霍尔传感器直线电机位置检测
基于线性霍尔元件的圆筒型永磁直线同步电机位置检测

基于线性霍尔元件的圆筒型永磁直线同步电机位置检测
徐丽莉;叶云岳
【期刊名称】《微电机》
【年(卷),期】2007(40)3
【摘要】圆筒型直线永磁同步电机是一种新型的直线电机.分析了该电机的结构和几种不同的位置检测技术.通过比较,提出了一种新的基于线性霍尔元件的位置检测技术.通过样机试验表明,该检测方法具有较好的稳定性和精确度.该方法适用于直线电机的速度和加速度检测场合中.
【总页数】3页(P23-25)
【作者】徐丽莉;叶云岳
【作者单位】浙江大学,电气工程学院,杭州,310027;浙江大学,电气工程学院,杭州,310027
【正文语种】中文
【中图分类】TM359.4
【相关文献】
1.圆筒型永磁直线同步电机用线性霍尔位置检测的误差补偿 [J], 严乐阳;叶佩青;张勇;张辉
2.永磁同步电机用线性霍尔位置检测的误差补偿 [J], 刘刚;肖烨然;宋欣达
3.基于线性霍尔元件的准无位置传感器伺服系统设计 [J], 谢宏亮
4.基于线性型霍尔元件的伺服定位控制与仿真 [J], 李丽霞
5.基于线性霍尔误差补偿的高速永磁同步电机转子位置检测技术 [J], 王晓琳;刘思豪;顾聪
因版权原因,仅展示原文概要,查看原文内容请购买。
直线电机霍尔传感器工作原理
直线电机霍尔传感器工作原理说起直线电机霍尔传感器工作原理,我有一些心得想分享。
你看,咱们生活中有很多东西都是靠感应来工作的。
就像自动感应的水龙头,手一放过去,水就出来了,和直线电机霍尔传感器其实有着相似的地方呢。
那这个直线电机霍尔传感器到底是怎么感应的呢?先得讲讲啥是霍尔效应。
霍尔效应简单来说就是当电流垂直于外磁场通过半导体时,载流子发生偏转,垂直于电流和磁场的方向会产生一个电场,这个电场就叫霍尔电场。
这就好像一群人(载流子)本来沿着一条路(电流方向)走得好好的,突然一阵大风(磁场)把他们吹偏了,于是在旁边就挤出来了一个小道(霍尔电场)。
直线电机霍尔传感器就是利用这个霍尔效应来工作的。
在直线电机里,它就像是一个敏锐的小侦探。
当有变化的磁场靠近的时候,传感器里面的半导体材料就会发生霍尔效应,产生霍尔电压。
这个电压的大小和磁场的强度、方向等有关系。
有意思的是,通过检测这个霍尔电压,就能够知道直线电机里面永磁体的位置啦。
这对于直线电机的控制来说非常重要。
打个比方,就像开车的时候要知道车轮的位置一样。
如果不知道的话,直线电机就可能没办法正常工作,就像车失去了方向。
不过,老实说,我一开始也不明白为啥这个小小的传感器能这么精确地检测磁场信息。
后来查阅资料加上自己琢磨才懂得。
实际应用可多了,像那种高精度的自动化生产设备中的直线电机,像激光切割设备等就是靠它来精确控制电机运动。
说到这里,你可能会问,那要是磁场受到干扰了怎么办?这就是个要注意的点。
周围的一些强磁场源或者导磁材料可能会影响霍尔传感器的工作。
所以在使用的时候得考虑好它的安装位置呀。
这也算是直线电机霍尔传感器原理带来的一种思考延伸吧,关于怎么确保它准确可靠地工作始终是一个值得讨论的问题。
大家有没有遇到和这个原理相关的有趣的事情或者困惑呀?欢迎一起讨论分享。
一种永磁直线同步电机初始相位检测新方法
第24卷 第7期2017年7月仪器仪表用户INSTRUMENTATIONEIC Vol.242017 No.7一种永磁直线同步电机初始相位检测新方法李振宇1,张文涛1,张志钢2,程国苗2(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541000;2.上海微电子装备(集团)股份有限公司 精密运动工程部,上海 201203)摘 要:文章首先分析了目前常用的磁场相位对准方式及其缺点,在此基础上提出了一种改进的脉冲振荡对相程序法。
该方法主要是将线圈的一个通电周期分成四拍,改变各拍的输入电流的幅值和相位,按照二分法原则将电流相位依次减小原来的一半,幅值的大小确保能够克服摩擦力,通过检测电机运动状态,由三相电机出力方程就可以得出磁场相位。
实验数据显示,该方法可实现相位对准精度达0.02°,最大绝对偏差小于0.024°。
在永磁直线同步电机的高精密运动控制中具有重要意义。
关键词:永磁直线同步电机;初始相位;精密运动控制中图分类号:TP273 文献标志码:AA New Method to Detect Initial Phase of Permanent Magnet LinearSynchronous Motor (PMLSM)Li Zhenyu 1, Zhang Wentao 1, Zhang Zhigang 2, Cheng Guomiao 2(1. School of electronic engineering and automation, Guilin University of Electronic Technology, Guangxi, Guilin, 541000, China;2. Precision Motion Engineering Department, Shanghai Micro Electronics Equipment (Group) CO.LTD, Shanghai, 201203, China)Abstract:At first, common magnetic field phase alignment methods and their shortcomings were analyzed in this paper. On this basis, a programmed phase alignment based on impulse oscillation was put forward. As to this method, a power cycle of rotor coil is divided into four periods. Change amplitude and phase of input current of each period, reduce current phase by half under dichot-omy, and ensure the amplitude is great enough to overcome the friction. By detecting motor’s motion state, magnetic field phase can be obtained via three-phase motor output equation. Experimental data shows that the method can achieve a phase alignment accuracy of 0.02°, the maximum absolute deviation is below 0.024° and this has a great significance to high-precision motion control of PMLSM.Key words:permanent magnet linear synchronous motor;initial phase;precision motion controlDOI:10.3969/j.issn.1671-1041.2017.07.004文章编号:1671-1041(2017)07--0015-040 引言永磁直线同步电机(Permanent Magnet Linear Synchronous Motor, PMLSM) 因其省去了旋转电机中旋转运动向直线运动的转变过程,可直接实现直线运动,而且具有推力大、可靠性高等优点,从而为现代工业中的高速、高精度伺服控制提供了理想的解决方式[1,2]。
无刷电机霍尔检测方法

无刷电机霍尔检测方法
无刷电机是一种高效、可靠、精确控制的电机,被广泛应用于工业自动化、航
空航天、汽车等领域。
在无刷电机中,霍尔传感器是一种常用的检测方法,用于监测电机转子的位置和速度,并向控制系统提供反馈。
无刷电机霍尔检测方法基于霍尔效应,其中霍尔传感器主要包括霍尔元件和磁
场源。
磁场源产生一个恒定的磁场,而霍尔元件则感测由转子磁极产生的磁场变化。
在无刷电机中,通常使用三个霍尔传感器。
这三个传感器固定在电机的定子上,且夹角相互偏移120度。
当转子旋转时,每个磁极会在霍尔传感器上产生一个磁场变化,从而产生一个脉冲信号。
通过检测这些脉冲信号的顺序和间隔时间,可以确定转子的位置和速度。
为了提高精确度和准确性,无刷电机霍尔检测方法通常还通过插值技术来进行
精细测量。
插值技术利用脉冲信号的边沿来进行更细致的位置和速度测量。
通过高精度的插值器,可以将脉冲信号的分辨率提高到更高的级别,从而提高无刷电机的控制精度和稳定性。
除了位置和速度检测外,无刷电机霍尔检测方法还可以用于故障诊断和保护。
通过监测脉冲信号的频率和幅值,可以检测电机的异常运行情况,如过载、故障等,并及时采取相应的措施,以防止进一步损坏电机或降低工作效率。
总之,无刷电机霍尔检测方法是一种重要的技术,用于监测无刷电机转子的位
置和速度,提高电机的控制精度和稳定性,以及实现故障诊断和保护。
随着科技的不断进步,无刷电机霍尔检测方法将进一步发展和完善,为各个领域的应用提供更高效、可靠的解决方案。
一种高速直线电机的位置和速度检测系统及方法
一种高速直线电机的位置和速度检测系统及方法说实话一种高速直线电机的位置和速度检测系统及方法这事,我一开始也是瞎摸索。
我试过好多种不同的传感器来检测直线电机的位置呢。
最开始我想到的是用光电传感器,想着光嘛,一遮一断就能知道电机动没动,位置在哪了。
但是实际操作起来啊,发现好多问题。
比如说,高速直线电机运行的时候震动比较大,这个光电传感器就很容易被干扰,误判位置的情况时有发生,就好像你想靠一个不太靠谱的眼睛去精确看东西,眼睛还老是看错,可把我愁坏了。
后来我又试了电磁感应传感器。
这个原理我稍微懂一点,就是根据电磁感应嘛。
但是怎么设置感应的强度啊,距离啊,又是个大难题。
我是一遍又一遍地调整参数,就像调收音机一样,一点点地找那个最清晰的台,折腾了好久。
有时候感应太弱了,根本检测不到数据,有时候又太强,数据全乱套了。
再后来,我就深入研究了一些现有的检测方法。
有个办法是利用霍尔效应。
我感觉这个挺靠谱的,就开始按照这个方向死磕。
先了解霍尔元件的特性,这就好比去摸透一个人的脾气一样,知道什么样的情况下它能给你最准确的信息。
然后就是设计电路,要把霍尔元件和其他电路部分结合起来可没那么简单。
电路里面的布线啊,就像是给城市规划道路,一不小心哪里堵了或者断了,整个系统就不能正常工作。
我还犯过一个很愚蠢的错误,把正负极给接反了,白白忙乎了半天,还以为是电路设计有毛病呢,最后才发现是这么个低级错误,当时那个懊恼啊。
速度检测方面呢,和位置检测还有点关联。
我发现根据位置数据进行计算进而得到速度是个可行的办法。
就像是你知道一个人在两个点之间的距离,也知道他走这两个点花的时间,就可以算出他的速度一样。
所以就把位置检测得到的数据进行时间间隔上的处理。
当然这中间也要注意数据的准确性,不能因为前面位置检测错了,导致速度也跟着错。
我还想过有没有可能单独设计一个速度检测的模块,和位置检测分开,但是这样的话成本会增加很多,系统也会更复杂,有点得不偿失啊。
无刷电机的检测霍尔好坏检测
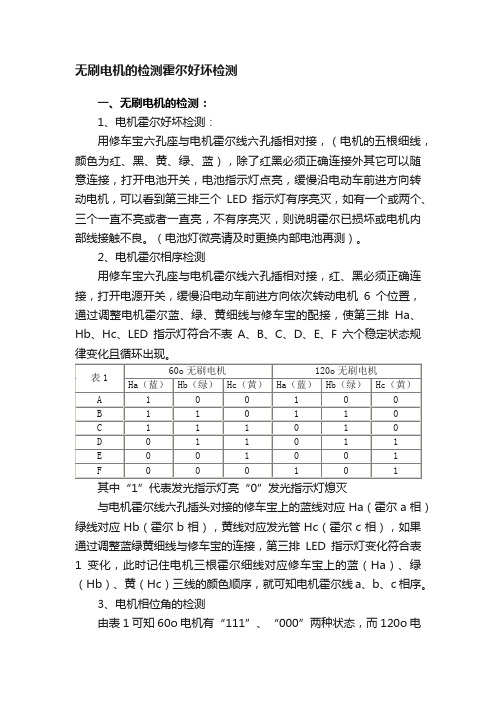
无刷电机的检测霍尔好坏检测一、无刷电机的检测:1、电机霍尔好坏检测:用修车宝六孔座与电机霍尔线六孔插相对接,(电机的五根细线,颜色为红、黑、黄、绿、蓝),除了红黑必须正确连接外其它可以随意连接,打开电池开关,电池指示灯点亮,缓慢沿电动车前进方向转动电机,可以看到第三排三个LED指示灯有序亮灭,如有一个或两个、三个一直不亮或者一直亮,不有序亮灭,则说明霍尔已损坏或电机内部线接触不良。
(电池灯微亮请及时更换内部电池再测)。
2、电机霍尔相序检测用修车宝六孔座与电机霍尔线六孔插相对接,红、黑必须正确连接,打开电源开关,缓慢沿电动车前进方向依次转动电机6个位置,通过调整电机霍尔蓝、绿、黄细线与修车宝的配接,使第三排Ha、Hb、Hc、LED指示灯符合不表A、B、C、D、E、F六个稳定状态规律变化且循环出现。
与电机霍尔线六孔插头对接的修车宝上的蓝线对应Ha(霍尔a相)绿线对应Hb(霍尔b相),黄线对应发光管Hc(霍尔c相),如果通过调整蓝绿黄细线与修车宝的连接,第三排LED指示灯变化符合表1变化,此时记住电机三根霍尔细线对应修车宝上的蓝(Ha)、绿(Hb)、黄(Hc)三线的颜色顺序,就可知电机霍尔线a、b、c相序。
3、电机相位角的检测由表1可知60o电机有“111”、“000”两种状态,而120o电机则没有,只有“010”、“101”两种状态,因此无刷电机检测时三个LED指示灯出现同时亮,同时灭此电机为60o,否则为120o电机。
4、电机绕组的检测:检测电机绕组不需打开电池开关,用修车宝连接好电机三根粗相线,然后转动电机,可以看到第四排XA(蓝)XB(绿)XC(黄)三个LED指示灯点亮且闪烁即正常,如果一个、二个、三个LED指示灯不亮即为这一组绕组有故障或接触不良,接着短接电机三根粗线,电机应有均匀的电磁阻力,无卡阻现象,断开了3根粗线,正反转也应无卡阻现象,如正反均有电磁阻力判断为绕组短路。
二、无刷控制器及相位角的检测:检测无刷控制器不需打开修车宝电池开关,把控制器霍尔信号六孔插座与修车宝控制器霍尔六孔插头相连接,把控制器上黄、绿、蓝三根主相线分别与本修车宝控制器主相线三个黄、绿、蓝鳄鱼夹线连接,另需断开控制器上的转速信号线与转速表连接的插头,否则有可能馈电影响检测效果。
霍尔传感器直线电机位置检测

霍尔传感器直线电机位置检测电流检测部分本控制系统中永磁直线电机的两相电枢电流通过霍尔电流传感器得到,另外一相电流通过计算得到。
电流传感器采用LEM公司生产的LTSR -6-NP型电流传感器,该产品具有高精度,高线性度,高响应速度,高频率带宽,高电流过载能力,低温漂,低接入损耗,以及对外部信号的高抗干扰能力,非常适合在永磁电机伺服系统中使用。
根据选择不同的引脚接法,该产品可以提供三种不同的额定采样电流值,分别为2A、3A和6A电流有效值,对应的最大采样电流值分别为6.4A,9.6A 和19.2A。
由于该传感器输出电压范围为0.5~4.5V,而TMS320LF240DSP的AD输入信号只能在0V—+3.3V之间,所以需要将传感器的输出电压经过运放电路处理后,再输入DSP的AD口,具体电路如图4—10所示.一种低成本的线性霍尔位置检测方法在永磁直线电机伺服控制系统中,无论采用何种控制方式,都需要准确检测出电机动子位置。
可以说,位置检测部分是伺服控制系统中非常关键的组成部分,直接影响着电机控制精度和系统运行性能。
目前,在直线运动控制系统中,最常见的位置检测方法是采用直线光栅,但是光栅的成本很高,对安装要求也很高;也有增加额外机械结构,将直线运动转变成旋转运动,然后用旋转编码器进行位置检测的方法,显然该方法在成本和精度上都存在缺点;还有采用无位置检测的方法,但是目前所有无位置检测方法的在电机低速段效果都不是很理想,而直线电机恰恰需要频繁的起动和停止,采用无位置检测方法获得理想的效果难度较大,尚未有实用的解决方案提出。
因此,本节将介绍一种低成本的利用线性霍尔元件对永磁直线电机进行位置检测的方法。
§4.6.1线性霍尔位置检测方法的基本原理线性霍尔元件可以用来检测磁通密度,在一定磁场强度范围内,其输出电压与被检磁场磁通密度成线性关系.永磁直线同步电机气隙磁场为正弦分布,因此很容易通过检测气隙磁场磁通密度的方法来确定电机动子的位置。
电机霍尔的检测方法
电机霍尔的检测方法
嘿,朋友们!今天咱来聊聊电机霍尔的检测方法呀!这可真是个超级重要的事儿呢!
电机霍尔就像是电机的小眼睛,能帮我们更好地了解电机的工作状态。
那怎么检测它呢?咱可以用万用表呀!就像医生用听诊器给病人看病一样,万用表就是我们检测电机霍尔的好帮手。
把万用表调到合适的档位,然后去测量霍尔的引脚,看看有没有正常的电压输出。
这不是很神奇吗?
还有啊,我们可以通过观察电机的转动情况来判断霍尔是否正常工作。
如果电机转动不顺畅,或者有卡顿的现象,那是不是就像人走路一瘸一拐的,很可能就是霍尔出问题啦!这就好比一辆汽车,如果发动机出了毛病,那肯定跑不起来呀!
我们还可以用专门的霍尔检测仪器呢!这仪器就像是个高级侦探,能更精确地找出霍尔的问题所在。
把电机接到检测仪器上,它就能快速准确地给出结果。
哇塞,是不是感觉特别厉害!
难道我们就只能用这些方法吗?当然不是啦!还可以结合实际情况去创新检测方法呀!比如说,我们可以在不同的工作环境下测试电机霍尔,看看它的适应能力怎么样。
这就跟人一样,在不同的环境中表现也会不一样呢!
总之呢,检测电机霍尔的方法有很多,我们要根据具体情况选择合适的方法。
就像我们穿衣服一样,要根据天气和场合来选择。
只有这样,我们才能更好地保证电机的正常运行,让它为我们发挥更大的作用。
所以呀,大家可一定要重视电机霍尔的检测哦!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电流检测部分
本控制系统中永磁直线电机的两相电枢电流通过霍尔电流传感器得到,另外一相电流通过计算得到。
电流传感器采用LEM公司生产的LTSR -6-NP型电流传感器,该产品具有高精度,高线性度,高响应速度,高频率带宽,高电流过载能力,低温漂,低接入损耗,以及对外部信号的高抗干扰能力,非常适合在永磁电机伺服系统中使用。
根据选择不同的引脚接法,该产品可以提供三种不同的额定采样电流值,分别为2A、3A和6A电流有效值,对应的最大采样电流值分别为6.4A,9.6A 和19.2A。
由于该传感器输出电压范围为0.5~4.5V,而
TMS320LF240DSP的AD输入信号只能在0V—+3.3V之间,所以需要将传感器的输出电压经过运放电路处理后,再输入DSP的AD口,具体电路如图4—10所示.
一种低成本的线性霍尔位置检测方法在永磁直线电机伺服控制系统中,无论采用何种控制方式,都需要准确检测出电机动子位置。
可以说,位置检测部分是伺服控制系统中非常关键的组成部分,直接影响着电机控制精度和系统运行性能。
目前,在直线运动控制系统中,最常见的位置检测方法是采用直线光栅,但是光栅的成本很高,对安装要求也很高;也有增加额外机械结构,将直线运动转变成旋转运动,然后用旋转编码器进行位置检测的方法,显然该方法在成本和精度上都存在缺点;还有采用无位置检测的方法,但是目前所有无位置检测方法的在电机低速段效果都不是很理想,而直线电机恰恰需要频繁的起动和停止,采用无位置检测方法获得理想的效果难度较大,尚未有实用的解决方案提出。
因此,本节将介绍一种低成本的利用线性霍尔元件对永磁直线电机进行位置检
测的方法。
§4.6.1线性霍尔位置检测方法的基本原理
线性霍尔元件可以用来检测磁通密度,在一定磁场强度范围内,其输出电压与被检磁场磁通密度成线性关系.永磁直线同步电机气隙磁场为正弦分布,因此很容易通过检测气隙磁场磁通密度的方法来确定电机动子的位置。
本节以空心式圆筒型永磁直线电机为例,具体介绍该方法。
电机及霍尔元件的安装位置示意图如图4—18所示.因为电机只沿Z轴方向做运动,所以只需要检测电机动子在z轴上的位置。
在第三章中,已经分析了该电机气隙磁密Br,沿Z轴基本成正弦分布,在一对极范围内,也就是一个周期内,Br不是Z的单值函数,因此不
能只用一个霍尔元件来唯一确定电机的位置,至少要使用两个霍尔元件来进行检测。
在安装两个霍尔元件时应满足以下条件:
(1)两个霍尔元件r轴方向保持水平;
(2)两个霍尔元件Z轴方向间距为二分之一极距,即τ/2.
该方法的基本工作原理如图4—19所示.因为电机的空载气隙磁密耳沿Z轴成正弦分布,那么,当电机动子运动经过一个极距的距离时,霍尔元件的输出电压也同样是正弦曲线.图4—19中的正弦曲线既是磁密耳的分布曲线,也可以理解为霍尔元件的输出电压曲线。
假设某个时刻,电机A相绕组轴线与图4—19中原点位置重合,霍尔元件a、b与A相绕组轴线的距离分别为z a和z b,且z b=z a+τ/2。
此时两个霍尔元件的输出电压分别为U a和U b,由于两个霍尔元件在安装位置上相差了90度的电角度,则U a和U b可以分别表示为,
U a=U m sinθl
U b=U m COSθl
θl——霍尔元件a位置的电角度;
U m——对应最大磁密时,霍尔元件的输出电压。