陀螺仪主要性能指标
k8陀螺仪 参数
k8陀螺仪参数摘要:I.引言A.介绍K8陀螺仪B.陀螺仪参数的重要性II.K8陀螺仪的主要参数A.角速度传感器1.测量范围2.测量精度B.加速度传感器1.测量范围2.测量精度C.电源1.电压2.电流D.外观尺寸1.长度2.宽度3.高度III.参数对K8陀螺仪性能的影响A.角速度传感器参数对性能的影响B.加速度传感器参数对性能的影响C.电源参数对性能的影响D.外观尺寸对性能的影响IV.如何选择适合的K8陀螺仪A.根据需求选择合适的参数B.考虑价格和性能的平衡C.参考其他用户的使用经验V.结论A.总结K8陀螺仪的参数特点B.强调选择合适参数的重要性正文:K8陀螺仪是一款非常受欢迎的陀螺仪产品,它具有许多优秀的参数特性。
在选择K8陀螺仪时,了解其参数是非常重要的,因为这些参数直接影响着陀螺仪的性能。
本文将详细介绍K8陀螺仪的主要参数,并分析这些参数对性能的影响,希望能帮助您选择到最适合的K8陀螺仪。
首先,我们来看K8陀螺仪的主要参数。
角速度传感器是陀螺仪的核心部件之一,它负责测量物体的角速度。
K8陀螺仪的角速度传感器具有较高的测量范围和精度,能够满足大多数应用场景的需求。
加速度传感器也是K8陀螺仪的重要组成部分,它可以帮助陀螺仪测量物体的加速度。
K8陀螺仪的加速度传感器同样具有较高的测量范围和精度。
此外,K8陀螺仪还具有稳定的电源系统,可以提供合适的电压和电流,保证陀螺仪的正常工作。
最后,K8陀螺仪的外观尺寸较小,便于安装和使用。
了解了K8陀螺仪的主要参数之后,我们来看看这些参数对性能的影响。
角速度传感器和加速度传感器的测量范围和精度直接影响着陀螺仪的测量能力,较高的测量范围和精度可以使陀螺仪更加稳定和准确。
电源系统对陀螺仪的性能也有很大影响,合适的电压和电流可以保证陀螺仪的正常工作,提高其稳定性和可靠性。
外观尺寸则影响着陀螺仪的安装和使用便利性,较小的尺寸可以使陀螺仪更容易安装在各种设备上,方便用户使用。
mems陀螺仪指标

MEMS陀螺仪可以通过许多指标进行评估。
以下是一些常见的指标:
1.测量范围:是指陀螺仪可以测量的最大旋转速率或最大旋转角度。
它通常以度/秒为单位表示。
2.灵敏度:是指陀螺仪输出的每个单位(即每个度/秒)的电压或数字输入,通常以mV/度/秒或LSB/deg/sec为单位。
3.漂移:是指陀螺仪在没有旋转或运动时产生的电压或数字变化。
它通常以度/小时或度/秒为单位表示。
4.零偏:是指陀螺仪输出的电压或数字值,即使在没有旋转或运动的情况下,也会存在一些偏差。
它通常以度/秒为单位表示。
5.频率响应:是指陀螺仪对旋转速率变化的响应时间,它通常以Hz为单位表示。
6.噪声:是指陀螺仪输出的随机变化,通常以mV或LSB为单位表示。
噪声越低,陀螺仪的性能越好。
7.温度漂移和灵敏度漂移:是指陀螺仪在不同温度下的输出变化程度,它通常以度/小时或度/秒为单位表示。
这些指标可以帮助评估MEMS陀螺仪的性能,在选择和设计陀螺仪时非常重要。
60型光纤陀螺仪技术指标
60型光纤陀螺技术指标
1 技术指标
a)最大输入角速率:±400º/s;
b)零偏稳定性:≤0.3º/h(1σ);
c)零偏重复性:≤0.3º/h(1σ);
d)随机游走系数:≤0.05º/h1/2;
e)标度因数非线性度:≤300ppm;
f)标度因数不对称性:≤300ppm;
g)标度因数重复性:≤300ppm;
h)带宽:≥100Hz(设计值);
i)工作温度:-40℃~+65℃;
j)RS422 输出
2 陀螺工作电源
±5V供电,电源精度5%,电源纹波不大于20mV。
全温电源最大冲击电流 1.2A。
常温稳态功耗不大于 2.5W,全温稳态功耗不大于3.5W。
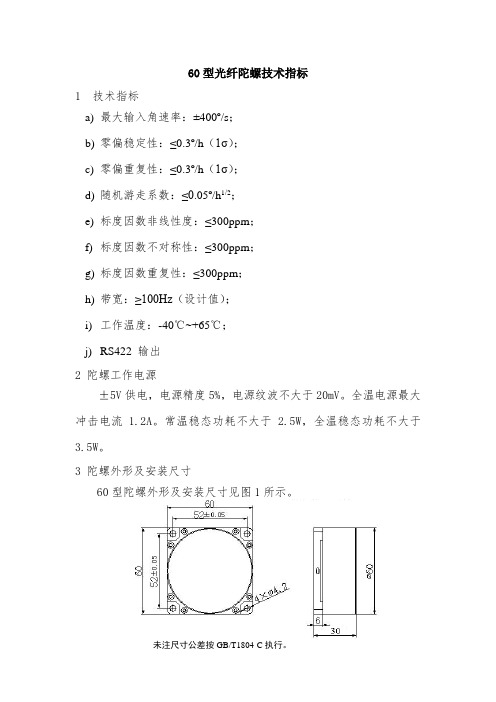
3 陀螺外形及安装尺寸
60型陀螺外形及安装尺寸见图1所示。
未注尺寸公差按GB/T1804-C执行。
图1 FOG-60型光纤陀螺外形和安装尺寸
4 电气接口
4.3.1 接口定义
陀螺输出采用J30J-15ZKP连接器,节点定义见表1。
4.3.2 接口类型
RS-422数字串行口,采用异步串行标准双工RS-422电气接口标准。
4.3.3 通讯协议
a)波特率:115.200kbps;
b)通讯帧格式
每帧包含11位,顺序为:
起始位1位
数据位8位(先发送低后高)
偶校验位1位
停止位1位
c)通讯规则
陀螺采用广播式发数,数据更新1ms。
数据帧格式见2。
角速率数据三字节采用补码格式,角速率转换量纲为30000 LSB/[º/s](或见产品证明书),转换示例见表3。
MEMS陀螺仪的简要介绍(性能参数和使用)

MEMS陀螺仪的简要介绍(性能参数和使用)MEMS传感器市场浪潮可以从最早的汽车电子到近些年来的消费电子,和即将来到的物联网时代。
如今单一的传感器已不能满足人们对功能、智能的需要,像包括MEMS惯性传感器、MEMS环境传感器、MEMS光学传感器、甚至生物传感器等多种传感器数据融合将成为新时代传感器应用的趋势。
工欲善其事,必先利其器,这里就先以MEMS陀螺仪开始,简要介绍一下MEMS陀螺仪、主要性能参数和使用。
传统机械陀螺仪主要利用角动量守恒原理,即:对旋转的物体,它的转轴指向不会随着承载它的支架的旋转而变化。
MEMS陀螺仪主要利用科里奥利力(旋转物体在有径向运动时所受到的切向力)原理,公开的微机械陀螺仪均采用振动物体传感角速度的概念,利用振动来诱导和探测科里奥利力。
MEMS陀螺仪的核心是一个微加工机械单元,在设计上按照一个音叉机制共振运动,通过科里奥利力原理把角速率转换成一个特定感测结构的位移。
以一个单轴偏移(偏航,YAW)陀螺仪为例,通过图利探讨最简单的工作原理。
两个相同的质量块以方向相反的做水平震荡,如水平方向箭头所示。
当外部施加一个角速率,就会出现一个科氏力,力的方向垂直于质量运动方向,如垂直方向箭头所示。
产生的科氏力使感测质量发生位移,位移大小与所施加的角速率大小成正比。
因为感测器感测部分的动电极(转子)位于固定电极(定子)的侧边,上面的位移将会在定子和转子之间引起电容变化,因此,在陀螺仪输入部分施加的角速率被转化成一个专用电路可以检测的电子参数---电容量。
下图是一种MEMS陀螺仪的系统架构,,陀螺仪的讯号调节电路可以分为马达驱动和加速度计感测电路两个部分。
其中,马达驱动部分是透过静电引动方法,使驱动电路前后振动,为机械元件提供激励;而感测部分透过测量电容变化来测量科氏力在感测质量上产生的位移。
当然,MEMS陀螺仪还具有其它功能模块,比如自检功能电路,低功耗以及运动唤醒电路等等。
下面主要介绍MEMS陀螺仪的主要性能参数。
光纤陀螺仪指标(国军标)1资料
光纤陀螺仪测试方法1范围本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。
2规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB321-1980优先数和优先系数CB998低压电器基本实验方法GJB585A-1998惯性技术术语GJB151军用设备和分系统电磁发射和敏感度要求3术语、定义和符号GJB585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1术语和定义3.1.1干涉型光纤陀螺仪interferometric fiber optic gyroscope仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
3.1.2陀螺输入轴input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
3.1.3标度因数非线性度scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3.1.4零偏稳定性bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
3.1.5零偏重复性bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。
光纤陀螺仪性能指标
光纤陀螺仪性能指标
光纤陀螺仪性能指标
1、零偏和零漂
零偏是输入角速度为零(即陀螺静止)时陀螺仪的输出量,用规定时间内测得的输出量平均值对应的等效输入角速度表示,理想情况下为地球自转角速度的分量。
零漂即为零偏稳定性,表示当输入角速率为零时,陀螺仪输出量围绕其零偏均值的离散程度,用规定时间内输出量的标准偏差对应的等效输入角速率表示。
零漂是衡量FOG(光纤陀螺)精度的最重要、最基本的指标。
产生零漂的主要因素是沿光纤分布的环境温度变化在光纤线圈内引入的非互易性相移误差。
通常为了稳定零漂,常需要对IFOG进行温度控制或者温度补偿。
另外偏振也会对零漂产生一定的影响,在IFOG中常采用偏振滤波和保偏光纤的方法消除偏振对零漂的影响。
2、标度因数
标度因数是陀螺仪输出量与输入角速率的比值,在坐标轴上可以用某一特定直线斜率表示,它是反映陀螺灵敏度的指标,其稳定性和精确性是陀螺仪的一项重要指标,综合反映了光纤陀螺的测试和拟合精度。
标度因数的稳定性无量纲,通常用百万分比(ppm)表示。
标度因数的误差主要来源于。
70光纤陀螺仪指标
70光纤陀螺仪指标70光纤陀螺仪的主要技术指标包括:1. 零偏稳定性:这是衡量陀螺仪在无外力作用下的输出漂移量,通常以角度/小时为单位。
根据提供的信息,零偏稳定性为0.2°/hr(1σ)。
2. 动态范围:这是陀螺仪能够测量的最大和最小角速度范围,通常以度/秒为单位。
根据提供的信息,动态范围为±300°/s。
3. 零偏重复性:这是衡量陀螺仪在多次启动和运行中零点输出的可重复性,通常以角度/小时为单位。
根据提供的信息,零偏重复性为0.2°/hr(1σ)。
4. 带宽:这是陀螺仪的响应速度,即角速度变化时,陀螺仪输出达到稳定值所需的时间。
根据提供的信息,带宽≥200Hz。
5. 随机游走系数:这是衡量陀螺仪随机误差的参数,通常以角度/√小时为单位。
根据提供的信息,随机游走系数为0.02°/√hr。
6. 工作温度:这是陀螺仪正常工作的环境温度范围。
根据提供的信息,工作温度为-40℃~+60℃。
7. 储存温度:这是陀螺仪可以安全存放的环境温度范围。
根据提供的信息,储存温度为-50℃~+70℃。
8. 振动条件:这是陀螺仪可以承受的振动强度和频率范围。
根据提供的信息,振动条件为4.2g,20Hz~2000Hz。
9. 外形尺寸和重量:根据提供的信息,外形尺寸为70mm×70mm×32mm,重量≤220g。
10. 电源要求:这是陀螺仪正常工作所需的电源电压和电流范围。
根据提供的信息,电源供电为±5V直流电源供电,电源精度±5%,电源纹波20mV。
11. 输出接口:这是陀螺仪与外部设备连接的接口类型和规格。
根据提供的信息,输出接口为J30-21ZK插座,相应采集线采用J30-21T J。
直接数字量输出,可选RS-422、RS-485、RS-232、脉冲等方式。
以上信息仅供参考,建议咨询相关厂家了解更详细的产品参数信息。
激光陀螺精度
电源:±30 V、±12 V、±5 V、15 V DC
功耗:<25 W
通讯接口:RS422
电气接口:J30J-25ZK
物理指标
重量:<5.9 kg
体积:200 mm×186 mm×123 mm
环境适应性:
工作温度:-40℃~70℃
贮存温度:-55℃~80℃
振动:满足GJB150附录图A 8 W曲线地面车辆上设备振动试验曲线的要求
)
100°/s or 0.0278°/h
(我国发展:如漂移率0.01°~0.02°/h的新型激光陀螺捷联系统在新型战机上试飞,漂移率0.05°/h以下的光纤陀螺、捷联惯导在舰艇、潜艇上的应用,以及小型化挠性捷联惯导在各类导弹制导武器上的应用)
带宽
50
线性度
1
量程
600
角度随机游走
6°/sor 0.00166667°/h
冲击:30 g,11 ms
产品名称:HT-LG-IMU激光陀螺仪
产品简介:
小型数字化IMU,具备精度高、体积小的优点;预留减振器及GPS转换板安装接口。
技术指标
1)陀螺仪指标
零偏稳定性:≤0.01°/h(1σ)
零偏重复性:≤0.003°/h(1σ)
随机游走系数:≤0.003°/√h
标度因数重复性:≤10 ppm
标度因数非线性度:≤10 ppm
2)加速度计指标
零偏稳定性:5×10-5g(1σ)
零偏重复性:5×10-5g(1σ)
ห้องสมุดไป่ตู้陀螺性能指标
测试结果
标度因子
17.8
零漂
(陀螺仪的发展经历了几个阶段。最初的滚珠轴承式陀螺,其漂移速率为(l-2)°/h,通过攻克惯性仪表支撑技术而发展起来的气浮、液浮和磁浮陀螺仪,其精度可以达到0.001°/h,而静电支撑陀螺的精度可优于0.0001°/h。从60年代开始,挠性陀螺的研制工作开始起步,其漂移精度优于0.05°/h量级,最好的水平可以达到0.001°/h。
【精选】光纤陀螺仪指标及其相关定义
光纤陀螺仪指标及其相关定义发表日期:2008-10-24 作者:未知来源:未知1.陀螺输入轴 input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
2. 标度因数非线性度 scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3. 零偏稳定性 bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
4. 零偏重复性 bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。
以多次测试所得零偏的标准偏差表示。
5. 零偏温度灵敏度 bias temperature sensitivity相对于室温零偏值,由温度变化引起光纤陀螺仪零偏变化量与温度变化量之比,一般取最大值表示。
6. 随机游走系数 random walk coefficient表征光纤陀螺仪中角速度输出白噪声大小的一项技术指标,它反映的是光纤陀螺仪输出的角速度积分(角度)随时间积累的不确定性(角度随机误差),因此也可称为角随机游走(ARW)。
7. 频带宽度 bandwidth光纤陀螺仪频率特性测试中,规定在测得的幅频特性中幅值降低3dB所对应的频率范围。
9.输出延迟时间 output delay time光纤陀螺仪信号输出相对于信号输入的延迟时间中与输入频率无关的部分。
10. 启动时间 turn-on time光纤陀螺仪在规定的工作条件下,从加电开始至达到规定性能所需要的时间。
11. 预热时间 warm-up time针对带温控的高精度光纤陀螺仪的一项技术指标,光纤陀螺仪在规定的工作条件下,从加电开始至达到规定性能所需要的时间。
陀螺仪主要性能指标
常见的陀螺仪性能指标与解释零偏零偏,又称为零位漂移或零位偏移或零偏稳定性,也可简称零漂或漂移率,英文中称为drift或bias drift。
零偏应理解为陀螺仪的输出信号围绕其均值的起伏或波动,习惯上用标准差(σ)或均方根(RMS)表示,一般折算为等效输入角速率(°/ h)。
在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的峰-峰值就是零偏值(drift),如图2-6所示。
在整个性能指标集中,零偏是评价陀螺仪性能优劣的最重要指标。
分辨率陀螺仪中的分辨率是用白噪声定义的,如图2-6 中所示,可以用角随机游走来表示,可以简化为一定带宽下测得的零偏稳定性与监测带宽的平方根之比,其单位为((°)ℎ−1)√Hz⁄。
角度随机游走表征了长时间累积的角⁄,或简化为(°)√ℎ度误差。
角随机游动系数反映了陀螺在此处键入公式。
的研制水平,也反映了陀螺可检测的最小角速率能力,并间接反映了与光子、电子的散粒噪声效应所限定的检测极限的距离。
据此可推算出采用现有方案和元器件构成的陀螺是否还有提高性能的潜力。
标度因子标度因子是陀螺仪输出量与输入角速率变化的比值,通常用某一特定的直线斜率表示,该斜率是根据整个正(或负)输入角速率范围内测得的输入/输出数据,通过最小二乘法拟合求出的直线斜率。
对应于正输入和负输入有不同的刻度因子称为刻度因子不对称,其表明输入输出之间的斜率关系在零输入点不连续。
一般用刻度因子稳定性来衡量刻度因子存在的误差特性,它是指陀螺在不同输入角速率情况下能够通过标称刻度因子获得精确输出的能力。
非线性往往与刻度因子相关,是指由实际输入输出关系确定的实际刻度因子与标称刻度因子相比存在的非线性特征,有时还会采用线性度,其指陀螺输入输出曲线与标称直线的偏离程度,通常以满量程输出的百分比表示。
动态范围陀螺在正、反方向能检测到的输入角速率的最大值表示了陀螺的测量范围。
该最大值除以阀值即为陀螺的动态范围,该值越大表示陀螺敏感速率的能力越强。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常见的陀螺仪性能指标与解释
零偏
零偏,又称为零位漂移或零位偏移或零偏稳定性,也可简称零漂或漂移率,英文中称为drift或bias drift。
零偏应理解为陀螺仪的输出信号围绕其均值的起伏或波动,习惯上用标准差(σ)或均方根(RMS)表示,一般折算为等效输入角速率(°/ h)。
在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的峰-峰值就是零偏值(drift),如图2-6所示。
在整个性能指标集中,零偏是评价陀螺仪性能优劣的最重要指标。
分辨率
陀螺仪中的分辨率是用白噪声定义的,如图2-6 中所示,可以用角随机游走来表示,可以简化为一定带宽下测得的零偏稳定性与监测带宽的平方根之比,其单位为((°)ℎ−1)√Hz
⁄。
角度随机游走表征了长时间累积的角⁄,或简化为(°)√ℎ
度误差。
角随机游动系数反映了陀螺在此处键入公式。
的研制水平,也反映了陀螺可检测的最小角速率能力,并间接反映了与光子、电子的散粒噪声效应所限定的检测极限的距离。
据此可推算出采用现有方案和元器件构成的陀螺是否还有提高性能的潜力。
标度因子
标度因子是陀螺仪输出量与输入角速率变化的比值,通常用某一特定的直线斜率表示,该斜率是根据整个正(或负)输入角速率范围内测得的输入/输出数据,通过最小二乘法拟合求出的直线斜率。
对应于正输入和负输入有不同的刻度因子称为刻度因子不对称,其表明输入输出之间的斜率关系在零输入点不连续。
一般用刻度因子稳定性来衡量刻度因子存在的误差特性,它是指陀螺在不同输入角速率情况下能够通过标称刻度因子获得精确输出的能力。
非线性往往与刻度因子相关,是指由实际输入输出关系确定的实际刻度因子与标称刻度因子相比存在的非线性特征,有时还会采用线性度,其指陀螺输入输出曲线与标称直线的偏离程度,通常以满量程输出的百分比表示。
动态范围
陀螺在正、反方向能检测到的输入角速率的最大值表示了陀螺的测量范围。
该最大值除以阀值即为陀螺的动态范围,该值越大表示陀螺敏感速率的能力越强。
带宽
带宽是指陀螺能够精确测量输入角速度的频率范围,这个频段范围越大表明
陀螺的动态响应能力越强。
对于开环模式工作的陀螺,带宽定义为响应相位从0到滞后90度对应的频段,也可等同定义为振幅响应比为0.5 即3dB 点对应的频段。
对于闭环模式工作的陀螺,带宽定义为控制及解调电路的带宽,一般指解调电路中使用的低通滤波器的截至频率。
电路带宽实际上是反映该电路对输入信号的响应速度,带宽越宽,响应速度越快,允许通过的信号频率越高,若频率为某一值的正弦波信号通过电路时其能量被消耗一半,则这个频率便是此电路的带宽。