第三章2雷达图像特征
侧视雷达图像的几何特征
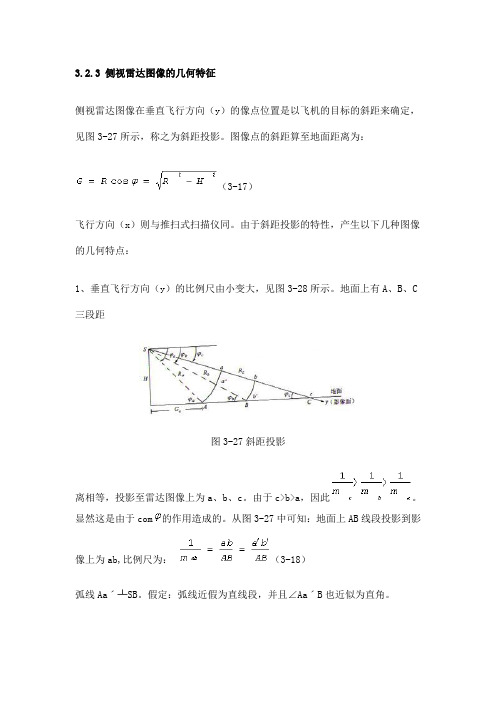
3.2.3 侧视雷达图像的几何特征侧视雷达图像在垂直飞行方向(y)的像点位置是以飞机的目标的斜距来确定,见图3-27所示,称之为斜距投影。
图像点的斜距算至地面距离为:(3-17)飞行方向(x)则与推扫式扫描仪同。
由于斜距投影的特性,产生以下几种图像的几何特点:1、垂直飞行方向(y)的比例尺由小变大,见图3-28所示。
地面上有A、B、C 三段距图3-27斜距投影离相等,投影至雷达图像上为a、b、c。
由于c>b>a,因此。
显然这是由于com的作用造成的。
从图3-27中可知:地面上AB线段投影到影像上为ab,比例尺为:(3-18)弧线Aaˊ┴SB。
假定:弧线近假为直线段,并且∠AaˊB也近似为直角。
则变成通式(3-19)考虑到实测的斜距是按比例尺缩小为影像,因此在侧视方向上的比例尺为:(3-20)可见,°,cos,即趋于0°时比例尺大,而°,cos,即趋于90°时比例尺小。
2、山体前倾,朝向传感器的山坡影像被压缩,而背向传感器的山坡被拉长,与中心投影相反,还会出现不同地物点重影现象。
如图3-29所示,地物点AC之间的山坡在雷达图3-28 侧视雷达影像的比例尺图像上被压缩,在中心投影像片上是拉伸,CD之间的山坡出现的现象正好相反。
地物点A和B在雷达图像上出现重影,在中心投影像片中不会出现这种现象。
图3-29重影现象3、高差产生的投影差亦与中心投影影像投影差位移的方向相反,位移量也不同。
见图3-30所示。
投影差(3-21)而(3-22)图3-30投影差由于所以取(3-23)当△h>0时,也大于0为正值,反之为负值。
投影差改正时用加法:。
雷达成像原理
Microwave radar imaging and advanced concepts雷达成像原理第一章雷达基础知识 (5)1.1雷达的定义 (5)1.2雷达简史 (5)1.3电磁波 (6)1.4脉冲 (9)1.5分贝值表示方法 (9)1.6天线 (10)1 .7雷达散射截面 (12)2.1傅立叶变换 (14)2.2雷达硬件组成 (15)2.2.1振荡器 (15)2.2.2波形产生 (16)2.2.3混频器 (16)2.2.4调制 (16)2.2.5发射机 (16)2.2.6波导 (17)2.2.7双工器 (17)2.2.8天线 (17)2.2.9限幅器 (18)2.2.10低噪放大器 (18)2.2.11系统噪声 (18)2.2.12解调 (19)2.2.13正交混频 (20)2.2.14 A/D转换器 (21)2.3天线 (23)2.3.1天线的概述 (23)2.3.2方向性函数 (24)2.3.3天线增益 (27)2.3.4天线口面上辐射场的渐变处理 (28)2.3.5余割平方天线 (29)2.4相控阵天线 (30)2.4.1一维线阵列天线 (31)2.4.2二维相控阵 (33)第三章外部环境对雷达系统的干扰 (34)3.1雷达散射截面(RCS) (34)3.1.1简单目标的RCS (35)3.1.1.1理想导体球 (35)3.1.1.2平板 (36)3.1.1.3角反射器 (36)3.1.1.4 Luneburg透镜 (37)3.1.2 复杂目标的RCS (38)3.1.3计算RCS的方法 (38)3.1.4极化因素 (38)3.1.4.1 极化散射矩阵 (39)3.1.4.2简单目标的极化散射矩阵 (39)3.1.4.3 更一般的极化基 (40)3.2 传播与杂波 (41)3.2.1 雷达波在大气中的折射 (42)3.2.2 地表弯曲效应 (42)3.2.3雷达波在空气中的衰减 (43)3.2.4雷达波在雨水中的衰减 (43)3.2.5雷达波在地表的反射 (44)3.2.6 多路效应 (44)3.2.7 表面杂波反射 (45)3.2.8 降水引起的雷达反向散射 (46)3.3 外部噪音 (47)第四章:基本雷达信号处理 (50)4.1 从噪声和杂波中间测回波信号 (50)4.1.1检测器特点 (50)4.1.2检测的基本理论 (50)4.1.3噪声中检测无波动目标 (52)4.1.3.1:已知相位的单脉冲的相参检测 (52)4.1.3.2单脉冲包络检测 (52)4.1.3.3 n个脉冲的相参积分: (53)4.1.3.4 n个非相参脉冲的积分变换损失: (53)4.1.4 施威林情形 (53)4.1.4.2 波动损失 (54)4.1.5:噪声中目标检测小结: (54)4.1.6:次积分:无振动目标 (54)4.1.7目标 (55)4.2 雷达波形 (55)4.2.1总的雷达信号 (55)4.2.2 匹配滤波器 (56)4.2.3:匹配滤波器对于延迟,多谱勒平移、信号的响应, (58)4.2.4 雷达模糊函数 (59)4.2.5 例1:一个单脉冲;距离和速度分辨率 (60)4.2.6 例2:线性频率调制脉冲;脉冲压缩 (61)4.2.7 例3:相关脉冲序列:在距离和速度上的分辨率和模糊度 (62)4.2.7.1 单脉冲串 (63)4.2.7.2 线性调频脉冲串 (64)4.2.7.3其它脉冲序列 (65)4.2.8 相差处理间隔 (66)4.2.9 CPI的例子,求解雷达方程 (66)4.3 雷达测量精确度 (67)4.3.1单脉冲 (67)4.3.2 卡尔曼绕界限 (67)4.3.2.1在频率上得卡尔曼-绕界限 (68)4.3.2.2延迟上的卡尔曼绕界限 (69)4.3.2.3角度上的卡尔曼--绕界限 (69)4.3.2.4卡尔曼-绕界限的例子。
第三章 遥感成像原理与图像特性2

遥感原理与应用
(三)像点位移
在中心投影的像片上,地 形的起伏除引起像片比例尺变 化外,还会引起平面上的点位 在像片上的位置移动,这种现 象称为像点位移。
H
S
f
n r a0
h
a
H-h
像 点
rh h H Rh h H h
R
A 地面点
h h
N
A0
A′
School of Resource and Environment Engineering, Wuhan Technology of University
School of Resource and Environment Engineering, Wuhan Technology of University
遥感原理与应用
5、 海洋卫星系列的应用
(现阶段海洋卫星所获得的资料大多未公开) 1、 海面温度和水色的研究:(温度精确达1度,水色主要 取决于营养值。水色与鱼群活动密切相关(黄质浓度)浮 游生物,沉积物含量,污染物,水藻)。 2 、海洋形态及大地水准面的测量。 3、洋流、寻找锋面渔场、航海等提供可靠信息。
1 f m H 0 h2
H0
h1
h2 School of Resource and Environment Engineering, Wuhan Technology of University
遥感原理与应用
重叠和遗漏视象示意图
x1 f x2 x3 x4
H 地形 Δh 重叠部分
起始面
School of Resource and Environment Engineering, Wuhan Technology of University
【精品】第三章-遥感成像原理与遥感图像特征..幻灯片
• 固体自扫描中: 用一竖列的10个探测元件同时扫,每个元件只扫51条线,则 在瞬时视场的停留时间为2μs。 若用一竖列的512个探测元件同时扫,只要一次自扫描即可, 像刷子刷过一样。此时,CCD探测元件与地面上的像元(瞬时 视场)相对应,靠遥感平台前进运动就可直接以刷式扫描成像。
(2)线对数(line pairs)
对于摄影系统而言,影像最小单元常通过1mm间隔内包 含的线对数确定,单位为线对/mm。所谓线对指一对同等大 小的明暗条纹或规则间隔的明暗条对。
一、遥感图像特征
(3)瞬时视场(IFOV)
指遥感器内单个探测元件的受光角度或观测视野。单位为
毫弧度(mrad)。
S
S ➢IFOV越小,最小可分辨单元越小,空间分辨率越高。 f f ➢IFOV取决于遥感器光学系统和探测器的大小。
4 5
0.7~0.8μm
0.8~1.1μm
卫
星
10.4~12.6μm 前 进
方
向
6
成像板
一、遥感图像特征
一般来说:遥感系统的空间分辨率越高,其识别 物体的能力越强。但实际上每一目标在图像上的可 分辨程度,不完全决定于空间分辨率的具体值,而 是和它的形状、大小,以及它与周围物体亮度、结 构的相对差有关(反差)。例如MSS的空间分辨率 为79m,但是宽仅10-20m的铁路,公路,当它们通 过沙漠、水域、草原等背景光谱较单调或与道路光 谱差异大的地区,往往清晰可辨。
成像方式遥感器 扫描成像类型(光电成像类型) 微波成像类型(雷达成像类型)
二、 遥感传感器
⑴ 摄影成像类型
① 摄影成像原理:通过成像设备获取物体影像的技术。 ② 分类
第三章 SAR基本原理

Fp(%) 0.0 1.5 6.0 13.4 23.4 35.7 50.0 65.8 82.6 100.0
雷达图像的透视收缩,实际上是电磁波能量集中的表现,前坡的收缩比后坡严 重,所以前坡的图像要比后坡“亮”,当整个坡度收缩成一点,图像最“亮”。
顶底位移(Layover)
• 顶底位移是透视收缩的一种极端情况,它发生在入射角小于局部地形 倾斜角时。
• In imagery, radar shadows occur in the down-range direction behind tall objects. They are a good indicator of radar illumination direction if annotation is missing or incomplete.
阴影(shadow)
• Radar shadows in imagery indicate those areas on the ground surface not illuminated by the radar. Since no return signal is received, radar shadows appear very dark in tone on the imagery.
2007,12
Radarsat-2,
C Qud Pol
10
工作频段的选择
• Application factors: – Radar wavelength should be matched to the size of the surface features that
we wish to discriminate • – e.g. Ice discrimination, small features, use X-band • – e.g. Geology mapping, large features, use L-band • – e.g. Foliage penetration, better at low frequencies,use P-band In general, C-band is a good compromise • System factors: – Low frequencies: • More difficult processing • Need larger antennas and feeds • Simpler electronics – High frequencies: • Need more power • More difficult electronics • Good component availability at X-band Note that many research SARs have multiple frequency bands
03-3第三章-雷达在智能网联汽车中的应用

• 机械激光雷达只能以恒定的速度旋转,不能进行 如此精细的操作。
• 固态激光雷达通常分为相控阵、Flash和MEMS三 种类型
激光雷达的功用
• (1)相控阵固态激光雷达
• 固态激光雷达采用相控阵原理实现,完全消除了机械 结构,通过调整发射阵中各发射单元的相位差来改变 激光的出射角。光学相控阵通常由其相位的电子束扫 描控制,因此也被称为电子扫描技术。
激光雷达的功用
• (3)MEMS固态激光雷达
• MEMS固态激光雷达是指将所有机械部件集成到一个 芯片中,通过半导体工艺生产的MEMS。它消除了机 械旋转结构,从根本上降低了激光雷达的成本。
激光雷达的功用
• 固态激光雷达可以探测150米的距离。响应速度快, 控制电压低,扫描角度大,价格低。
• 根据线束数量,固态激光雷达可分为单线激光雷达和 多线激光雷达。顾名思义,单行激光雷达扫描一次只 能产生一条扫描线,得到的数据是二维数据,因此无 法区分目标物体的三维信息。
信号处理 模数转换
激光器
光束控制
探测器 制冷
主处理器
发射光学 天线
接收光学 天线
距离信息
速度信息
角度信息
目标图像信息
目标物体
伺服系统 通信系统 屏幕系统
激光雷达的功用
• 请说说汽车激光雷达的三维立体图像是怎么形成的?
激光雷达的功用
• 实时激光雷达一般分为16线、32线和64线,雷达测 距的精度非常重要,以16线激光雷达为例,它具有2° 角分辨率,如果行人在50米以外,只有一条激光脉冲 线。显然不能区分行人的轮廓。它也可以在白天利用 摄像头进行分辨。但如果是在夜间,激光雷达难以单 独识别,毫米波雷达只能识别障碍物,对热敏信息无 法识别。
规则大证雷达辅导讲义

H:水平波束宽度;d:光点角尺寸
(二)雷达方位分辨力:
H
The bearing angle of same
H
target but different range 方位分辨力
1、影响方位分辨力的设备因素
①水平波束宽度②屏幕像素③使用量程
2、影响方位分辨力的气象海况因素 光栅扫描雷达较严重,横向回波闪烁误差通常在1~
的理论最小探测距离与安装最小观测距离中的较大者。
按照最新性能标准,2008年7月1日之后安装的雷达,在晴好天气,天线 高于水面15 m且本船静止时,雷达在不做任何其他调整仅改变量程时,能够
在40 m~1 n mile的水平距离中连续观测到表5-1-1中所列的典型导航浮标。
二、雷达目标分辨能力
(一)雷达距离分辨力
雷达分辨相同方位相邻两个点目标的能力,称为距离分辨力。
1.影响距离分辨力的设备因素
①脉冲宽度 ②屏幕像素 ③接收系统通频带失真
距离分辨力
像信目 脉 信 目
显
素号标 冲 号 标
示
失处 A 宽 处 B
边
真理
度理
缘
失
失
真
真
图 5-1-3 距离分辨力
2.影响距离分辨力的气象海况因素
恶劣气象海况造成目标与本船之间的相对运动、涌 浪颠簸 ,使得回波在屏幕上显示的位置和回波强度不稳 定的现象(回波闪烁 ),引起目标前后沿位置模糊 。
一、雷达目标探测范围
(一)目标最大探测距离
目标最大探测距离是指在雷达显示器上能够辨识该目
标的最远距离,表征着雷达发现远距离目标的能力。
取决于:
1)目标雷达探测地平
雷达第三章讲解

空气密度和湿度
– Rain rate
降雨率
– Fog/cloud water content
雾/云的含水量
– Index of refraction
折射率
• Earth’s surface – Surface material (water vs land) – Surface roughness (waves, mountains) – Earth’s curvature
地表 表面物质(水与土地) 表面粗糙度(水波,山)
地球曲率
Atmospheric Attenuation at Sea Level 海平面的大气衰减
Radar power absorbed by water vapor and oxygen 水蒸气和氧气吸收雷达能量
Attenuation is a loss of power characterized by L in radar range equation 雷达距离方程中L代表功率 的衰减
• Atmospheric refraction 大气折射
Interference Basics 干扰的基础
• Two waves can interfere constructively or destructively 两个波可以建设性或破坏性的干扰
• Resulting field strength depends only on relative amplitude 产生的磁场强度只取决于相对振
超折射
的影响
管道 4 / 3地球半径
管道对目标检测的影响
表面无管
发现目标 没有看到目标
表面有 管
管道延伸低空探测范围,但可以 引起在雷达覆盖面的意想不到的孔
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斜距分辨率Pd
pd
c
2
为雷达脉冲宽度
地距分辨率Pg c pg 2 cos
制作:王瑞雪 2010-5-20
侧视雷达成像特点 侧视成像 透视能力 多种极化方式 多波段 比例尺在横向发生畸变 地形起伏引起位移
制作:王瑞雪 2010-5-20
侧视雷达穿透深度示意图
缩短效应,透视收缩
即雷达图像上所有前坡(面向传感器一侧)长度缩短, 而后坡长度伸长。在像平面上前坡比它自身表现得 更短、更陡、更亮;后坡比它自身表现得更长、更 缓、更暗。
由于雷达按时间序列记录回波信号,因而入射角与 地面坡度角的不同组合,使其出现程度不同的前视 收缩现象。
制作:王瑞雪 2010-5-20
制作:王瑞雪 2010-5-20
a SSM/I-derived map of polar ice in the Arctic, with the left panel showing winter distribution and the right depicting summer ice.
Pa R Fra bibliotekPa
D
D
R
制作:王瑞雪 2010-5-20
D 雷达天线孔径 R 距目标地物的距离
了解
Pa
D
R
合成孔径侧视雷达方位分辨率
Pa
D 雷达天线孔径
D 2
制作:王瑞雪 2010-5-20
了解
P32图3-23
pd
不变,
pg
随俯角不同而变化
四栋楼房A、B、C、D, 距离AB=CD, 哪两栋楼房 能够区分开?
(7) 在雷达影像上,线状地物一般比较清晰
(8) 雷达影像的立体感较强
制作:王瑞雪 2010-5-20
回波的强弱主要影响因素
地物表面的粗糙度 极化方式 地物的物理电学特性
制作:王瑞雪 2010-5-20
制作:王瑞雪 2010-5-20
地形起伏引 起位移
缩短效应 (foreshort enting)
延伸效应 (layover)
制作:王瑞雪 2010-5-20
☆
雷达遥感的信息特征
(1) 雷达影像的色调差异主要取决于回波的强弱 (2) 一般来说,距离近的物体回波强,距离远的物体回波较弱 (3) 金属物体往往都有较强的回波 (4) 平行于航向的物体回波较强 (5) 受地形起伏的影响,雷达波不能到达之处,形成雷达阴影 (6) 受天线角度影响,地面镜面目标无回波
制作:王瑞雪 2010-5-20
a C-band airborne SAR image of an experimental station at Maricopa, AZ near Phoenix
The darker fields are those with both higher moisture and growing crops which, in this case, produce less returns to the SAR receiver.
☆ 二、主动微波遥感
----侧视雷达、合成孔径雷达
制作:王瑞雪 2010-5-20
制作:王瑞雪 2010-5-20
地面分辨率参数
方位向分辨率Pa 距离向分辨率
斜距分辨率Pd 地距分辨率Pg
类似于行距和列距
制作:王瑞雪 2010-5-20
Pa R
真实孔径雷达的方位分辨率
制作:王瑞雪 2010-5-20
多种极化方式
水平极化——H 垂直极化——V HH HV VV HH
制作:王瑞雪 2010-5-20
电场向量与地面平行 电场向量与地面垂直
多波段、多极化雷达影象
中国昆仑山地区雷达影象
制作:王瑞雪 2010-5-20
斜距图像的比例失真(scale distortion)
近距离压缩
雷达的侧视带状成像,沿距离向用斜距显示,同样 地物在近端和远端的斜距不同,因此, 越靠近近端,等长度的目标被压缩的越多 在斜距图像上各目标点间的相对距离与目标间的地 面实际距离并不保持恒定的比例关系,图像产生不 均匀畸变
制作:王瑞雪 2010-5-20
前视收缩(fore shortening—scale distortion)
This image shows the variation of such temperatures (in degrees Kelvin) over land in the southern US and the waters of the Gulf of Mexico.
制作:王瑞雪 2010-5-20
制作:王瑞雪 2010-5-20
第三章 遥感成像原理与图像特征
第二节 微波遥感图像特征
制作:王瑞雪 2010-5-20
制作:王瑞雪 2010-5-20
一、被动微波遥感
20 世纪70 年代末以来, Nimbus 卫星系列和 美国国防气象卫星计划(DMSP) 上开始搭载 一系列被动微波传感器升空 detecting soil moisture and temperature near-surface bedrock geology Assessing snow melt conditions Tracking sea ice distribution assessing sea surface temperature
叠掩现象(Layover—relief displacement)
延伸效应
因地势起伏,地理位置远但地势高的地物产生的回波可能会 早于地理位置近但是地势低洼的地物产生的回波,因此, 当雷达接收到物体上部回波先于下部回波时,在成像处理时 物体的上部得以显示,产生目标倒置的视觉效果,称为叠掩。 一般情况下,叠掩出现在小入射角的时候,在星载雷达图像 上较为普遍。