清华大学理论力学惯量矩阵分析解析
理论力学 12 动量矩定理

轴转动(zhuàn dòng)。已知均质杆 OA 长为 l ,质 C1 量为 m 1,均质圆盘 C 2 的半径为 r ,质量为 m 2,
试求复摆对 O 轴的动量矩。
A
C2 r
解: J O 的计算(jìsuàn):
JO
1 12
m1
l
2
m1
l 2
2
1 2 m2
r2
m2
l
r
2
图 12-9
由几何关系知: r R h z
h 薄圆片对 y 轴转动惯量 d J y 为:
1 r2 dm 4
精品资料
dJ y
1 4
r 2dm
z 2dm
1 4
r2
z2
r 2dz
1
4
R4 h4
h
z 4
R2 h2
h
z 2
z2
dz
整个(zhěnggè)圆锥体对于 y 轴的转动惯量为:
J y
h 0
1 4
底圆直径的转动惯量。已知圆锥体质量为 M ,
z
底圆半径为 R ,高为 h ,如图12-6所示。 r
h z dz
解:把圆锥体分成许多(xǔduō)厚度为 d z 的薄圆片,该薄圆片的质量为
d m r2d z
为圆锥体的密度,r为薄圆片的半径。
O
y
R
x
图 12-6
圆锥体的质量为
M 1R2h
3
薄圆片对自身直径的转动惯量为
精品资料
12.1 转动惯量、平行(píngxíng) 轴定1理2.1.1 转动惯量
质点系的运动,不仅(bùjǐn)与作用在质点系上的力有关, 还与质点系各质点的质量其及分布情况有关。质心是描述质 点系质量分布的一个特征量,转动惯量(Moment of inertia)则 是描述质点系质量分布的另一个特征量。
清华大学理论力学lecture08_131809805
定:FAy 与 FCy !
A
C
FAy FAx
A
FCy
FCx
C
B
D
yl
x z
FD D
B 超静定结构!
E
刚体模型无法求解超静定结构的所有约束力,需要采用变形体模型。
由两个或两个以上刚体组成的系统,称为刚体系统。刚体系统 平衡问题的特点是:仅仅考察系统整体平衡,无法求得全部未知力。
例:如图所示的结构由AC、CD、DE和BE四部分组成,载荷及尺 寸如图。求A、B、C处的约束力。
S6 2qa
B
NB
将处于平衡状态的变形体更换为刚体则平衡状态不变 F1
F3
。这个结论称为硬化原理。换句话说变形体平衡时其
所受力系满足主矢为零、对任一点的主矩为零。
例:已知四连杆机构ABCD 受
力P、Q 作用。试分析机构平
衡时P、Q 的关系。
D
A
450 900
Q
B
300 600
P
C
F2 F4 y
x z
FD D
FAx=-2FD 解毕! C
例题:图示结构,已 知 : FP、l、r 求: 固定端 A和铰E 二处约束力。
解:解除约束,画整体和杆BEC
的受力分析图,如图所示。
l
讨论:如何求 FDE 及 M A ?
B
1.5l
C
E
ll
l
B
Cr
E
D
y
x
z
FC
A
杆DE为二
D 力构件!
2FC
A FAx
MA
FAy
FBy FBx
解: 解除约束,画受力分析 图。DA和BC为二力构件。
【精品】理论力学11动量矩定理分析解析幻灯片

0 Fox m2l amgFOy
FOymgm2lam 4g
§11-4 刚体对轴的转动惯量
一.定义: Jz miri2
z
i
对于质量连续分布的刚体,上式可写成积分
形式
Jz r2 dm
由定义可知,转动惯量不仅与 质量有关,而且与质量的分布有关;
ri
vi
mi
在国际单位制中,转动惯量的单位
是: kg·m2。同一刚体对不同轴的转
Jz mz2
回转半径的几何意义是:假想地将物体的质量集 中到一点处,并保持物体对轴的转动惯量不变,则该 点到轴的距离就等于回转半径的长度。
3、平行轴定理
定理:刚体对于任一轴的转动惯量,等于刚体 对于通过质心、并与该轴平行的轴的转动惯量,加 上刚体的质量与两轴间距离平方的乘积,
zC
z1
m
C
Jz1 JzC md2
dLO dt
MO(Fi(e))
若 Mz(F(e))0,则 Lz 常量。
dLz dt
Mz (Fi (e) )
例 高炉运送矿石的卷扬机如图。已知鼓轮的半径为R,质量 为m1,绕O轴转动。小车和矿石的总质量为m2。作用在鼓轮上
的力偶矩为M,鼓轮对转轴的转动惯量为J,轨道倾角为a。
设绳质量和各处摩擦不计,求小车的加速度a。
O u
A
mg
mg
解:以系统为研究对象,受力如图。
由于SMO(F (e))=0,且系统初始静止,所以LO=0。
设重物A上升的速度为v,则人的绝对速度va的大小为
va uv
v
LOmarvmv0 r
FOy
O
FOx
u
A mg mg
L Om (uv)rm v0r
第八章 通信系统的矩阵几何解析法
(moments)
2001-4-25
牛志升@清华大学
19
M/E2/1排队系统的求解
?嵌入马尔可夫过程
?确定马尔可夫性成立的嵌入点(顾客退去时刻) ?针对嵌入点建立马尔可夫平衡方程式 ?导入状态变量(退去时刻队列长度)的概率母函
数 ?求出队列长度的z变换及其特征量(moment) ?求出等待时间的LST及其特征量(moment)
1,2
A1 B2 B1 1
λ
A0
2,2
A1 A2 2
λ
3,2
A1 A0 A2 3
λ
A0 A2
23
0
2001-4-25
牛志升@清华大学
PH/M/s排队系统的矩阵几何解(1)
2001-4-25
牛志升@清华大学
24
PH/M/s排队系统的矩阵几何解(2)
2001-4-25
牛志升@清华大学
25
PH/M/s排队系统的矩阵几何解(3)
2,2
μ2 μ1 μ2
?
λ 状态转移率(Q)矩阵
μ2
λ
3,2
λ
2001-4-25
牛志升@清华大学
18
M/E2/1排队系统的求解
?多维马尔可夫过程
?多维线性方程式组(pQ=0 & pe=1) ?导入概率母函数使之转化为一维线性方程式 ?求解出状态变量(队列长度)的概率母函数 ?通过微分得出状态变量(队列长度)的矩
2001-4-25
牛志升@清华大学
11
矩阵几何法的基本定理(3)
2001-4-25
牛志升@清华大学
12
M/PH/1排队系统的矩阵几何解(1)
2001-4-25
清华大学版理论力学课后习题答案大全-----第5章点的复合运动分析
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴30=φ。
求此时滑转动。
当机构在图示位置时,曲柄与水平线交角杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v += πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 将(1)、(2)式相除,得: 2.摇杆转动方程:5-4 曲柄摇杆机构如图所示。
已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。
试求当O 1A 水平位置时,杆BC 的速度。
解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
清华大学版理论力学课后习题答案大全第10章动能定理及其应用习题解

CA(a)ωO(a)第10章动能定理及其应用10-1计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A、B 两点的速度方向如图示,B 点的速度为v B ,θ =45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v (图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.2222221632(2121)2(212121B B B C C C mv r v mr v m J mv T =⋅+=+=ω2.222122222214321(21212121vm v m r v r m v m v m T +=⋅++=3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a )BA T T T +=)2121(21222211ωC C J v g W v g W ++=21221121212211122]cos 22)2[(22ωϕω⋅⋅+⋅++++=l g W l l v l v l g W v g W ]cos 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
曲柄的重力为Q F ,角速度为ω,齿轮可视为匀质圆盘。
试求行星齿轮机构的动能。
理论力学(哈工大版)第十二章动量矩定理(全面版)资料

理论力学(哈工大版)第十二章动量矩定理(全面版)资料第八章 动量矩定理8-1 质点系的动量矩(待强化) 一.动量矩的概念质点对点O 的动量矩:v m r v m m O ⨯=)( 质点对轴 z 的动量矩:)()(xy O z v m m v m m = 对着轴看:顺时针为负 逆时针为正质点对点O 的动量矩与对轴z 的动量矩之间的关系:[])( )(v m m v m m z z O = kg·m2/s 。
二.质点系的动量矩 质系对点O 动量矩:i i i i i OO v m r v m mL ⨯==∑∑)(质系对轴z 动量矩:[]z Oii zz L v m m L)(==∑三.质点系的动量矩的计算c c c mv r L L ⨯+=0质点系对任意定点O 的动量矩,等于质点系对质心的动量矩,与将质点系的动量集中于质心对于O 点动量矩的矢量和。
质点系对质心的绝对运动动量矩,等于质点系对随质心平动的参考系的相对运动动量矩。
结论:在计算质点系对于质心的动量矩时,用质点相对于惯性参考系的绝对速度vi ,或用质点相对于固结在质心上的平动参考系的相对速度vi `,所得结果是一样的。
四、刚体的动量矩 1.平动刚体C C C O O v m r v m m L ⨯==)( )(C z z v m m L =2.定轴转动刚体ωZ z J L =3.平面运动刚体C C C C C O m m L v O C L v r L +⨯=+⨯= ω⋅+=C C z z J v m m L )(平面运动刚体对垂直于质量对称平面的固定轴的动量矩,等于刚体随同质心作平动时质心的动量对该轴的动量矩与绕质心轴作转动时的动量矩之和。
8-2 动量矩定理(待强化) 一.质点的动量矩定理)()]([ , )(F m v m F r v r O O m dtdm dt d =⨯=⨯ 质点对任一固定点的动量矩对时间的导数,等于作用在质点上的力对同一点之矩。
清华大学大学物理转动定律转动惯量
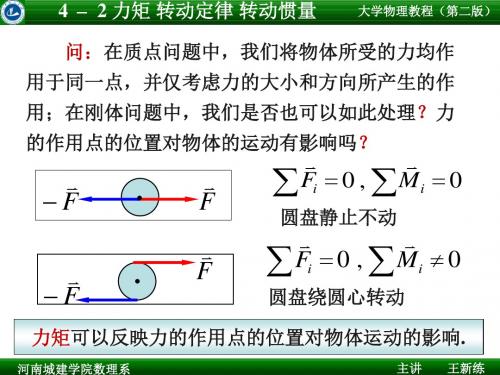
4 – 2 力矩 转动定律 转动惯量
大学物理教程(第二版)
飞轮的质量为什么 大都分布于外轮缘?
河南城建学院数理系 主讲
竿 子 长 些 还 是 短 些 较 安 全 ?
王新练
4 – 2 力矩 转动定律 转动惯量
大学物理教程(第二版)
例1 如图, 有一半径为 R 质量为 的匀质圆 m 盘, 可绕通过盘心 O 垂直盘面的水平轴转动. 转轴与圆 盘之间的摩擦略去不计. 圆盘上绕有轻而细的绳索, 绳 的一端固定在圆盘上, 另一端系质量为 m 的物体. 试求 物体下落时的加速度、绳中的张力和圆盘的角加速度.
例2 有一半径为R质量为 m 匀质圆盘, 以角速度ω 0绕 通过圆心垂直圆盘平面的轴转动.若有一个与圆盘大小相 同的粗糙平面(俗称刹车片)挤压此转动圆盘,故而有正压 力N 均匀地作用在盘面上, 从而使其转速逐渐变慢.设正 压力N 和刹车片与圆盘间的摩擦系数均已被实验测出.试 问经过多长时间圆盘才停止转动? 解: 在圆盘上取面积微元, 面积元所受对转轴的摩擦力矩 大小
圆盘静止不动
Fi 0 , Mi 0
圆盘绕圆心转动
力矩可以反映力的作用点的位置对物体运动的影响.
主讲 王新练
4 – 2 力矩 转动定律 转动惯量
大学物理教程(第二版)
一
力矩
刚体绕 O z 轴旋转 , 力
且在转动平面内, r 为由点O 到力的作用点 P 的径 矢. M F 对转轴 Z 的力矩 z F M r F M r * M Fr sin Fd O P
4 – 2 力矩 转动定律 转动惯量 转动定律
大学物理教程(第二版)
M J
J mi ri
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x
y
A
y0
Je eT JOe
Je J xl2 J ym2 Jzn2 2J xylm 2J yzmn 2J zxnl
转轴:研究不同坐标系中惯性矩阵的关系
第12章
三 维 刚 体 动 力 学 基 础
旧系Oxyz —A 新系O'x'y'z' i = iA Aij ii ij
ri AT ri
JO mi (ri2E ririT ) mi (ri2E AT ririT A) AT mi (ri2E ririT ) A
z
z
O
x x
mi
ri y
y
JO AT JO A
若保持坐标原点不变,改变坐标轴相对于物 体的方位,则惯性矩阵的元素将随之变化。
主轴坐标系
在惯性矩阵中, 若 Jxy = Jyx = 0; Jzx = Jxz = 0; Jzy = Jyz = 0 则Oxyz称为主轴坐标系,三轴称为惯性主 轴, Jx , J y , Jz 称为主转动惯量。惯性矩阵为
Jx 0 0 J 0 Jy 0
0 0 Jz
若点O与质心C重合,则轴Cx、Cy、Cz称为 中心惯性主轴,相应的转动惯量Jx、Jy、Jz 称为中心主转动惯量。
0
1 4
mR
2
0
0
1 2
0 mR2
z
c
y
a
b
J
C
1 12
m(b2 0 0
c2
)0
1 12
m(a
2
0
c
2
0
)0 112m(a2
b2
)
第12章
三 维 刚 体 动 力 学 基 础
思考题 - 用几何法确定中心惯性主轴
x
y
z
JC
1 12
mL2 0 0
移心:研究对两点的转动惯量的关系
第12章
三 维 刚 体 动 力 学 基 础
ri ρi s ri i s
JO mi (ri2 E ri riT ) mi[(i s)T (i s)E (i s)(i s)T ]
mi[(i2 iT s sT i s2 )E (i iT i sT siT ssT )]
mi yi zi 0
如果均质刚体有对称轴, 则此轴是轴上各点的惯性 主轴
x mi
xi
z i
0
mi yi zi 0
z1 z2 对称面 o1 o2 P
z 对称轴
y
思考题 - 用几何法确定中心惯性主轴
第12章
三 维x 刚 体 动 力 学x 基 础
z
y JC
1 4
mR2 0
0
0
1 12
mL2
0
0 00
z
x
y
JC
2 5
mR2 0
0
0
2 5
mR2
0
0
2 5
0 mR
2
第12章
三 维 刚 体 动 力 学 基 础
确定惯性主轴的解析方法—特征值问题
矢量LO与一般不共线: LO = JO 如果沿某一惯性主轴z: = z k
LO=Jz — LO与共线
第2节
惯量矩阵
2020年2月29日
第12章
三 维 刚 体 动 力 学 基 础
对过O点任意轴e的转动惯量
e l m nT
Je midi2
z0
mi
mi[ri2 (e ri )(ri e)] z ri di
mi[eT ri2Ee eT ririTe]
e
O
eT mi[ri2E ririT ]e x0
LO = Jx x i + Jy y j + Jz z k
求任意点惯量矩阵的一般方法是:先求出中 心主轴坐标系中的惯量矩阵,再用移心和转 轴变换求解。
第12章
三 维 刚 体 动 力 学 基 础
确定惯性主轴的几何方法
如果均质刚体有对称平面,
则平面上某点的惯性主轴 之一必与平面垂直
mi xi zi 0
惯性主轴。
第12章
三 维 刚 体 动 力 学 基 础
返回
JO JC m(s2E ssT )
Jo J c J m (Jm 为质心C对O的惯量矩阵)
J z J z md 2
(转动惯量的移轴公式)
J xy J xy msxsy
Z
z mi
在若干平行轴中,刚体对通
过质心之轴的转动惯量最小
O
X
ri s
ρi
y
xC
Y
第12章
三 维 刚 体 动 力 学 基 础
LO =
LO = JO
JO = — 惯性矩阵的特征值问题
J x J xy J xz x
y
0
J zx J zy J z z
JO是实对称阵,必存在三个实特征值(即 为主转动惯量),相应的特征向量就是三个