ADS-B与雷达数据的融合应用
空管雷达和ADS-B数据预处理技术的研究

空管雷达和 ADS-B 数据预处理技术的研究摘要:雷达数据处理系统作为空管系统中的核心组成部分,受到了世界各国空管部门的高度重视。
ADS-B与雷达数据融合的目的,是要将ADS-B和不同雷达对同一目标的监视数据组合起来,建立每一个目标的系统航迹,以实现对目标更大范围、更高精度的监视,提高系统的可靠性,增加空域容量,从而提高飞行的安全性和空域的利用率。
本文研究了ADS-B和雷达数据融合之前首先要解决的关键问题——数据预处理。
针对ADS-B和雷达监视数据,数据预处理主要包括去野值、坐标变换、时间对准、系统误差配准和数据关联。
关键词:空管雷达、ADS-B、数据预处理1 引言预处理的目的是实时搜集ADS-B和各雷达送来的点迹或本地航迹数据,经过坐标变换、时间对准,变换成融合系统统一的时空参考系统,并进行必要的系统误差补偿,在统一的参考坐标系中进行点迹和航迹的数据关联,为后续数据融合做准备,减小数据融合的误差。
2 数据源预处理(去野值)数据丢失、错误输入和虚警将降低数据的完整性。
在数据融合之前,首先应该去掉那些在录取和传输过程中,由于受到干扰等原因所产生的一些不合理或者误差较大的,严重偏离大部分数据所呈现趋势的小部分数据点的数据,即野值。
野值对数据处理有极为不利的影响。
本文研究分布式数据融合方法,在进行数据融合之前,各单传感器都会进行滤波处理,这样利用卡尔曼滤波平滑测量信号中的噪音,消除劣质数据点,在丢失数据间滑行,提供目前最好的状态估计。
3 坐标变换坐标变换即数据的空间校准,就是把各传感器在不同坐标系下的观测数据变换到融合中心统一的参考坐标系下。
ADS-B和雷达数据来自不同的参考系,雷达产生的测量值是极坐标,是相对于雷达自身的距离、方位、高度等,;而ADS-B 产生的数据在WGS-84坐标系中的经度、纬度、高度。
为了进行数据融合,所有的数据必须转换到相同的坐标系和相同的单位。
目标的运动最好是在直角坐标系下描述,任何传感器坐标系下表示的测量在直角坐标系都有准确的表达。
S模式雷达和ADS-B在空管自动化系统的处理与应用

S模式雷达和 ADS-B在空管自动化系统的处理与应用【摘要】随着空管监视技术的不断发展。
监视源已不仅仅局限于传统雷达方式,ADS-B、S模式雷达等多监视源已经广泛应用于自动化系统中。
S模式雷达和ADS-B数据中,具备更多的数据项,可以为管制员提供更多航空器和机载设备信息。
本文详细描述了空管自动化系统对S模式雷达和ADS-B信号的处理机制,并分析和探讨了引入S模式雷达和ADS-B信号的优势,以及存在的问题和解决办法。
【关键字】S模式雷达;ADS-B;监视源;处理与应用一、广州区管S模式雷达和ADS-B使用情况2018年,我国参照国际民航组织航行实施规划发布了中国民航空管ADS-B及S模式雷达数据应用实施计划,开始推进ADS-B及S模式雷达数据在空管自动化中的应用。
目前广州区管已实现ADS-B全区域覆盖;广州区管共引接32部雷达,其中15部雷达为S模式雷达,已基本实现S模式雷达双重及以上覆盖。
广州区管也正在有计划推进S模式雷达的引接工作图1 广州区管S模式雷达覆盖情况二、空管自动化系统中S模式雷达和ADS-B处理介绍S模式雷达采用ASTERIXCAT034和ASTERIXCAT048传输协议,ADS-B采用ASTERIXCAT023和ASTERIXCAT021传输协议,当系统收到的S模式雷达和ADS-B报告时,分别按照相应传输协议进行解码,提取有效数据之后,通过预相关(pre-correlation)、相关(correlation)、关联(Association)三个阶段,筛选出一一对应的点迹航迹匹配对,即一个点迹对应一个航迹,再通过滤波器更新航迹状态,进行航迹更新或者生成新航迹1、预相关(pre-correlation)阶段在该阶段,使用24位地址码、地理位置等简单的判断标准过滤掉一些无法与航迹匹配的监视源点迹。
通过这个阶段后,每个航迹会有一组可能与之相关的点迹,每个点迹会有一组可能与之相关的航迹。
ADS-B技术分析和应用

ADS-B技术分析和应用ADS-B技术(Automatic Dependent Surveillance-Broadcast)是一种航空领域的先进技术,它被广泛应用于航空监控和飞行安全领域。
本文将对ADS-B技术进行详细分析,并探讨其在航空领域的应用。
1. ADS-B技术概述ADS-B技术是一种基于GPS导航系统的航空监控技术,它通过航空器上安装的ADS-B发射器向地面和其他飞行器发送飞行信息,包括位置、速度、高度等数据。
这些数据可以被地面监控站和其他飞行器接收,并用于飞行监控、空中交通管理和飞行安全等用途。
相比传统的雷达监控技术,ADS-B技术具有更高的精度和实时性,能够提高空中交通的安全性和效率。
相比传统的雷达监控技术,ADS-B技术具有许多优势。
ADS-B技术具有更高的精度和实时性,能够提供更准确、更新更快的飞行数据,有助于提高空中交通管理的效率。
ADS-B技术能够实现飞行器之间的信息共享,通过广播式的数据传输方式,让所有飞行器都能够获取到实时的飞行信息,从而避免了传统雷达监控中的“盲区”和“暗区”,提高了飞行安全性。
ADS-B技术还具有更广泛的应用范围,不仅可以用于民航飞行监控,还可以应用于通用航空、军用航空等领域,具有更大的市场潜力。
ADS-B技术已经在全球范围内得到了广泛的应用,包括民航、通用航空和军用航空等领域。
在民航领域,许多国家已经要求所有飞行器必须安装ADS-B设备,以便提高空中交通管理的效率和飞行安全性。
在通用航空领域,ADS-B技术也被越来越多地应用于小型飞行器和私人飞机上,为这些飞行器提供更好的飞行监控和安全保障。
在军用领域,ADS-B技术也被广泛应用于军用飞行器和军事航空基地,为军事航空活动提供了更先进的监控手段。
随着航空技术的不断进步,ADS-B技术也将不断发展和完善。
未来,ADS-B技术有望实现更高的精度和更广的覆盖范围,能够应对更多样化的空中交通管理需求。
ADS-B技术也将更多地与其他航空技术相结合,如自动驾驶技术、无人机技术等,共同推动航空领域的发展。
ADS—B和雷达数据融合的关键问题分析

ADS—B和雷达数据融合的关键问题分析程擎;张澍葳【摘要】针对自动相关监视系统(ADS-B)和雷达监视系统共同应用的情况,在多雷达跟踪系统的基础上发展了多传感器跟踪系统,讨论了多雷达跟踪系统不同模块的功能以及多传感器跟踪系统不同模块的升级和功能.针对多传感器跟踪系统的数据融合技术,分析了雷达和ADS-B的报告不同步、误差影响和机动检测等几个关键问题.%The case of joint action of the Automatic Dependent Surveillance System ( ADS-B) and radar surveillance system are described, the tracking system has been developed from multi radar tracking system(MRTS) to multi sensor tracking system ( MSTS), discussed the function of different modules of MRTS, and discussed the upgrades and features of different modules of MSTS . For data fusion technology of MSTS, some of key issues of radar and ADS-B reports are addressed. These key issues include time synchronization,bias influence and maneuver detection.【期刊名称】《科学技术与工程》【年(卷),期】2011(000)025【总页数】5页(P6237-6241)【关键词】ADS-B;雷达;多传感器;同步;更新率;机动检测【作者】程擎;张澍葳【作者单位】中国民航飞行学院,广汉618300;中国民航飞行学院,广汉618300【正文语种】中文【中图分类】V351.371 空管监视系统的发展近年来,世界民航快速发展,空中交通流量高速增长。
浅谈雷达和ADS-B信号监控系统
浅谈雷达和ADS-B信号监控系统朱翊(中国民用航空湛江空中交通管理站,广东湛江524000)摘要:随着航班流量的日益增多,空域环境的日渐复杂,一旦雷达信号或ADS-B信号中断未能及时处理,将会造成严重的影响。
雷达和ADS-B信号监控系统有着广泛的应用前景,可推广至各个空管运行单位、部队、气象中心等使用,提高运行保障能力。
本文就湛江空管站近期主、备用自动化接入的ADS-B信号,谈一下ADS-B信号接入自动化的配置等问题,以供分享与探讨。
关键词:ADS-B信号;雷达信号;自动化中图分类号:TP393文献标识码:A文章编号:1009-3044(2021)13-0170-04开放科学(资源服务)标识码(OSID):1引言ADS-B系统是由多地面站和机载站构成,是一种合作监视技术。
飞机定时广播通过卫星导航系统获得的位置信息(位置、高度、速度、航向、识别号及其他信息);与传统雷达系统相比,ADS-B不仅提供更实时准确的监视信息,还具有建设成本少、数据精度高、使用寿命长等明显优势。
近些年我国对ADS-B技术进行大量的研究,已研制出ADS-B发射和接收设备;并通过地空数据链将信号下发给地面站,经过数据中心的目标检测和多重验证后再进行应用。
在空中,相比传统A/C模式雷达信号,ADS-B信号对于频率的占用率大大减少,信号纠错和解码能力将增强。
在地面,利用ADS-B数据源,能加强对场面运行航空器的监视,减少地面冲突的发生。
ADS-B技术作为一种新型的监视方式,它是基于卫星导航和地空数据链通信系统,能有效克服由于雷达测距定位位置信息不准确的缺点,且具备更高的数据精度和数据更新率。
实时的飞行位置等数据,能够提高飞行效率。
2湛江ADS-B系统架构介绍湛江地区ADS-B系统共建设地面站3个,三级数据站1套,其中定向+全向配置地面站点1个,全向配置地面站点2个,已完成现场验收工作,并已在AeroTrac自动化系统测试平台中接入ADS-B信号,已完成了主用自动化系统、备用自动化系统的接入参数配置。
ADS-B与空管监视雷达的融合处理方式综述
ADS-B与空管监视雷达的融合处理方式综述雷达系统在空管监视工作中发挥着重要作用,但也存在一定不足,实现ADS-B与空管监视雷达的充分有效融合,将能够良好适应飞行流量不断增加的现状,提升空域安全管理水平。
文章主要是从ADS-B基本情况分析入手,重点介绍了ADS-B在空管监视中的优势,阐明了其和空管监视雷达融合的可行性,并提出了一些科学合理的融合处理方式,为切实有效推进空管监视工作的顺利有效开展提供了一定的参考和借鉴。
标签:ADS-B;雷达;空管监视;融合处理1 概述民航空管系统广泛使用雷达监视航空器,但雷达存在着一定的应用盲区,无法安装在一些特定地区。
为了更好强化监视管理空域的整体效果,持续改善航空器的协同避撞性能,现阶段国内民航系统内部已经全面启动ADS-B建设工程。
同时现阶段飞行流量持续增加,对于空中交通管制的监视技术也提出了较高的要求。
ADS-B能够良好覆盖雷達的盲区,科学有效融合ADS-B和雷达,将能够更好的提升空域监视管理的整体水平,保障空域安全。
2 ADS-B在空管监视中的优势2.1 ADS-B基本情况ADS-B,广播式自动相关监视,从字面上来看,表明其不需要人工操作和地面询问,机载设备全面提供各项信息,为目标位置和用户提供监视设备,并且数据传输方式是以广播形式传递所有使用合适装备的用户。
ADS-B工作原理,机载设备使用数据链系统,向地面站、同一区域内其他飞机传输信息,即飞机的四维位置信息及其他识别信息,通过广播的方式,促进管制员能实时监控飞机的状态。
现阶段ADS-B的使用,主要是包含UAT、1090ES以及VDL-4这三种传输链路格式。
(1)UAT是为了服务于ADS-B而专门设计的,采用简单的系统结构,拥有着较强的稳定性,在单一宽带信道中运行,传送率为1Mbps。
(2)1090ES。
这种传输链路在当前国内应用程度较高,其传输率同样为1Mbps,下行频率为1090MHz,脉冲编码是具体信息格式,传送报文过程中使用Asterix Cat021格式。
广播式自动相关监视(ADS-B)ADS-B全

国内外应用情况
亚太地区(TF/1,处于实验阶段)日本计划用 ADS-B增强雷达性能;澳大利亚在无雷达覆盖区布置 ADS-B印度利用ADS-B对雷达盲区进行补充,计划在Chennai进行一个试验;新加坡、日本和澳大利亚近期将在场面监视中利用ADS-B 技术;香港正在试验ADS-B用于机场场面监视;蒙古开始着手进行1090 ES和VDL Mode 4数据链实验;新西兰政府也应航空用户的要求批准在South Island进行一项ADS-B试验。
汇报内容
ICAO的研究情况
我国的发展规划
我国的发展情况
ICAO的研究情况
ICAOICAO考虑从2010年开始要求其成员国强制安装“ADS-B OUT”机载设备,自愿安装“ADS-B IN”机载设备和座舱显示器。ICAO预期1090 ES将能在未来至少十年内满足ADS-B服务的要求,未来可能需要另一种ADS-B数据链补充或替代1090 ES,以满足对ADS-B服务更高的运行需求。
技术概述
技术概述
ADS-B地面站
ADS-B “OUT”功能:
位置、高度、呼号、速度、爬升/下降率
可以在 TCAS或其他显示屏显示 观察范围比TCAS远 可以显示飞机的速度和呼号
可以在MFD或PDA上显示 接收频率为1090
空-空监视应用
ADS-B “IN”功能:
技术概述
技术概述
监视ห้องสมุดไป่ตู้段
广播式自动相关监视(ADS-B)
汇报内容
ICAO的研究情况
我国的发展规划
我国的发展情况
技术概述
ADS-B 含义A-自动:不需要人工操作和地面的询问。D-相关:信息全部基于机载设备。S-监视:提供位置和其它用于监视的数据。B-广播:数据不是针对某个特定的用户(在 ADS-C中是这样),而是周期性的广播给任何一 个有合适装备的用户。
ADS-B数据质量监测与雷达数据融合平台的研制

www ele169 com | 310 引言ADS-B(Automatic Dependent Surveillance–Broadcast,广播式自动相关监视),航空器通过广播模式的数据链,自动提供由机载导航设备和定位系统生成的数据,包括航空器识别、四维定位以及其他相关的附加数据。
近年来,ADS-B 技术在空管上的应用已经显示出了其重要的优势,其价格便宜,建站方便,在无法部署航管雷达的大陆地区为航空器提供优于雷达间隔标准的虚拟雷达管制服务。
空管系统要求监视数据稳定可靠,以便于为管制员提供最精确的辅助,但是由于ADS-B 稳定性等问题,致使其当前应用具有诸多局限,因此开发ADS-B 站数据质量监视系统具有实际意义。
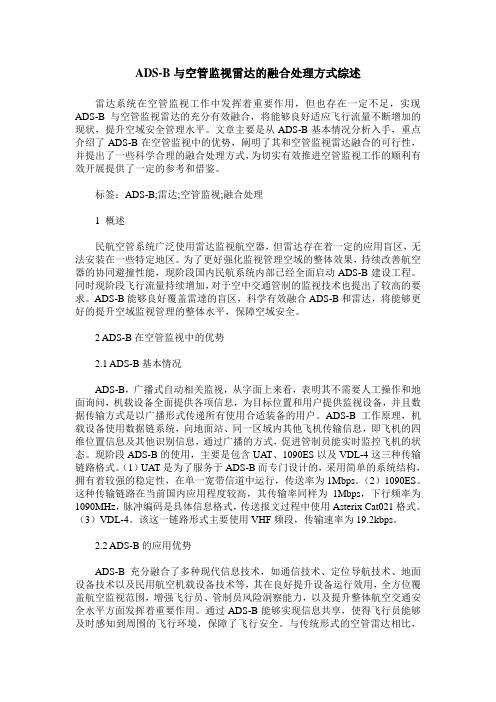
ADS-B 数据质量监测与雷达数据融合平台由ADS-B 及雷达数据接收及预处理服务、ADS-B 及雷达数据融合服务、ADS-B 数据质量监测服务组成,系统使用软件GPS 授时服务器为来系统提供统一时间基准,采用高性能交换机搭建数据交换网络,完成信息的交换传输工作。
系统总体结构图如图1所示。
系统配置有两个显示终端——ADS-B 站点监控终端和航班运行监控终端。
ADS-B 站点监控终端采用拓扑图的形式监控多个ADS-B 站点及信息传输网络的工作状态,完成站点管理,异常工作站点检测并提供告警输出和数据源控制功能。
航班运行监控终端则实时显示ADS-B 原始数据、雷1 ADS-B 数据质量监测方案ADS-B 数据质量监测主要由数据接入及预处理服务、ADS-B 数据质量检测服务来及ADS-B 站点监控终端来承载相关软件功能的实现。
ADS-B 数据质量监测实现方案如图2所示。
ADS-B 数据经接入后,在经过数据解析、坐标投影等基本预处理操作后,本项目拟采用CRC 检验、数据必备项检测、导航完整性(NIC)检测、航迹野值检测、数据通断检测及卡尔曼滤波跟踪等多种方法,来实现对ADS-B 站点的数据质量的实时监测及评估,并对数据质量波动情况较大、数据质量下降严重的站点进行异常告警输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADS-B与雷达数据的融合应用作者:谢峥来源:《科教导刊》2010年第21期摘要本文介绍了ADS-B的概念,对比了ADS-B与常规雷达的主要区别,分析了在空管自动化系统中ADS-B与雷达数据的融合处理过程,最后探讨了其技术优势和应用前景。
关键词ADS-B 雷达数据传感器航迹中图分类号:TN95文献标识码:A1 ADS-B概述ADS-B,即广播式自动相关监视,是一种利用空地、空空数据通信完成交通监视和信息传递的航行新技术,国际民航组织(ICAO)将其确定为未来监视技术发展的主要方向,并正积极推进该项技术的应用。
作为应用在空中交通服务中的监视技术,ADS-B主要实施空对空监视,装备了ADS-B机载设备的飞机通过数字式数据链,不停地广播其精确的4维位置信息(经度、纬度、高度和时间)和其它可能附加信息(冲突告警信息,飞行员输入信息,航迹角,航线拐点等信息)以及飞机的识别信息和类别信息。
ADS-B接收机与空中交通管理系统、其它飞机的机载ADS-B结合起来,在空地都能提供精确、实时的冲突信息。
ADS-B技术是新航行系统中非常重要的监视技术,与常规雷达相比,ADS-B能够提供更加实时和准确的航空器位置等监视信息,但对其建设投资只有前者的十分之一左右,并且维护费用低,使用寿命长。
使用ADS-B可以增加无雷达区域的空域容量,减少有雷达区域对雷达多重覆盖的需求,大大降低空中交通管理的费用。
但由于在技术体制、规划性、兼容性等个方面问题,单一依靠雷达系统或ADS-B实施空中交通监视,都会存在影响空中交通服务的有效性和可靠性的问题。
如何将ADS-B信息与雷达数据融合应用,成为一个有益的课题。
2 ADS-B与常规雷达的比较在工作原理和数据来源方面,常规的民用航管二次雷达,使用A/C询问模式工作,雷达向飞机询问,飞机的应答机向地面雷达发送气压高度和二次编码,地面雷达通过计算得出飞机的相对距离和方位。
而ADS-B无需应答,是飞机依靠星基GPS来确定精确位置,由机载设备将GPS定位系统的数据通过数据链,在飞机之间或与地面站互相不停广播各自的数据信息。
位置、高度、速度、航向、识别号等均由飞机本身提供。
在监视精度方面,常规雷达在规定范围内工作效果良好,但会受特殊的地理条件、障碍物等限制;而ADS-B有效的位置数据与雷达相比更为精确,并且可通过位置导航精度(NACp)等标准来衡量,在精度不满足精度质量因数(HFOM)或导航不确定度(NUC)时,能够主动告知。
在监视完整性方面,常规雷达会受到反射物、目标的分析计算等直接因素的影响,并与雷达头的技术维护程度有一定间接关系;ADS-B的完整性通常更为敏感,取决于GPS卫星和每个独立的机载航行系统以及机载设备的安装等情况。
在报告识别方面,常规雷达会产生大量的“伪”ID识别码,二次应答码由4位数组成,共4096个。
由于二次雷达动态分配ID,有可能会发生重码,而一次雷达则没有ID。
ADS-B使用S 模式的24比特ID,数量上远多于二次雷达的 3/A模式ID,故此每架飞机都是唯一的,并且提供目标识别(通常是发送航班号和飞机尾号)。
在下行传输数据方面,常规雷达接收的下传数据非常原始。
3/A和 C模式都是由飞机下行传下来的,容易出现错误,无法做适当的错误检查。
S模式解决了大多数的这些缺点。
而从飞机传下的ADS-B数据包括航路信息、航行参数以及相关导航参数等,有较好的错误检测能力,是一个完整的数据链通信系统。
在参考坐标系方面,雷达观测点迹使用与正北相关的斜距和角度,是空间直角坐标系。
ADS-B位置测量是基于WGS-84世界大地坐标系,使用/极坐标,只会有非常个别的错误,/与基于3D的测量相比,更为精准。
在地面设备方面,雷达站的投入成本大,维护复杂,且选址受地形等因素的限制。
而为满足航行监视的ADS-B地面基站,可以只安装接收机,只接收GPS信号和飞机下行广播,技术简单,成本较小。
在机载设备配备方面,常规雷达只需飞机配备二次应答机,现所有的民航飞机均配备。
对于一些没有二次应答机的航空器,一次雷达也可探测到。
而ADS-B需要每架飞机安装GPS接收机、数据链收发机及其天线、驾驶舱冲突信息显示器等相应的机载设备。
3 ADS-B与雷达信号在空管自动化系统中的融合应用随着我国航空公司机队规模扩大和机型的更新,近年来许多航空器都选装了适合新航行系统的机载电子设备,具备了地空双向数据通信能力。
同时有越来越多的空管自动化系统都具备了ADS航迹处理能力,标志着中国航空的主要空管设施已经具备了ADS监视能力。
如何将ADS-B信号与常规雷达信号融合呢?下面就以三亚管制区使用的美国Telephonics 公司的Aerotrac自动化系统为例进行分析说明。
3.1 数据解码ADS-B数据使用的Asterix Cat 021格式与常规雷达相比更为复杂, ADS-B数据通过地空数据链接入系统后,数据被高分辨率规范化的四字节计数器解码为标准格式数据。
3.2 完整性检查可靠性和完整性的检测,是为了保障ADS-B数据的完好性。
除了机载设备做基于 Cat021 UAP1.x DO-260A规范的自动完整性检查之外,系统还利用雷达黑白名单,允许用户管理他们自己的完整清单的黑白名单方案。
白名单定义为不超过NUC门限值的航空器列表,黑名单则为超过NUC门限值的航空器列表。
装有ADS-B机载设备的每架航空器都有其唯一的ICAO S 24位ID码,在白名单列表内的航空器发送的ADS-B数据可用,而黑名单内的则不可用。
同时系统允许多雷达处理维护人员针对特定的航空器建立其独立的静态权重,并允许提供信息到现有的相关雷达跟踪,以增加额外的信息(但不被允许去干预位置),来完善黑白名单判别机制。
故此,对不同机载设备的航空器,系统能够分别进行完整性检测。
3.3 航迹数据关联在一个混合传感器架构的自动化系统中,提供以下几种系统航迹:单纯的雷达传感器(来自于一个或多个雷达站)、单纯的ADS-B传感器(来自于一个或ADS-B地面基站)、混合航迹(ADS-B与雷达)以及其它(如飞行计划航迹)。
航迹数据关联是指在多个传感器数据源同时存在时,针对同一目标的跟踪数据值之间进行关联确认,形成对应关系。
合并来自不同站点的位置报告的条件:首先在位置上需要接近同一架飞机,并且具有相同的、唯一的二次代码(由飞机发出,应该是相同的,可以允许由于飞行员改变或雷达故障而短暂的不同),或是具有相同的、唯一的24比特ID。
包含更多的关键因素(如应答机的内部硬件编码,相对来说不会由传输过程中的处理而产生错误)。
雷达与ADS-B使用基本相同的合并原则,主要区别是ADS-B的24比特ID具有更强的相关性。
3.4 多传感器航迹融合系统在同一时间使用雷达和ADS-B两种信息(而不是指定优先一方或另一方),提供最小位置误差的系统航迹。
系统的多传感器数据融合模块(MST - Multi Sensor Tracker)使用动态数据精度监测以平衡ADS-B和雷达数据,对一个目标的多个关联数据进行相对权重的加权计算,当某一路传感器质量下降时,系统MST将自动降低其权重,甚至必要时完全舍弃该报告。
系统的MST 在传感器之间促进的数据融合基于它们的相对精度,当ADS-B的数据完好性以及更新频率均满足系统门限时,视为权重最高的类雷达数据进行加权融合,从而输出高于常规雷达精度的系统融合航迹。
可靠的相关和精度信息可由传感器内部计算(常规的雷达传感器及模式S)或由来源提供(ADS-B)。
为了提高精度和完整性,系统两种方案都使用,并且充分保留了雷达在/极坐标上的方向和探测,故此可以更好地融合ADS-B信号。
3.5 系统航迹与飞行计划相关联系统航迹一旦产生,MST将会把系统航迹与现有的飞行计划相关联。
当航迹包含二次代码时,这种关联基于二次代码和飞行计划,航迹标牌将显示来自飞行计划的航班号。
当飞行计划和来自ADS-B的下行航空器数据不一致时,航迹标牌将显示告警。
另一方面,当系统航迹仅由ADS-B产生,并且不能成功地与飞行计划相关时,航迹标牌也会有告警,提示飞行员没有将正确的飞行计划输入ADS-B应答机。
当一个系统航迹仅由ADS-B报告产生,基于二次代码和飞行计划的关联准则不再适用。
在这种情况下,系统从飞行计划中的航空公司和飞机注册号来确定相应的ICAO 24比特ID。
一旦确认24比特ID,MST将用24比特ID代替二次代码与飞行计划进行关联。
4 总结ADS-B作为一项关键技术出现,用于空中交通管制,可以在无法部署航管雷达的大陆地区和广阔的洋区为航空器提供优于雷达间隔标准的虚拟雷达管制服务;在雷达覆盖地区,即使不增加雷达设备也能以较低代价增强雷达系统监视能力,提高航路乃至终端区的飞行容量;单一ADS-B 接收地面站组网,可作为雷达监视网的旁路系统,并可提供不低于雷达间隔标准的空管服务;利用ADS-B技术还在较大的区域内实现飞行动态监视,以改进飞行流量管理。
ADS-B与雷达传感器一起使用,可以实现在有雷达覆盖和无雷达覆盖的管制区,无缝集成,提供给管制员统一的、完整协调的空域和飞行数据画面。
ADS-B技术在空管上的应用,预示着传统的空中交通监视技术即将发生重大变革。
参考文献[1]何友.雷达数据处理及应用[M].北京:电子工业出版社,2009.[2]RTCA DO-260A. Minimum operational performance standards for 1090 MHz automatic dependent surveillance-broadcast (ADS-B). Washington D. C.: RTCA Inc., 2003.[3]White Paper for Sensor Data Processing (SDP) System, AeroTrac? ADS-B Implementation Approach, Telephonics.。