智能优化计算猫群算法ppt课件
多目标猫群算法求解切削参数优化问题
多目标猫群算法求解切削参数优化问题摘要:针对车床切削过程的复杂性,在充分考虑加工过程约束条件的基础上,建立了生产率、刀具耗损寿命和表面粗糙度的切削参数优化问题的数学模型。
推导和分析发现,目标函数和和分析切削参数约束条件都是关于进给量、切削速度和背吃刀量的方程和不等式,为优化奠定了良好的基础。
采用改进的多目标猫群算法进行优化,结果表明,该算法能有效求解切削参数优化问题。
关键词:切削参数优化;猫群算法;多目标优化0 引言合理选择切削参数能够降低生产成本,提高产品生产率和设备利用率。
然而,由于切削参数模型优化的复杂性,当前大多数工厂在生产中凭借经验或是参考相关手册来选取切削用量的值,为避免和尽可能地减少出现异常,一般都选取比较经验保守的数值,往往不会选择合理的切削参数,这不利于生产率的提高、生产成本的降低和零件产品质量的提高。
因此,对切削参数优化研究具有重要的理论价值和应用价值。
近年来,现代智能优化算法已成为研究切削参数优化的重要工具,目前采用较多的是遗传算法和粒子群优化算法。
上海交通大学的杨勇等、东北大学的李琦等分别研究了基于遗传算法的铣削、车削参数优化,华中科技大学的凌玲等研究了基于遗传算法的多种切削方式集成参数优化;北京航空航天大学的张青等、同济大学刘海江等分别以铣削、车削为例研究了基于粒子群算法的切削参数优化问题;武汉工程大学秦建华等将遗传算法和粒子群算法这两种生物仿生学的优化算法结合起来研究切削参数优化问题。
ShuChuan Chu受到猫日常行为动作的启发,于2006年提出了猫群算法。
猫群算法的最大特征表现为在进化过程中能够同时进行局部搜索和全局搜索,具有很好的收敛速度。
猫群算法独特的搜索结构,使得它拥有克服遗传算法局部搜索能力不足和粒子群算法求解离散问题时容易陷入局部最优点的能力。
猫群算法在连续函数优化和图像处理得到了良好的应用,证明了其较遗传算法和粒子群算法优异的算法性能,然而该算法尚未在切削参数优化中得到应用。
人工智能 第12章 群智能

经典TSP的数学模型为: min F dij xij i j
st..xij
➢ 蚂蚁-Q系统 1995年,意大利学者卢卡(M. Luca)、甘巴德拉(L. M. Gambardella)、 多里戈在ACO算法的基础上,进行了创新,提出了蚂蚁-Q系统。
▪①在解构造过程中提出了伪随机比例状态迁移规则; ▪②信息素局部更新规则引入强化学习中的Q学习机制; ▪③在信息素的全局更新中采用了精英策略。
12.2.2 蚁群算法的数学模型
蚁群优化算法的第一个应用是著名的旅行商问题。 旅行商问题(Traveling Salesman Problem,TSP): 在寻求单一旅行者由起点出发,通过所有给定的需求点之后,最后再回到 原点的最小路径成本。 蚂蚁搜索食物的过程 : 通过个体之间的信息交流与相互协作最终找到从蚁穴到食物源的最短路径。
ij t 1 1 ij t ij t
蚁群的信息素浓度更新规则为:
m
ij t
k ij
t
k 1
根据信息素更新策略不同,多里戈提出了3种基本蚁群算法模型。
✓ 1、蚁周系统(Ant-cycle System)
单只蚂蚁所访问路径上的信息素浓度更新规则为:
12.2.1 蚁群算法概述
蚂蚁是一种社会性生物,在寻找食物时,会在经过的路径上释放一种信 息素,一定范围内的蚂蚁能够感觉到这种信息素,并移动到信息素浓度 高的方向,因此蚁群通过蚂蚁个体的交互能够表现出复杂的行为特征。 蚁群的群体性行为能够看作是一种正反馈现象,因此蚁群行为又可以被 理解成增强型学习系统(Reinforcement Learning System)。
第六章 群智能算法II.ppt

最初提出的AS有三种版本:Ant-density、 Ant-quantity和Ant-cycle。在Ant-density和Antquantity中蚂蚁在两个位置节点间每移动一次后即 更新信息素,而在Ant-cycle中当所有的蚂蚁都完 成了自己的行程后才对信息素进行更新,而且每 个蚂蚁所释放的信息素被表达为反映相应行程质 量的函数。通过与其它各种通用的启发式算法相 比,在不大于75城市的TSP中,这三种基本算法 的求解能力还是比较理想的,但是当问题规模扩 展时,AS的解题能力大幅度下降。
蚁群算法在电信路由优化中已取得了一定的应用成 果。HP公司和英国电信公司在90年代中后期都开展了这 方面的研究,设计了蚁群路由算法(Ant Colony Routing, ACR)。
每只蚂蚁就像蚁群优化算法中一样,根据它在网络上 的经验与性能,动态更新路由表项。如果一只蚂蚁因为经 过了网络中堵塞的路由而导致了比较大的延迟,那么就对 该表项做较大的增强。同时根据信息素挥发机制实现系统 的信息更新,从而抛弃过期的路由信息。这样,在当前最 优路由出现拥堵现象时,ACR算法就能迅速的搜寻另一条 可替代的最优路径,从而提高网络的均衡性、负荷量和利 用率。目前这方面的应用研究仍在升温,因为通信网络的 分布式信息结构、非稳定随机动态特性以及网络状态的异 步演化与ACO的算法本质和特性非常相似。
1.4 蚁群优化算法研究现状
90年代Dorigo最早提出了蚁群优化算法---蚂 蚁系统(Ant System, AS)并将其应用于解决计 算机算法学中经典的旅行商问题(TSP)。
从蚂蚁系统开始,基本的蚁群算法得到了不 断的发展和完善,并在TSP以及许多实际优化问 题求解中进一步得到了验证。这些AS改进版本的 一个共同点就是增强了蚂蚁搜索过程中对最优解 的探索能力,它们之间的差异仅在于搜索控制策 略方面。而且,取得了最佳结果的ACO是通过引 入局部搜索算法实现的,这实际上是一些结合了 标准局域搜索算法的混合型概率搜索算法,有利 于提高蚁群各级系统在优化问题中的求解质量。
《蚁群算法介绍》课件

输出最优解和相关性能指标。
详细描述
这一步是将最优解和相关性能指标输出,以 便于对算法的性能进行分析和评估。
04
蚁群算法的性能分析
收敛性分析
收敛速度
蚁群算法在优化问题中的收敛速度取决于初始信息素分布、蚂蚁数量、迭代次数等因素 。
最优解质量
蚁群算法在某些问题上可能找到全局最优解,但在其他问题上可能只能找到近似最优解 。
VS
详细描述
这一步是生成初始解的过程,需要按照设 定的规则,将蚂蚁随机放置在解空间中, 并初始化每条路径上的信息素。
迭代优化
总结词
通过蚂蚁的移动和信息素的更新,不断优化 解的质量。
详细描述
这一步是蚁群算法的核心部分,通过模拟蚂 蚁的移动和信息素的更新机制,不断迭代优 化解的质量,最终找到最优解。
结果
多目标优化问题的蚁群算法
针对多目标优化问题,蚁群算法需要 进行相应的改进。
VS
多目标优化问题要求算法在满足多个 冲突目标的同时找到最优解。这需要 对蚁群算法进行相应的调整,以适应 多目标优化的特性。例如,可以通过 引入权重因子来平衡各个目标之间的 矛盾,或者采用非支配排序方法对解 进行分层处理,以便更好地处理多目 标优化问题。
蚁群算法的优化目标
寻找最短路径
蚁群算法的主要目标是找到起点到终 点之间的最短路径,这在实际应用中 可用于解决如旅行商问题、车辆路径 问题等优化问题。
平衡搜索与探索
蚁群算法需要在搜索和探索之间取得 平衡,以避免陷入局部最优解,提高 算法的全局搜索能力。
03
蚁群算法的实现步骤
问题建模
总结词
将实际问题抽象为蚁群算法能够解决的问题模型。
蚂蚁根据局部信息素浓度选择移动方向,倾向于选择信息素浓度较高的路径。
人工智能原理中群智能优化算法的内容以及过程
人工智能原理中裙智能优化算法的内容以及过程1. 概述人工智能是指智能机器的研究和设计,它包括了形式逻辑思维、学习和自然语言理解等各种能力。
随着科技的发展和进步,人工智能已经成为了当今社会中一个非常重要的领域。
而在人工智能的研究和应用中,裙智能优化算法起到着非常重要的作用。
在本文中,我们将会介绍人工智能原理中裙智能优化算法的内容以及过程。
2. 裙智能优化算法的概念裙智能优化算法是一种基于生物裙体行为的算法,其最初的灵感来源于自然界中的一些生物的裙体行为,例如蚁裙、鸟裙或者鱼裙等。
这些生物在裙体行为中表现出极强的自适应性和智能性,这也启发了研究者们去开发一些模拟这些生物裙体行为的优化算法。
裙智能优化算法可以通过模拟这些生物裙体行为来解决一些优化问题,例如寻优、函数逼近、组合优化等。
3. 裙智能优化算法的工作原理裙智能优化算法的核心思想是通过模拟生物裙体行为来解决优化问题。
在这些算法中,通常会涉及到一些基本的生物行为模型,例如蚁裙算法中的信息素模型、粒子裙算法中的裙体飞行模型等。
在算法的执行过程中,个体之间会进行信息交流或者相互作用,从而使得整个裙体能够逐步收敛到最优解。
在算法的每一次迭代中,个体会根据一定的规则进行位置或者速度的更新,从而使得整个裙体可以朝着最优解的方向前进。
4. 裙智能优化算法的主要内容在裙智能优化算法中,最为著名和常用的算法包括蚁裙算法、粒子裙算法、鱼裙算法和人工免疫算法等。
这些算法在不同的优化问题上都有着自己独特的优势和特点,因此在实际应用中得到了广泛的应用。
下面我们将对这些算法进行简要的介绍。
4.1 蚁裙算法蚁裙算法是一种通过模拟蚁裙寻找食物的行为来解决优化问题的算法。
在这个算法中,蚂蚁会根据信息素的浓度来选择路径,并且在选择路径之后会在路径上释放信息素。
通过这种方式,蚂蚁可以很快找到最优路径,并且这种最优路径也会被更多的蚂蚁选择。
4.2 粒子裙算法粒子裙算法是一种通过模拟鸟裙觅食的行为来解决优化问题的算法。
群体智能优化算法-猫群算法
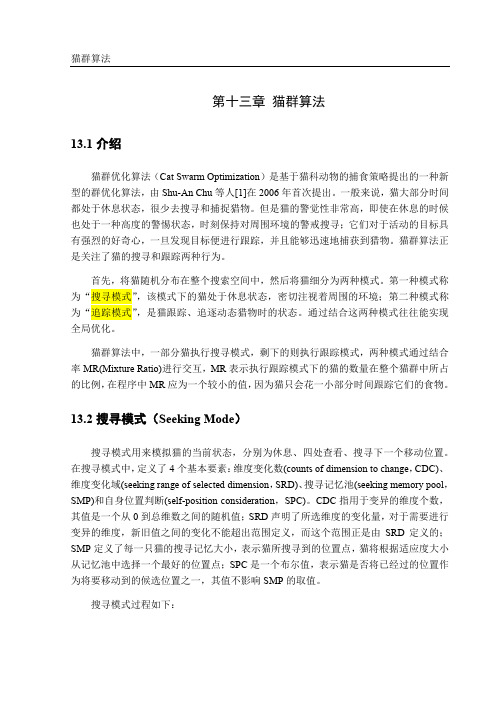
第十三章猫群算法13.1介绍猫群优化算法(Cat Swarm Optimization)是基于猫科动物的捕食策略提出的一种新型的群优化算法,由Shu-An Chu等人[1]在2006年首次提出。
一般来说,猫大部分时间都处于休息状态,很少去搜寻和捕捉猎物。
但是猫的警觉性非常高,即使在休息的时候也处于一种高度的警惕状态,时刻保持对周围环境的警戒搜寻;它们对于活动的目标具有强烈的好奇心,一旦发现目标便进行跟踪,并且能够迅速地捕获到猎物。
猫群算法正是关注了猫的搜寻和跟踪两种行为。
首先,将猫随机分布在整个搜索空间中,然后将猫细分为两种模式。
第一种模式称为“搜寻模式”,该模式下的猫处于休息状态,密切注视着周围的环境;第二种模式称为“追踪模式”,是猫跟踪、追逐动态猎物时的状态。
通过结合这两种模式往往能实现全局优化。
猫群算法中,一部分猫执行搜寻模式,剩下的则执行跟踪模式,两种模式通过结合率MR(Mixture Ratio)进行交互,MR表示执行跟踪模式下的猫的数量在整个猫群中所占的比例,在程序中MR应为一个较小的值,因为猫只会花一小部分时间跟踪它们的食物。
13.2搜寻模式(Seeking Mode)搜寻模式用来模拟猫的当前状态,分别为休息、四处查看、搜寻下一个移动位置。
在搜寻模式中,定义了4个基本要素:维度变化数(counts of dimension to change,CDC)、维度变化域(seeking range of selected dimension,SRD)、搜寻记忆池(seeking memory pool,SMP)和自身位置判断(self-position consideration,SPC)。
CDC指用于变异的维度个数,其值是一个从0到总维数之间的随机值;SRD声明了所选维度的变化量,对于需要进行变异的维度,新旧值之间的变化不能超出范围定义,而这个范围正是由SRD定义的;SMP定义了每一只猫的搜寻记忆大小,表示猫所搜寻到的位置点,猫将根据适应度大小从记忆池中选择一个最好的位置点;SPC是一个布尔值,表示猫是否将已经过的位置作为将要移动到的候选位置之一,其值不影响SMP的取值。
《蚁群算法》PPT

Thank you so much for your time,and have a nice day.
可选路径较少,使种群陷入局部最优。
信息素重要程度因子
蚂蚁选择以前已经走过的路可能性较大, 会使蚁群的搜索范围减小容易过早的收
容易使随机搜索性减弱。
敛,使种群陷入局部最优。
启发函数重要程度因子 虽然收敛速度加快,但是易陷入局部最优
蚁群易陷入纯粹的随机搜索,很难找到 最优解
信息素挥发因子
各路径上信息素含量差别较小,收敛速 信息素挥发较快,容易导致较优路径被排除 度降低
2.并行的算法
每只蚂蚁搜索的过程彼此独立,仅通过信 息激素进行通信。 在问题空间的多点同时开始进行独立的解 搜索,不仅增加了算法的可靠性,也使得算 法具有较强的全局搜索能力。
3
蚁群算法的基本步骤
1)初始化参数;2)构建解空间;3)更新信息素;4)判断终止与迭代。
3 蚁群算法的基本步骤
优化问题与蚂蚁寻找食物的关系
0.04
0.04
0.92 到城市1 到城市3 到城市5
3.3 更 新 信 息 素
蚂蚁访问完所有城市之后,进行信息素的更新。信息素的更新包括挥发和蚂蚁的产生,由以下 公式决定:
第 t+1 次 循 环 后 城 市 i 到 城市j上的信息素含量
信息素残留系数=1-信息素挥发因子
ij (t 1) (1 ) ij (t) ij , (0 1)
2.2 蚁 群 算 法 的 特 点
1.自组织的算法
自组织:组织力或组织指令是来自于系 统的内部。 在抽象意义上讲,自组织就是在没有外 界作用下使得系统嫡减小的过程(即是 系统从无序到有序的变化过程)。
《人工智能原理》-PPT P2C4-优化问题求解

人工智能原理
17
局部搜索方法
爬山法(Hill climbing)
爬山搜索往往被称为贪婪局部搜索(greedy local search),因为它只顾找到更好 的邻接点,而不考虑其它因素。
❖ “贪婪”已在第3章出现过。 ❖ 东汉著名文学家王逸对贪婪一词的注解是“爱财曰贪,爱食曰婪”。 ❖ 西方人则认为“greedy(贪婪)”是“seven deadly sins(七宗罪)”之一。七宗罪指的是:
❖ 图(b):皇后冲突数量降为h = 2。重复上述过程,将第三行第三列的皇后向下移动一格。
❖ 图(c):皇后之间冲突的数量降为h = 0,达到局部最优,停止局部搜索。
人工智能原理
19
爬山法的改进版本
随机爬山法(Stochastic hill climbing) 在爬山的过程中随机选择下一个状态 选择的概率随上爬的斜度而变化。 收敛速度相对较慢,但增大了找到全局最优的可能性。
特点 使用很少的内存 能够在状态空间中发现合理的解
人工智能原理
12
元启发式(Metaheuristic)
元启发式 基于客观约束条件或受自然现象的启发而形成的一类优化算法
特点 不依赖问题的特有条件、不做人为的假设,是一种通用的启发式 基于问题的客观约束条件、或模拟一些自然现象 通常用于解决优化问题中的不确定性、随机性和动态信息
最陡爬坡(Steepest Ascent)算法,每一步都用具有较高值的邻接点替换,否则即认为到达峰值。
人工智能原理
16
局部搜索方法
爬山法(Hill climbing)
爬山搜索算法是最基本的局部搜索方法,它常常会朝着一个解快速地进展,因而 很容易找到一个更好的状态。
由于初始状态的选取具有随机性,因此爬山法可以保证局部最优,但无法保证全局最优。 若搜索的范围进入“山肩”或“高原”,其状态则为若干局部最优解中的一个,而不是唯一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能优化算法
群体智能(Swarm Intelligence ) 算法
蚁群算法
粒子群优化算法
人工鱼群算法
混合虹跳算法
细菌觅食算法
猫群算法
群体智能算法应用
• 组合优化 • 图像处理
• 多口标优化 • 模式识别 • 数据分类 • 数据聚类 • 流程规划 • 系统辨识
猫群算法概述
跟踪模式过程描述
(1)速度更新。整个猫群经历过的最好位置,即目前搜索到的 最优解,记做 X best 。 { v , v , v } 每只猫的速度记做 v i i 1 i 2 id 每只猫根据公式(1)来更新自己的速度
i , d v ( t 1 ) v ( t ) r c ( X ( t ) x ( t )), (1) i , d best , d i , d
利用猫群算法求解流水车间调度问题
CSO算法相关参数设置为: 配比 MR=0.2 记忆池大小T=10 连续位置区间为[0,4] 速度区间为[-1,1] 变化域范围为[-1,1] ,8 变异率 p m 0 三种算法均独立运行20次,迭代次数为ioo代,种群规模均 为300
达到预设 迭代次数 计算适应度 保留最好的解
首先需要确定参与优化计 算的个体数,即猫的数量
数学描述
记忆池(SMP)定义了每一只 变化域(SRD)表示选择域的 猫的搜寻记忆大小,表示 变异率,搜寻模式中,每一 猫所搜寻到的位置点,猫 维的改变范围由变化域决定 将根据适应度大小从记忆 根据经验一般取值为 池中选择一个最好的位 0. 2 置点。 搜寻模式中的 4个基本要素 变化数(CDC)指每一 只猫将要变异的维数 的个数,其值是一个 从。到总维数之间的 随机值 自身位置判断(SPC) !是一个布尔值,表 示猫是否将已经过的 位置作为将要移动到 的候选位置之一,其 值不影响SMP的取值。
利用猫群算法求解流水车间调度问题
• 故工件j(j=1,2, …,n)在机器i(i=1,2, …,m)上 的完工时间C(i,j)可表示为:C(i,j)=max{C(i1,j),C(i,j-1)}+p(i,j) 式中:p(i,j)为工件.j在机器i上的加工时间。 • 问题的目标最优值 C 即是确定一个最优排序π 使 得最大完工时间 Cmax() 最小。
d 1 , 2 , M
vi,d (t 1 ) 表示更新后第i只猫在第d维的速度值,M为维数大小;
Xbest ,d (t)
表示猫群中当前具有最好适应度值的猫的位置
跟踪模式过程描述
xi,d (t ) 指当前第i只猫在第d维的位置
c是个常量,其值需要根据不同的问题而定 r是一个[0,1]之间的随机值。 (2)判断每一维的速度变化是否都在SRD内。给每一维的变 异加一个限制范围,是为了防止其变化过大,造成算法在 解空间的盲口随机搜索。SRD在算法执行之前给定,如果每 一维改变后的值超出了SRD的限制范围,则将其设定为给定 的边界值。 (3)位置更新。根据公式(2)利用更新后的速度来更新猫的位置 x ( t 1 ) x ( t ) v ( t 1 ), (2) i , d i . d i , d
搜寻模式过程描述
• (1)将当前位置复制J份副本放在记忆池中,j=SMP,即记忆 池的大小为j;如果SPC的值为真,令j=(SMP-1),将当前位 置保留为候选解。 • (2)对记忆池中的每个个体副本,根据CDC的大小,随机地 对当前值加上或者减去SRD%(变化域由百分率表示),并用 更新后的值来代替原来的值。 • (3)分别计算记忆池中所有候选解的适应度值 • (4)从记忆池中选择适应度值最高的候选点来代替当前猫 的位置,完成猫的位置更新。
利用猫群算法求解流水车间调度问题
本文采用广泛使用的用于测试算法性能的8个不同规模的F SP来ห้องสมุดไป่ตู้试猫群算法(CSO)的性能,这8个算例是由Carlier 设计,故也被称为Car问题。 本文用标准粒子群算法(PSO)和蝙蝠算法(BA)与CSO算法进 行测试比较,之所以选用PSO和BA,是因为PSO算法是一种 发展较早且已较成熟的群智能算法,而BA算法与CSO算法 同样是较新颖的算法,同时三种算法的机制有很多相似之 处。
猫群算法基本思想
猫即待求优 问题的可 行解
搜寻模式
跟踪模式
猫在懒散、环顾四周状 态时的模式称之为搜寻 模式 跟踪动态目标时的状态 称之为跟踪模式。
猫群算法 思想
搜寻模式
跟踪模式
猫群算法步骤
之后再根据结合率随机地将猫群分为搜寻 部分和跟踪部分的猫,以此方法进行迭代 计算直到达到预设的迭代次数 当猫进行完搜寻模式和跟踪模式后,根 据适应度函数计算它们的适应度并保留 当前群体中最好的解。最短时间控制等 每只猫的属性、每一维的速度、对 基准函数的适应值及表示猫是处于 搜寻模式或者跟踪模式的标识值
• 猫群算法(Cat Swarm Optimization ,缩写为CSO)是由S hu-An Chu等人在2006年首次提出来的一种基于猫的行 为的全局优化算法 • 根据生物学分类,猫科动物大约有犯种,例如:狮子、老 虎、豹子、猫等。尽管生存环境不同,但是猫科动物的 很多生活习性非常相似。 • 猫的警觉性非常高,即使在休息的时候也处于一种高度 的警惕状态,时刻保持对周围环境的警戒搜寻;它们对于 活动的口标具有强烈的好奇心,一旦发现口标便进行跟 踪,并且能够迅速地捕获到猎物。 猫群算法正是通过将猫的搜寻和跟踪两种行为结合起来, 提出的一种解决复杂优化问题的方法
d 1 , 2 , ,M
) 表示第i只猫更新后的位置。 式中 xi (t 1
算法流程
利用猫群算法求解流水车间调度问题
• 流水车间调度是要确定n个工件在m台机器上的加工顺序 ,使得所有工件在机器上的总流经时间达到最小。同时 此模型应满足如下的约束。 • 1)同一时刻一台机器只能加工一个工件,且一个工件只 能由一台机器加工。 • 2)所有工件在机器上加工的顺序相同。 • 3)每个工件在各机器上的准备时间和加工时间给定。 • 4)每个工件必须被所有机器加工,且仅加工一次。 • 5)工件可以在机器间无限等待。