h桥的4个功率管电路
h型桥式电路原理
h型桥式电路原理
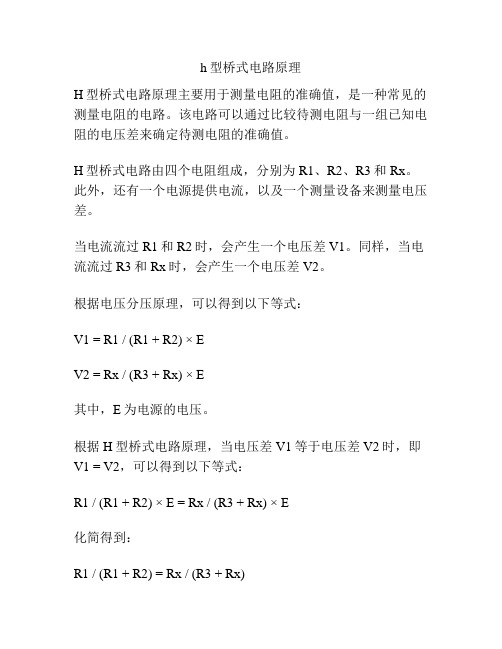
H型桥式电路原理主要用于测量电阻的准确值,是一种常见的测量电阻的电路。
该电路可以通过比较待测电阻与一组已知电阻的电压差来确定待测电阻的准确值。
H型桥式电路由四个电阻组成,分别为R1、R2、R3和Rx。
此外,还有一个电源提供电流,以及一个测量设备来测量电压差。
当电流流过R1和R2时,会产生一个电压差V1。
同样,当电流流过R3和Rx时,会产生一个电压差V2。
根据电压分压原理,可以得到以下等式:
V1 = R1 / (R1 + R2) × E
V2 = Rx / (R3 + Rx) × E
其中,E为电源的电压。
根据H型桥式电路原理,当电压差V1等于电压差V2时,即V1 = V2,可以得到以下等式:
R1 / (R1 + R2) × E = Rx / (R3 + Rx) × E
化简得到:
R1 / (R1 + R2) = Rx / (R3 + Rx)
由此可以解得待测电阻Rx的准确值。
H型桥式电路原理的优点是测量精度高,而且对待测电阻的值没有限制。
不过,使用该电路测量电阻时需要计算和比较,稍显繁琐。
n沟道mos管设计h桥电路
n沟道MOS管设计H桥电路概述本文档将介绍n沟道M OS管设计H桥电路的相关知识和实际应用。
H桥电路是一种常用于电机驱动的电路结构,可以实现正反转和制动功能。
通过灵活地控制四个开关管的导通和截止状态,可以实现精确的电机控制。
在本文中,我们将探讨n沟道MO S管在设计H桥电路中的具体应用和相关技术要点。
1. n沟道M O S管简介n沟道M OS管是一种常见的场效应管,其特点是导电能力强,电流控制性能优秀。
在电机驱动中,n沟道M OS管常常用于控制电机的正反转、速度和制动等功能。
通过合理的设计和选型,n沟道M OS管可以实现高效的电能转换和精确的电机控制。
2. H桥电路概述H桥电路是由四个开关管以及与之配对的半桥驱动电路组成的电路结构。
通过改变四个开关管的导通和截止状态,可以改变电压施加在电机上的方向和大小,从而实现电机控制。
H桥电路主要包括上下半桥和驱动电路两部分,合理的设计和选型能保证电机工作的稳定性和效率。
2.1上下半桥结构H桥电路由两个相对的半桥组成,分别为上半桥和下半桥。
上半桥包括两个开关管,可以通过控制开关管的导通和截止状态来决定电压施加在电机上的方向和大小。
下半桥也包括两个开关管,通过与上半桥相反的导通和截止状态来实现电机的反向驱动。
2.2驱动电路H桥电路中的驱动电路负责控制开关管的导通和截止状态,进而实现电机的正反转、速度和制动等功能。
驱动电路需要提供合适的电压和电流信号,且具备耐压、耐流等特性,以确保稳定可靠的电机运行。
3. n沟道M O S管在H桥电路中的应用n沟道M OS管在H桥电路中起到关键作用,其优点包括低开关损耗、高开关速度、低驱动功率等。
虽然M OS管具有一定的导通电阻和漏电流,但在设计中可以通过合适的选型和辅助电路进行优化。
3.1开关管选型在选择n沟道MO S管时,需要考虑其耐压、导通电阻、开关速度等参数。
合适的选型能够满足电机工作的需求,并提高整体效率。
3.2驱动电路设计驱动电路设计要考虑到n沟道MO S管的特性,为其提供合适的电压和电流信号。
h桥电路的原理及应用介绍
H桥电路的原理及应用介绍一、H桥电路原理H桥电路是一种常见的电子电路结构,因其形状类似于英文字母“H”,故得名为H桥。
H桥电路主要用于控制直流电机或其他电机的方向和速度。
它由四个开关器件(如晶体管或场效应管)组成,形成了一个H形的电路结构。
在H桥电路中,当两个开关器件处于导通状态,而另外两个处于截止状态时,电机就会正向旋转;反之,当另外两个开关器件导通时,电机就会反向旋转。
通过控制这四个开关器件的开关状态,可以控制电机的旋转方向和速度。
二、H桥电路结构典型的H桥电路结构如下图所示:图:H桥电路结构示意图在图中,当Q1和Q4导通,而Q2和Q3截止时,电流从左至右流过电机,使电机正向旋转;反之,当Q1和Q4截止,而Q2和Q3导通时,电流从右至左流过电机,使电机反向旋转。
三、H桥电路工作模式根据开关器件的控制方式,H桥电路有三种工作模式:双极性模式、单极性模式和斩波模式。
双极性模式:在这种模式下,电机在正转和反转时都以全速运行。
这种模式适用于需要高转矩的应用。
单极性模式:在这种模式下,电机只能在一个方向上全速运行,而在反方向上停止。
这种模式适用于需要快速反转的应用。
斩波模式:在这种模式下,电机的平均电压和电流被调节在一定的范围内。
这种模式适用于需要精确控制电机速度的应用。
四、H桥电路驱动方式H桥电路的驱动方式主要有两种:直接驱动和隔离驱动。
直接驱动:在这种方式下,控制信号直接驱动开关器件。
这种方式简单、成本低,但要求控制信号的电流驱动能力较强。
隔离驱动:在这种方式下,使用隔离器件(如光耦合器)将控制信号与开关器件隔离,以避免相互影响。
这种方式适用于高速、大功率应用。
五、H桥电路的应用领域H桥电路广泛应用于各种需要控制直流电机方向和速度的场合,如电动玩具、汽车电子、无人机等。
它还可以用于控制其他类型的负载,如电磁阀、加热器等。
六、H桥电路在电机控制中的应用在电机控制中,H桥电路主要用于直流电机的方向和速度控制。
h桥驱动电路原理
h桥驱动电路原理H桥驱动电路原理H桥驱动电路是一种常用的电路结构,用于控制直流电机的正反转。
它由四个开关元件组成,通常是四个晶体管或四个MOSFET管。
H 桥驱动电路具有很高的灵活性和可靠性,被广泛应用于各种电动设备和机械系统中。
H桥驱动电路的原理是通过控制开关元件的通断状态,改变电机两端的极性,从而实现电机的正反转。
H桥的名称来源于其电路结构形状的形似字母"H"。
H桥驱动电路有四个开关元件,分别为上电子管Q1和Q2,以及下电子管Q3和Q4。
其中Q1和Q4为一对开关元件,Q2和Q3为另一对开关元件。
当Q1和Q4导通,Q2和Q3断开时,电机的正极连接到电源的正极,负极连接到电源的负极,电机正转。
当Q2和Q3导通,Q1和Q4断开时,电机的正极连接到电源的负极,负极连接到电源的正极,电机反转。
当Q1和Q2导通,Q3和Q4断开时,电机短路制动。
当Q1和Q2断开,Q3和Q4导通时,电机自由转动。
为了实现对H桥驱动电路的控制,通常需要一个控制信号。
这个信号可以是一个单片机的输出,也可以是一个硬件电路的触发信号。
控制信号通过控制开关元件的通断状态来实现电机的正反转。
H桥驱动电路的优点是可以实现电机的正反转,并且可以进行制动控制。
此外,它还具有较高的效率和较低的功耗。
然而,H桥驱动电路也存在一些缺点,例如占用空间较大,成本较高,且对于高功率电机的应用会产生较大的热量。
H桥驱动电路是一种常用的电路结构,用于控制直流电机的正反转。
它通过控制开关元件的通断状态,改变电机两端的极性,从而实现电机的正反转。
H桥驱动电路具有很高的灵活性和可靠性,被广泛应用于各种电动设备和机械系统中。
基于eg2104的h桥电路

基于eg2104的h桥电路基于EG2104的H桥电路H桥电路是一种常见的电路结构,由四个开关元件组成,可以用于控制直流电机的正反转。
本文将详细介绍基于EG2104的H桥电路的原理及其应用。
一、H桥电路的原理H桥电路由四个开关元件组成,分别是S1、S2、S3和S4。
其中,S1和S2组成上半桥,S3和S4组成下半桥。
通过控制这四个开关元件的通断状态,可以实现对电机的正反转控制。
1. 正转状态:S1和S4闭合,S2和S3断开,电流从电源的正极流入电机的A相,然后从电机的B相流回电源的负极。
这样,电机就会顺时针旋转。
2. 反转状态:S2和S3闭合,S1和S4断开,电流从电源的正极流入电机的B相,然后从电机的A相流回电源的负极。
这样,电机就会逆时针旋转。
3. 制动状态:S1和S2闭合,S3和S4闭合,电机的A相和B相短路,产生电机制动力矩,使电机停止旋转。
通过控制开关元件的通断状态,可以实现电机的正转、反转和制动,从而实现对电机的控制。
二、EG2104芯片的作用EG2104是一款集成了H桥驱动器的芯片,可以方便地用于控制H 桥电路。
该芯片内部集成了四个MOSFET开关元件,可以直接控制电机的正转、反转和制动。
EG2104芯片具有以下特点:1. 输入电压范围广:可以适应不同电压等级的电机控制。
2. 输出电流大:可以满足大功率电机的驱动需求。
3. 内部保护功能完善:具有过温保护、过流保护、欠压保护等功能,能够确保电路的安全可靠性。
4. 控制信号输入简单:只需要输入两个控制信号,即可实现电机的正转、反转和制动。
三、EG2104芯片的应用基于EG2104的H桥电路广泛应用于各种直流电机的控制领域,如机器人、汽车、船舶等。
下面以机器人为例,介绍EG2104芯片在机器人控制中的应用。
机器人通常需要实现自主移动和定位功能,而电机控制是实现这些功能的关键。
EG2104芯片的高集成度和可靠性使其成为机器人电机控制的理想选择。
步进电机H桥功率驱动电路设计
步进电机H桥功率驱动电路设计步进电机是一种特殊的直流电机,可以通过一定的控制方式实现精准的角度控制。
步进电机的驱动电路通常采用H桥功率驱动电路,其中H桥电路是通过四个开关元件(通常是MOSFET管或者IGBT管)和两个电源组成的,能够实现电机的正、反向旋转。
H桥电路由四个开关元件组成,其中开关S1和S4连接在一起,共同控制电机的一个端口,开关S2和S3连接在一起,共同控制电机的另一个端口。
H桥电路有四种状态:S1和S4为导通状态,S2和S3为截止状态;S2和S3为导通状态,S1和S4为截止状态;S1和S3为导通状态,S2和S4为截止状态;S2和S4为导通状态,S1和S3为截止状态。
步进电机的驱动原理是通过控制H桥电路的四种状态,使得电机在施加电源电压的不同方向上旋转。
控制步进电机的一个重要参数是步距角,即电机每转一圈所走过的角度。
根据步距角的大小,步进电机可以分为全角步进电机和半角步进电机。
全角步进电机的步距角为360度/步数,控制方式可以是单相驱动方式或者双相驱动方式。
单相驱动方式只需要两个驱动电路,一个控制电机的一个端口,另一个端口通过调整S1和S4的导通时间来实现,通过调整导通的时间长短,可以控制电机的速度。
双相驱动方式需要四个驱动电路,分别控制电机的两个端口,通过交替切换四种状态来实现控制。
半角步进电机的步距角为360度/(2×步数)。
控制半角步进电机通常采用四相驱动方式,需要八个驱动电路,通过交替切换八种状态来实现控制。
四相驱动方式的原理是将步进电机的一个端口分成四段,通过施加电源电压的不同顺序,使得电机在不同的相邻段上产生磁场,并完成旋转。
步进电机的驱动电路设计需要考虑以下几个问题:1.驱动电路的工作电压范围,要能适应电机的额定电压以及工作电压波动范围。
2.驱动电路的开关元件的选型,要能够满足电流和功率的要求,并具有足够的开关速度。
3.驱动电路的保护措施,要考虑过流、过热等异常情况的保护。
IR2111和IR2130在PWM直流伺服系统中的应用探讨

IR2111和IR2130在PWM直流伺服系统中的应用探讨收藏此信息打印该信息添加:用户发布来源:未知摘要:介绍了IR2111和IR2130功率MOSFET/IGBT驱动器的特点,分析了以IR2111和IR2130作为功率元件驱动器的PWM直流伺服系统主电路的工作原理。
1 引言功率元件驱动电路的特性在PWM直流伺服系统中占有很重要的地位,在FTCM直流伺系统中,H桥型主电路有四个功率开关器件(功率MOSFET或IGBT),若每个开关器件都用一单独的驱动电路驱动,则需四个驱动电路,至少要配备三个相互独立的直流电源为其供电,这使得系统硬件结构复杂,可靠性下降。
IR2111和IR2130是功率MOSFET和IGBT专用栅极驱动集成电路,独有的HVIC(H 一voltage integrated circuit)技术使得它可用来驱动工作在母线电压高达600V的电路中的功率MOS器件。
采用两片m 2111或一片IR2130。
可完成四个功率元件的驱动任务,其内部采用白举技术,使得功率元件的驱动电路仅需一个输人级直流电源;可实现对功率M OSFET和IGBT的最优驱动,还具有完善的保护功能。
它们的应用可提高系统的集成度和可靠性,并可大大缩小线路板的尺寸。
2 IR2111在PWM直流伺服系统中的应用IR2111是半桥驱动器(Half—Bride Driver),它可同时输出两个驱动逆变桥中高压侧和低压侧的通道信号。
以两片1B2111作为H桥形PWM主电路功率元件驱动器的电路原理图如图1所示。
IR 2111的输入信号IN1和IN2来自伺服系统的控制电路,它们分别送到IR 2111的2脚(IN端);管脚4(LO)、3(COM)和管脚7(HO)、6(V )分别输出低压侧和高压侧MOS器件的驱动信号,其输入输出逻辑关系示意如图2。
逻辑输入信号与CMOS电平兼容,输出栅极驱动电压的范围为10~20V。
开关时间的典型值为ton=850ns。
h桥直流电机驱动电路
h桥直流电机驱动电路H桥直流电机驱动电路是一种常用的电子电路,用于控制直流电机的转动方向和速度。
它由四个开关器件和一个直流电源组成,能够根据输入信号来控制电机的正转、反转以及停止。
本文将详细介绍H桥直流电机驱动电路的工作原理和应用。
我们来了解一下H桥直流电机驱动电路的基本结构。
H桥电路由四个开关器件组成,通常使用晶体管或功率MOSFET作为开关器件。
这四个开关器件分为上桥臂和下桥臂,上桥臂的两个开关器件分别连接于电机的一个端子和电源的正极,下桥臂的两个开关器件分别连接于电机的另一个端子和电源的负极。
通过控制这四个开关器件的通断状态,可以改变电机的电流流向,从而实现电机的正转、反转和停止。
接下来,我们来详细说明H桥直流电机驱动电路的工作原理。
当上桥臂的两个开关器件都关闭时,上桥臂与电机形成闭环,电流从电源正极流向电机,电机正转;当上桥臂的两个开关器件都打开时,上桥臂与电机断开,电机停止转动。
同样地,当下桥臂的两个开关器件都关闭时,下桥臂与电机形成闭环,电流从电机流向电源负极,电机反转;当下桥臂的两个开关器件都打开时,下桥臂与电机断开,电机停止转动。
通过这种方式,可以实现电机的正转、反转和停止。
H桥直流电机驱动电路的控制信号通常由微控制器或其他数字电路产生。
控制信号的频率通常在几十kHz到几百kHz之间,可以通过PWM(脉宽调制)技术来实现。
PWM技术通过改变开关器件的通断时间比例来控制电机的转速。
通断时间比例越大,电机的平均电流越大,转速越快;通断时间比例越小,电机的平均电流越小,转速越慢。
通过调整PWM的占空比,可以实现电机的速度调节。
H桥直流电机驱动电路不仅可以控制电机的转向和转速,还可以实现动态制动和能量回收。
动态制动是指通过改变电机的工作状态,将电机的转动能量转化为电能,并回馈到电源中,实现能量的回收和再利用。
这种制动方式可以提高系统的能量利用效率,降低能耗。
另外,H桥直流电机驱动电路还可以实现电机的电磁刹车,即通过改变电机回路的状态,使电机产生反电动势,从而使电机停止转动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
h桥的4个功率管电路
H桥的4个功率管电路
H桥是一种常用的电路拓扑结构,由4个功率管组成,用于控制电流的方向和大小。
它在电力电子领域中广泛应用于直流电机驱动、逆变器和电源等系统中。
本文将详细介绍H桥的4个功率管电路及其工作原理。
一、H桥电路结构
H桥电路由4个功率管组成,分为上下两个半桥。
每个半桥包含两个功率管,分别称为高侧管和低侧管。
高侧管连接电源正极,低侧管连接电源负极。
通过控制高侧管和低侧管的导通与截止,可以实现电流的正向和反向流动。
二、工作原理
1. 正向导通状态:当高侧管导通,低侧管截止时,电流从电源正极经过高侧管流向负载,形成正向电流通路。
同时,负载的另一端通过低侧管与电源负极相连,形成回路。
2. 反向导通状态:当低侧管导通,高侧管截止时,电流从电源负极经过低侧管流向负载,形成反向电流通路。
同时,负载的另一端通过高侧管与电源正极相连,形成回路。
通过控制高侧管和低侧管的导通与截止,可以实现电流的正向和反向流动,从而控制负载的运行状态。
三、H桥的应用
H桥电路广泛应用于各种电力电子系统中,以下是几个常见的应用领域:
1. 直流电机驱动:H桥电路可以控制直流电机的转向和转速。
通过改变高侧管和低侧管的导通状态,可以实现正转、反转和制动等功能。
2. 逆变器:H桥电路可以将直流电源转换为交流电源。
通过控制高侧管和低侧管的导通与截止,可以实现交流电压的正向和反向输出。
3. 电源系统:H桥电路可以用于构建高效率的电源系统。
通过控制高侧管和低侧管的导通与截止,可以实现电源的开关控制和电压调节。
四、总结
H桥的4个功率管电路是一种常用的电力电子拓扑结构,通过控制功率管的导通与截止,可以实现电流的正向和反向流动。
它在直流电机驱动、逆变器和电源等系统中具有重要的应用价值。
通过深入理解H桥电路的结构和工作原理,我们可以更好地应用它来满足不
同系统的需求。