PWM整流器控制框图
三相电压型PWM整流器建模及控制
三相电压型PWM 整流器建模及控制摘要:本文通过基尔霍夫定律完成了对三相电压型PWM 整流器在三相静止对称坐标系下的数学建模。
并通过MATLAB/SIMULINK 仿真工具对其数学模型进行了仿真验证,可以看出,仿真验证的结果证明了模型的准确性和可靠性。
而后又介绍了一种直接电流控制方法即传统的双闭环PID 控制,并进行了仿真分析。
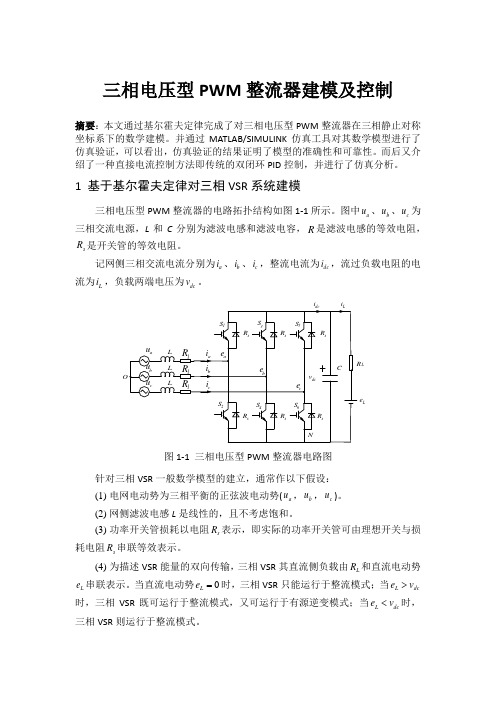
1 基于基尔霍夫定律对三相VSR 系统建模三相电压型PWM 整流器的电路拓扑结构如图1-1所示。
图中a u 、b u 、c u 为三相交流电源,L 和C 分别为滤波电感和滤波电容,R 是滤波电感的等效电阻,s R 是开关管的等效电阻。
记网侧三相交流电流分别为a i 、b i 、c i ,整流电流为dc i ,流过负载电阻的电流为L i ,负载两端电压为dc v 。
i Le i L图1-1 三相电压型PWM 整流器电路图针对三相VSR 一般数学模型的建立,通常作以下假设: (1) 电网电动势为三相平衡的正弦波电动势(a u ,b u ,c u )。
(2) 网侧滤波电感L 是线性的,且不考虑饱和。
(3) 功率开关管损耗以电阻s R 表示,即实际的功率开关管可由理想开关与损耗电阻s R 串联等效表示。
(4) 为描述VSR 能量的双向传输,三相VSR 其直流侧负载由L R 和直流电动势L e 串联表示。
当直流电动势0L e =时,三相VSR 只能运行于整流模式;当L dce v >时,三相VSR 既可运行于整流模式,又可运行于有源逆变模式;当L dc e v <时,三相VSR 则运行于整流模式。
为分析方便,定义单极性二值逻辑开关函数k s 为10k s ⎧=⎨⎩上桥臂导通,下桥臂关断上桥臂关断,下桥臂导通(,,)k a b c = (1-1)将三相VSR 功率开关管损耗等效电阻s R 和交流滤波电感等效电阻l R 合并,记 s l R R R =+,采用基尔霍夫电压定律建立三相VSR a 相回路方程为()aa a aN NO di LRi u v v dt+=-+ (1-2) 当1S 导通而2S 关断时,1a s =,且aN dc v v =;当1S 关断而2S 导通时,开关函数0a s =,且0aN v =。
【全面版】三相电压型 PWM 整流器原理及控制方法PPT文档

三相电压型 PWM 整流器系统结构图 复位电路采用按键手动复位。
两相电流 传感器
电源 模块
开关器件驱动
直流电压,电流
空基 圆间本,矢 原从量理 而P就 形W是 成M把S(VS三PV相WPWMPWM波)M。控整制流策器略输是入根端据电整压流在器复空平间面电上压转矢换量为切空换间来电控压制矢整与量流保,器护通电的S过V路一P不种W同新M的波的开形控关制状策态略组传。合感构器成8个空间矢量去逼近电压
三相电压型PWM整流
器的拓扑结构如右图所示,
其中在所示的电路中三相电
感L起滤波作用,因此交流 ua ia R
侧电流可近似认为是三相正 弦电流,C为直流侧电容,
ub ib N uc ic
R R
起稳压滤波的作用,当系统
稳定时,可保持直流母线电
压基本不变,故可看作是直
流电压源。R为线路与开关
管的等效电阻,RL为负载。
pW,pV,pU V51+ 的 MPI 接 F F u u 0 0 71C 1 1 0 C1 K 0 01R2 3 C Fu1.0 5 CFu1.0 2 T U O V 5 D 1 N 8 7G 3 N I V F 2 u C 1 1 V51+ F 76 85 u 0 1 3 C3 955PLT 43 21 CCV EGDIRB 0 4 7 R2 7 0 4 7A9U 21 1 J 2NOC MWP
- 直流侧电压
开关管交
流入侧电的压输由此可以看出, PWM整流器的交流回 路的组成有电网电源, 开关管交流侧输入电 压,交流侧电感。
空间矢量PWM(SVPWM)控制策略是根 据整流器空间电压矢量切换来控制整流器的 一种新的控制策略。基本原理就是把三相 PWM整流器输入端电压在复平面上转换为空 间电压矢量,通过不同的开关状态组合构成8 个空间矢量去逼近电压圆,从而形成 SVPWM波。
5_PWM整流电路
5.3.1 倍流整流电路
1)输出滤波电容C0值很大,iL中谐波均从C0流过,负载R0中仅流过直流 分量I0,故输出电压无纹波,即u0≡U0。 2)滤波电感L1=L2=L,无直流内阻且数值较大。
5.3.1 倍流整流电路
图5-3 图5-2b中各时区的 等效电路 a)时区A b)时区B c)时区C
5.3.2 同步整流电路
j
· UN · UAB
d)
d
· UL · UR
超前角为j
5.2.1 实际 条件 下的 电路 分析
图5-15 λ=1时 电路的电量波 形
5.2.1 网侧功 率因数λ =-1时的 电路分 析
图5-17 λ=-1时 电路的电量波形
2.三相PWM整流电路
5.2.1
PWM整流电路的工作原理
三相桥式PWM整流电路,是最基本的PWM整流电路之一,应用 最广。 工作原理和前述的单相全 T1 T3 T5 桥电路相似,只是从单相 ia ua D1 D3 D5 扩展到三相。 A L R 进行SPWM控制,在交流 ub ib s s + 负 u B C 输入端A、B和C可得 载 d uc ic SPWM电压,按图3-20a C D4 D6 D2 T4 的相量图控制,可使ia、ib、 ic为正弦波且和电压同相 T6 T2 且功率因数近似为1。 和单相相同,该电路也可 工作在逆变运行状态及图c 或d的状态。
D2
+
C2 D3 ud 负
载
a) T 1 D1 T 3 Ls us A is R s
+ B
T2
D2 T 4 D 4 b)单相全桥电路
5.2.1
PWM整流电路的工作原理
(1)单相全桥PWM整流电路的工作原理 正弦信号波和三角波相比较的方 法对图中的T1~T4进行SPWM控制, 就可以在桥的交流输入端AB产生 一个SPWM波uS。
pwm脉冲整流44页PPT

结论:在不同负载电流下,只要使us1相量的端点轨 迹沿直线CD运动,就可以使iN1与uN同相或反相。
23.11.2019
北京交通大学电气工程系
7-12
• 电量关系:
脉冲整流
设 uN(t)= UNmsinω Nt,且忽略线路电阻
– 整流工况: uS1(t) = US1m sin(ωNt-φ)
US1m = UNm / cos φ
23.11.2019
北京交通大学电气工程系
7-4
脉冲整流 • 分类:按直流侧的电压和电流情况分类
– 电压型脉冲整流器
• 特征:直流侧电压恒定 ,即:ud (t) = Ud ,并
且要求Ud 2 UN
• 输出电流
id(t)iN (u td )u (tN )(t)IU N U dN(1co 2ts )
• 基本能量关系 • uN 、 iN 和iP波形
脉冲整流
23.11.2019
北京交通大学电气工程系
7-28
脉冲整流
三相电流型脉冲整流器(GTO)
UNa
LNa
UNb
LNb
UNc
LNc
CN
Ld
Id
T1
T3
T5
A
负
B
载
C
T4
T6
T2
图7.26 三相电流型PWM整流器主电路原理图
23.11.2019
北京交通大学电气工程系
IP1m = IN1m / cos φ
– 逆变工况: iN1(t) = IN1m sin(ωNt + π ) iP1(t) = IP1m sin(ωNt + π + φ )
IN1m = UNm ωNCN / tan φ
PWM整流器
* d
+ ud
PI
id
i*a,b,c
R +
L u a ,u b ,u c
sin(t-2k/3) (k=0,1,2)
ud
负载
电
力
电
子
技
术
PWM整流电路的控制方法
电
力
电
子
技
术
PWM整流电路的应用(电池化成)
交流 电网 380V 变压器 380V / 24 V
AC/DC双 向变流器
icf ibf iaf
IPM Cdc1 Cdc2
电
力
电
子
技
术
三相四线制APF
ea(t)
PLL sin( t )
sin( t - 2 /3) sin( t - 4 /3)
ia(t) ib(t) ic(t)
乘法器 乘法器 乘法器
2 LPF 2 2
乘法器 乘法器 乘法器
-
iha(t)
ia,b,c u*d + ud PI id i*a,b,c R + L u a ,u b ,u c sin(t-2k/3) (k=0,1,2) ud
负载
电
力
电
子
技
术
PWM整流电路的控制方法
• ia* ,ib* 和ic*分别和各自的电源电压同相位,其幅值 和反映负载电流大小的直流信号id成正比,这是整流器 运行时所需的交流电流指令信号。 •指令信号和实际交流电流信号比较后,通过PI或滞环对 器件进行控制,便可使实际交流输入电流跟踪指令值
ia,b,c PI
ua, b,c + ud +
PWM整流

主讲人:
5.5
电压型三相桥式PWM整流电路
5.5.1 电路工作原理分析 5.5.2 电路的控制 5.5.3 输出直流电压的估算
5.5 电压型三相桥式PWM整流电路
电压型三相半桥式整流电路的主电路如图5-21所示, 和单相比较,三相半桥电路是单相桥式电路的扩展。
图5-21
(5-137)
电网各相电流基波:
i A1 I m cos( t ) iB1 I m cos( t iC 1 I m 2 ) 3 2 cos( t ) 3
(5-138)
式中,是相电流基波对相电压的相位角。 迄今为止的分析仅涉及 =0或 =π rad,其实电路可在 为任 意值下运行,为更全面了解本电路,设基波相位角为 <0(电流滞 后)。
I Am sin(Tc ) i A Tc Tc
由上述应有 :
I Am sin(Tc ) U0 Tc 3 LN
解出:
LN
U 0Tc 3 I Am sin(Tc )
(5-135)
上式(5-135式)为LN的上限值。
5.5.2 电路的建的三相控制电路结构,它与图5-20 相仿,采用电压外环和电流内环的双闭环格局和电流直间控制策略。
diA u A0 u a 0 U Nm sin t K aU 0 dt
(5-130)
3)各相输入电流的变率为时变值:仍以a相为例,由式(5-130)有:
diA 1 (U Nm sin t K aU 0 ) dt LNa
(5-131)
由于K>>1,上式表明,在相邻的载波周期中,diA/dt随Ka即ua0的更迭而变; 在整个电网周期中,diA/dt则随uA0而变。
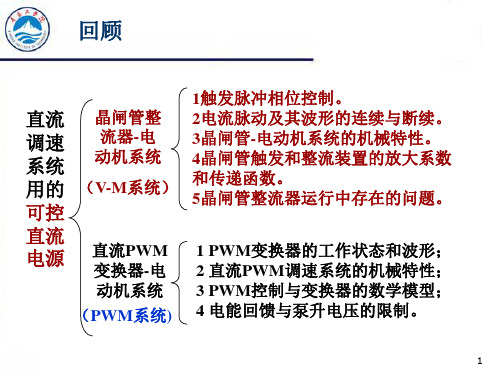
第2章第2讲直流PWM变换器-电动机系统参考文档
s nN 100 % n0
式中 nN = n0 - nN 静差率是用来衡量调速系统在负载变化时转速的稳定度的。 调速范围和静差率两个指标合称调速系统的稳态性能指标。
27
2、静差率s
s nN 100 % n0
机械特性越硬,静差率就
越小,转速的稳定度越高。
➢ 特性a和b的硬度相同, ➢ 特性a和b额定速降相同, ➢ 特性a和b的静差率不相同。
21
4. 电能回馈与泵升电压的限制
泵升电压限制
在大容量或负载有较大惯量的系统中,不可能只靠电容器来
限制泵升电压,这时,可以采用下图中的镇流电阻 Rb 来消耗 掉部分动能。分流电路靠开关器件 VTb 在泵升电压达到允许数 值时接通。
+
UUss
+ CC
过电压信号
RRbb VVTTbb
-
泵升电压限制电路
PWM变换器电路有多种形式,总体上可分为不 可逆与可逆两大类。
脉宽调制(PWM-Pulse Width Modulation)
4
(1). 不可逆PWM变换器
①简单的不可逆PWM变换器 简单的不可逆PWM变换器-直流电动机系统
主电路原理图如下图所示,功率开关器件VT 可以是任意一种全控型开关器件,这样的电路 又称直流降压斩波器(buck变换器)。
2
2.1.2 直流PWM变换器-电动机系统
主要研究问题 1 PWM变换器的工作状态和波形; 2 直流PWM调速系统的机械特性; 3 PWM控制与变换器的数学模型; 4 电能回馈与泵升电压的限制。
3
1.PWM变换器的工作状态和电压、电流波形
脉宽调制(PWM)变换器的作用是:用脉冲宽度调 制的方法,把恒定的直流电源电压调制成频率一 定、宽度可变的脉冲电压序列,从而可以改变平 均输出电压的大小,以调节电动机转速。
PWM整流电路及其控制方法
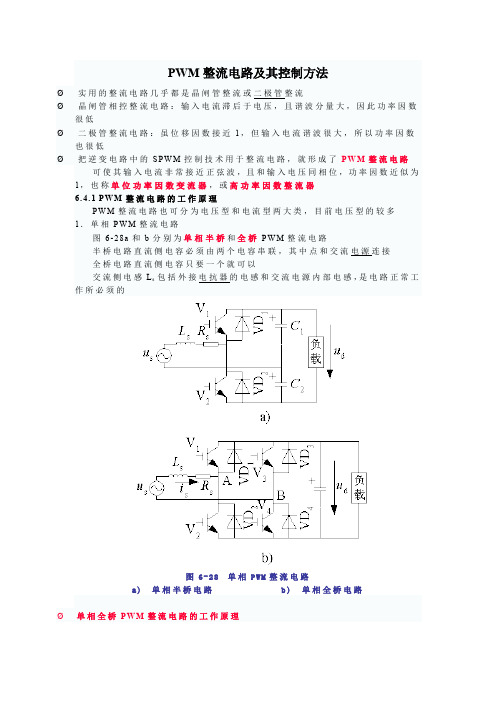
PWM整流电路及其控制方法Ø 实用的整流电路几乎都是晶闸管整流或二极管整流Ø 晶闸管相控整流电路:输入电流滞后于电压,且谐波分量大,因此功率因数很低Ø 二极管整流电路:虽位移因数接近1,但输入电流谐波很大,所以功率因数也很低Ø 把逆变电路中的S P W M控制技术用于整流电路,就形成了P W M整流电路可使其输入电流非常接近正弦波,且和输入电压同相位,功率因数近似为1,也称单位功率因数变流器,或高功率因数整流器6.4.1 P WM整流电路的工作原理P W M整流电路也可分为电压型和电流型两大类,目前电压型的较多1.单相P W M整流电路图6-28a和b分别为单相半桥和全桥P W M整流电路半桥电路直流侧电容必须由两个电容串联,其中点和交流电源连接全桥电路直流侧电容只要一个就可以交流侧电感L s包括外接电抗器的电感和交流电源内部电感,是电路正常工作所必须的图6-28单相P W M整流电路a)单相半桥电路b)单相全桥电路Ø 单相全桥P WM整流电路的工作原理正弦信号波和三角波相比较的方法对V1~V4进行SP W M控制,就可在交流输入端AB产生SP W M波u A Bu A B中含有和信号波同频率且幅值成比例的基波、和载波有关的高频谐波,不含低次谐波由于L s的滤波作用,谐波电压只使i s产生很小的脉动当信号波频率和电源频率相同时,i s也为与电源频率相同的正弦波u s一定时,i s幅值和相位仅由u A B中基波u A B f的幅值及其与u s的相位差决定改变u A B f的幅值和相位,可使i s和u s同相或反相,i s比u s超前90°,或i s 与u s相位差为所需角度Ø 相量图(图6-29)a:滞后相角d,和同相,整流状态,功率因数为1,P W M 整流电路最基本的工作状态b:超前相角d,和反相,逆变状态,说明P W M整流电路可实现能量正反两方向流动,这一特点对于需再生制动的交流电动机调速系统很重要c:滞后相角d,超前90°,电路向交流电源送出无功功率,这时称为静止无功功率发送器(Sta t ic V a r Ge ne r a to r—SV G)d:通过对幅值和相位的控制,可以使比超前或滞后任一角度j图6-29P W M整流电路的运行方式相量图a)整流运行b)逆变运行c)无功补偿运行d)超前角为Ø 对单相全桥P WM整流电路工作原理的进一步说明整流状态下u s> 0时,(V2、V D4、V D1、L s)和(V3、V D1、V D4、L s)分别组成两个升压斩波电路,以(V2、V D4、V D1、L s)为例V2通时,u s通过V2、V D4向L s储能V2关断时,L s中的储能通过V D1、V D4向C充电u s< 0时,(V1、V D3、V D2、L s)和(V4、V D2、V D3、L s)分别组成两个升压斩波电路由于是按升压斩波电路工作,如控制不当,直流侧电容电压可能比交流电压峰值高出许多倍,对器件形成威胁另一方面,如直流侧电压过低,例如低于u s的峰值,则u A B中就得不到图6-29a中所需的足够高的基波电压幅值,或u A B中含有较大的低次谐波,这样就不能按需要控制i s,i s波形会畸变可见,电压型P W M整流电路是升压型整流电路,其输出直流电压可从交流电源电压峰值附近向高调节,如要向低调节就会使性能恶化,以至不能工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对上式进行从 t k 到
U
AV r
t k 1的周期平均
dis ( Ls Rs i s )dt dt Rs TPWM
u r u s ( Ls u r u s
U
AV s
1 TPWM Ls TPWM
t k 1
tk
dis Rs i s ) dt dis ( Ls Rs i s ) dt
U sAV
[i s (t k 1 ) i s (t k )]
t k 1
tk
i s dt
U
AV r
U U
AV s
1 TPWM Ls TPWM
t k 1
tk
( Ls
dis dt
Rs i s )dt Rs TPWM
AV s
[i s (t k 1 ) i s (t k )]
is (t k 1 ) i (t k 1 )
* s
* is (t k 1 ) is (t k 1 )
这样就得到四象限变流器预测电流控制表达式
u
* r
U
AV s
Ls TPWM
[i (t k 1 ) is (t k )]
* s
u
* r
U
AV s
Ls TPWM
usa
cos
is*
+ -
is
TPWM Ls TPWM
2
usa
usb
U
3/2 变换 计算
AV s
+
-
* ur
* ur
空间矢 量调制
PWM 1 PWM 2 PWM 3
usc
U sAV +
驱动 电路
T1 T2 T3 T4 T5 T6
控制系统原理图
4
预测电流控制的特点
保持了滞环电流控制响应速度快的特点,实际电流 能在一个开关周期内跟踪上指令电流。 由于控制周期固定,器件的开关频率固定。 控制系统中只有一个PI调节器,参数整定简单。
预测电流控制原理及软件实现
1.预测电流控制原理:
在两相静止坐标系(αβ)下的数学模型表达式
dI s U r U s ( Ls Rs I s ) dt
用α,β分量形式表示为
u r u r dis u s ( Ls Rs i s ) dt dis u s ( Ls Rs i s ) dt
t k 1
tk
i s dt
忽略电阻
u
* r
Rs ,得到桥臂中点指令电压
Ls TPWM [is (t k 1 ) is (t k )]
U
AV s
* AV ur U s
Ls TPWM
[is (t k 1 ) is (t k )]
假设电网电流能在一个控制周期内跟踪上指令电流, t k 1 即在 时刻
软件实现:
主程序:
CPU初始化
初始化 检测直流电压 是否充电完成 检测BC电压 过零点 启动定时器 开全局中断 禁止PWM输出 主循环
IO初始化 EV初始化 CAN初始化 变量初始化
定时器中断:
关全局中断 看门狗复位 判断是否为 短路保护
是否启动
否 是
AD采样 误差补偿 相位检测
电网电压计算 交流电压3/2变换 直流电压 平均值滤波 直流电压 过压欠压保护 开放PWM输出
Udc给定计算 电压环PI 计算 交流电流计算 过流保护检测 交流电流3/2变换 交流电流给定计算
电感电压计算 桥臂中点电压计算 电压矢量扇区计算 电压矢量脉冲 比较值计算 SVPWM输出
变量初始化 AD采样直流电压 开全局中断 中断返回
开全局中断 中断返回
[is* (t k 1 ) is (t k )]
* AV ur U s
Ls TPWM
[is (t k 1 ) is (t k )]
i sb i sa i sc
1
2
U dc U ref
3
+
PI调 节器
* I amp
3/2变换
Hale Waihona Puke sin相位 检测i
* s +
is
Ls