遥感图像处理实例分析05(空间滤波)
智能遥感图像处理技术的算法原理与应用实例
智能遥感图像处理技术的算法原理与应用实例遥感图像处理是利用遥感技术获取的卫星、航空等传感器获取的图像数据进行分析、处理和解释的过程。
智能遥感图像处理技术则是指利用人工智能和机器学习等技术将图像数据进行智能化处理和分析,以实现更精确、自动化的图像解释和应用。
算法原理智能遥感图像处理技术的算法原理主要包括以下几个方面:1. 数据预处理:在进行图像处理之前,通常需要对原始遥感图像数据进行预处理,以去除噪声、调整图像亮度和对比度等。
常见的预处理方法有均值滤波、中值滤波和直方图均衡化等。
2. 特征提取:特征提取是将图像数据转化为可以用于计算机处理的特征向量或特征图。
常见的特征提取方法有边缘检测、纹理特征提取和颜色直方图等。
3. 目标检测:目标检测是指从图像中自动识别和定位感兴趣的目标。
常见的目标检测算法有基于特征的方法、基于机器学习的方法和基于深度学习的方法等。
4. 分类与识别:分类与识别是将目标对象进行分类和识别的过程。
常见的分类与识别算法有支持向量机、随机森林和卷积神经网络等。
5. 地物提取与变化检测:地物提取与变化检测是指从遥感图像中提取具体地物信息和检测地物变化的过程。
常见的地物提取与变化检测算法有阈值分割、区域生长和多时相影像分析等。
应用实例智能遥感图像处理技术在许多领域中具有广泛的应用,下面将介绍几个具体实例:1. 土地利用与覆盖分类:利用遥感图像处理技术,可以自动化地对土地利用和覆盖进行分类和监测。
通过分析遥感数据并运用合适的分类算法,可以实现对不同类型的土地利用和覆盖进行精确的检测和分类,如农田、森林、湖泊等。
2. 灾害监测与预警:智能遥感图像处理技术还可以应用于灾害监测与预警中。
通过对遥感图像数据进行实时监测和分析,可以准确快速地检测出地震、洪水、火灾等灾害发生的位置和范围,并及时预警和采取相应的救援措施。
3. 城市规划与交通管理:智能遥感图像处理技术在城市规划和交通管理中的应用也越来越重要。
遥感图像处理

遥感图像处理1. 简介遥感图像处理是指利用遥感技术获取的卫星或无人机等遥感图像数据进行处理和分析的过程。
遥感图像处理可以应用于多个领域,包括地理信息系统(GIS)、环境监测、农业、城市规划等。
本文将介绍遥感图像处理的基本概念、常用方法和应用案例。
2. 遥感图像处理的基本概念遥感图像处理涉及多个概念和技术,以下是一些常用的基本概念:2.1 遥感图像遥感图像是通过遥感设备获取的图像数据,可以是卫星图像、航空摄影图像或无人机图像等。
遥感图像通常包含多个波段,每个波段代表不同的光谱信息。
2.2 遥感图像预处理遥感图像预处理是指对原始遥感图像数据进行校正、矫正和增强的过程。
预处理的目的是提高图像质量、减少噪声和伪影,并使得图像更适合进行后续处理和分析。
2.3 遥感图像分类遥感图像分类是指将遥感图像根据像素的特征或属性进行划分和分类的过程。
常见的遥感图像分类方法包括基于统计学的分类、基于机器学习的分类和基于深度学习的分类。
2.4 遥感图像变化检测遥感图像变化检测是指对多个时间点的遥感图像进行比较,以检测地物、景观或环境发生的变化。
遥感图像变化检测可以用于监测自然灾害、环境变化等。
2.5 遥感图像分析遥感图像分析是指对遥感图像进行解译和分析,提取图像中的有用信息和特征。
遥感图像分析可以用于土地利用/覆盖分类、植被指数计算等应用。
3. 遥感图像处理的常用方法遥感图像处理常用的方法包括图像增强、图像配准、图像融合和目标检测等。
3.1 图像增强图像增强是指通过对图像进行滤波、对比度拉伸、直方图均衡化等处理,以增强图像的可视化效果和信息提取能力。
常用的图像增强方法包括直方图均衡化、滤波(如中值滤波、高斯滤波)和锐化等。
3.2 图像配准图像配准是指将两幅或多幅遥感图像在坐标系、旋转、尺度和形变等方面进行校正和匹配的过程。
常用的图像配准方法包括特征点匹配、地物匹配和基于控制点的配准方法。
3.3 图像融合图像融合是指将多幅具有不同光谱或分辨率的遥感图像融合成一幅多光谱和高分辨率的遥感图像。
遥感图像处理实验报告_图像的频率域滤波处理
遥感图像处理实验报告(2013 —2014 学年第1学期)实验名称:图像的频率域滤波处理实验时间:实验地点:指导教师:专业班级:姓名:学号:一:实验目的1:掌握滤波器在程序语言中的定义算法2:理解图像的频率域与空间域之间的区别与联系3:在频率域对图像进行处理,达到平滑(低通滤波)与锐化(高通滤波)的目的二:实验内容1:在Matlab中定义滤波器2:对图像进行频率域处理3:对频率域的处理结果,结合第3次实验(空间域处理)结果进行对比,给出评价三:实验代码及Matlab使用心得(注释中)%清屏,清除工作空间,关闭所有绘图窗口clc;clear all;close all;%读取图像,并建立一个窗口,显示原始图像I = imread('C:\Users\浮生\Desktop\大三\Matlab\data\lena.png', 'png')figure(1)imshow(I)title('原始图像')%图像傅立叶变换%fft(X)函数的作用是,返回矩阵X的【二维离散傅立叶变换】结果%fft()函数采用快速傅立叶变换算法,运算结果的行列数与被变换矩阵的规格相同F = fft2(I);%fftshift()函数的功能则是把FFT的DC分量移动到频谱矩阵的中心%在直观上,就是把低频信息移到矩阵中心,便于直观观看图像的频谱F = fftshift(F);%由于FFT的运算结果的数值跨幅过大%直接显示的话只能看到一个小亮点%为了显示的直观,我们需要自行定义灰度显示幅度%在本例中,我们定义显示幅度为0-50000figure(2);imshow(abs(real(F)), [0 50000]);title('频率域图像')%%%%%%定义滤波器之前的准备工作%%%%%[m n] = size(I);%读取图像的规格p = m/2;%定义两个计数器p和qq = n/2;%用以控制滤波器的遍历过程image = zeros(m,n);%%%%%%截止频率为50的理想低通滤波器%%%%%%%低通滤波器,即让频率高于阈值的信号值为0,而在阈值之下的所有信号保持原样%反映在图像操作中,将去除高频信息,达到平滑的效果lowpass_50 = F;for u = 1:mfor v = 1:nif sqrt((u-p)^2 + (v-q)^2) < 50%什么也不做;elselowpass_50(u, v) = 0;endendend%显示频率域图像figure(3);imshow(abs(real(lowpass_50)), [0 50000]);title('频率域图像截止频率为50的理想低通滤波器');%傅立叶逆运算反算图像image = ifftshift(lowpass_50);%还原矩阵image = ifft2(image);%傅立叶逆运算image = abs(real(image));%复数取实部%显示处理结果图像figure(4);imshow(image, []);title('处理结果截止频率为50的理想低通滤波器')%%%%%%截止频率为100的理想低通滤波器%%%%%%lowpass_100 = F;for u = 1:mfor v = 1:nif sqrt((u-p)^2 + (v-q)^2) < 100%什么也不做;elselowpass_100(u, v) = 0;endendend%显示频率域图像figure(5);imshow(abs(real(lowpass_100)), [0 50000]);title('频率域图像截止频率为100的理想低通滤波器'); %傅立叶逆运算反算图像image = ifftshift(lowpass_100);%还原矩阵image = ifft2(image);%傅立叶逆运算image = abs(real(image));%复数取实部%显示处理结果图像figure(6);imshow(image, []);title('处理结果截止频率为100的理想低通滤波器')%%%%%%截止频率为50的理想高通滤波器%%%%%% highpass_50 = F;for u = 1:mfor v = 1:nif sqrt((u-p)^2 + (v-q)^2) < 50highpass_50(u, v) = 0;else%什么也不做;endendend%显示频率域图像figure(7);imshow(abs(real(highpass_50)), [0 50000]);title('频率域图像截止频率为50的理想高通滤波器');%傅立叶逆运算反算图像image = ifftshift(highpass_50);%还原矩阵image = ifft2(image);%傅立叶逆运算image = abs(real(image));%复数取实部%显示处理结果图像figure(8);imshow(image, []);title('处理结果截止频率为50的理想高通滤波器')%%%%%%截止频率为100的理想高通滤波器%%%%%% highpass_100 = F;for u = 1:mfor v = 1:nif sqrt((u-p)^2 + (v-q)^2) < 100highpass_100(u, v) = 0;else%什么也不做;endendend%显示频率域图像figure(9);imshow(abs(real(highpass_100)), [0 50000]);title('频率域图像截止频率为100的理想高通滤波器');%傅立叶逆运算反算图像image = ifftshift(highpass_100);%还原矩阵image = ifft2(image);%傅立叶逆运算image = abs(real(image));%复数取实部%显示处理结果图像figure(10);imshow(image, []);title('处理结果截止频率为100的理想高通滤波器')%%%%%%截止频率为50的巴特沃斯低通滤波器%%%%%% for u = 1:m,for v = 1:nD=sqrt((u-p)^2 + (v-q)^2);Butterworth(u,v)=1/(1+D/50)^(2*2);endend%显示频率域图像figure(11);imshow(abs(real(Butterworth)), []);title('频率域图像截止频率为50的巴特沃斯低通滤波器'); %傅立叶逆运算反算图像image = F.*Butterworth;image = ifftshift(image);image = abs(ifft2(image));%显示处理结果图像figure(12);imshow(image, []);title('处理结果截止频率为50的巴特沃斯低通滤波器')%%%%%%截止频率为50的高斯低通滤波器%%%%%%for u=1:m,for v=1:nD=sqrt((u-p)^2 + (v-q)^2);Gaussian(u,v)=exp(-D^2/(2*50^2));endend%显示频率域图像figure(13);imshow(abs(real(Gaussian)), []);title('频率域图像截止频率为50的高斯低通滤波器'); %傅立叶逆运算反算图像image = F.*Gaussian;image = ifftshift(image);image = abs(ifft2(image));%显示处理结果图像figure(14);imshow(image, []);title('处理结果截止频率为50的高斯低通滤波器');四:实验结果(仅列一例)五:实验心得1:相较空域滤波,频率域滤波的算法复杂度更高。
遥感图像的空间增强

遥感影像预处理实验报告图1-12.ERDAS图标面板菜单条:ImageInterpreter→Spatial Enhancement→Convolution→Convolution对话框。
选择参数如图1-2:图1-2对lanier.img进行3*3,5*5,7*7低通滤波处理,结果如图1-3,1-4,1-5,图1-3图1-4图1-5二.空间锐化滤波1.打开影像,如上图1-1。
2.ERDAS图标面板菜单条:Image Interpreter→Spatial Enhancement→Convolution→Convolution对话框。
分别选用3*3,5*5,7*7的高通滤波进行处理。
如图2-1,2-2,2-3。
图2-1图2-2图2-3采用交叉边缘探测3*3Horizontal Edge Detection,结果如图2-4:图2-4采用边缘增强3*3Edge Enhance,结果如图2-5:图2-5 Laplace算法处理影像,结果如图2-6:图2-6三.自定义滤波核对影像进行处理1.ERDAS图标面板菜单条:Image Interpreter→Spatial Enhancement→Convolution→Convolution对话框。
点击Edit,弹出窗口。
如图3-1图3-12. 以模拟交叉检测的系数自定义滤波核。
建立2行2列矩阵,分别以135°方向和45°方向的值总和相加为0进行处理。
如图3-2:图3-23.点击File—librarian---save---close保存。
4.输出系数135°矩阵结果,如图3-3:图3-34.输出系数45°矩阵结果,如图3-4:图3-4总结:在平滑图像处理中,如果有很多的噪声情况下,图像平滑能够有效的减弱噪声对图像的影像。
图像平滑处理中能将噪声很好的去除。
但是细节会给模糊掉,从而降低图像的质量。
图像锐化是让图像变得更为清晰。
遥感图像处理实例分析05(空间滤波)
空间滤波(spatial filters)空间滤波(又称local operation)空间滤波是一种通用的光栅图像处理操作。
是根据某像素周围像素的数值,修改图像中的该像素值.它能增强或抑制图像的空间细节信号,提高图像的可视化解释。
如应用滤波增强图像的边界信息,去除或减少图像中的噪音图案。
突出结构特征等.空间频率(Spatial frequency)空间频率是所有类型的光栅数据共有的特性,它的定义是指图像中的任何一特定部分,每单位距离内数据值的变化数量.对图像上数据变化小、或渐进变化的区域称为低频区域(如平滑的湖面),对图像上数据变化大、或迅速变化的区域称为高频区域(如布满密集公路网的城区).空间滤波分为三大类:低通滤波(Low pass filters):强调的是低频信息,平滑了图像的噪音、减少了数据的菱角。
因为它不在重视图像的细节部分,所以低通滤波有时又称为平滑或均值滤波。
高通滤波(High pass filters):强调的是高频信息,增强或锐化线性特征,象公路、断层、水陆边界。
因为它没有图像的低频部分,增强了图像的细节信息,所以高通滤波有时又称为锐化滤波。
边界检测滤波(Edge detection filters):强调的是图像中目标或特征的边界,以便更容易分析。
边界检测滤波通常建立一个灰色背景图和围绕图像目标或特征边界的黑白色线.卷积核(convolution kernels)卷积核是指二维矩形滤波距阵(或窗口),包含着与图像像素值有关的权值。
滤波距阵(或窗口)在图像上从左向右,自上而下,进行平移滑动,窗口中心的像素值是根据其周围像素值与窗口中对应的每个像素的权值乘积就和而计算出来的。
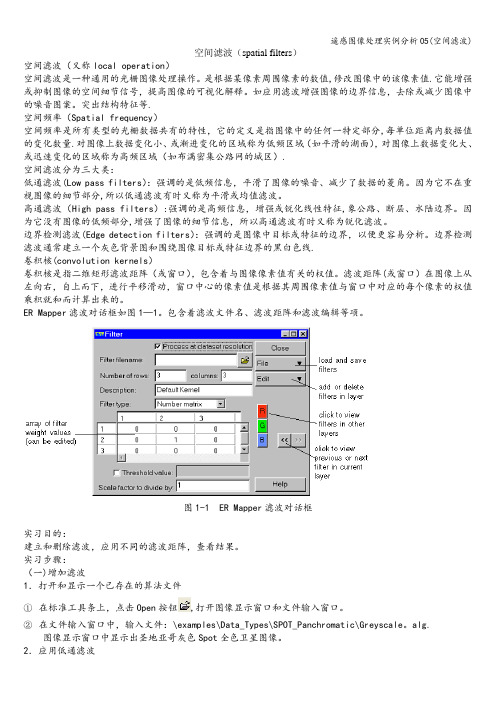
ER Mapper滤波对话框如图1—1。
包含着滤波文件名、滤波距阵和滤波编辑等项。
图1-1 ER Mapper滤波对话框实习目的:建立和删除滤波,应用不同的滤波距阵,查看结果。
实习步骤:(一)增加滤波1.打开和显示一个已存在的算法文件①在标准工具条上,点击Open按钮,打开图像显示窗口和文件输入窗口。
2遥感图像增强——空间滤波(教案).docx

实验二遥感图像增强——空间滤波注:实验采用软件为加拿大产遥感专业图彖处理软件PCI,为便于对比及评分,实验图像一般采用安装盘自带文件夹DEMO下irvine.piXo一、滤波的原理及方法在遥感图像处理中,经常采用空间域中的邻域处理方法來改变遥感图像中像元与其周围相邻像元的关系,即“空间滤波”,來突出遥感图像上某些特征,如突出边缘或纹理等。
传统的空间滤波方法有图像卷积运算、平滑、锐化。
图像卷积运算是在空间域上对图像进行邻域检测的运算,具体做法是选定一个卷积函数t(m, n),又称为“模板”,即一个MxN的图像,运算时,从图像左上角开始一个为模板同样大小的活动窗口U(m, n),使活动窗口与模板像元的灰度值对应相乘再相加,计算结果r(i, j)作为活动窗口屮心像元的新的灰度值。
在平滑处理中,均值平滑是将每个像元在以其为中心的区域内取平均值來代替该像元值以达到去掉尖锐“噪声”和平滑图像的目的。
常用的邻域冇4-邻域和8-邻域。
在屮值滤波屮则是以某像元为中心的邻域内取中间亮度值来代替该像元值,以达到去掉尖锐“噪声”和平滑图像的目的。
空间滤波是指在图像空间(x, y)或空间频率(J H)对输入图像应川若干滤波函数而获得改进的输出图像的技术,即对图像屮某些空间、频率特征的信息增强或抑制,如增强高频信息,即突出边缘、纹理、线条等。
增强低频信息抑制高频信息、既去掉细节。
其效果冇噪声的消除,边缘及线的增强,图像的清晰化等。
注意突出的图像上的某些特征,突出边缘或图像处理方法,也叫做“空间滤波”,它属于一种儿何增强处理。
空间滤波技术的基本思路有3条:Fil血滤波,操作如下:①提取原图像的边缘信息,进行加权处理,然示与原图像亞加;②提取原图像屮的模糊成分进行加权处理,然示与原图叠加;③使用某一指定的两数对原图像进行加权,是图像产生尖锐或平滑的效果。
在进行运算吋,多采用空间卷积技术,即在原图像上移动“活动窗口”,逐块进行局部运算。
空间滤波实验报告

空间滤波实验报告空间滤波实验报告引言:空间滤波是数字图像处理中常用的一种方法,它通过对图像像素进行加权平均或其他操作,以改善图像的质量和增强特定的图像细节。
在本次实验中,我们将探索几种常见的空间滤波技术,并评估它们在不同图像上的效果。
一、均值滤波均值滤波是一种简单的空间滤波方法,它通过计算像素周围邻域的平均值来平滑图像。
在本次实验中,我们选择了一张包含噪声的图像进行均值滤波处理。
结果显示,均值滤波能够有效地减少噪声,但同时也会导致图像的细节模糊化。
这是因为均值滤波是一种线性滤波方法,它对所有像素都施加相同的权重,无法区分图像中的边缘和纹理。
二、中值滤波中值滤波是一种非线性滤波方法,它通过将像素周围邻域的像素值排序并选取中间值来进行滤波。
与均值滤波相比,中值滤波能够更好地保留图像的细节信息。
在实验中,我们使用了一张包含椒盐噪声的图像进行中值滤波处理。
结果显示,中值滤波能够有效去除椒盐噪声,同时也能够保持图像的细节纹理。
这是因为中值滤波对于噪声像素有较好的鲁棒性,能够准确地估计图像中的真实像素值。
三、高斯滤波高斯滤波是一种基于高斯函数的空间滤波方法,它通过对像素周围邻域的像素值进行加权平均来平滑图像。
与均值滤波不同的是,高斯滤波对于不同像素位置的权重是不同的,它能够更好地保持图像的细节和边缘。
在实验中,我们对一张包含高斯噪声的图像进行了高斯滤波处理。
结果显示,高斯滤波能够有效地降低噪声水平,同时也能够保持图像的细节纹理。
这是因为高斯滤波能够根据像素周围邻域的像素值分布来调整权重,从而更好地平衡了图像的平滑度和细节保留。
四、边缘检测除了平滑图像,空间滤波还可以用于边缘检测。
边缘检测是一种常用的图像处理任务,它能够准确地提取图像中的边缘信息。
在实验中,我们使用了一张包含边缘的图像进行了边缘检测实验。
通过应用一种基于梯度的空间滤波算子,我们成功地提取出了图像中的边缘信息。
结果显示,边缘检测能够有效地突出图像中的边缘,但同时也会引入一定的噪声。
遥感图像处理实例分析01(算法、图像增强)

图像处理(Image processing)基本概念数字图像处理(digital image processing)指的是使用计算机巧妙处理以数字格式存储图像数据的过程。
其目的是提高地理数据质量,使其对使用者更有意义,并能提取定量信息,解决问题。
数字图像(digital image)的存储是以二维数组或网格的形式保存像素值,每个像素在空间上对应着地表一块小面积。
数组或网格又称光栅,所以图像数据经常叫着光栅数据。
光栅数据的排列是这样:水平行叫着线(lines),垂直列叫着样品(samples)(如图1-1)。
图像光栅数据的每个像素代表着是数字(digital number),简称DN。
图1-1 光栅数据图像数字DNs在不同的数据源中,代表着不同的数据类型。
如对Landsat、SPOT卫星数据,DNs代表的是地物在可见光、红外或其它波段的反射强度。
对雷达图像,DNs代表的是雷达脉冲返回到天线的强度。
对数字地形模型(DTMs),DNs代表的是地形高程。
通过应用数学变换,图像转化为数字图像。
ER Mapper可以增强数字图像,突出和提取传统手工方法难以得到的细小信息。
这就是为什么图像处理能成为所有地球科学应用的强大工具的原因多光谱数据(multispectral data)指的是多波段数据,图像数据中含有多个波段的反射强度。
图像处理技术随着合并不同波段的信息而发展,突出了一些特别类型的信息,如植被指数、水质量参数、地表矿物出现类型等。
图像处理广泛应用在地球科学的制图、分析和模型应用上。
主要有:土地利用/土地覆盖制图和变迁勘察(land use/land cover mapping and change detection)、农业评价和监测(agricultural assessment and monitoring)、海岸线和海洋资源管理(coastal and marine resource management)、矿产勘查(mineral exploration)、石油和天然气勘查(o il & gas exploration)、森林资源管理(forest resource management)、城市规划和变迁勘察( urban planning and change detection)、无线通讯定点和规划(telecommunications siting and planning)、海洋物理学(physical oceanography)、地质和地形制图(geology and topographic mapping)、冰川探测和制图(sea ice detection and mapping)等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空间滤波(spatial filters)空间滤波(又称local operation)空间滤波是一种通用的光栅图像处理操作。
是根据某像素周围像素的数值,修改图像中的该像素值。
它能增强或抑制图像的空间细节信号,提高图像的可视化解释。
如应用滤波增强图像的边界信息,去除或减少图像中的噪音图案。
突出结构特征等。
空间频率(Spatial frequency)空间频率是所有类型的光栅数据共有的特性,它的定义是指图像中的任何一特定部分,每单位距离内数据值的变化数量。
对图像上数据变化小、或渐进变化的区域称为低频区域(如平滑的湖面),对图像上数据变化大、或迅速变化的区域称为高频区域(如布满密集公路网的城区)。
空间滤波分为三大类:低通滤波(Low pass filters):强调的是低频信息,平滑了图像的噪音、减少了数据的菱角。
因为它不在重视图像的细节部分,所以低通滤波有时又称为平滑或均值滤波。
高通滤波(High pass filters):强调的是高频信息,增强或锐化线性特征,象公路、断层、水陆边界。
因为它没有图像的低频部分,增强了图像的细节信息,所以高通滤波有时又称为锐化滤波。
边界检测滤波(Edge detection filters):强调的是图像中目标或特征的边界,以便更容易分析。
边界检测滤波通常建立一个灰色背景图和围绕图像目标或特征边界的黑白色线。
卷积核(convolution kernels)卷积核是指二维矩形滤波距阵(或窗口),包含着与图像像素值有关的权值。
滤波距阵(或窗口)在图像上从左向右,自上而下,进行平移滑动,窗口中心的像素值是根据其周围像素值与窗口中对应的每个像素的权值乘积就和而计算出来的。
ER Mapper滤波对话框如图1-1。
包含着滤波文件名、滤波距阵和滤波编辑等项。
图1-1 ER Mapper滤波对话框实习目的:建立和删除滤波,应用不同的滤波距阵,查看结果。
实习步骤:(一)增加滤波1.打开和显示一个已存在的算法文件①在标准工具条上,点击Open按钮,打开图像显示窗口和文件输入窗口。
②在文件输入窗口中,输入文件:\examples\Data_Types\SPOT_Panchromatic\Greyscale.alg。
图像显示窗口中显示出圣地亚哥灰色Spot全色卫星图像。
2.应用低通滤波①在主菜单工具按钮上,点击Edit Filter (Kernel) 按钮,滤波窗口出现。
②在滤波窗口上,从File菜单中,选择Load项。
滤波文件选择窗口出现。
③在滤波文件选择窗口中,输入滤波文件\kernel\filters_lowpass\avg3.ker。
低通滤波建立了模糊或均值化效果。
通常情况下,低通滤波是将窗口中所有像素的平均值分配给中心像素,这样平滑掉数据中跳妖的菱角的数据。
低通滤波对于减少图像上周期性“胡椒面”噪音或斑点,是有用的,它使解释主要特征更容易了。
3.删除低通滤波在滤波窗口上,从Edit菜单中,选择Delete this filter项。
ER Mapper删除掉刚进行的低通滤波运算,图像恢复原样。
4.应用高通滤波①在滤波窗口上,从File菜单中,选择Load项。
滤波文件选择窗口出现。
②在滤波文件选择窗口中,输入滤波文件\kernel\filters_high_pass\Sharpen2.ker。
通常情况下,高通滤波是增强了图像边界特征周围的局部对比度,这样图像显得锐化或清新。
象公路、城区与植被区的边界特征更清楚的定义了。
5.删除高通滤波在滤波窗口上,从Edit菜单中,选择Delete this filter项。
ER Mapper删除掉刚进行的高通滤波运算,图像恢复原样。
6.应用方向梯度边缘检测滤波①在滤波窗口上,从File菜单中,选择Load项。
滤波文件选择窗口出现。
②在滤波文件选择窗口中,输入滤波文件\kernel\filters_sunangle\North_West.ker。
North_West滤波是一种非线性滤波。
对于图像中特征变化呈从东北向西南方向延伸的信息,具有离析和提升边界的效果。
7.调整滤波图像对比度①在普通功能工具条上,单击“Edit Transform Limits”按钮,“变换”对话框出现。
②在“变换”对话框中,从Limits菜单中选择Limits to Actual项。
图像对比度增强,大多数像素被分配给中灰度色彩。
③在“变换”对话框中,单击“Create autoclip transform”按钮。
ER Mapper通过对比度增强,重新显示了图像。
边缘特征通过黑白色被突出,没有锐化的特征区域如海洋,以灰色显示。
这种滤波突出了图像的边缘特性,好象从图像的西北处(左上方)照射,所以面向西北方向的边缘特性被增强,显亮。
背向的显暗。
边缘增强滤波通常用于地质应用,如断层、线性轮廓的突出等。
注意:方向梯度边缘检测滤波会产生不同的数据范围,图像对比度较差,需要进行对比度变换,而上面的其它两种滤波不需要进行对比度变换。
8.应用东北方向的梯度边缘检测滤波①在滤波窗口上,从File菜单中,选择Load项。
滤波文件选择窗口出现。
③在滤波文件选择窗口中,输入滤波文件\kernel\filters_sunangle\North_East.ker。
这次面向东北方向的边缘特性被增强,显亮。
图像中特征变化呈从西北向东南方向延伸的信息。
②关闭所有窗口。
(二)建立斜坡和方位图像1.打开一个灰度DEM(digital elevation model)算法①在主菜单上,点击Open按钮。
②输入文件\examples \Data_Types\Digital_Elevation\Greyscale.alg。
ER Mapper显示了圣地亚哥数字高程(DEM)图像。
以灰色模型显示,低值区显示暗,高值区显示亮。
如图1-10图1-10 圣地亚哥数字高程(DEM)图像图1-11ER Mapper显示的坡度图像2.装入滤波,建立斜坡度图像①在主菜单上,点击“Edit Filter (Kernel)”按钮。
②在滤波窗口中,打开文件夹按钮。
③输入滤波文件名:\kernel\filters_DEM\slope_degrees.ker。
④在主菜单上,点击“99% Contrast enhancement”按钮。
经过内部计算,ER Mapper显示出了坡度图像,陡坡的斜面以亮灰色显示,平缓的斜面以暗灰色显示,如图1-11。
斜坡是地面陡度的一个测量尺度。
是地形表面给定区域附近高程的变化率。
这个滤波产生的斜坡值是斜面与水平面的角度值,变化范围从0度(平坦地形)到90度(垂直地形)。
ER Mapper也提高了一种百分率计算的斜坡,滤波文件为slope_percent.ker。
3.装入不同滤波文件,产生方位图像①在滤波窗口中,打开文件夹按钮。
③输入滤波文件名:\kernel\filters_DEM\aspect.ker。
④关闭滤波窗口。
⑤在主菜单上,点击“99% Contrast enhancement”按钮。
ER Mapper以不同的灰度阴影,显示出高程数据的不同方位角图像,如图1-12。
方位角(Aspect)是用罗盘测量地形表面特定点方向的尺度。
从正北0度开始,变化范围为0-360度。
朝东的斜坡,方位角为90度。
朝南的斜坡,方位角为180度。
朝西的斜坡,方位角为270度。
图1-12 高程数据方位角灰度图像图1-13 高程数据方位角假彩色图像4.改变显示模式①打开算法窗口,选择Surface标签。
②从Color Table列表栏中,选择azimuth项。
图像以4种颜色重新显示,每种代表着一个罗盘方向,主要面向北的区域显示黑色,东的显黄色,南的显白色,西的显兰色。
(三)为多层添加滤波1.打开和显示一个RGB图像①在主菜单上,点击Open按钮。
②输入文件\examples\Data_Types\SPOT_XS\SPOT_XS_rgb_321.alg。
图像为SPOT XS卫星RGB(321)彩色合成图像,如图1-14。
图1-14 RGB(321)彩色合成图像图1-15 RGB高通滤波图像2.打开算法窗口和滤波对话框①点击“算法”按钮,打开算法窗口。
②点击“公式”按钮后面的“滤波”按钮,打开了滤波对话框。
3.应用高通滤波对RGB三层运算①在“滤波”对话框中,点击“Move to next Red layer in surface”按钮,系统对R层进行滤波。
②在滤波窗口中,打开文件夹按钮。
③输入滤波文件名:\kernel\ filters_high_pass\Sharpen2.ker。
同样的方法对G和B层进行高通滤波。
图像效果图为图1-15。
(四)使用多个有序滤波1.显示一个灰度图像①在标准工具条上,点击Open按钮。
②输入文件\examples\Data_Types\SPOT_ Panchromatic\Greyscale.alg。
图像为SPOT Panchromatic卫星图像,如图1-16。
2.添加一个方向边缘检测滤波①点击“算法”按钮,打开算法窗口。
②点击“公式”按钮后面的“滤波”按钮,打开了“滤波”对话框。
③在“滤波“对话框中,打开“文件选择器”按钮。
③输入滤波文件名:\kernel\ filters_ sunangle\North_West.ker。
滤波窗口如图1-17滤波后图像如图1-18。
ER Mapper运用西北向滤波,突出了东北向西南方向伸张的边缘特性。
图1-16 SPOT Panchromatic卫星图像图1-17 滤波窗口North_West.ker 图1-18 North_West.ker滤波后图像3.添加一个高通滤波①在“滤波”对话框中,从Edit菜单中,选择Append new filter项。
算法窗口中,添加了第二个滤波按钮,但是空的。
②从File菜单中,选择Load项。
文件选择器窗口打开。
③在文件选择器窗口中,输入文件高通滤波文件:\kernel\filters_high_pass\Sharpen2.ker。
滤波窗口如图1-19,滤波后图像如图1-20。
ER Mapper通过高通滤波,锐化了边缘附近的高频信息。
这时,在算法窗口中,已经装入了2个滤波文件。
图1-19 高通滤波窗口图1-20高通滤波后图像4.调整滤波图像对比度①在算法窗口中,选择“变换”按钮,打开“变换”对话框。
②在“变换”对话框中,从Limits菜单中,选择Limits to Actual项。
X轴的变化区间与图像像素值实际边界相符。
图像对比度增强,大多数像素被分配在中灰度色区,如图1-21。
③选择“自动剪切变换”按钮。
图像再次增强,如图1-22。
④在“滤波”对话框中,从Edit菜单中,选择Delete this filter项。