost:年年年年05nfooa.2no:::::::F:08gwfvM年r1,,,,(1auFI.eRSIDSBGs39ilEAilwrat最最交含274aunlart,oErI-LCeNsa64)anioEcmmECsrum优优直F~1oTooEDPTn包am:~aoainTSonzEnaad潮潮流c1oSdterIagrdtAD319ora,il括sFaTtdetN流流潮278ni元TnieHlSolriMo631soeanavtrnD,.二on的计流86tawgn件aiW,ac,en~TetslATeePds简算计.Mn.的e,阶essmAaL,1dcPt.mei化的算aPh7Or潮SiTonMtaslA项Kn4uh.iI.wps,梯牛nPi3E流roStrtqVaeiniaodE1I的.ouRmr度顿efmw计Y9nEetGIyaSa6n1.Eep.Lo快法算ly算T8Wcr9rPqsPAol.Kr7IFAuitu法aEvone速6,FladnoSemwt8E.Lt.oisdiw7nE. Wooes,P潮(g9.ranNOrET5hdaPsFMSep1rc(流kyAIlewDaFtE0oasicnSVln)omsw1Etioos算or.aon)Ee.wnaFn,:mgbcld’1y:T法tsPCPiJPlN91OcryAeNLoaL8a87arrDlwoSin2ee6.dn6cnas.iw.i6uede~rs.darr~Ilaaptano1.T8FFNatJPcn91i8tell.Aloecoo7R8runwhmww1S7se.i.6t.psoornnes-
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、非线性回归法
(Method of nonlinear regression )
在药物动力学中,血药浓度与时间的关系常常不是直线而是曲线,符合指数函数或抛物线等,如一室模型静脉注射即属指数函数kt e C C -=0,通常转化为对数形式
0log 303
.2log C kt C +=
,以
log C 对t 进行线性回归求出k 值。
但此法不尽合理,因这是log C
与t 之间最小二乘,而不是C 与t 之间最小二乘。
故提出非线性回归法,此法所得结果更为准确,但其计算复杂,工作量大,必须采用电子计算机才能完成运算。
非线性回归一般采用高斯-牛顿(Gauss-Newton )迭代法。
迭代法是用某个固定公式反复地计算,用以校正方程所得根的近似值,使之逐步精确化,最后得到的精度要求的结果。
一般非线性参数的确定,通常采用逐次逼近的方法,即逐次“线性化”的方法。
设某药在体内的模型中待定参数a 1,a 2,a 3,…,a m ,求得隔室中药时关系的函数式为:
C = f (t ,a 1,a 2,a 3,…,a m )
其中t 是单个变量,t = ( t 1,t 2,t 3,…,t n ),今有n 组实验观测值(t k ,C k )k = 1,2,…n ,在最小二乘意义下确定m 个参数a 1,a 2,a 3,…,a m 。
下面介绍一般解法。
1.先给a i (i = 1,2,…m )一个初始值,记为)0(i a ,并记初值与真值之差i ∆(未知),这时有
i
i
i a a ∆+=)
0(
若知i ∆则可求a i ,在)
0(i
a 附近作Taylor 级数展开并略去i ∆的二次以上各项得
f (t k ,a 1,a 2,…,a m )m m
k k k k a f a f a f f ∆∂∂+
+∆∂∂+
∆∂∂+
≈022
011
00
式中),,,,()0()0(2)0(10m k k a a a t f f =
)
0()
0(1
121)
,,,(m m k
i
m i
ko a a a a t t a a a a t f a f ===∂∂=
∂∂
当)
0(i
a 给定时,0k f ,
i
ko a f ∂∂均可由t 算得。
2.列出正规方程(线性方程组),若参数为4个即m = 4,则应列出以下方程
4
444343242141343433323213124243232221211414313212111B b b b b B b b b b B b b b b B b b b b =∆+∆+∆+∆=∆+∆+∆+∆=∆+∆+∆+∆=∆+∆+∆+∆
各方程前面的系数),,2,1,(m j i b ij =和B i 可以用以下公式求出
∑
=∂∂∂∂=⋅
n
k j
k i
k ij a
f a f b 1
00
∑
=-∂∂=n
k k k i
k i f C a f B 1
00)(
上述方程组,用高斯消元法求解i ∆,继而算出i a 值。
3.将算得之i a 作为初值,重复上述步骤1,2,反复迭代和修正直至|i ∆|小于允许误差或符合残差平方和的要求。
残差平方和也是检查计算是否达到要求的重要指标,残差平方和
∑=-=n
k k m k C a a a t f 1
2
21]
),,,([SUM
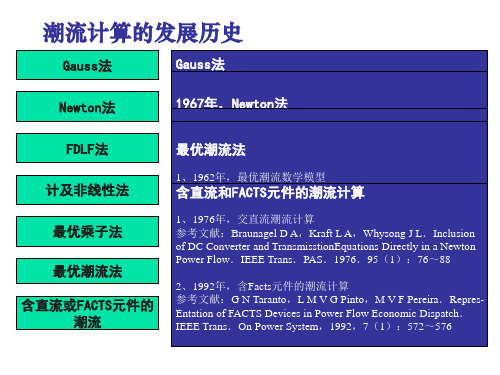
上述迭代手续,解方程组,工作量很大,若编制工作程序,用电子计算机就能很方便地完成。
计算程序框图如下:
上述高斯-牛顿迭代法对于初始值依赖高,常先用残数法求出初始值。
若初始值偏离真值太远,往往迭代数次后又发散,故现在又发展了Maquart 法和单纯形法。