第6章在线检测与误差补偿技术.
大型超精密平面度在线测量与误差补偿技术(精)
大型超精密平面度在线测量与误差补偿技术1平面度在线测量的数学模型与误差分离方法对于平面度在线测量,可以采用四测头电容式组合传感器装置安装在加工机床的 z轴上,按一定的测量走点路径对工件表面进行测量,测量结果中迭加了两项误差:基准误差(即导轨运动副误差)和工件表面误差。
因此,要精确测量工件平面度,必须采用误差分离技术。
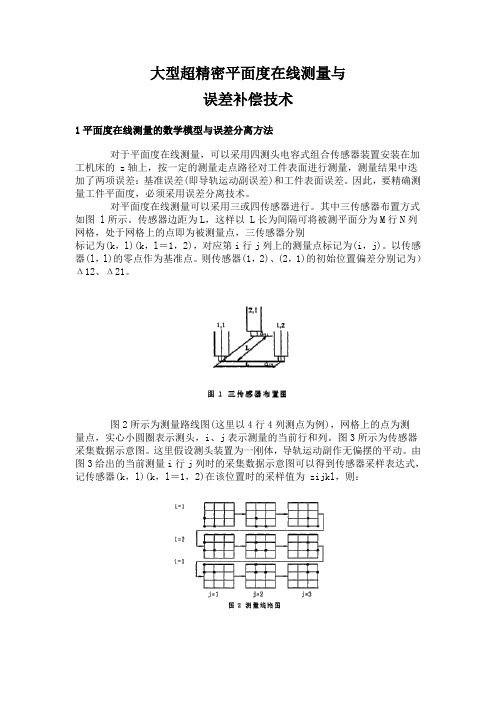
对平面度在线测量可以采用三或四传感器进行。
其中三传感器布置方式如图 l所示。
传感器边距为L,这样以 L长为间隔可将被测平面分为M行N列网格,处于网格上的点即为被测量点,三传感器分别标记为(k,l)(k,l=1,2),对应第i行j列上的测量点标记为(i,j)。
以传感器(l,l)的零点作为基准点。
则传感器(1,2)、(2,1)的初始位置偏差分别记为)Δ12、Δ21。
图2所示为测量路线图(这里以4行4列测点为例),网格上的点为测量点,实心小圆圈表示测头,i、j表示测量的当前行和列。
图3所示为传感器采集数据示意图。
这里假设测头装置为一刚体,导轨运动副作无偏摆的平动。
由图3给出的当前测量i行j列时的采集数据示意图可以得到传感器采样表达式,记传感器(k,l)(k,l=1,2)在该位置时的采样值为 zijkl,则:图3所示为传感器采集数据示意图。
这里假设测头装置为一刚体,导执运动副作无偏摆的平动。
由图3给出的当前测量i行j列进的采集数据示意图可以得到传感器采样表达式,记传感器(k,l)(k,l=1,2)在该位置时的采样值为Zijkl,则:2测量误差源分析及实用误差分离方法的讨论对于平面度形状误差的误差分离方法,可以采用递推逐次两点(TSTP)法和最小二乘逐次两点(LSSTP)法。
对于大型精密、超精密平面度在线测量,则应采用混合逐次两点(HSTP)法,对于精密小平面工件,采用二维最小二乘插值逐次两点(LSISTP)法进行误差分离,2.1测量误差源分析逐次两点误差分离方法是以采样公式(1)为分析处理基础的,但在实际系统中,由于各种因素的影响,采样获得的传感器信息中不仅包含运动副误差和测量平面形状误差,而且还带有各种噪声信号。
第六章 软测量技术

三、软测量技术的建模
1.机理建模
• 根据化学反应方程式、能量平衡物料平衡方程式, 根据化学反应方程式、能量平衡物料平衡方程式,分 析生产工艺过程和各种变量之间的相互影响情况, 析生产工艺过程和各种变量之间的相互影响情况,从内在 的机理出发,找出主导变量(被测变量) 的机理出发,找出主导变量(被测变量)与有关辅助变量 之间的数学关系(模型),这种建模方法称为机理建模 ),这种建模方法称为机理建模。 之间的数学关系(模型),这种建模方法称为机理建模。 机理建模需要有扎实的物理、化学和生物方向面基础知 机理建模需要有扎实的物理、 对工艺过程十分清楚,各种工艺数据准确可靠。 识,对工艺过程十分清楚,各种工艺数据准确可靠。机理 可以采用仿真的方法。 建模可以采用仿真的方法 建模可以采用仿真的方法。 机理建模从事物的本质出发认识问题和解决问题, 机理建模从事物的本质出发认识问题和解决问题, 有优越性,对于较简单的生产工艺过程有实用性 实用性, 有优越性,对于较简单的生产工艺过程有实用性,对较 复杂的工艺过程则存在很大难度, 复杂的工艺过程则存在很大难度,和其它方法结合可以 产生更好的效果。 产生更好的效果。
二、软测量技术的内容
2.软测量模型的建立
一旦确定了辅助变量,软测量的核心工作就是建立软测 核心工作就是建立软测 一旦确定了辅助变量,软测量的核心工作 量模型,如下图所示: 量模型,如下图所示:
软测量最本质的技术 软测量最本质的技术是表征辅助变量和主导变量之间数 最本质的技术是表征辅助变量和主导变量之间数 学关系的软测量模型。与控制系统建模类似, 学关系的软测量模型。与控制系统建模类似,建立软测量 模型主要有机理建模 经验建模和 机理建模, 模型主要有机理建模,经验建模和机理与经验相结合的建 模。
精密和超精密加工技术课程教学大纲
精密和超精密加工技术课程教学大纲(总8页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--《精密和超精密加工技术》课程教学大纲(一)课程基本描述课程名称:精密和超精密加工技术英文译名:Precision and Ultraprecision Machining Technology课程学时:32 学时适用专业:机械设计制造及其自动化教材:袁哲俊、王先逵主编《精密和超精密加工技术》,机械工业出版社,2006年教学参考书:王先逵编《精密加工技术实用手册》,机械工业出版社,2001年刘贺云、柳世传编《精密加工技术》,华中理工大学出版社,1991年(二)课程的性质、研究对象及任务精密和超精密加工技术是机械制造业中最重要的部分之一。
它不仅直接影响尖端技术和国防工业的发展,而且还影响机械产品的精度和表面质量影响产品的国际竞争力,世界各国都把它作为先进制作技术中优先发展的内容,高等院校的机制专业是较老的学科,随着新技术的应用,此专业也应与时俱进开设该课程。
本课程研究对象是精密和超精密加工技术的基本理论、加工工艺、加工设备、测量技术及环境技术等。
本课程的主要任务是培养学生:1、建立起精密和超精密加工技术的基本概念,了解精密和超精密加工技术的应用范围。
2、掌握精密和超精密加工技术的基本理论和基本技术,具有选择和应用精密和超精密加工工艺和设备的基本能力。
3、了解精密和超精密加工技术的最新发展趋势,新理论和新技术。
培养学生在相关技术领域从事精密和超精密加工工作和研究的能力。
(三)教材的选择与分析精密和超精密加工技术是一门正在不断发展的新技术,国内外有关的教材和书籍不是很多,一些专著也不完全适合作教材。
目前国内可供选择的教材有:袁哲俊、王先逵主编《精密和超精密加工技术》,机械工业出版社;王先逵编《精密加工技术实用手册》,机械工业出版社;刘贺云、柳世传编《精密加工技术》,华中理工大学出版社。
数控机床误差与补偿

误差补偿法
通过软件或硬件方法,对机床的热变形进行补偿,减小或消 除热误差对加工精度的影响。
04
几何误差补偿
几何误差来源与分类
01
制造误差
由于机床零部件制造精度不足导致 的误差。
热误差
由于机床运行过程中温度变化导致 的误差。
03
02
装配误差
电气误差补偿
通过调整电机的电气参数,如电 流、电压等,来减小或消除由于 电机性能差异和传动系统误差引 起的误差。
传感误差补偿
通过使用高精度的传感器来检测 机床的实际位置和姿态,并将这 些信息反馈给控制系统,以实现 误差的实时补偿。
软件补偿
数学模型补偿
通过建立机床的数学模型,并利用软件算法对模型进行优化,以减小或消除误差。这种方法需要精确的数学模型和高 效的算法支持。
感谢您的观看
THANKS
几何误差补偿方法
硬件补偿
通过改进机床零部件制造和装配精度来降低几何误差。
软件补偿
利用数控系统软件对几何误差进行补偿,如螺距误差 补偿、反向间隙补偿等。
复合补偿
结合硬件和软件补偿方法,通过优化机床结构设计和 改进控制系统实现更精确的几何误差补偿。
05
运动误差补偿
运动误差产生机理
机械传动误差
由于数控机床的机械传动系统(如丝杠、齿轮等)存在制造和装 配误差,导致运动过程中产生误差。
自适应补偿技术
总结词
自适应补偿技术是一种能够自动调整和 优化补偿参数的误差补偿方法。
VS
详细描述
传统的误差补偿方法通常需要人工设定和 调整补偿参数,操作复杂且精度不高。自 适应补偿技术能够根据加工过程中的实时 反馈信息,自动调整和优化补偿参数,实 现动态误差补偿,进一步提高数控机床的 加工精度和稳定性。
测量误差分析与处理措施ppt课件

测量误差的分类
01
02
03
系统误差
在一定条件下,测量误差 具有确定的规律性。
随机误差
由于偶然因素引起的测量 误差,无规律可循。
粗大误差
明显超出正常范围,与实 际情况明显不符的测量误 差。
测量误差的来源
测量设备误差
设备本身精度不足或老 化等引起的误差。
环境因素
温度、湿度、气压等环 境条件变化引起的误差
函数建模法
函数建模法是一种基于数学模型的误差分析方法,通过建立 测量值与真实值之间的数学模型,分析误差产生的原因和规 律。
函数建模法适用于需要对误差进行深入分析和预测的情况。 通过建立测量值与真实值之间的函数关系,可以分析误差产 生的原因和规律,进而对测量过程进行优化和改进。这种方 法精度较高,但需要较深的数学基础和建模技巧。
统计分析法
统计分析法是一种基于数学统计原理的误差分析方法,通过对大量测量数据进行统计分析,计算误差 的分布和规律。
统计分析法适用于需要对大量测量数据进行误差分析的情况。通过统计学的手段,如平均值、方差、 置信区间等,可以全面了解误差的分布和规律,进而对测量过程进行优化和控制。这种方法精度较高 ,但需要较复杂的数学处理和较多的数据支持。
04
误差控制与预防
误差控制策略
制定测量标准
建立完善的测量标准体系 ,确保测量数据的准确性 和可靠性。
定期校准设备
对测量设备进行定期校准 ,确保设备性能稳定,减 少误差产生。
培训测量人员
提高测量人员的技能水平 ,确保他们能够正确、规 范地进行测量操作。
误差预防措施
优化测量方法
采用先进的测量方法和技术,提高测 量精度和准确性。
测量数据的准确性和可靠性。
数控机床误差补偿技术及应用_提高在线检测精度的补偿技术
工艺与检测数控机床误差补偿技术及应用提高在线检测精度的补偿技术天津大学 章 青 刘丽冰 刘又午 北京机床研究所 赵宏林 盛伯浩 摘要 文章利用在机测量运动链分析,提高测头球心的定位精度;同时以特征分析法来处理测头的内部误差。
通过补偿前后与三坐标测量机的实验数据对比,结果表明补偿效果良好。
关键词 在线检测 误差补偿 数控机床1 概述 加工过程的质量监测问题一直受到人们的重视。
制造业如何以低成本、高精度和灵活多变的柔性加工技术迎接二十一世纪的挑战也是人们关心的问题。
质量监控是现代加工技术的重要组成部分,作为加工过程监测手段的在机测头,可对工件安装定位、对刀、刀具磨损或破损以及加工件的形位尺寸等进行有效的监控。
目前针对测量精度问题的研究主要集中在如何提高测头系统的精度[5],当测头作为在机测量工具时,机床的坐标精度直接影响测量精度。
本文通过在机测量过程机床运动链分析,并以特征分析法来处理测头的内部误差,用软件补偿法提高测量精度。
2 在线检测过程的运动链分析 在线检测过程的运动链与加工过程相似,其区别是将刀具替换成测头。
根据机床几何误差补偿技术分析,将包括机床在内的在机测量系统抽象提炼,以低序体阵列形式描述机床拓补结构,通过相邻体的基本变换(包括位置变换矩阵和位移变换矩阵),其形式为(其中:c=cos,s=sin;A k、B k、C k为坐标系间的相对方位角)[AJ K]=c B k c C k-c B k s C k s B k x k (c A ks C k+s A k s B k c C k)(c A k c C k-s A k s B k s C k)-s A k c B k y k(s A k s C k-c A k s B k c C k)(c A k s B k s C k+s A k c C k)c A k c B k z k0001构成计算测头测球中心定位误差模型为R p o1=∏t=u[AJ K]R p k1式中:∏t=u表示多体系统低序体的连乘,R p k={x p k,y p k,Z p k}T为测头测球中心相对于刀具坐标系的坐标值。
精密复杂零件数控加工在线检测误差补偿研究
精密复杂零件数控加工在线检测误差补偿研究发布时间:2021-09-06T11:07:37.133Z 来源:《科学与技术》2021年4月11期作者:张淞[导读] 精密复杂零件制造是一个国家制造业水平的集中体现。
随着我国数控加工张淞航空工业哈尔滨飞机工业集团有限责任公司黑龙江哈尔滨 150000摘要:精密复杂零件制造是一个国家制造业水平的集中体现。
随着我国数控加工技术的飞速发展.人们对在线检测技术提出了更高的要求。
当前国内大量在线检测软件受机床系统、测头品牌等限制,编程烦琐,价格昂贵无法通用。
开发一套宏程序在线检测库,引入数控机床系统,通过调用宏程序并赋值,生成所需要的在线检测程序。
控制加工中心自动完成检测任务.这样不但可以有效提高产品检测精度、效率,还可以大大降低检测成本。
关键词:精密复杂零件数控加工;在线检测误差补偿;前言:制造业装备技术的不断进步,对零件的加工精度和效率等提出了愈来愈高的要求。
与规则零件相比较,复杂曲面零件的设计、加工和精度检测等过程更为复杂,要求有相应的检测技术对不同尺度、不同精度要求的各类复杂曲面加工精度进行检测和保证。
一、精密复杂零件数控加工在线检测原理复杂零件通常由圆柱、圆锥、凸台、凹槽、球、椭圆等几种基本体组合而成.将一个精密复杂零件按不同特征分解为不同的基本体。
在计算机上生成基本体在线检测宏程序,将基本体在线检测宏程序由通信接口传输至数控机床,通过调用基本体在线检测宏程序库中的宏程序并赋值,生成所需要的在线检测程序。
机床伺服系统驱动测头对被测件上的点、线、面、圆孔、圆柱、圆锥、凸台、凹槽、球、椭圆等基本体进行测量,测头测量时发出的触发信号通过测头与数控系统的专用接口转换为数控系统可识别的信号。
数控系统接收信号后,记录下各测量点坐标,对坐标进行处理,最终获得组合体的测量结果。
二、精密复杂零件数控加工在线检测误差补偿1.在线检测系统在误差分析与补偿的科学研究领域上仍然存在着关键性目前国内所开发的在线检测系统的检测对象较为单一,针对复杂曲面的在线检测系统较少,然而复杂曲面的零部件的应用越来越广泛,只能针对简单规则形体(如平面、圆柱等)的在线检测平台不能满足要求。
复杂曲面零件加工精度的原位检测误差补偿方法
复杂曲面零件加工精度的原位检测误差补偿方法一、背景介绍随着科技的发展,复杂曲面零件在现代制造业中得到了广泛应用。
然而,由于其形状复杂、表面曲率变化大等特点,加工精度的控制成为了一个难点。
为了保证零件的质量和可靠性,需要对其进行精确的检测和误差补偿。
二、原位检测方法原位检测是指在加工过程中对零件进行实时检测。
常用的原位检测方法有以下几种:1.光学扫描法利用激光或相机等设备对零件表面进行扫描,获取其三维形状信息。
这种方法具有非接触、高精度、快速等优点,但需要专业设备和软件支持。
2.触发式探头法将探头与机床配合使用,在加工过程中对零件进行触发式检测。
这种方法可以实现高频率的检测,并且适用于各种形状的零件。
3.振动传感器法利用振动传感器对机床刀具和工件之间的振动信号进行监测,从而推断出零件表面形状。
这种方法不需要直接接触零件表面,适用于高速加工和不易测量的零件。
三、误差补偿方法原位检测可以获得零件的实时形状信息,但由于加工误差、机床刚度等因素的影响,检测结果可能存在一定误差。
因此需要对误差进行补偿。
1.基于模型的方法将零件形状建立数学模型,并通过计算机仿真等手段预测其加工误差。
然后根据实际检测结果对模型进行修正,最终得到精确的形状信息。
这种方法需要专业知识和软件支持,但可以实现高精度的补偿效果。
2.基于数据挖掘的方法利用机器学习等技术对大量数据进行分析和处理,从中提取出影响零件形状的关键因素,并建立相应的模型进行预测和补偿。
这种方法不需要精确的数学模型,但需要大量数据支持。
3.基于反馈控制的方法根据原位检测结果对机床运动参数进行实时调整,以达到最佳加工效果。
这种方法简单易行,但受到设备和环境条件限制。
四、误差补偿实践应用误差补偿方法的实际应用需要根据具体情况进行选择和调整。
以下是一些常见的误差补偿实践应用:1.基于反馈控制的加工误差补偿在数控机床加工过程中,通过对刀具位置、速度等参数进行实时调整,以达到最佳加工效果。
在线监测与误差补偿技术
三、误差补偿技术
误差修正、抵消、均化、钝化、分离等都是误差补偿的 各种形式和方法。
广义上误差校正、误差修正都是误差补偿的同义词。 从狭义角度看: 误差修正(校正)指对测量、计算预测的误差进行修正 误差分离指从综合测量中分离出单项的误差; 误差抵消指两个或以上误差相互抵消; 误差补偿指对一定尺寸、形状、位置相差程度(差值) 的补足,本章所论述的误差补偿主要指这一种。
22
外 、 孔 类 形 状 位 置 误 差 测 量
§2在线检测与误差补偿方法
圆 一、形状位置误差的在线检测
1. 外圆、孔类形状位置误差的测量方法,主要针对的是
超精密主轴系统的回转误差,不仅进行静态测量还十 分重视动态测量方法,其主导思想是将测量基准圆误 差与主轴回转误差分离开。提出了三点法和转位法。 三点法:
外 圆 、 孔 类 形 状 位 置 误 差 测 量
一、形状位置误差的在线检测
2)闭合等角转位法:测头不动工件相对于轴系转α角, 共测m个位置, m α=360°,可测得m组数据:
Vi (θ ) M i (θ ) + S (θ + i360° / m) =
S 当m很大时, i (θ ) 的平均值可以忽略不记,于是可得回 转轴系平均误差:
8
误 差 补 偿 的 概 念
三、误差补偿技术
误差补偿:在机械加工中出现的误差用修正、抵消、 均化、“钝化”等措施是误差减小或消除。 用修正法或称校正法加工丝杠
9
误 差 补 偿 的 概 念
三、误差补偿技术
抵消补偿法装配车床主轴
10
误 差 补 偿 的 概 念
三、误差补偿技术
航空零件典型结构特征在线测量及补偿技术研究
航空零件典型结构特征在线测量及补偿技术研究2 中航西安飞机工业集团有限责任公司【摘要】航空结构件加工精度要求高,加工难度大,在线测量与补偿技术是实现航空结构件精准制造的一种先进技术方法。
本文主要对在线测量与补偿技术进行了介绍,并对其适用范围与技术优势进行了探讨,开发了典型结构特征在线测量及补偿程序,对于在复杂工程环境下实现关键结构特征在线测量与补偿具有较为重要的参考价值。
【关键词】航空零件;在线测量;补偿;结构特征1引言航空零件通常具有外形结构复杂、协调关系多、精度要求高等特点,在数控加工过程中,受切削力、残余应力释放等影响,加工变形往往较难控制,容易导致产品加工质量问题。
机床在线测量系统能够对各阶段零件加工状态进行精确、快速检测,实现对零件加工过程质量的测量与评定,同时可以有效避免离线检测中二次装夹及变形带来的误差。
特别是在适用于多品种、小批量航空结构件加工的智能化柔性生产线中,使用在线测量及自动补偿技术可以实现机床自动控制、数据自动分析、加工自动补偿,省时省力,对于提高航空结构件加工质量具有十分重要的意义。
2在线测量与补偿技术机床在线测量系统是集数控机床、数控系统及测量探头系统为一体的高度集成化系统[1]。
在线测量与补偿技术是基于机床在线测量系统,通过测量探头采集零件加工过程关键结构特征尺寸数据信息,经与理论值进行对比,计算得到补偿值并写入数控系统相应位置,进一步开展补偿加工的先进制造技术,其主要实现思路如图1所示。
图1 在线测量与补偿技术思路2.1 适用范围要实现机床误差的快速检测与补偿,主要有两种途径:(1)在数控系统直接执行测量与补偿程序;(2)借助外部商业软件,依靠独立计算机进行计算分析与补偿。
其中,第一种方法简单易行,但受限于数控系统计算能力,对于复杂外形公差无法进行补偿,而第二种方法虽然功能强大,但实际操作过程较为繁琐,不利于现场实施,因此使用程序进行在线测量与补偿是实际工程应用的较优解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6. 1 概述6. 2 在线检测与误差补偿方法6・3微位移技术0 旳ii. 4*弐扎烤一、保证零件加工精度的途径保证零件加工精度的途径:1 ) “蜕化”原则,或称“母性”原则。
2) “进化”原则,或称"创造性”原则。
提高加工精度的途径:1)隔离和消除误差; 2)误差补偿,用相应的措施去“钝化仁抵消、均化误差,使误差减小•© ■的M烹攵缚二.加工精度的检测1.离线检测工4^加工完毕后,从机床上取下,在机床旁或在检测室中进行检测。
2.检测工件加工完毕后,在机床上不卸下工件的情况下进行检测。
3・衽线检产工件在加工过程中的同时进行检测,又称主动检测、动态检测。
o 旳込.J|A 水茅在线捡测特点1)能够连续检测加工过程中的变化,了解在加工过程中误差分布和发展;2)检测结果能反映实际加工情况;3)在线检测的难度较大;4)在线检测大都用非接触传感器,对传感器的性能要求较高;5)—般是自动运行,形成在线检测系统•二兰捡测灵爭1)直接检测系统:直接检测工件的加工误差,并补偿2)间接检测系统:检测产生加工误差的误差源,并补偿0旳尢茅三.误差补偿技术1.误差味的旣念在机械加工中出现的误差釆用等措施使误差减小或消除误差补偿。
从狭义的角度分析:(校正)是指对测量.计算.预测所得的误差进行修正(校正);是指从综合测量所得的误差中分离出所需的单项误差;是指两个或更多个误差的相互抵消;是对一尺寸、形状、位置差值的补足.2.浜差补偿的筈A(1)实时与非实时误差补偿实时误差补偿一加工过程中,实时进行误差检测,并紧接着进行误差补偿,不仅可以补偿系统误差,且可以补偿随机误差。
非实时误差才H尝一只能补偿系统误差。
(2 )软件与硬件误差补偿软件补偿一通过计算机对所建立的数学模型进行运算后,发出运动指令,由数控随动系统完成误差补偿动作。
软件与硬件补偿的区分是看补偿信息是由软件还是硬件滸於此,,»I. Ff . I •:・二屋补偿的矣型(3)单项与综合误差补偿综合误差补偿是同时补偿几项误差,比单项误差金要复杂,但效率高、效果好.(4)单维与多维误差补偿多维误差补偿是在多坐标上进行误差补偿,难度和工作量都比较大,是近几年来发展起来的误差补偿技术。
O 旳血护总扎烤3・误差补偿过程过程:1)反复检测出现的误差并分析,找出规律,找出影响误差的主要因素,为疋渓注瓷目.2 )进行误差信号的处理,去除干扰信号,分离不需要的误差信号,找出丄件加J误差与征彳gF 芸1;乞间::关系,建兰相应的数学模型.3)选择或设计合适的误差补偿-4;系统和哆心二t严,以便在补偿点实现补偿运动。
4)验证误差补偿的效果,进行必要的调试,保证达到预期要求•O 旳血护总扎烤4 •误差补偿系统的俎建5•误害补偿技术的发展 1 )预报型补偿Fore - casting Compensatory Control - FCC 技术,利用在线随机建模理论.先进的传感技术.计算机技术.微位移技术等,对误差 进行建模和预报,对动态误差进行实时补偿。
2)综合型补偿对工件尺寸、形状和位置误差同时进行综合 补偿,其中包括对尺寸、形状和位置一种误差 中的多项误差进行综合补偿。
1 )误差信号的检测 2) 误差信号的处理 3) 误差信号的建模 4 ) 尝控制 I 5 )补偿执行机构计算机控制系统«W ■ r 6 • - • - a* «课差补偿系统组成示意图 1-谋差信号检测2-谋差传号处理 3-谋差信号建模4-补偿控制5-补偿执行机构一.形状位置误差的在线检测L;卜圆.孔娈形状位置误差的测量方法三点法建立如图所示的直角坐标系。
0]点的极坐标为X ( 0 )和y(0)0s(0)为被测工件的轮廓形状误差。
测微仪A、B、C的输出信号分别为A(e). B(0). C(0), 则J -J消去X( e)和y( e)得三点法误差分离基本方程为© 旳血弍攵苓测量时,若取采样点数为N,则令只有在主轴回转完整一周后,衣>邑冬擔夙诱萼转位法采用圆光栅测量角度位置,用测微仪(测头传感器)测量工件形状误差和回转轴系运动误差,起点电路提供一个作为角度位置的起始点信号。
图G-7 转彳立法测峨原理1 a光橱2—辅助紬3-Mtt «戒栄性联紬巾4被》轴系5 ««心及转位工具6—T件7—测头8—光》读敛头9一诫动开关鴻微仪最后求得任意时刻机床主轴回转运动误差武点电路1转位法测量时只作一次转位,共测得两组数据式中每次转位时,测头不动,工件相对于轴系转■角,共测m个位直,,可得数据可得© 旳血弐扎鸟若整个检测装置的检测重复性好,则均运动误差当咄艮大时,■的平均值忽略不计,可得回转轴系平© 旳血弐扎鸟在0度位置测完后,测头不动,工件相对于轴系各作一次■ 转位角,取转位角等于采样间隔角■, 共得3组数据O 旳14- 弐趴缚由式(1)、(3)可得由式(1)、(2)可得取平均值一般式由式(4 ) . ( 5 )可得© 4血弐扎烤2.平面类形状位置误差的测量方法若检测装置重复性好,可认为可得式中测量分两次进行,在第二次测量时,工件转过180度, 得到两组数据© 4血弐扎烤测量分两次进行,在第二次测量时,工件平移一个步距S,得到两组数据若机床和检测装置重复性好,可认为可得两点'漱I«头刖\ 1、他G-io脚点”;制a取步距S为两测头的间距进行测量,若将机床直线运动部件的角运动误差■忽略不计,则得到O 旳血弐趴煜工件一JU 法测M用间距为步距S 的三个测头进行测量,则考虑机床直线 运动部件角运动误差 ■,得到3组方程O二点法(2) (3)将式(1)与式(3)相加后减去2倍的式(2)得"心)机床直线运动部件一测头B测头C测头/2・磨削工务圆度的误差补偿14图6-13 磨削工件圆度的误差补偿1一工件 2—妙轮 3 基准盘 4—位岡步器 5—传感》 6"三爪自定心长* 7—骡动系统 8—电《9—放大调解 10 —相调龍1】一解二.在线检测与误差补偿系统应用-.车訓丄件圆皮和画枉zk 的鎂差补:二工件圆度误差平均减小40%, 工件圆柱度误 差平均减小23 %4工件圆度 误差由0. 74 P m减少到0. 375 pm 。
吕1 ■ H)012—放大«13 «处理器14—挖制》義!存轩吞44JJ 厂尸十7 4 jJ …;;3 •钱削工件内孔圆柱度的误差才a 6-14 熒削工件内孔a 柱度的误差补偿 1 —«刀 2—补信执行机构 3—梭镜 4—主轴轴系 5"分光《6—激光《7-x-y^向光传©«R —拥《系統 9 建模与用报 10—控制》11 —*冷电SISft*卜信执彳i 机构山丄1」4 i i !4JJ ;『f • tJ 1 ■ '4.立铳工件直线度的误差补偿该系统直线 度误差减少780%.禺675 立佻工件貢线席的俣差补偿 1 工件 2—«ft 3-切削主轴 4一光传濾抽5—驱动系统 6—控制» 7—建模 与侦报 8—«1 ft 系冼 y —机床工作台10- «光器 U —测嚴》后补偿后的内 孔圆柱度误 差减少了56 % "64%图6-17精密丝杠螺距的谋差补偿M LM P •烤平面度误 差减少了 80%1IJ II I I ~ ■6.精密丝杠螺距的误差孙偿ZZJxci补偿执行机构压电陶瓷单个螺距误差可减 少89%机床丝杠56W 6-36数控立徒工件平面度的谋差补偿 】-工件2-力具3—M 针4央具5-'涉进电动机I6—步进电动机2 7—《比束1 8支* 9 «光束2 10— W««就器 11»91 12-几 谀 集%IT 存秤科41 j 丁 ........ —I~^T~;■5.数控立铳工佯平面度的误卷补偿光电码盘微处理器 \线件位移传感器一、微位移系统及应用微位移系统由黴u-d构、岭测二置和去:制系纭组成,为了实现小行程、高灵敏度和高精度的位移。
饗位宀勺是实现微位移的执行机构,其核心部分是微位移器件;杪汉:装置是用来测量微位移的移动量及其精度,在闭环系统中作为反馈信号; 扛帝用兀用来控制整个系统的工作,通过控制策略实现需求的技术性能指标。
1)微进给2)误差补偿述鯉董》二、微位移机构的类型© 旳血趴o 旳血-A* 尢*T2乙屋控杯從位移工作台O 旳血-A* 尢 3磋二佶绵徉位移工作台放置于磁场中的材料发生尺寸和形状变 化的现象一磁致伸缩效应。
磁致伸缩机构是利用铁磁材料在磁场的 作用下产生微伸长运动来实现微位移的, 改变磁场强度可控制伸电磁铁rr 巧f弹簧微动工作台链策(或金W丝)图6-20 电磁控制微位移工作台长率,但铁磁材料在磁场的作用下,除了产生磁致伸缩外,还伴有发热伸长。
o 旳血-A* 尢*T电介质在外电场的作用下,由于感应极化的作用而产生应变,其应变大小与电场强度的平方成正比,其应变方向与电场方向无关一电致伸缩效应。
电致伸缩材料:铤镁酸铅系列(PMN)、弛豫铁电体.双弛豫铁电体、PZT铁电陶瓷系列等•电致伸缩器件具有结构紧凑、体积小、分辨率高,无发热现象.控制简单等特点.J.电介质受到机械应力作用时,会产生电极化,电菽化的大小与施加的机械应力成正比,电极化的方向随应力的方向而改变一正压电效应。
电介质在外电场的作用下,将产生应变,应变大小与电场大小成正比,应变方向与电场方向有关,当电场的方向改变时,应变的方向也M着改变一逆压电效应。
压电材料:铁电晶体和压电晶体两类。
常用的压电晶体有钛酸叔压电陶瓷、轄钛酸铅系压电陶瓷(PZT)。
0 A茅尺蟻式压电旳瓷屯执三坐标压电徉位移工徒台1)a)原始非工作状态b) b)器件A加电压后缩小夹紧电动机轴C)器件C加电压后轴向伸长推动器件A并使电动机轴向某一轴向方向作步进运动;d)d)器件B加电压后直径缩小央紧电动机轴;c)器件A不加电压后恢复原状松开电动机轴;F)器件C不加电后.轴向收缩恢复原状图弘21尺绩式民电陶住电机«)除toWT作状恣b) If件1先*电或机釉C)»件r »ifcH)»件B央累电动机«<?)■«/I 松开O »件C4fc«ff S•4、B植向伸«压电S斡G轴向忡編圧瞰》仟W&22三金»压电《位務工作台4 5- «<b rfVfr «_y m律轨債—・・「*含a-上•■■ft金»■»ffl6・23 «性支甘»性号轨1 一《«««2 ・•《«&« .1- »tttt电a件 < *«工作台5 «s 6—修*«7 «性《»8-art 工作仔♦WWM£»S0 旳血总典为设3个管状压电器件的变形量分别为■、■ ■,则X方向的微位移为・,y方向的微位移为,绕Z轴的转动.0 旳血4% 水茅[课后思考題习题6-2 习题6 -150 旳血聆IT。