自动移栽机械取苗机构及植苗机构研究
温室苗种自动化移植设备的应用研究
体工 作 环境 、 苗种大小 、 植 土湿度 等 具体 参 数来 培
设计 苗种 移植 设 备 , 而满 足 不 同实 际 移 植 工 作 从 的需 要 , 具体 设 计 的功能 和要 求可 以归纳 如下 : 具 有快 速培 植 土 生 成 的 功 能 , 够 将 培 植 土 能 挤 压成 型并 输送 到指 定 的工 作 位 置 , 能 自动完 并 成 搅拌 和 配水_ ; 有 自动 夹 取 和摆 放 苗 种 的 夹 1 具
状 的 培植 土 , 摆 放 苗 种用 。苗 种 摆放 部 分 主要 供 由夹 取机 构 和定 位 机 构 组成 , 取 机 构 把 苗 种 放 夹 在培 植 土附 近 , 定位 机 构 使 苗 种 固定 在 合 适 的位
置 。 培 植 泥 土 切 块 部 分 主 要 由 凸 轮 机 构 、 杆 机 连 构 和 切 刀 组 成 。 实 际 应 用 过 程 中 , 根 据 苗 种 具 可
文献标识码 : A
文章 编 号 :0 22 6 ( 0 2 0 — 1 4 0 10 —7 7 2 1 )20 2—4
快速 发展 的农 业 经 济 环境 下 , 统农 业 已经 传 不能 满足 现代 生 活对农 产 品 的更高 要求 。尤 其对 北 方 地 区 , 季农 产 品和蔬 菜 的供应 , 温室 种植 冬 对 技术 的依 赖 性 非 常 大 。 因此 , 室 自动 化 装备 技 温 术 必须快 速 发展 , 就 为温 室 种 植 技 术 带 来 了 良 这 好 的发展 契 机 。对 于 温 室 种 植 产业 , 室 苗 种移 温 植是 一项 非 常关键 的技术 。由于 被移 植 的苗 种
种 成 活 率 。样 机 试 验 表 明 : 论 分 析 和 样 机 试 验 较 吻合 , 机 结 构 合 理 , 有 很 好 的 移 植 效 果 , 到 了预 期 设 理 整 具 达
蔬菜穴盘苗自动取苗机构研究进展
2023·06农业机械NONGYEJIXIE摘要:育苗移栽是蔬菜种植使用较多的方式,蔬菜穴盘苗移栽种植普遍采用人工和半自动移栽机械,劳动强度大,严重影响蔬菜种植的收益,全自动移栽种植机械已成为国内外关注的重点。
本文归纳阐述了自动移栽机核心工作部件取苗机构的研究现状,并对我国蔬菜移栽种植较为典型的新疆进行介绍和分析。
针对我国蔬菜穴盘苗移栽种植模式和技术多样、育苗穴盘尺寸不一、移栽效率低的现状,指出我国蔬菜穴盘苗移栽应与宜机化改造深度融合,注重控制育苗穴盘质量,向育苗标准化、自动取苗装置智能化方向发展。
关键词:蔬菜穴盘苗;育苗;移栽;自动取苗蔬菜穴盘苗育苗移栽可以避开春季灾害性天气,延长生育期,提高产量和品质,在农业生产中得到应用。
机械化移栽蔬菜穴盘苗时,半自动移栽机可以降低劳动强度,但只做到了省力不省工,移栽效率并没有显著提高[1],而自动移栽机可显著提高移栽效率,减少用工。
国外移栽机自动化程度较高,但是与我国的蔬菜种植模式、育苗农艺不相符,我国在移栽机取苗机构、取苗末端执行器的结构上进行了大量研究。
本文对相关研究进行综述,对我国典型地区的蔬菜移栽机使用现状进行介绍,分析我国蔬菜穴盘苗自动移栽机取苗装置存在的不足,并对未来开展取苗装置研究提供思路。
1自动取苗机构研究现状自动取苗机构是自动移栽机的核心部件,按照取苗方式的不同,可以分为夹针式取苗、夹茎式取苗、顶出式取苗和顶出-夹取式取苗。
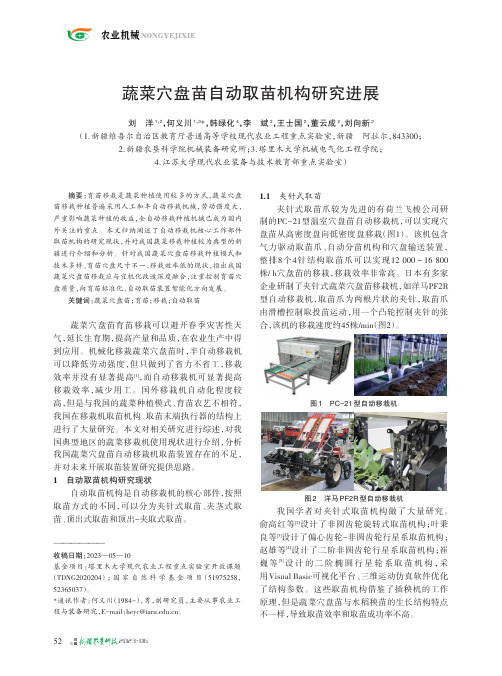
1.1夹针式取苗夹针式取苗爪较为先进的有荷兰飞梭公司研制的PC-21型温室穴盘苗自动移栽机,可以实现穴盘苗从高密度盘向低密度盘移栽(图1)。
该机包含气力驱动取苗爪、自动分苗机构和穴盘输送装置,整排8个4针结构取苗爪可以实现12000~16800株/h 穴盘苗的移栽,移栽效率非常高。
日本有多家企业研制了夹针式蔬菜穴盘苗移栽机,如洋马PF2R 型自动移栽机,取苗爪为两根片状的夹针,取苗爪由滑槽控制取投苗运动,用一个凸轮控制夹针的张合,该机的移栽速度约45株/min (图2)。
穴盘苗自动移栽机设计及实验
0 引 言
移栽可使作物生育期提早 , 具有可观 的经济效益 和社会效益¨ J 。传统的移栽方式用工较多 , 生产效率 低, 难以实现大面积作 业。为适应现代 农业 规模 化 、
机 械化 和 工厂 化 的生 产 模 式 , 采 用 穴 盘育 苗 移栽 具 有
栽植 和 覆 土等 作业 , 实 现高 效 可靠 的移栽 。
苗 栽植 的行 距 、 株 距 与深 度 稳 定 , 能 够较 好 地 满 足农 艺 要 求 。 关键词 :自动移栽机 ;取苗机构 ;植苗机构 ;移 箱机构
中图分类号 :s 2 2 3 . 9 文献标识码 :A 文章编号 :1 0 0 3 — 1 8 8 X( 2 0 1 3 ) 0 4 — 0 1 5 6 - 0 4
主要技术参数如下 :
匹配 动力/ k W: 2 . 4
整 机 质量/ k g : 2 0 0 移 栽 行数/ 行: 2 移 栽行 距/ am: r 4 0 0~ 6 0 0 移 栽 株距/ mm: 2 0 0~ 5 0 0
穴 盘 规格 : 8 X 1 6或 l O x 2 0
b
4
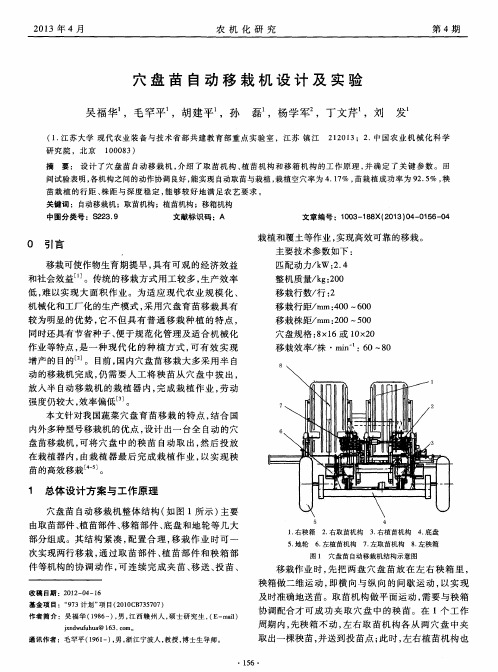
1 . 右秧箱 2 . 右取 苗机构
3 . 右植 苗机构
4 . 底盘 8 . 左秧箱
5 . 地轮 6 . 左植苗机构 7 . 左取苗 机构
图 1 穴盘苗 自动移栽 机结构示意 图
移栽作业 时 , 先把 两盘 穴盘苗 放在左 右秧 箱里 , 秧箱做二维运 动 , 即横 向与纵 向的 间歇 运动 ,4期
同时运动到最高处 ( 即接苗点 ) , 取苗机构把秧 苗投放
到植 苗 机 构 的栽 植 器 内 , 由栽 植 器 完 成 两 棵 秧 苗 的栽 植, 最 后 由覆 土轮 完 成 覆 土 并 压 实 。在 取 苗 机 构 夹 取 出一 棵 秧苗 后 到 下一 次 夹 取 秧 苗 前 的 时 间 内 , 秧 箱 横 向移 动 1个 穴 孑 L 的距离 ; 当一 排 秧 苗 取 完 后 , 秧 箱 纵
国内现行移栽机械取苗分苗机构的应用与发展
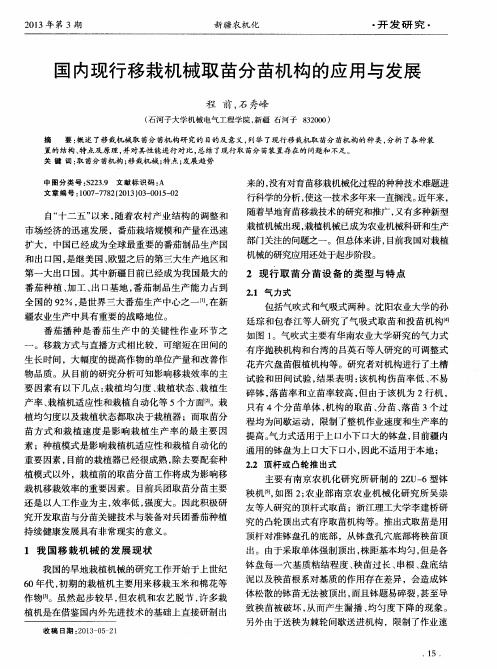
秧机【 5 I , 如图 2 ; 农 业 部 南 京 农 业 机 械化 研 究 所 吴 崇 友 等人研 究 的顶 杆式 取苗 ;浙 江理 工 大学李 建桥 研 究 的 凸轮顶 出式 有序 取苗 机构 等 。推 出式取 苗是 用 顶 杆对 准钵 盘孔 的底 部 ,从 钵 盘孔 穴底 部将 秧 苗顶 出。 由于采 取单体 强 制顶 出 , 株 距基 本 均匀 , 但是 各
2 3 4 5
图 4 对 辊 式 取 苗 分 苗 机 构
1 . 机 架 2输送带 3 . 接料 斗 4 . 下拨秧 棍 5上拨 秧棍 6 . 输送带 轮 7 . 压 秧杆 8 . 夹秧 板 9 . 秧 苗盘
花卉穴盘苗假植机构等 。研究者对机构进行了土槽 试验和 田间试验 , 结果表 明: 该机构伤苗率低 、 不易 碎钵 , 落苗率和立苗率较高 , 但 由于该机为 2 行机 , 只有 4 个分苗单体 , 机构 的取苗、 分苗 、 落苗 3 个过
程均 为间 歇运 动 ,限制 了整 机作业 速 度 和生产 率 的
自“ 十二 五 ” 以来 , 随着 农 村产 业 结 构 的调 整 和 市场 经济 的迅 速 发展 ,番 茄栽 培 规模 和产 量在 迅 速 扩大 ,中 国已经成 为 全球 最重 要 的番 茄制 品生 产 国 和 出 口国 , 是 继美 国 、 欧盟 之后 的第 三 大生 产地 区 和 第 一 大 出 口国 。其 中新疆 目前 已经 成 为我 国最 大 的
6 0 年代 , 初期 的栽植机主要用来移栽玉米和棉花等 作物1 3 1 。虽然起步较早 , 但农机和农艺脱节 , 许多栽
植机 是 在借鉴 国内外 先进 技术 的基 础 上直 接研 制 出
穴盘苗自动取苗机构的研究分析
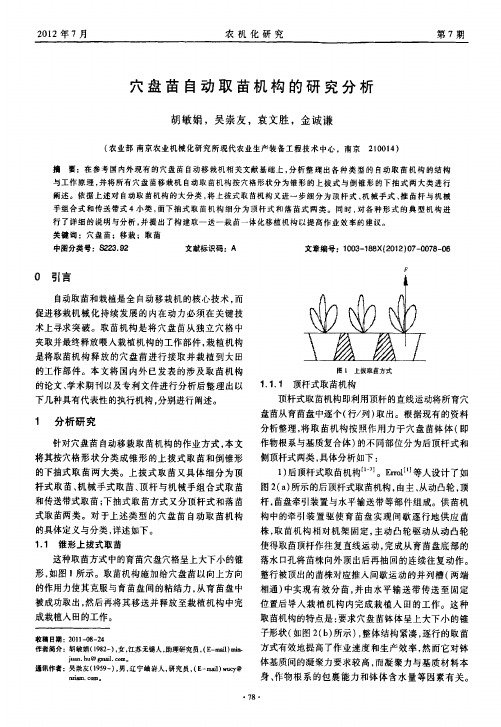
穴格边缘的限 翩后,再经由助推装置推动 相互挤压向 后移动逐个落 到传动带上,完成取苗作业 。侧顶杆取 苗方式采用分 离式的苗盘,易于长远距离 运输.取苗 工序操作简单、控制方便,穴盘苗损失率小,工作可靠
性较高。
需保持垂直姿 态,套接于苗爪上的推苗环 在预放苗位 置处与苗爪产生相对滑移将苗钵从取苗爪上推出 ( 图 4 中实线所示) ,并清理捧粘连在苗爪上的 钵土。这种 取苗结构较为 复杂,但直接抓取苗钵体有 利于减少穴 盘苗苗叶的损 伤从而增加栽植后的成活率 ,且对各种
1
图l 上拔 取茁方 式
1 .1.1 顶杆式取 苗机构
顶杆式取苗机构即利用顶杆的直线运动将所育穴 盘苗从育苗盘中逐个( 行/列) 取出。根据现有的资料 分析整理,将取苗机构按照作用力于穴盘苗钵体 ( 即 作物根系与基质复合体 ) 的不同部位分为后顶杆式和 侧顶杆式两类,具体分析如下: 1) 后顶杆式取苗机构¨一“。 Er r ol …等人设计了如
78
2012 年7月
农机化研究
第7期
机械手式取苗 机构直接作用夹持力于 穴盘苗钵体
完成拔取苗作 业。经过对现有文献的分析 整理,选取
露~罄
l b)
H i de o【“1 等人设计的取苗机构( 如图4 所示) 予以分析
说明。
田2后顶杆式取苗机构及穴盘苗盘结构图
2) 侧顶杆式取苗机构”曲 1。 Edw a r dp ’等人设计了 如图3( a ) 所示的侧顶杆式取苗机构.由顶杆机构、苗
苗钵的适应性较好。 1.1 .3 顶杆与机械手组合式取苗机构”“’ M i c hi hi m ” l 等人设计的顶杆与机械手组合式取
苗机构如图 5所示,基本为前述两种取苗机构的结合 体。人工将整 个苗盘首先水平放入供苗机 构,随着驱 动链轮的顺时 针旋转,逐行地向前间歇供 给苗株。当 感测装置检测 到待取苗位置有苗时,顶杆 由液压驱动
温室穴盘苗移栽机的设计及试验研究的开题报告

温室穴盘苗移栽机的设计及试验研究的开题报告一、选题背景随着我国农业现代化进程的加快,温室种植作为一种高效、经济、环保的种植模式,已经在我国得到了广泛的应用。
在温室种植中,苗期移栽是一个重要的环节,直接影响着作物的整个生长发育周期和产量。
目前,传统的苗期移栽方式主要是人工移栽,但是由于移栽质量难以保证、效率低下、人工成本高等问题,急需有一种高效、精准、自动化的移栽方式。
二、设计目标本文的设计目标是:设计一种基于机器视觉技术的温室穴盘苗移栽机,能够自动完成苗期移栽的全部工作,具有高效、精准、稳定的特点,可以适应不同规格和品种的穴盘苗。
三、研究内容本文的研究内容主要包括以下几个方面:1. 机器视觉技术的应用:采用机器视觉技术对穴盘苗进行识别和定位,实现机器视觉指导下的自动移栽。
2. 移栽头的设计:根据穴盘苗的特点,设计一种适合的移栽头,能够快速、准确地将苗移栽到种植槽中,并保证移栽质量。
3. 移栽机构的设计:设计一种具有高效、稳定、精准移动功能的移栽机构,并采用汽缸和步进电机控制移栽头的上下和前后移动。
4. 控制系统的设计:设计一种稳定、可靠的控制系统,实现对机器视觉、移栽机构的精准控制,完成自动移栽任务。
四、研究方法本文采用以下研究方法:1. 文献调查:对国内外相关研究进行调查和综述,获取有关自动化移栽机的技术原理、设计思路和实现方法。
2. 穴盘苗特性测试:测试不同规格和品种的穴盘苗的几何尺寸、质量和生长状态等特性,为机器视觉识别提供数据支持。
3. 机器视觉实验:采用视觉传感器对穴盘苗进行识别和定位,研究机器视觉算法的可行性和精度。
4. 移栽头设计和制造:根据穴盘苗的特点和移栽机构的要求,设计一种适合的移栽头,并制造实物进行测试和验证。
5. 移栽机构设计和模拟:通过SolidWorks等软件进行移栽机构的三维建模和模拟,验证机构的可行性和稳定性。
6. 控制系统设计与实现:采用PLC和单片机等硬件和软件实现移栽机的控制系统,测试系统的可靠性和实用性。
蔬菜自动移栽技术研究现状与分析
蔬菜自动移栽技术研究现状与分析何亚凯;颜华;崔巍;陈科;韩振浩;包春林【摘要】蔬菜育苗移栽技术的应用可以提高作物产量和经济效益.目前国内蔬菜移栽机械多为半自动机型,移栽效率较低,限制了移栽机械的推广应用.自动移栽机械可以提高蔬菜移栽效率,受到较来越多学者的关注.该文阐述了国内外自动移栽机研究与应用现状,并对主要自动移栽取苗机构结构的特点进行分析.通过对比国内外自动移栽机研究现状,总结了国内自动移栽取苗技术研究存在的不足,并对未来我国自动移栽机的研究与发展提出了建议.【期刊名称】《农业工程》【年(卷),期】2018(008)003【总页数】7页(P1-7)【关键词】蔬菜;移栽机;自动移栽;取苗机构;研究现状【作者】何亚凯;颜华;崔巍;陈科;韩振浩;包春林【作者单位】中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;现代农装科技股份有限公司,北京100083【正文语种】中文【中图分类】S223.90 引言蔬菜是人们日常生活中不可替代的副食品,是维持人体健康所必需的维生素、矿物质和膳食纤维的主要来源。
近年来,随着人们生活水平的提高,蔬菜标准园和“菜篮子”基地建设的深入推进,我国蔬菜种植业结构调整步伐的加快,全国蔬菜生产快速发展,种植面积和产量呈上升态势[1-3]。
根据中国统计年鉴的数据知,我国蔬菜种植面积由1995年的951.5万hm2增加至2015年的22 00万hm2,所占农作物总种植面积的比例从6.35%增长到13.22%,产量也从2.57亿t增长到7.69亿t[4]。
玉米移栽机自动送苗装置的研究
区, 为了确保小麦 的生长期 不受影 响, 不得不 使夏 玉
米 的生 长期 缩 短 , 在 这 种 情 况下 农 户不 得 不 使 用 早 熟 品种 , 而这 在一 定 程 度 上严 重 限制 了玉 米 生 产 的增 产
是: 把点种 、 育苗 、 选苗等 田间作业 的过程提前在保护 地里完成 , 进 而改变 了传 统 的玉 米种植 方式 , 大大提
要 因素的影 响 : 一是 机械化 栽植水平低 下。当前 , 国 内大部分移栽机械普遍 为半 自动化 , 即主要依靠人工
2 ) 有效地 解决各季 间接茬矛 盾 突出 的问题。在
收稿 日期 :2 0 1 2 — 0 8 - 2 3 基金项 目 :公益性行业 ( 农业) 科研专项 ( 2 0 1 1 0 3 0 0 3 ) 作者简 介 :宋 小雨 ( 1 9 8 6 一 ) , 男, 长 春人 , 在读 硕士 研究 生 , ( E — m a i l )
中图分类号 :¥ 2 2 3 . 2 文献标识码 :A 文章编号 :1 0 0 3 — 1 8 8 X( 2 0 1 3 ) 0 2 — 0 0 8 5 — 0 4
0 引言
玉米育苗移栽技术Biblioteka 获得玉米高产的有效栽培方 式, 是玉 米 丰产 配 套技 术 的重 要 环 节 , 是提早播种 、 提 早成熟 、 躲 过 伏 旱 的重 要 手 段 。该 技 术 的 主 要 特 点
植 面积 。
间和空间 , 不受 自然气候 条件 的影响。此外 , 也 十分 方便地对 幼苗进行 田间统一 管理 。同时 , 一穴 一苗 ,
还 能 有效 地 节 省 种 子 , 有 效地 降低生产成 本 , 取得 良 好 的经济 效 益 。
玉米育苗移栽技术 的优点毋庸置疑 , 育苗 移栽实
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
植苗机构的选型思路
四杆机构
六杆机构
七杆机构
行星轮机构
行星轮连杆槽型凸轮机构
根据栽植机构的动轨迹的要求,选用了一种四杆机 构作为栽植机构的执行机构。以四杆机构作为基础进 一步拓展得到了行星轮栽植机构、六杆式栽植机构与 七杆式栽植机构,以及行星轮连杆槽型凸轮机构。
栽植机构选型
平行四边形栽植机构
不仅能够实现栽植所要求的动轨迹,而且能够保证鸭嘴 式栽植器始终垂直于地面,可以使苗在鸭嘴中保持良好的栽 植姿态,使栽植变得稳定可靠。
日本洋马蔬菜移栽机。
总结
1、四杆机构机构简单,但是调节株距需要改变转臂的数量或者 改变 转臂的长度,比较复杂。并且高速栽植是机构稳定性比 较差。
2、六杆机构最大的优点是可以实现小株距的栽植,并且鸭嘴走 过的轨迹路径比较的短可以提高栽植效率。
3、七杆机构的优点与六杆机构的相同,缺点是机构比较复杂。 4、转臂式栽植机构缺点是调节株距不方便,需要通过改变转臂
4
3
5
2 1
7 6
取杆1作为机架,杆2作为曲柄1,连杆7作曲柄2,连杆 5做鸭嘴固定杆。
七杆机构的优点是可以实现小株距栽植,缺点机构比 较复杂。
日本井关的蔬菜移栽机。
行星轮连杆槽型凸轮机构
由行星轮1、连杆2、3、 槽型凸轮4与鸭嘴栽植器5组 成。
行星轮连杆槽型凸轮机构 的优点是可以实现小株距栽植 缺点是滑槽高副的阻力比较大
美国RAPID Automated Systems公司移栽机的片状夹持具
该机构主要部件:片状夹指、锲形块、喷水管。 优点结构简单,轻巧灵活,可靠性高。
澳大利亚transplant systems公司移栽机的取苗机构
采用四针气缸驱动式,具有柔性和灵活性的特点,取苗 成功率高。针管内径足够大,否则容易发生锁死现象。
国外起步较早.发展快,种类较多,移栽器型式不同通用性都比较 强,其移栽机械已十分成熟,多品种多系列,性能稳定,可靠性高, 通用性好。但是操作复杂,匹配动力大,很难适应中国的国情。
依托现有工业机器人为本体的穴盘苗自动移
栽机
能实现移栽作业的最简单种植机械,它主要利用工业 机器人的机械本体和控制器,并安装能完成移栽的末端 执行器、视觉传感器,以组成一个移栽机器人系统。
年代 1987
1992
单位或个人
美国奥本大学 Kutz
K.C.Ting和 Y.Yang
品名
优点
缺点
苗圃植物移栽机器人 92孔穴盘移栽至 穴盘与生长盘位
36孔
置要求高
以四自由度工业机器 传感器可避免 结构复杂
人为本体
夹持器夹苗时用
力过大而伤苗
备注:以工业机器人为本体的移栽机具有特定的功能,只适用于特定的 环境,不便于对系统进行扩展和改进,其通用性差、利用率较低,与温 室自动化流水线作业设施不易实现配套.且价格昂贵。
平行四边形栽植机构的动轨迹能够保证完成栽植任务。 优点是机构简单 ,缺点是单栽植臂栽植株距比较大需要 通过调节栽植臂的数量或者机构杆长来调节株距,比较繁琐。
内蒙古农业大学研制2ZT-2型甜菜移栽机
行星轮转臂栽植机构
三个齿轮的分度圆半径要相等,从而使第三个齿轮的转 向与机架相反,保证鸭嘴始终垂直于地面。
3 植苗机构的研究
栽植动轨迹
当栽植机构动轨迹为摆线或者是余摆线时,理论上通过控 制落苗的位置都能达到垂直落苗的要求,即苗离开鸭嘴的瞬间 的水平速度为零。但不同的栽植器对轨迹也有不同的要求,余 摆线比较适合吊杯、钳夹式等非打孔栽植器。而对于打孔栽植 的鸭嘴式栽植器通常要求栽植动轨迹为摆线,因为这可以减少 鸭嘴在土内的行走路径,减小鸭嘴和土之间的作用力。
国内
分类 发明单位或个人 机型
优点
缺点
钳夹式移栽 1979年山西省运城 2zMB一2型钵苗 栽植机械结构简 作业速度低
机
地区农机所
移栽机
单,株距和栽植
深度稳定
吊篮式移栽 1997年黑龙江省八 2ZB-6型钵苗栽 可栽植多种蔬菜,
机
五零农场
植机
钵苗直立率达96%
导苗管式移 1995年北京农业大 2Z-4型栽植样机 对秧苗没有特殊 直立度不高
国内外研究现状 国外
日本
美国
其他各国
1963
BTP-2型甜菜栽植机 ,是第一个在温室 中使用纸筒钵育甜 菜苗并进行栽植的 国家
1973
Roth等研制了带式 喂入栽植机,人工 将钵苗放到输送带 上进行栽植
20世纪60年代
意大利切克基·马 格利公司生产的奥 特玛栽植机和荷兰 米启根公司的MT栽 植机为多见
的数量来调节株距,优点是栽植时机构比较稳定,适合于高 速栽植。 5、行星轮连杆槽型凸轮机构的优点是可以实现小株距栽植缺点 是滑槽高副的阻力比较大。
南京农业大学设计的取苗机构 通过动力盘(槽形凸轮)的旋转,实现夹指的张开和闭合
浙江大学设计的取苗机构
采用两个成一定倾斜角的气缸实现夹持。针式手指取苗成 功率较低,经过改进,采用铲式手指,成功率可达到82.5%。
美国Williames等提出的取苗方式
输送器伸入到苗内,通过一顶杆把钵苗顶到输送器内,当输 送器内装好钵苗后,旋转90°,然后把苗落入到导苗管内,进行 移栽。
齿轮连杆组合式取苗机构(日本洋马)
图1 取苗机构结构示意图 1. 行星架 2. 中心轮 3. 行星轮 4. 行星轮 5.静轨迹 6. 取苗爪 7. 连杆 8.滚子 9. 槽型凸轮 10. 行星轮轴 11.穴盘 12.托架 13
穴盘苗
齿轮连杆组合式取苗机构(日本洋马)
由取苗爪,驱动机构及槽形凸轮机构组成,实现从穴盘 中取苗和向植苗机构投苗的动作。
荷兰visser公司设计蔬菜移栽机
一排推杆4 从根部顶出幼苗,拔苗器7取出整排苗,放 到传送带9上面。
带传感器的滑动针取苗爪
压缩空气
安装盘
左视
气动驱动器
压缩空气 气动调节器
苗爪
传感器
爪张开状态 爪闭合状态
取苗机构由气动装置、滑动苗爪、传感器等组成,一剪刀 型机构来滑动苗爪,取苗时,苗爪从成一角度的套筒伸出,放 苗时,苗爪缩回套筒。
栽机ቤተ መጻሕፍቲ ባይዱ
学
的要求 ,适应性
强
圆盘式栽植 1999年吉林工业大 2ZT型栽植机 单独秧夹
机
学
伤苗率小于5%
关键机构
移-取苗机构
取苗机构是将穴盘 苗夹取并最终释放 至植苗机构的工作 部件
栽-植苗机构
植苗机构是将取苗机 构释放的穴盘苗进行 接取并移栽至大田的 工作部件
2 取苗机构研究
研究现状
取苗机构用于夹取幼苗,并投放到植苗器中。 目前国内移栽机仍普遍采用人工投苗方式,自动 取苗机构仍处于探索阶段。
六杆机构
4 3
5 6 2 1
由斯蒂芬斯六杆机构变换得到。选取杆件4作为机架,6为 曲柄,5为上平行四边形连架杆,3为鸭嘴固定连杆,2为下平 行四边形连杆。
在植苗动轨迹的基础上通过鸭嘴的左右开合可以较好 的完成植苗任务。六杆机构的最大优点是可以实现小株距 栽植,并且轨迹路径更短,效率更高。
七杆机构
主要内容
1 国内外现状 2 取苗机构研究 3 植苗机构研究
1 国内外现状
国内外研究现状 国外
20世纪初期,欧洲一些国家开始大最种植蔬菜和经济 作物,出现了早期的近代秧苗栽植机具。这些机具仍为手 动栽植,只是减轻了栽秧者肢体反复屈伸的繁重劳动。
自20世纪50年代开始,国外很多国家开展土钵育及移 栽的生产技术研究,研制出多种不同结构型式的半自动移 栽机。
当取多对转臂时要保证所取的齿数为转臂数量的整数倍。 栽植的株距只与转臂的数量、齿轮的中心距有关。
• 原理与四杆机构相 似,优点是栽植时 相比四杆机构更稳 定,适合于高速栽 植,但是缺少与之 对应的高速自动喂 苗装置。
• 缺点是单栽植臂栽
植株距比较大,需
要通过调节栽植臂
的数量或者机构杆
长来调节株距。