photoscan使用步骤
第八讲PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
三、稀疏点云重建
稀疏点云重建之后,我们可以大体上看到重建场景的样貌,其中红色部 分代表的是相机空间矩阵,主要是方便检查校验相机信息,被红色部分包围 的就是重建目标,可以看出,房屋的主体轮廓和纹理信息已经基本成型红色 部分之外的点云是一同被恢复出的场景信息,虽然是我们不需要的东西,而 且在拍摄图像是并没有特意兼顾,但是可以发现其三维重建点云依然可以接 受可见算法的强大!通过点云编辑工具将不需要的部分删除,下一步就要开 始密集点云重建了。
六、生成三维模型
处理完后生成的三维模型如下图
七、导出三维模型
在导出模型时选择.obi格式,利用Smart3D浏览器打开。
Photoscan软件操作步骤
1、打开photoscan软件,然后点击“菜单栏”--“工作流程”--“添加照片”
2、“菜单栏”--“工作流程”--“对齐照片” 此处“成对预选”选择“已禁用” 精度:越高越好,处理时间越长
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
Photoscan高级版1
Photoscan高级版1
Photoscan是一款专业的三维重建软件,它可以通过处理一系
列的照片生成高精度的三维模型。
本教程将介绍Photoscan高级版1.4的基本操作和功能。
安装
创建项目
在软件中,可以创建多个项目,每个项目对应一个场景或一个
物体。
创建项目需要选择相应的文件夹,并设置相应的项目名称。
导入图片
在项目中可以导入多张图片,这些图片将会用于生成三维模型。
导入图片需要选择相应的文件夹,并点击导入按钮。
对齐图片
在导入图片后,需要对它们进行对齐。
可以选择自动对齐或手动对齐,手动对齐需要在三维场景中进行。
生成稠密点云
对齐完成后,可以生成稠密点云。
稠密点云是用来表示场景中每个点的三维坐标。
在生成稠密点云之前,需要设置相应的参数。
生成网格模型
在生成稠密点云之后,可以生成网格模型。
网格模型是由许多小三角形组成,可以表示物体的形状和轮廓。
生成贴图
除了生成三维模型外,还可以生成贴图。
贴图是根据原始照片生成的一张图片,可以用来贴在三维模型上,增加真实感。
结语
以上就是Photoscan高级版1.4的基本操作和功能。
希望本教程能够帮助大家更好地理解Photoscan的使用方法。
使用Photoscan生成DEM及正射影像流程

使用Photoscan生成DEM与正射影像流程(使用像控点)1.参数预设使用工具菜单的工具-偏好设置打开PhotoScan Preferences对话框一般(General)选项卡上的参数设置下列值:立体模式:浮雕(如果你的图形卡支持四轴缓冲,使用硬件)视差:1.0将日志写入文件:指定Agisoft日志的目录GPU选项卡设置如下:勾选在对话框中PhotoScan检测到的任何GPU设备。
当使用少于两个GPU时,勾选“在执行GPU加速时使用CPU”高级选项卡参数设置下列值:保持深度图:启用存储绝对图像路径:禁用启用VBO支持:启用2.添加照片从工作流菜单中“添加照片”选择添加照片命令或单击工作区工具栏上的Add Photos按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
3.装载相机POS文件生成的模型使用的坐标系统是由这个步骤中设置的相机POS坐标系统决定的。
如果相机位置未知,这一步可以跳过。
对齐照片这种情况下需要更多的时间。
打开视图菜单中的参考面板,在参考面板工具栏上单击“导入”按钮,并在打开的对话框中选择包含POS信息的文件。
最简单的方法是载入字符分隔的文本文件(每张照片的x-和y坐标和高度(相机方位数据,即俯仰、滚动和偏航值,也可以导入,但数据不是必须)。
然后单击参考窗格中的Settings按钮,在参考设置对话框中选择相应的坐标系统,并根据测量准确度设置照片POS精度及标记、连接点、精度,如果没有在导入POS时指定坐标系,也可以在这个面板中指定坐标系。
地面高程:在倾斜拍摄的情况下,应该指定对应坐标系统椭球面上的平均地面高度。
点击确认后,相机位置会标记在模型视图中,如果在POS数据正确的情况下无法看到相机位置,点击工具栏中的显示相机按扭,然后点击工具栏上的重置视图按钮。
4.检查相机校准打开菜单栏“工具”-“相机校准”窗口。
默认情况下,Photoscan将在对齐照片和优化的过程中通过照片的相应参数自动估算矫正参数,如果相机相关参数缺失可以手工输入。
使用Photoscan生成DEM与正射影像流程.docx

运用Photoscan生成DEM与正射影像流程(运用像控点)1.毒数预设运用工具菜单的工具-偏好设置打开PhotoScanPreferences对话框一般(Genera1.)选项卡上的参数设置下列值:立体模式I浮雕(假如你的图形卡支持四轴缓冲,运用硬件)视差:1.0将日志写入文件:指定Agiso门日志的书目GPU选项卡设置如下:一般GPO网络Appoiranco导筑高报GFUdevices:□InteI(R)HDGraphicsP53O(24computeunits@1050...OpenC1.DQuadroM1∞0M(4computeunits@1 071MH乙204...CUDANote:GPUacce1.erationissupportedforiaageBatching,depthnapsgenerationand*eshrθfineιβnt.0OseCPUvhenperformingGPUacce1.eratedprocessingI OK I Cance1.WMv勾选在对话框中PhotoScan检测到的任何GPU设备。
当运用少于两个GPu时,勾选“在执行GPU加速时运用CPU”高级选项卡参数设置下列值:一般CPO 网⅛Appoaranco导航离级项目文件11Keepkeypoints0保持深度国0储绝对图像路行Export/Iaport0Stripfi1.eextensionsfromCa1.kgraIabg1.S01.oadca>eraca1.ibrationfrc∙nXMPRMadaτa□1.oadCa1.1.eraorientationang1.esfro三XiPκetadataO1.oadca>ora1.ocationaccuracy fro∙XIPaotadata∩1.oadGPS/INSoffsetfroaXMPκet⅞chta余啖□启用VEO支持11Enab1.eιiρ>apgenerationQEnab1.erichPythonconso1.e□AttachBarkerstoshapevertices□Refineιarkerprojectionsbasedoninagecontent11Usevisibi1.ityconsistentaeshfenerationaetbod(experi>enta1.)Tvwk5... KW所专设!S保持深度图:启用存储肯定图像路径:禁用启用VBo支持:启用2.添加照片从工作流菜单中“添加照片”选择添加照片吩咐或单击工作区工具栏上的AddPhOtoS按钮。
Photoscan使用说明书
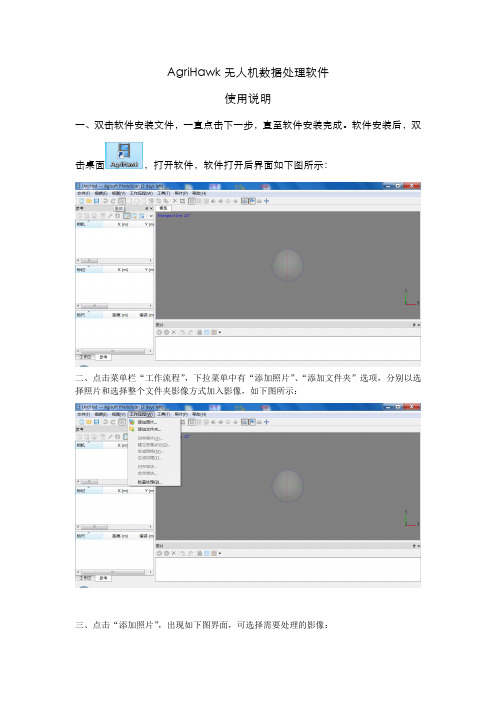
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
Photoscan工作流程
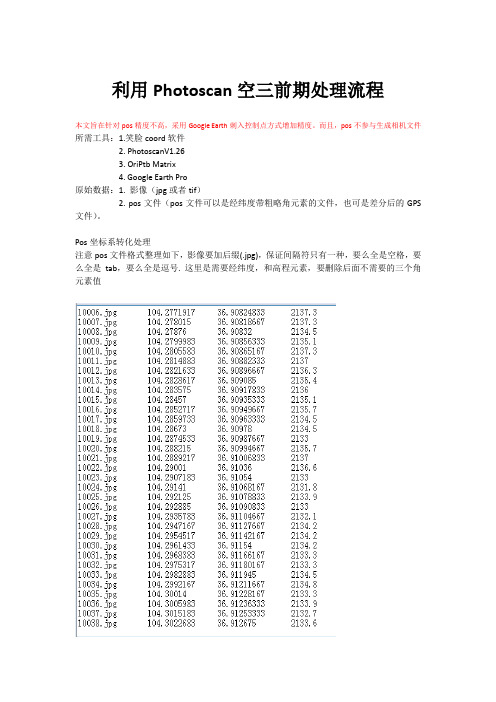
利用Photoscan空三前期处理流程本文旨在针对pos精度不高,采用Google Earth刺入控制点方式增加精度。
而且,pos不参与生成相机文件所需工具:1.笑脸coord软件2. PhotoscanV1.263. OriPtb Matrix4. Google Earth Pro原始数据:1. 影像(jpg或者tif)2. pos文件(pos文件可以是经纬度带粗略角元素的文件,也可是差分后的GPS 文件)。
Pos坐标系转化处理注意pos文件格式整理如下,影像要加后缀(.jpg),保证间隔符只有一种,要么全是空格,要么全是tab,要么全是逗号. 这里是需要经纬度,和高程元素,要删除后面不需要的三个角元素值这里我们需要将pos 大地坐标转化为平面坐标具体操作如下1.打开笑脸coord软件,设置-地图投影-2. 在投影设置里,选择高斯六度带,中央子午线设置105,其他保持不变3.点击文件转化,选择文件格式:点号经度纬度如果没有,点自定义格式设置,然后设置依次设置名称,扩展名,分隔符号,数据列表如下完成点击新建4.导入需要转换的pos文件,进行转化修改得到文件扩展名为.txt进行下一步正式处理处理流程:1. 打开photoscan,工作流-添加照片2. 在参考(reference)窗口选择导入,导入pos文件3. 选择好间隔符后,检查下X和Y值没有搞混,X为6位或8位,Y是7位,点确定4. 在主窗口界面可以浏览pos点概况5. 工作流-对齐照片,精度推荐用Low(速度快,普通和高匹配速度太慢),如果导入过pos 文件,下面可以选择参考(reference)模式,高级设置里的关键点限制和连接点限制最多不要超过默认值的2倍,也就是80000和2000。
6.检查对齐照片精度,精度小于5m说明Pos精度比较好,可以用于产生相机文件,这里由于精度不高,错误值比较大,此时采取不导入pos,产生相机文件7.当第6步中的错误有超过5的(accurac为默认的10.0情况下),则不能依据POS文件来输出自检校的相机文件。
PHOTOSCAN软件操作培训
四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
Photoscห้องสมุดไป่ตู้n软件操作
三维模型重建
一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 度),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
photoscan使用步骤
学习PhotoScan使用报告
一、添加模块
在工作区中新建一个模块。
二、添加图片
三、对齐图片
注意:成对预选必须选择已禁用。
四、优化对齐方式
注意:拟合4K选项打钩。
五、生成密集点云
注意:在生成密集点云前,必须调整区域大小大于物体摸型。
点击“调整区域大小”,可以进行区域调整。
调整好区域后,依据电脑配置选择中等数量的点云。
六、生成网络
注意:表面类型选任意,源数据选密集点云
内存不够,于是在安全模式下进行网络生成。
七、生成纹理
由于并未拍摄石碑俯视照片,所以生成的石碑模型顶部有远处的树木遮挡。
photoscan处理流程--相机标定--畸变改正
一、相机标定
主要利用PhotoScan强大的空三处理功能解算准确的相机内参数和畸变参数,其数据处理流程和生成正射影像的处理流程类似,包括添加影像—对齐影像(选择高精度)--优化相机参数—导出相机参数。
1、添加影像
2、对齐影像,类似于空三
3、优化相机参数
菜单:工具—优化相机,勾选需要优化的相机参数
4、导出相机参数
二、利用PhotoScan进行畸变参数改正
当测区影像数量较多,利用全部影像进行相机的畸变参数解算计算量是非常大的,且影像质量不好的影像会降低估计参数的精度,因此畸变参数估计时可以只选取纹理比较丰富的部分区域影像,利用导出的相机参数文件实现全部影像的畸变改正,需要指出的是如果是利用PhtotoScan改正畸变,需要导出PhtotoScan自己的格式,其他格式无法使用。
操作步骤为添加影像—导入畸变参数—导出未畸变影像。
1、添加影像
2、导入相机畸变参数
在相机参数界面导入相机畸变参数文件。
3、导出未畸变影像
菜单:工具—导出—未畸变影像,在对话框内选择所有相机,然后点击OK选择保存文件夹路径。
使用photoscan进行三维重建
使用photoscan进行三维重建Photoscan是一款功能强大的三维重建软件,它可以使用一系列照片来创建高精度的三维模型。
在本文中,我们将介绍如何使用Photoscan进行三维重建,并提供一些有关优化和改善结果的技巧。
首先,你需要准备一组照片来创建三维模型。
建议使用高像素的相机或手机拍摄照片,并确保光线充足且清晰。
你可以选择一些角度和距离不同的照片,这样可以从不同的角度捕捉到对象的细节。
在照片加载完成后,你需要对照片进行对齐。
点击“对齐照片”按钮,这将使用特征点匹配算法来对齐照片。
这个过程可能需要一些时间,具体时间取决于照片的数量和分辨率。
在对齐完成后,你可以通过点击“建立密集云点”来生成密集的点云。
一旦生成了点云,你可以进行模型的创建。
点击“建立模型”按钮,这将使用点云数据创建三维模型。
你可以选择创建一个表面模型,也可以创建一个体积模型。
Surface模型将重建物体的外部表面,而Volume模型将创建一个包含内部空间的实体。
在模型创建完成后,你可以进一步优化和改善模型的质量。
你可以使用工具栏上的一些功能来平滑,裁剪和填充模型,并对纹理进行增强。
你还可以调整模型的分辨率和细节程度,以获得更高的精度和更好的质量。
Photoscan还提供了一些进一步的功能,例如生成数字地形模型和测量模型的尺寸。
你可以使用测量工具来测量物体的长度,面积和体积。
完成所有优化后,你可以导出三维模型并进行进一步的应用。
Photoscan支持多种文件格式,如OBJ,PLY和FBX等。
你可以选择最适合你的应用程序的格式,并导出模型以供后续使用。
总结起来,Photoscan是一款功能强大的三维重建软件,可以通过使用一系列照片来创建高精度的三维模型。
在使用过程中,你需要准备好照片,并对其进行对齐、生成点云、创建模型、优化和改进质量以及导出模型。
相信通过Photoscan这个工具,你可以轻松地进行三维重建,并获得令人满意的结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学习PhotoScan使用报告一、添加模块
在工作区中新建一个模块。
二、添加图片
三、对齐图片
注意:成对预选必须选择已禁用。
四、优化对齐方式
注意:拟合4K选项打钩。
五、生成密集点云
注意:在生成密集点云前,必须调整区域大小大于物体摸型。
点击“调整区域大小”,可以进行区域调整。
调整好区域后,依据电脑配置选择中等数量的点云。
六、生成网络
注意:表面类型选任意,源数据选密集点云
内存不够,于是在安全模式下进行网络生成。
七、生成纹理
由于并未拍摄石碑俯视照片,所以生成的石碑模型顶部有远处的树木遮挡。