proe参数化建模简介
proe参数化建模简介
proe参数化建模简介(1)本教程分两部分,第一部分主要介绍参数化建模的相关概念和方法,包括参数的概念、参数的设置、关系的概念、关系的类型、如何添加关系以及如何使用关系创建简单的参数化零件(以齿轮为例)。
第二部分介绍参数化建模的其他方法:如族表的应用、如何使用UDF(用户自定义特征)、如何使用Pro/Program创建参数化零件。
(后一部分要等一段时间了,呵呵)参数化设计是proe重点强调的设计理念。
参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。
参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。
关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。
所以,首先要了解proe中参数和关系的相关理论。
一、什么是参数?参数有两个含义:●一是提供设计对象的附加信息,是参数化设计的重要要素之一。
参数和模型一起存储,参数可以标明不同模型的属性。
例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。
●二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。
二、如何设置参数在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。
1.参数的组成(1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。
注意:用于关系的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。
(2)类型:指定参数的类型∙a)整数:整型数据∙b)实数:实数型数据∙c)字符型:字符型数据∙d)是否:布尔型数据。
(3)数值:为参数设置一个初始值,该值可以在随后的设计中修改(4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系统中可见(5)访问:为参数设置访问权限。
∙a)完全:无限制的访问权,用户可以随意访问参数∙b)限制:具有限制权限的参数∙c)锁定:锁定的参数,这些参数不能随意更改,通常由关系式确定。
ProE直齿、斜齿轮的参数化建模

摘要随着科技的发展,计算机辅助设计技术越来越广泛的应用在各个设计领域。
现在,它已经突破了二维图纸电子化的框架,转向以三维实体建模、动力学模拟仿真和有限元分析为主线的机械系统动态仿真技术。
其研究范围主要是机械系统运动学和动力学分析,核心是利用计算机辅助技术进行机械系统的运动学和动力学分析,以确定系统及其各构件在任意时刻的位置、速度和加速度,同时,通过求解代数方程组确定引起系统各构件运动所需的作用力和反作用力。
动态仿真技术一出现,就受到人们的普遍关注和重视,并且出现了许多基于动态方=仿真技术的商业软件,较有影响的有美国参数技术公司的PTC。
以Pro/MECHANICA为分析平台,运用有限元分析方法,对直齿轮、斜齿轮实际受力情况、边界条件和施加载荷进行研究。
运动分析模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或者缩短构件的力臂长度、修改凸轮型线、调整齿轮齿数比和中心距等)或者调整零件的材料(减轻或者加重或者增加硬度等)。
设计的更改可以直接反映在装配主模型的复制品分析方案(Scenario)中,再重新分析,一旦确定优化的设计方案,设计更改就可直接反映到装配主模型中。
将Pro/E三维实体造型与Pro/MECHANICA机构运动分析相结合,完成对连杆和凸轮机构的机构运动分析,及运动仿真。
加强对连杆和凸轮机构的认识与理解。
关键词: 直齿轮、斜齿轮; Pro/E 、Pro/MECHANICA; 运动仿真、有限元AbstractWith the development of technology, computer-aided design technology becomes more widely used in various design.Now, it has broken through the framework of two-dimensional drawings、 electronic、shift tothree-dimensional solid modeling, dynamic simulation and finite element analysis of the main line of the mechanical system dynamic simulation techniques.The major areas of its study kinematics and dynamics of mechanical systems, the core technology is the use of computer-aided kinematics and dynamics of mechanical systems analysis to determine the system and its components at any time of the position, velocity and acceleration at the same time,by solving algebraic equations determine the cause of the required system component moving action and reaction.Dynamic simulation appeared to be widespread concern and attention, and there were many parties = simulation based on dynamic business software, more influential technology companies of U.S. parameters PTC.To Pro / MECHANICA platform for analysis using the finite element method, on the spur gear, helical gear by the force of the actual situation, boundary conditions and applied load were studied.Motion analysis module analyzes institutional interference, tracking the trajectory of parts, parts of bodies in the speed, acceleration, force, reaction force and torque and so on.Motion analysis results of the analysis module to modify parts of the structure could guide design (longer or shorter moment arm length of the component, modify the cam, adjust the gear ratio and center distance, etc.) or adjust the parts of the material (to reduce or add to or increase the hardnessetc.).Design changes can be directly reflected in the assembly of copies of the master model program (Scenario), the re-analysis, Once optimized design, design changes can be directly reflected in the assembly of the main model.The Pro / E three-dimensional solid modeling and Pro / MECHANICA combined kinematic analysis, complete linkage and cam mechanism of the body motion analysis andmotion simulation.Connecting rod and cam mechanism to strengthen knowledge and understanding.Key words: spur gears, helical gears; Pro / E, Pro / MECHANICA; motion simulation, finite element摘要 (1)第一章绪论 (6)1.1、课题来源 (6)1.2、研究目的和意义 (6)1.3、国内外研究现状和发展趋势 (7)1.3.1 我国齿轮工业的概况 (8)1.3.2 中国齿轮工业的资本结构已成为三足鼎立的局面 (8)1.4、本课题的主要研究内容及拟采取的技术路线、试验方案 (8)1.4.1 预期达到的目标 (9)1.4.2 论文的结构 (9)第二章Pro/ENGINEER软件的应用和MECHNICA模块的应用 (10)2.1 PRO/MECHANICA简介 (10)2.1.1 PRO/MECHANICA模块介绍 (10)2.1.2 PRO/MECHANICA的工作模式 (11)2.1.3 使用PRO/MECHANICA的一般步骤 (11)第三章直齿轮与斜齿轮参数化设计造型 (12)3.1齿轮的基本参数、各部分的名称和尺寸关系 (12)3.1.1 直齿圆柱基本参数 (12)3.1.2 斜齿轮基本参数 (15)3.2 渐开线直齿轮参数化造型 (16)3.2.1 直齿轮参数化制作过程如下: (16)3.2.2 渐开线斜齿轮参数化造型 (18)第四章有限元优化设计 (22)4.1 有限元分析方法与原理 (24)4.1.1有限元分析 (24)4.1.2有限元的基本原理和特点 (25)4.1.3有限元网格生成技术 (26)4.1.3 网格划分举例 (27)第五章基于Pro/Mechanism直齿轮啮合、斜齿轮啮合过程中装配与运动仿真 (34)5.1 Pro/M的简介及其主要特性 (34)5.1.1 Pro/M的简介 (34)5.1.2 Pro/M的主要特性 (35)5.2 机构运动仿真的一般过程 (35)5.3 机械系统运动仿真的优越性 (37)5.4 Pro/E装配模块 (37)5.4.1 对于组装时,我们需要把握以下原则: (37)5.4.2 关于直齿轮机构的组装 (38)5.5 基于Pro/Mechanism直齿轮啮合、斜齿轮运动仿真 (40)5.5.1 运动定义及运动分析的一般步骤 (40)5.5.2 空间定轴轮系机构的运动分析 (43)5.5.3 定义齿轮从动连接结构 (43)5.5.4 添加驱动器 (44)5.5.5 运动分析 (44)5.5.6 图形结果分析 (44)第六章直齿轮、斜齿轮的静力学分析 (44)6.1 Pro/MECHANICA有限元分析的基本步骤: (44)6.2 Pro/MECHANICA STRUCTURE基本分析过程 (45)6.3 简单算例 (53)6.3.1 接触算例 (53)总结 (62)致谢 (63)阅读的主要文献、资料 (64)第一章绪论1.1、课题来源以往对于直齿、斜齿圆柱齿轮的三维造型建模很烦琐,但三维造型软件Pro/E突破性的解决了此问题。
ProE渐开线直齿轮的参数化建模
基于ProE5.0渐开线变位圆柱直齿轮的参数化设计引言参数化设计方法相对传统的方法最大的优点在于存储了设计的整个过程,能设计出一系列复杂多变的产品模型,比如齿轮、蜗轮蜗、丝杠、珠承等。
参数化设计最大的好处就是使工程人员通过改变几个参数就能生成一个系列中多种零件来,对设计人员来说减少了设计过程中不必要的重复劳动,提高了工作效率。
关于齿轮参数化设计的资料也不少,但大部分都是标准齿轮的设计,很少有渐开线变位齿轮的设计资料,本设计与以往不同的是:增加了齿轮变位系数参数,增加了齿顶圆、齿根圆与变位系数的关系式,从新调整参数方程,最终形成具有变位功能的齿轮实体模型。
本设计主要在三维工程软件pro/ENGINEER Wildfire5.0版本下进行,因为很少有以pro/ENGINEER Wildfire5.0版本为平台来介绍《渐开线变位圆柱直齿轮的参数化设计》的资料,随着新版本新技术的不断更新,越来越多的年轻技术人员更容易接受新版本,而在新版本中更容易接受新的知识,所以本设计选择了较高的设计版本,也是本设计追求原创的一个重要理由。
此设计也是本人在设计工作中的一部分浅薄的工作经验,拿出来和大家交流分享,希望大家给与批判指正。
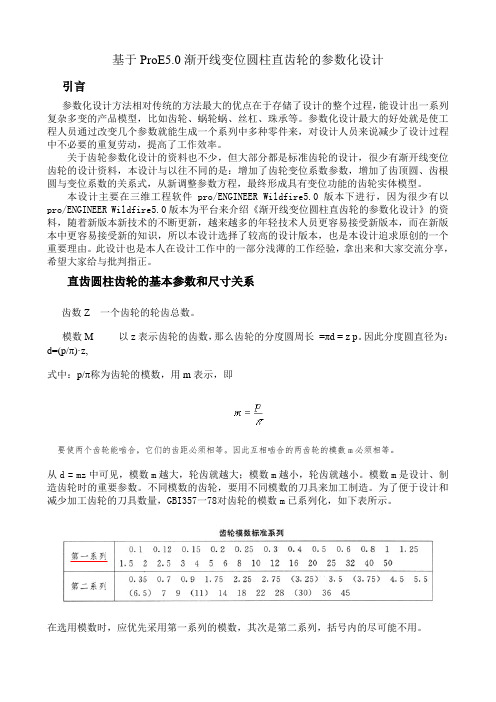
直齿圆柱齿轮的基本参数和尺寸关系齿数Z 一个齿轮的轮齿总数。
模数M 以z表示齿轮的齿数,那么齿轮的分度圆周长=πd = z p。
因此分度圆直径为:d=(p/π)·z,式中:p/π称为齿轮的模数,用m表示,即要使两个齿轮能啮合,它们的齿距必须相等。
因此互相啮合的两齿轮的模数m必须相等。
从d = mz中可见,模数m越大,轮齿就越大;模数m越小,轮齿就越小。
模数m是设计、制造齿轮时的重要参数。
不同模数的齿轮,要用不同模数的刀具来加工制造。
为了便于设计和减少加工齿轮的刀具数量,GBI357一78对齿轮的模数m已系列化,如下表所示。
在选用模数时,应优先采用第一系列的模数,其次是第二系列,括号内的尽可能不用。
基于PROE六自由度机械手参数化建模及运动仿真概论

基于PROE六自由度机械手参数化建模及运动仿真概论基于PRO/E(Pro/ENGINEER)六自由度机械手参数化建模及运动仿真(Introduction to Parametric Modeling and Motion Simulation of a Six Degree-of-Freedom Robot Arm Based on PRO/E)是一种基于 Pro/E 软件的机械手参数化建模方法和运动仿真技术的概念介绍。
机械手是一种能够执行预定动作的自动机器人系统,在工业领域被广泛应用。
参数化建模和运动仿真是机械手设计与验证的重要工具,可以提高设计效率和减少实验成本。
首先,本文介绍了 Pro/E 软件的基本原理和特点。
Pro/E 是一种三维 CAD(计算机辅助设计)软件,具有强大的参数化建模和运动仿真能力。
它可以通过调整参数来改变模型的形状和尺寸,以便满足不同的设计要求。
Pro/E 还提供了强大的运动仿真功能,可以模拟机械手在不同工况下的运动特性。
接下来,本文详细介绍了机械手的六个自由度,即机械手可以在三维空间中进行平移和转动的六个方向。
机械手的自由度决定了它的灵活性和工作范围。
参数化建模是在 Pro/E 软件中定义机械手的结构和参数,以便能够根据实际需求对机械手进行定制化设计。
然后,本文提出了一种基于 Pro/E 软件的机械手参数化建模方法。
通过定义机械手的几何尺寸、关节角度和连杆长度等参数,可以实现对机械手结构和工作范围的快速调整。
参数化建模可以大大加快机械手的设计过程,减少人工调整的工作量。
最后,本文介绍了基于 Pro/E 软件的机械手运动仿真技术。
通过给定关节的运动规律和工作环境的约束条件,可以模拟机械手在不同运动状态下的姿态和运动轨迹。
运动仿真可以帮助设计师评估机械手的性能和可靠性,并进行优化设计。
总结起来,基于 Pro/E 的六自由度机械手参数化建模和运动仿真技术是一种高效、准确和可靠的机械手设计方法。
proe参数化建模
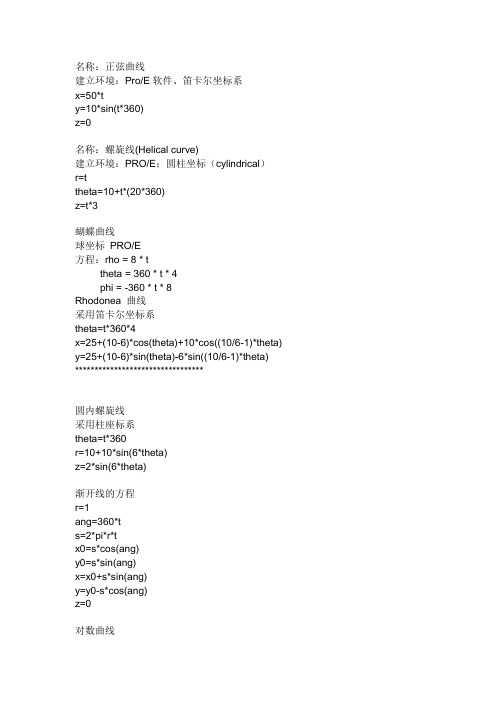
名称:正弦曲线建立环境:Pro/E软件、笛卡尔坐标系x=50*ty=10*sin(t*360)z=0名称:螺旋线(Helical curve)建立环境:PRO/E;圆柱坐标(cylindrical)r=ttheta=10+t*(20*360)z=t*3蝴蝶曲线球坐标PRO/E方程:rho = 8 * ttheta = 360 * t * 4phi = -360 * t * 8Rhodonea 曲线采用笛卡尔坐标系theta=t*360*4x=25+(10-6)*cos(theta)+10*cos((10/6-1)*theta) y=25+(10-6)*sin(theta)-6*sin((10/6-1)*theta)*********************************圆内螺旋线采用柱座标系theta=t*360r=10+10*sin(6*theta)z=2*sin(6*theta)渐开线的方程r=1ang=360*ts=2*pi*r*tx0=s*cos(ang)y0=s*sin(ang)x=x0+s*sin(ang)y=y0-s*cos(ang)z=0对数曲线z=0x = 10*ty = log(10*t+0.0001)球面螺旋线(采用球坐标系)rho=4theta=t*180phi=t*360*20名称:双弧外摆线卡迪尔坐标方程:l=2.5b=2.5x=3*b*cos(t*360)+l*cos(3*t*360)Y=3*b*sin(t*360)+l*sin(3*t*360)名称:星行线卡迪尔坐标方程:a=5x=a*(cos(t*360))^3y=a*(sin(t*360))^3名称:心脏线建立环境:pro/e,圆柱坐标a=10r=a*(1+cos(theta))theta=t*360名称:叶形线建立环境:笛卡儿坐标a=10x=3*a*t/(1+(t^3))y=3*a*(t^2)/(1+(t^3))笛卡儿坐标下的螺旋线x = 4 * cos ( t *(5*360))y = 4 * sin ( t *(5*360))z = 10*t一抛物线笛卡儿坐标x =(4 * t)y =(3 * t) + (5 * t ^2)z =0名称:碟形弹簧建立环境:pro/e圆柱坐r = 5theta = t*3600z =(sin(3.5*theta-90))+24*tpro/e关系式、函数的相关说明资料?关系中使用的函数数学函数下列运算符可用于关系(包括等式和条件语句)中。
PROE参数化教程

PROE参数化教程PROE是一款常用的三维设计软件,参数化是PROE中的一个重要功能,通过参数化,可以灵活地改变模型尺寸、形状、位置等属性,在设计中起到了十分重要的作用。
下面将介绍一些PROE参数化的基本使用方法和技巧。
1.定义参数在PROE中,我们可以使用“参数”功能来定义模型中的各种尺寸参数。
打开PROE软件后,选择“Insert”-“Datum”-“Point”创建一个点,然后在“Model Tree”视图中可以看到新创建的点。
选择该点,然后在工具栏中选择“Parameters”图标,弹出“Parameters”对话框。
在该对话框中,可以定义该点的尺寸参数。
比如,我们可以将该点的X轴值定义为“x”,Y轴值定义为“y”。
2.使用参数定义好参数后,我们可以在模型中使用这些参数。
例如,在创建一条直线时,可以将直线的长度定义为之前定义的参数。
选择“Insert”-“Datum”-“Line”,然后在属性栏中,将直线的长度值设置为之前定义的参数“x”。
这样,在模型中创建的直线的长度就会根据参数“x”的值来动态变化。
3.关系设置在进行参数化设计时,经常需要在不同的模型元素之间建立关系。
PROE中通过“关系”功能来实现这一点。
选择“Insert”-“Relations”,然后点击模型中两个元素,可以建立它们之间的关系。
例如,在建立两点之间的距离关系时,选择要建立关系的两个点,然后在属性栏中选择“Distance”关系类型,输入距离的值,点击确定,即可建立两点之间的距离关系。
4.公式使用在参数化设计中,经常需要使用一些复杂的公式来计算尺寸值。
PROE中使用公式功能可以实现这一点。
选择“Insert”-“Formula”,然后在公式对话框中输入公式,使用已经定义的参数和常量进行计算。
比如,我们可以定义一个参数“d”,然后通过公式计算出该参数的值为“2*x+y”。
5.参考尺寸使用在进行参数化设计时,有时需要参考模型中的一些尺寸值来定义其他的参数。
proe参数化草图绘制

解决方案
尝试使用不同的约束条件,或手 动添加约束条件
未来发展趋势
趋势一
01
更加智能化的参数设置和图形生成
趋势二
02
更加多样化的草图绘制工具和技巧
趋势三
03
更加广泛的应用领域和市场前景
05
proe参数化草图绘制与其他 软件的比较
与AutoCAD的比较
参数化程度
Pro/Engineer的参数化草图绘制相较于AutoCAD更为强大。Pro/Engineer基于 参数和特征的双向关联,可以快速进行修改和调整,而AutoCAD则需要手动调 整。
04
proe参数化草图绘制实践
实际应用案例分析
案例一
某机械零件的参数化设计
案例二
某电子产品的外观设计
案例三
某家具的定制化设计
常见问题及解决方案
问题一
参数设置不正确导致图形失真
解决方案
仔细核对参数设置,确保符合实 际需求
问题二
无法找到合适的约束条件
解决方案
调整参数或尝试不同的绘图工具 和技巧
问题三
建模效率
由于Pro/Engineer的参数化设计能力,其在建模效率上高于AutoCAD,特别是在 复杂形状的建模上。
与SolidWorks的比较
参数化程度
Pro/Engineer和SolidWorks在参数 化设计方面都很强大。但 SolidWorks更注重于装配建模,其 草图绘制功能相对Pro/Engineer稍 弱。
相切约束
用于将两个几何元素约束为相 切状态。
对齐约束
用于将两个几何元素约束为对 齐状态。
尺寸约束介绍
长度尺寸
PROE蜗轮蜗杆的参数化建模
PROE蜗轮蜗杆的参数化建模蜗轮蜗杆传动是一种常用的传动方式,在机械系统中有广泛的应用。
蜗轮蜗杆传动具有传递大扭矩的特点,能够将输入轴的高速运动转化为输出轴的低速高扭矩运动。
为了实现对蜗轮蜗杆传动的参数化建模,需要考虑蜗轮、蜗杆和传动比等参数。
首先,我们需要确定蜗杆的基础参数。
蜗杆是一种螺旋行星轮,具有螺旋齿。
蜗杆的主要参数包括螺旋角、导程、齿宽等。
螺旋角是蜗杆轴线上的螺旋线与轴线的夹角,导程是螺旋线的一个周期所对应的轴向长度。
齿宽是蜗杆螺旋线上的齿顶宽度。
这些参数的大小会直接影响蜗杆传动的传动效率和承载能力。
其次,我们需要确定蜗轮的基础参数。
蜗轮是与蜗杆啮合的齿轮,在蜗轮蜗杆传动中起到传递力矩和转速的作用。
蜗轮的主要参数包括齿数、模数、压力角等。
齿数是蜗轮上的齿的数量,模数是齿轮齿条上一个齿的尺寸。
压力角是齿轮齿条齿廓的斜率。
这些参数决定了蜗轮的几何形状和传动性能。
最后,我们需要确定蜗轮蜗杆传动的传动比。
传动比是指输入轴转速与输出轴转速之间的比值。
在蜗轮蜗杆传动中,传动比与蜗杆的导程和蜗轮的齿数之间有直接的关系。
传动比越大,输出轴的转速越低,扭矩越大。
传动比的选择需要考虑到机械系统的要求和设计要素。
了解了蜗轮、蜗杆和传动比等参数后,我们可以进行蜗轮蜗杆传动的参数化建模。
首先,确定蜗杆和蜗轮的基本参数,根据设计要求和传动比确定具体数值。
然后,根据蜗杆和蜗轮的参数,计算出蜗杆周速度、蜗轮周速度和传动比。
根据计算结果,可以进一步确定蜗轮蜗杆传动的传动效率、承载能力和传动精度。
在参数化建模的过程中,可以利用现代计算机辅助设计软件,通过数学模型和三维图形表示等方法,对蜗轮蜗杆传动进行仿真和分析。
通过仿真和分析,可以对蜗轮蜗杆传动的性能进行优化和改进。
通过参数化建模,可以实现对蜗轮蜗杆传动的快速设计和优化,提高传动效率和工作性能。
通过以上建模过程,可以实现对蜗轮蜗杆传动参数化建模。
这种建模方法可以提高设计效率,优化设计结果,满足机械系统对传动性能要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
proe参数化建模简介2010-05-21 22:18参数化设计是proe重点强调的设计理念。
参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。
参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。
关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。
所以,首先要了解proe中参数和关系的相关理论。
一、什么是参数?参数有两个含义:l一是提供设计对象的附加信息,是参数化设计的重要要素之一。
参数和模型一起存储,参数可以标明不同模型的属性。
例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。
l二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。
二、如何设置参数在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。
1.参数的组成(1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。
注意:用于关系的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。
(2)类型:指定参数的类型a)整数:整型数据b)实数:实数型数据c)字符型:字符型数据d)是否:布尔型数据。
(3)数值:为参数设置一个初始值,该值可以在随后的设计中修改(4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系统中可见(5)访问:为参数设置访问权限。
a)完全:无限制的访问权,用户可以随意访问参数b)限制:具有限制权限的参数c)锁定:锁定的参数,这些参数不能随意更改,通常由关系式确定。
(6)源:指定参数的来源a)用户定义的:用户定义的参数,其值可以随意修改b)关系:由关系式驱动的参数,其值不能随意修改。
(7)说明:关于参数含义和用途的注释文字(8)受限制的:创建其值受限制的参数。
创建受限制参数后,它们的定义存在于模型中而与参数文件无关。
(9)单位:为参数指定单位,可以从其下的下拉列表框中选择。
2.增删参数的属性项目可以根据实际需要增加或删除以上9项中除了“名称”之外的其他属性项目三、关系的概念关系是参数化设计的另一个重要因素。
关系是使用者自定义的尺寸符号和参数之间的等式。
关系捕获特征之间、参数之间或组件之间的设计关系。
可以这样来理解,参数化模型建立好之后,参数的意义可以确定一系列的产品,通过更改参数即可生成不同尺寸的零件,而关系是确保在更改参数的过程中,该零件能满足基本的形状要求。
如参数化齿轮,可以更改模数、齿数从而生成同系列、不同尺寸的多个模型,而关系则满足在更改参数的过程中齿轮不会变成其他的零件。
四、关系式的组成关系式的组成主要有:尺寸符号、数字、参数、保留字、注释等。
1.符号类型系统会给每一个尺寸数值创建一个独立的尺寸编号,在不同的模式下,被给定的编号也不同4)自定参数。
用户自定义的参数。
l使用者参数名必须以字母开头(如果它们要用于关系的话)。
l不能使用 d#、kd#、rd#、tm#、tp#、或tpm#作为使用者参数名,因为它们是由尺寸保留使用的。
l使用者参数名不能包含非字母数字字符,诸如!、@、#、$。
2.系统内缺省的常量(大小写视为相同)下列参数是由系统保留使用的:3.运算符号(算数、比较、逻辑)4.数学函数(大小写视为相同)下面简单介绍这些函数的用法:sin()、cos()、tan()函数这三个都是数学上的三角函数,分别使用角度的度数值来求得角度对应的正弦、余弦和正切值,比如:A=sin(30) A=0.5B=cos(30) B=0.866C=tan(30)C=0.577asin()、acos()、atan()函数这三个是上面三个三角函数的反函数,通过给定的实数值求得对应的角度值,如:A=asin(0.5) A=30B=acos(0.5) B=60C=atan(0.5) C=26.6sinh()、cosh()、tanh()函数在数学中,双曲函数类似于常见的(也叫圆函数的)三角函数。
基本双曲函数是双曲正弦“sinh”,双曲余弦“cosh”,从它们导出双曲正切“tanh”等。
sinh / 双曲正弦: sinh(x) = [e^x - e^(-x)] / 2cosh / 双曲余弦: cosh(x) = [e^x + e^(-x)] / 2tanh / 双曲正切: tanh(x) = sinh(x) / cosh(x)=[e^x - e^(-x)] / [e^x +e^(-x)]函数使用实数作为输入值sqrt()函数开平方,如:A=sqrt(100) A=10;B=sqrt(2)B=1.414...log()函数求得10为底的对数值,如:A=log(1) A=0;A=log(10) A=1;A=log(5)A=0.6989...;ln()函数求得以自然数e为底的对数值,e是自然数,值是2.718...;如:A=ln(1)A=0;A=ln(5) A=1.609...;exp()函数求得以自然数e为底的开方数,如:A=exp(2)A=e^2=7.387...;abs()函数求得给定参数的绝对值,如A=abs(-1.6) A=1.6B=abs(3.5) B=3.5max()、min()函数求得给定的两个参数之中的最大最小值,如A=max(3.8,2.5) A=3.8B=min(3.8,2.5) B=2.5mod()函数求第一个参数除以第二个参数得到的余数,如:A=mod(20,6) A=2B=mod(20.7,6.1) B=2.4pow()函数指数函数,如A=pow(10,2) A=100B=pow(100,0.5) B=10ceil()和floor()均可有一个附加参数,用它可指定舍去的小数位.ceil(parameter_name or number, number_of_dec_places).floor(parameter_name or number, number_of_dec_places).parameter_name or number:参数名或数值要保留的小数位(可省略) number_of_dec_places:要保留的小数位(可省略) ,它的取值的不同可有不同的结果:l可以为数值亦可为参数,若为实数则取整.l若number_of_dec_place>8, 则不作任何处理,用原值l若number_of_dec_place<8, 则舍去其后的小数位,则进位例如:Ceil(10.2)-->11 比10.2大的最小整数为11.floor(-10.2)-->-11 比-10.2小的最大整数为-11.floor(10.2)-->10比10.2小的最大整数为10.Ceil(10.255,2)-->10.26. 比10.255大的最小符合数.Ceil(10.255,0)-->11floor(10.255,1)-->10.2Len1=ceil(20.5) ==>Len1=21Len2=floor(-11.3) ==>Len2=-12Len=Len1+Len2 ==>Len=95.其他函数Proe中提供的函数很多,除上述数学函数外,还有许多函数,在此介绍几个字符串函数tring_length( ) :返回某字符串参数中字符的个数。
用法:String_length(Parameter name or string参数名或字符串例)如:strlen1=string_length("material") 则 strlen1=8若material="steel",strlen2=string_length(material),则strlen2=5rel_model_name( ):返回目前模型的名称用法:rel_model_name( ) 注意括号内为空的,返回目前模型名称.例:当前模型为part1,则 partName=rel_model_name( )==>partName="part1"如在装配图中,则需加上进程号(session Id),例如partName=rel_model_name:2( )rel_model_type( ) 返回目前模型类型用法: rel_model_type( )例:如当前模型为装配图 parttype=rel_model_type( ) ==>parttype="ASSEMBLY". itos( ) 将整数换成字符串用法:Itos(integer) 整数,若为实数则舍去小数点.例:S1=Itos(123)==>s1="123"S2=itos(123.57)==>s2="123"intl=123.5 s3=itos(intl)==>s3="123"search( ) 查找字符串,返回位置值用法:search(string,substring).string:原字符串substring:要找的字符串. 查到则返回位置,否则返回0,第一个字符位置值为1,依此类推.例 :Parstr=abcdef.则 Where=search(parstr,"bcd"")==>Where=2.Where=search(parstr,"bed")==>where=0(没查到).extract( ) 提取字符串用法:extract(string,position,length)string原字符串position提取位,大于0而小于字符串长度length提取字符数,不能大于字符串长度例:new=extraecl("abcded",2,3)==>new="bcd".其含义是: 从"abcdef"串的第2个字符(b)开始取出3个字符.exists( ) 测试项目是否存在用法:exists(Item)Item可以是参数或尺寸.例:If exists(d5) 检查零件内是否有d5尺寸.If exists("material") 检查零件内是否有material参数.evalgraph()计算函数用法:evalgraph(graph_name,x_value)其中graph_name是指控制图表(graph)的名字,要用双引号括起,x_value是graph中的横坐标值。