PMAC下直线电机定位精度分析与误差补偿技术
电机控制技术论文集

电机控制技术论文集电机应用于消费电子、住宅、工业、通用、交通和农业等领域。
下面小编给大家分享一些电机控制技术论文集,大家快来跟小编一起欣赏吧。
电机控制技术论文篇一基于PMAC的电机控制技术研究【摘要】随着科学技术的不断发展,工业水平的不断提升,在世界范围内的先进控制技术得到了很大的提升。
在以往的电机控制中,由于控制器的控制能力有限,使得被控对象在运行时有很大的误差产生,而以PMAC为核心控制器的电机运行设备具有更高的控制能力。
本文在对PMAC运动控制器及直线电机原理进行概述的基础上,重点研究PMAC控制器在直线电机PID调节中的应用,并以具体的实验进行验证。
【关键词】PMAC,PID,直线电机1.引言当今社会,自动控制技术和微型计算机作为高科技时代的领导者,更加严格要求各种自动控制系统的定位精准度,由此,在传统旋转电机的基础上配备一套变换机构而构成的直线运动驱动装置,已难以满足当代控制系统愈发精准的要求,因此直线电机的研究、发展与应用工作成为世界各国当今的发展方向,促使直线电机具有越来越开扩的应用领域。
2.PMAC控制器简介上世纪九十年代,美国Delta Tau公司研发了一种开放式多轴运动控制器,命名为PMAC(Programmable Multi-axis Contro-ller)。
PMAC是具有高性能的伺服控制器,其核心为DSP,它可借助高级语言灵活的控制最多八轴同时运行,还能提供内务处理、运动控制、离散开展、同主机交互等功能。
PMAC是一台完整的可以任务识别的计算机,能自动进行任务等级识别,将高优先级的任务比低优先级的任务先进行操作。
其执行速度、分辨率等指标均高于普通的控制器。
伺服控制分为PID加Notch 和速度、加速度前馈控制。
可与MACRO现场总线的高速环网相连接,直接灵活的对生产线实施控制。
相对于其他运动控制器,PMAC的开放性最为突出。
其内部寄存器可允许用户按照自身需要来使用。
PMAC的A/D和I/O和内部寄存器都是统一编址,A/D和I/O的用法与PMAC其它内存用法相同,具有很强的便利性。
基于PMAC开放式数控系统的定位精度控制

・
控 制 与检 查 ・
组合机床与自 动化加工技术
文 章 编 号 :0 1 2 6 ( 0 8 0 0 3 0 10 — 2 5 2 0 ) 3— 0 8— 4
基于 P A M C开 放式数控 系统的定位精度控制
张 生 芳 。 , 永 青 。康 仁 科 。 ’王 ,
(. 1 大连理 工 大 学 精 密与特 种加 工教 育部 重 点 实验 室, 宁 大连 l 6 2 ; . 辽 0 3 2 大连 交通 大学 机 械工 程 学 1 院, 宁 大连 l6 2 ) 辽 10 8 摘 要 : 服控 制 方法是 影响 机床 定位 精 度 的 关键 因素 之 一 , 保证 数 控 系统 的 高定 位精 度 , 采 用合 理 伺 要 应
u ain,D l n La nn 1 0 3; . c o lo c a ia n ie r g,D l nJa tn ies y ct o ai io ig 1 2 2 S h o fMe h nc l gn ei a 6 E n ai ioo gUnv ri ,D l n L- a t ai i a
a c r c m pr vig m e h d o heo n g CN C yse b s d o c ua y i o n t o ft pe i n s t m a e n PM AC sa l e .t e v - o to lo i nayz d he s r 0 c n r lag - i h w ih i ole D ft m hc v v s PI ,v lct n eo iy/a c lrto e o wa d c n r d n t h fl ra d t e e r rc mpe s - c ee a in f e f r r o tola o c t d n i e n h ro o n a to un to o i e y PM C sd s us e t th er rc m pe s to d t e ce a c ro o in f c in pr v d b d A i ic s d, hepic ro o n a i n a h la n e er rc mpe s - n r n a to e ito u e t hes tm rorc m pe s t go n a u i on r ls t m e o pa efed, d in a r d c d i o t yse e r o r n n n a i fo e me n s rngc to ys e i a r s c l a n i n g tpr pe fe t . e o re c s K e r s:posto c urc f ma h e t ol e r r c m pe s to ;PM ;  ̄'o c n r l y wo d iin a c a y o c i o ; ro o n n ain AC s v o to
三坐标测量机的误差分析及其补偿

收稿日期: 1996- 03- 06 © 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved.
46
沈 阳 工 业 学 院 学 报 1997 年
1. 2 三坐标测量机测头位置误差表达式
式 (1) 对坐标平移和旋转的坐标变换可应用到三坐标测量机中各滑台的平移和转动误差 向绝对坐标系的转换.
图 3 坐标系 向坐标系 的变换
图 4 三坐标测量机的坐标变换示意图
在图 1 中的 X 、Y、Z 的滑尺上分别建立三个坐标系 、 、 , 且使三坐标测量机的测头
xp
y=
- ex y + A - M y m - ey y + A -
- ezy + A -
yp
(3)
z
- ex z
- ey z
zm - ezz
zp
式 (3) 中的各误差项均是以绝对坐标系原点为起点, 在单一运动方向上测量的, 其误差评定基
准是理想的坐标轴方向. 因此, 式 (3) 中的误差分量包含三个滑尺运动方向的相互垂直度误差.
48
沈 阳 工 业 学 院 学 报 1997 年
x = x m - ex x - ey x - y m Ηx z (5)
y = y m - ex y - ey y
工作台数显装置为光栅尺, 误差测量装置和坐标值检定用双频激光干涉仪. 实验数据如表
2 所示.
表 2 测量数据
从实验中看出补偿后坐标值更接近于坐标检定值, 显示误差分别为 exm = 010479 mm , eym = - 010039 mm , 而补偿后坐标定位误差为 ex = 010038 mm , ey = 010005 mm.
力矩电机的控制系统设计与性能实验论文

力矩电机的控制系统设计与性能实验摘要现代高档数控机床的发展对转台旋转进给伺服性能提出了越来越高的要求,在各种数控转台中,传统的驱动方式难以实现高精度加工。
本文采用KOLLMIRGEN力矩电机直接驱动数控转台,消除了中间传动环节,具响应速度快、动态刚度和定位精度高等特点。
本文依据“零传动试验台”的具体要求,采用了“NC嵌入PC”的开放式数控系统,采用工控机作为上位机,来处理数控系统中的弱实时性任务,用PMAC运动控制卡作为数控系统的控制器,完成数控系统中的强实时性任务;安装了PMAC运动控制卡的IPC与Danaher Motion伺服驱动器、力矩电机组成了三环闭环的控制系统;利用PMAC提供的PID执行程序在线调节整个系统的PID参数,优化系统的动态性能;利用RENISHAW激光干涉仪测定电机的定位误差并编写误差补偿程序,实施误差的在线补偿。
通过对电机的调试和检测,电机的性能达到各项设计要求。
关键词:力矩电机,PMAC, RENISHAW激光干涉仪Design of Torque Motor Control System andPerformance TestABSTRACTThe performance of the rotative feed servo is more and more important with the development of modern advanced numerical control machine ,in various NC rotary tables, the traditional drive mode is very difficult to implement high precise processing. The text taking kollmorgen direct drive NC rotary table, in this drive mode, all mechanical transmission elements are eliminated, and it has quick response ,high dynamic stiffness and position precision.According to requirement of zero mechanical transmission experimental table, this text taking “NC+PC” openning architecture, IPC was used as its supervisory to process weak real-time tasks in CNC, and PMAC motion control card was used as the control of CNC to process strong real-time tasks. stage.The whole system PID parameters had been adjusted on—line using the PID executive program provided by PMAC,optimized the dynamic performance of the system. The setting accuracy and the resetting accuracy of the Torque Motor had been determined by RENISHAW laser interferometer. system,and then the setting error compensation on-line had been realized by compiling the error compensation program.Through the debug and detection of the motor, the performance index of it has fulfilled the designing requirement.Key words: Torque Motor, PMAC, RENISHAW laser interferometer目录第1章.绪论 (1)1.1. 课题研究的目的及意义 (1)1.2. 力矩电机的研究状况及发展趋势 (2)1.3. 国内外超精密数控系统中应用PMAC概况 (4)1.4. 开放式数控系统 (6)1.5. 论文的主要内容与任务 (7)第2章.伺服驱动单元 (9)2.1. 力矩电机 (9)2.1.1. 力矩电机的主要特点及应用 (9)2.1.2. KOLLMORGEN力矩电机D063M (10)2.2. 伺服驱动器 (11)2.2.1. 驱动器的主要端口 (12)2.2.2. 编码器的引脚及意义 (13)2.2.3. 正弦编码器的反馈 (15)2.3. 本章总结 (15)第3章.PMAC运动控制卡 (16)3.1. PMAC运动控制卡的概述 (16)3.2. PMAC运动控制卡的功能简介 (16)3.3. PMAC运动控制卡的开放性 (18)3.4. PMAC运动控制卡的应用 (19)3.5. 本章总结 (19)第4章.控制系统设计 (20)4.1. 控制系统的组成与分类 (20)4.1.1. 运动控制系统的组成 (20)4.1.2. 运动控制系统的分类 (21)4.2. 运动控制系统的电路设计 (22)4.2.1. 系统连线 (24)4.2.2. 系统的电气控制 (29)4.3. 运动控制系统的调试 (29)4.3.1. I变量的设置 (29)4.3.2. 驱动器参数的设置 (32)4.3.3. 电机PID参数的设定及调节 (33)4.4. 系统安全 (37)4.4.1. 硬件超程限位开关 (38)4.4.2. 软件超程限位 (38)4.4.3. 跟随误差限制 (38)4.4.4. 屏蔽技术 (38)4.4.5. 光电隔离 (39)4.5. 本章总结 (39)第5章.系统精度检测实验 (40)5.1. RENISHAW激光干涉仪的测量原理 (40)5.2. 精度测量结果分析 (41)5.2.1. 基于PMAC的误差补偿功能 (41)5.2.2. 测量结果分析 (42)5.3. 本章小结 (44)第6章.结论及展望 (45)6.1. 结论 (45)6.2. 展望 (45)参考文献 (47)致谢 (50)第1章.绪论1.1.课题研究的目的及意义目前多轴联动数控机床的发展水平已经成为衡量一个国家制造装备业水平的重要标志,国外发达国家已把数控转台直接驱动多轴联动数控机床作为新一代产品的主流发展方向之一,并正在积极研制和开发。
PMAC位置控制系统螺距误差补偿的应用研究

响点位 、 直线 控制 系统 工件 的尺 寸精 度 ; 轮 廓控 制 系 对 统, 将影 响工 件轮 廓 的加 工 精度 , 生轮 廓失 真 。 产
P AC运 动 控制 卡在 位置 控制 系统 中有 很 好 的应 M 用效 果 , 具有很 强 的控制 功 能 , 同时 具有 螺距误 差 补偿
形、 导轨 和滚 珠 丝杠 螺母 副 的磨损 、 动误差 以及 控 制 传 元件 特 性变 化 等影 响 。主 要 影 响 因素 有 : 1 步进 电 ()
动 机 的误差 , 括 、 包 步距 角误 差 、 动态 误 差 以及 起停 误
差 ;2 机 械传 动 系统 的几 何 误 差 , 括所 有 传 动 副 引 () 包
Absr c t a t:T sp p ra a y e n t e i fu ncn a t r fp sto o to y t m ,wh l h i h a c mu a e r hi a e n l z d o h n l e i g f co so o ii n c n r ls se ie t e pt c u l td e 。 c
精度对 位 置精度 影 响最大 。运 动体 的定 位精 度是 指运 动部件 实 际位置 和 目标 位 置 的接近 程度 。定 位 精度对
系统性 能有很 大 的影 响 , 如数 控机 床进 给 系统 , 例 将影
母 副转 换 为定位 平 台 的移动 。平 台 的定位 精度 受 到所 有 电气 和机 械装 置及 元件 结 构设 计 和制造 精度 的综合
r ri n i o tn o c fpo i o ro . On — l e pi h a c m u ae ro o p n a in h d b e o sa mp ra ts ur e o st n er r i i t cu n c lt d e r r c m e s to 本 体 的运 动 是 控 制 的 目 机 标 , 制 的 目的是 为 了尽 量 获得能 够 满足期 望 精度 、 控 稳
基于PMAC控制器的直线电机性能研究
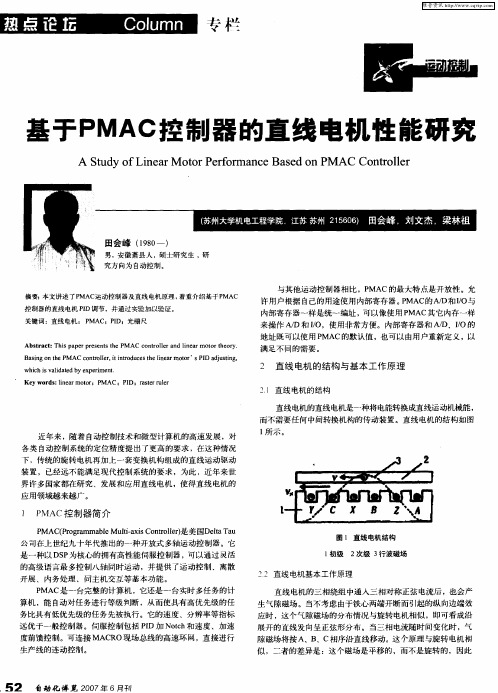
2 直 线 电机 的 结构 与基本 工作 原理
2I 直 线 电机 的结 构
Ke r : i e rmo o ;P y wo ds l a t r n MAC}P D;r se lr I a trr e u
满足不同的需要 。
பைடு நூலகம்
Ab t a t Th sp p rp e e t h M AC c n r le n n a o o h o y. s r c : i a e r s n st e P o to l ra d l e rm t rt e r i
B s go e M ot lriit d csh n amoo ’ I dut g ai nh ACcnr l , r ue eler tr S Dajsn, n t P o e tn o t i P i
田会 峰 (90 18 一)
男,安徽萧县人 ,硕士研究生 ,研 究方 向为自动控制
与其他运动控制器相 比,P MAC的最大特 点是开放性 允
摘 要: 本文 讲述 了P MAC 运动 控制 器及 直 线 电机 原理 , 着重介 绍 基于 P C MA 控 制器 的直 线电机 PD调 节 ,并通过 实验 加 以验 证。 I 关 键词 :直线 电机 ; P MAC I }PD}光栅尺
隙磁场 将按 A、B、C相序沿直线移动 。这个原理与旋转 电机相
似 ,二者 的差异是 :这个磁场是平移的 ,而不是旋转的 ,因此
52 自动化博览 2 0 年 6月手 07 I
维普资讯
称为行波磁场 。
即每个伺服周期最后两个指令速 度的差值[ V() V(・)。I c n一 n1] E C
基于定位平台的大尺寸工件视觉测量技术研究

机械设计与制造Machinery Design & Manufacture249第6期2021年6月基于定位平台的大尺寸工件视觉测量技术研究马平,欧建国,张智阳(广东工业大学机电工程学院,广东广州510006)摘要:对于大幅面工件的几何尺寸很难进行全尺才视觉测量的问题,提出一种单目视觉加运动控制联合的测量方法。
该方法结合了图像检测功能与运动平台的可移动特点,对大尺度工件进行分区编号,控制直线精密定位平台按逆时针顺序对相应区域进行图像采集处理,并建立一种基于Canny 边缘检测与分段序贯最小二乘法拟合求交点的角点检测算法, 通过获取先后两不同区域图像角点坐标的偏差,结合定位平台位移信息,实现对大幅面工件的全尺寸视觉测量。
最后运用建立的大尺寸工件视觉测量系统对特征丰富的工件进行测量实验,实验结果表明系统在200mm 测量范围内可保证0.05m m 的精度要求。
关键词:大尺寸工件;视觉测量;运动控制;边缘拟合中图分类号:TH16;TP23文献标识码:A文章编号:1001-3997(2021 )06-0249-04A Research on Visual Measurement Technology of LargeSize Workpiece Based on Positioning PlatformMA Ping , OU Jian-guo , ZHANG Zhi-yang(Guangdong University of Technology College of Electromechanical Engineering , Guangdong Guangzhou 510006, China)Abstract :冠 is difficult to carry out f ull-size visual measurement f or the geometric dimension of large surface workpiece , a mea surement method of m onocular vision combined with motion control has been presented. This method combines the image detec tionjunction with the movable characteristics of t he moving platform , it carries on the p artition numbering to the large scale work piece, and control the linear p recision positioning p latform in the counterclockwise order of t he corresponding region image acqui sition and processing, a comer detection algorithm based on Canny edge detection and piecewise sequential least squares f itting for intersection points had been established, and obtain the deviation of a ngular p oint coordinates of t wo different region images ,based on positioning platform displacement information, the J ull size vision measurement of large scale workpiece has been real ized. Finally 9 the visual measurement system of large size workpiece has been used to measure the workpiece with rich features ,The experimental results show that the system can ensure the accuracy requirement of 0.05mm within the measurement range of200mm.Key Words :Large-Size Workpiece ; Visual Measurement ; Motion Control ; Edge Fitting1引言大尺寸金属平板类零件在现代制造业中被广泛应用于工业、农业机械、航天航空各个领域中。
动磁式直线电机定位误差检测与校正
动磁式直线电机定位误差检测与校正目录一、内容概述 (2)1.1 直线电机应用领域 (2)1.2 定位误差对性能的影响 (3)1.3 研究的重要性和必要性 (4)二、动磁式直线电机概述 (6)2.1 直线电机基本原理 (6)2.2 动磁式直线电机的结构特点 (7)2.3 动磁式直线电机的应用领域 (8)三、定位误差检测 (9)3.1 定位误差的定义及分类 (10)3.2 检测原理和方法 (12)3.3 检测流程与步骤 (13)四、定位误差校正技术 (14)4.1 校正方法概述 (14)4.2 静态误差校正技术 (16)4.3 动态误差校正技术 (17)4.4 智能校正方法与技术趋势 (18)五、实验与分析 (19)5.1 实验系统搭建 (20)5.2 实验方案设计与实施 (21)5.3 实验结果分析 (23)六、应用实例研究 (24)6.1 实际应用背景介绍 (25)6.2 定位误差检测与校正过程展示 (26)6.3 应用效果评估与反馈 (27)七、结论与展望 (28)7.1 研究总结 (29)7.2 技术创新点梳理 (30)7.3 未来研究方向与展望 (31)一、内容概述本文档旨在详细介绍动磁式直线电机定位误差检测与校正的方法和原理。
随着科技的不断发展,动磁式直线电机在各个领域的应用越来越广泛,其精度和稳定性对于整个系统的性能至关重要。
研究和掌握动磁式直线电机的定位误差检测与校正是提高其性能的关键。
本文档首先介绍了动磁式直线电机的基本原理和结构特点,然后详细阐述了定位误差的产生原因及其对系统性能的影响。
在此基础上,针对动磁式直线电机的定位误差,提出了多种有效的检测方法,包括直接测量法、间接测量法、自适应控制法等。
针对不同类型的定位误差,给出了相应的校正策略和方法,以提高系统的精度和稳定性。
本文档还对动磁式直线电机定位误差检测与校正的实际应用进行了详细的案例分析,以验证所提出的方法和策略的有效性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PMAC下直线电机定位精度分析与误差补偿技术
作者:吴玉厚, 宋德儒, WU Yu-hou, SONG De-ru
作者单位:沈阳建筑大学交通与机械学院,辽宁,沈阳,110168
刊名:
沈阳建筑大学学报(自然科学版)
英文刊名:JOURNAL OF SHENYANG JIANZHU UNIVERSITY(NATURAL SCIENCE)
年,卷(期):2005,21(5)
被引用次数:14次
1.Liu Tianhua;Lee Yungchang;Chang Yihua AdaptiveontrollerDesignforaLinearMotorontrolSystem 2004(02)
2.贾激雷;徐月同;傅建中双频激光干涉仪测试直线电机进给定位精度的研究[期刊论文]-机械工程师 2004(08)
3.Liu Yonggui;Wei Yangding Studyonopen-looppreisionpositioningontrolofamiropositioningplatformusingapiezoeletriatuator 2004
4.吴玉厚;潘振宁PMA控制器中PID调节的应用[期刊论文]-沈阳建筑工程学院学报(自然科学版) 2004(02)
5.张珂;吴玉厚椭圆零件精密加工中直线电机的控制与应用[期刊论文]-航空制造技术 2004(03)
6.任偲评价机电一体化系统--定位精度分析与检测、误差补偿[期刊论文]-制造技术与机床 2002(12)
7.Wu Yuhou;Zhang Ke;Zhang Yu Appliationresearhoflinearmotorinthepreisionmanufatureofnon-irlesetionparts[期刊论文]-Chinese Journal of Mechanical Engineering 2004(10)
8.Fu Dawei;Wu Yuhou Theappliationoflinearmotorinhigh-speedpreisionylindrialgrinding 2001(01)
9.Guo Qingding;Guo Wei;Zhou Yue PreviewfeedforwardompensationofpermanentmagnetlinearsynhronousmotorservosystemimplementedwithAdaline [外文会议] 2000
1.宋德儒.吴玉厚.张珂.徐湘辉基于PMAC控制的直线电机精确定位[期刊论文]-机械制造2005,43(7)
2.贾激雷.徐月同.傅建中双频激光干涉仪测试直线电机进给定位精度的研究[期刊论文]-机械工程师2004(8)
3.欧阳航空.陆林海.侯彦丽精密定位平台的系统误差分析及螺距误差补偿方法的实现[期刊论文]-机电工程2005,22(1)
1.林健.汪木兰.李宏胜基于遗传神经网络的直线伺服系统定位误差补偿[期刊论文]-组合机床与自动化加工技术2011(2)
2.林健.汪木兰.汤玉东基于RBF网络的数控直线电机进给定位精度研究[期刊论文]-微电机 2011(3)
3.张丽秀.周亚静.刘晓辉基于UMAC的直线电机定位误差补偿实验分析[期刊论文]-沈阳建筑大学学报(自然科学版) 2011(4)
4.卫排锋.雷玉勇.戴良博.王荣娟应用误差补偿技术提高水射流加工质量的研究[期刊论文]-机械设计与制造
2011(6)
5.林为才经纬仪调焦机构设计[期刊论文]-光机电信息 2010(12)
6.林为才.王晶一种高精度调焦机构设计[期刊论文]-长春理工大学学报(自然科学版) 2010(4)
7.相恒富.张立军.傅建中CO2激光微加工实验台定位精度预测模型研究[期刊论文]-机械传动 2009(3)
8.夏风林.蒋高明.葛明桥高速经编机电子横移系统运动精度分析[期刊论文]-纺织学报 2009(3)
9.张从鹏.刘强.罗学科.谢富春直线电动机工作台神经网络误差场建模与补偿[期刊论文]-制造技术与机床
2008(5)
10.相恒富.张立军.石永军基于LSSVM的直线电机进给定位误差补偿研究[期刊论文]-机械工程师 2008(4)
11.林为才.王晶一种新型调焦机构设计[期刊论文]-长春理工大学学报(自然科学版) 2007(4)
12.王利杰.吴玉厚PMAC-PEWIN运动程序下载问题的分析[期刊论文]-机电产品开发与创新 2006(4)
13.王建平.靖新利用PLC脉冲输出和高速计数功能实现轴的精确定位控制[期刊论文]-沈阳建筑大学学报(自然科学版) 2006(1)
14.李发尧高速直线运动单元设计及性能评价实验技术研究[学位论文]硕士 2006
本文链接:/Periodical_syjzgcxyxb200505038.aspx。