第五章雷达图像特性及其判读特点
第五章多普勒速度型的辨认

第五章多普勒速度图基本识别在本章中你将学会:(1)识别径向速度特征的基本原则;(2)速度显示与垂直风廓线之间的关系;(3)如何用这些基本原则解释雷达速度产品。
在解释速度产品时,你必须牢记以下两点:(1)雷达显示的只是沿雷达径向的速度;(2)不正确地退模糊的速度和距离折叠会使速度产品的解释变得困难。
在学完本章后,你应该掌握下列知识:1.在均匀、不均匀、模糊(ambiguous)和复杂的气象条件下解释多普勒速度型。
包括如下几点:a.入流与出流(inbound and outbound flow);b.与速度值对应的色彩;c.定常风向风速下的速度识别;d.风向风速随高度变化条件下的速度识别;e.速度最大值的识别;f.汇合(confluence )与发散(diffluence)流型的识别;g.垂直不连续风场的识别;h.边界(boundary 这里指密度不连续面,如锋面等)的识别;i.辐合与辐散流型的识别;j.气旋式和反气旋式旋转流型的识别;k.上面两种流型的任何组合流型的识别。
2. 从均匀和不均匀的水平流型推断垂直风廓线。
3. 利用识别的速度流型估计相应的气象条件。
5.1 识别多普勒速度图的基本知识5.1.1 多普勒速度图象的PPI 显示方式新一代天气雷达是在一系列固定仰角上扫描360︒进行采样的,即在某一个仰角,雷达天线绕垂直轴Z 进行360︒扫描(即PPI 方式扫描),所采集到的是圆锥面上的资料(图5-1)。
在每个仰角上,以雷达为中心,沿着雷达波束向外,径向距离的增加同时也表示距地面的高度增大。
雷达所探测到的任一目标的空间位置(x,y,h) 可根据仰角φ、方位角θ、目标距雷达的倾斜距离r求得,其中测定目标高度h 的公式为:h = h0 + rsinφ+ r2 /(2R m′)式中h0 为雷达天线架设高度,r 为目标的斜距,R m′为等效地球半径。
在标准大气折射情况下,R m′为真实地球半径R 的4/3 倍,约8500 公里。
雷达回波识别与分析

非气象回波(5)
天线辐射特性引起的虚假回波
产生原因:天线有主瓣、旁瓣、尾瓣,且存在着一定的宽度,虽然旁 瓣、尾瓣的能量分布非常小,但当旁瓣或尾瓣发射的电磁波在近距离 遇到一些特别强的降水回波中心时,反射或散射回来的电磁波也可能 被接收机接受到,从而产生虚假的回波。
主要特征
PPI回波特征:在比较大的范围内,回波边缘支离破碎,没有明显的边 界,回波中夹杂有一个个结实的团块,似一团团棉花絮,强度 >=40dBz,有时强回波带可形成一条短带;
RHI回波特征:柱状回波高低起伏,高峰部分可达雷阵雨高度,一般 只有连续性降水所具有的回波高度,有时还共存对流云阵性降水回波 特征(柱状回波)和层状云连续降水回波特征(零度层亮带,当然亮 带并不均匀);
对流云阵性降水——块状回波(2)
RHI特征
回波单体呈柱状,一些强烈发展的单体,回波顶高呈现为 砧状或花菜状,或纺锤状,回波顶高多数在6-7Km(因地 区和季节而不同,甚至对流层顶);
无零度层亮带,回波涨落明显;
径向速度场特征
由于降水回波单体块状分布,水平尺度小,因而径向速度 场范围分布的也很小,等值线分布密集,切向梯度也比较 大,有些比较小的单体中一般仅为正负中心;
在RHI上呈柱状,地步不及地,发展迅速,若条件 许可,能在很短时间内由云发展成为阵雨或雷雨;
雾的回波
雾滴和云滴一样,粒子非常小,只有波长较短、 灵敏度较高的雷达才能探测到;
在PPI上,雾的回波呈均匀弥散状,像一层薄 纱罩在屏幕上;
在RHI上,雾的回波高度很低,顶高只有1Km 左右;
谢谢!
可以分析锋面和切变线的位置,因为锋面存在时正负中 心通常关于向径对称
05导航雷达第五章雷达观测
3.操作技术因素
为了提高所使用雷达的距离分辨力,应注意:
1)尽量使用小量程,使用窄脉冲发射,
2)将雷达调整在最佳工作状态, 3)并适当减小增益和屏幕亮度,不使用回波扩展。 4)适当使用FTC,可以显著提高距离分辨力。
4.结论和IMO性能标准(距离分辨力)
IMO最新雷达性能标准规定,在平静的海面使用1.5 n mile 或更小的量程,在量程的50%~100%范围内,两个点目标的 距离分辨力应不低于40 m(此前的标准为50 m)。
2、若在8.8n mile之外,其岸线前沿在雷达探测地平之下,雷 达不能探测到岛屿的前沿,只能通过测量目标的后沿定位。
2.目标雷达最大作用距离
在自由空间中,雷达能够探测到目标的最远距离称为目标的 雷达最大作用距离。
Rmax 2 = 4
2 2 PG 0 64 3 Pr min
式中, PT ——雷达峰值功率(W) GA ——天线增益 ——工作波长(m) Prmin ——接收系统门限功率(W) 0 ——目标的有效散射面积(m2)
1.目标雷达探测地平 R max = 2.2( hA + h T ) (n mile)
hA为雷达天线高度,hT为目标高度。
2.2 hA
称为海面雷达地平;
对于海拔为0的岸线,必须距其小于该距离才能被发现。 例如,假设雷达天线高度为hA =16 m,则海面雷达地平约为 8.8n mile。如果利用海中小岛定位, 1、当岛屿在8.8 n mile之内时,其岸线前沿在雷达探测地平 之上,可以测量目标的前沿定位;
按照最新性能标准,2008年7月1日之后安装的雷达,在晴好天气,天线 高于水面15 m且本船静止时,雷达在不做任何其他调整仅改变量程时,能够 在40 m~1 n mile的水平距离中连续观测到表陡山,河口宽度为300米, 雷达天线水平波束宽度为1度,本船离河口_海里以 外时,雷达荧光屏上河口将被两侧陡山回波堵满。 A.7.5 B.9.3 C. 10.4 D.6
5第五章雷达回波的识别技术

风向随高度先顺转后逆转
(三)风速风向都随高度变化的各种图象
当风速和风向都随高度变化时,可以得到许多不同的多普勒速度 图象。由于地面上风速为零,因此只有零值带穿过图象的中心。 图象边缘的多普勒速度出现了混淆,这是因为在那些高度上的风 速超出了50海里/小时的奈科斯特间隔(这是下一代天气雷达采用 的一种间隔)。从速度间隔一端到另一端色彩上的突变很清楚得 显示了速度混淆效应。
一、回波强度分析技术
由雷达反射率因子Z值大小即可判别回波强弱.
瑞利散射
另外,回波形态特征、回波特殊结构和形态、 回波移动特点可知回波强度
二、脉冲多普勒天气雷达径向速度场分析技术与方法
对多普勒径向速度场基本特征的研究,可按
•零径向速度线; •朝向雷达分量(负)、离开雷达分量(正)范围、分布及中心; •强多普勒径向速度梯度带
Single Doppler Interpretation
• Things to remember:
The Zero Isodop “Problem”
当径向垂直于风速时, 雷达
显示零速 - This “zero
zone” is called the
0%
“Zero Isodop”.
100%
当径向平行于风速时, 雷达显示最大风速
一、几种典型流场的PPI多普勒径向速度模式
雷达作低仰角探测:
取径向速度Vr(r)为常数c:
天线
风向
方位
(一)风向不变,风速随高度变化的各种图象
风向若在所有高度上保持一致,那么其多普勒速度图象中就总有一条直
的零值带,图象的其他部分就反映了风速的垂直廓线。 风速若不随高度变化,是个非零常数,那么多普勒速度的极值便由
雷达知识科普:成像雷达与分辨率

雷达知识科普:成像雷达与分辨率高分辨成像雷达已成为遥感和军事监视的重要工具。
与低分辨率相比,高分辨率成像可以分辨出更精细的细节,这一点可以非常有效地加以利用。
中等分辨率的雷达传感器只允许探测物体,如飞机,并估计位置和相对速度。
随着沿航迹分辨率(在飞机轨迹方向上)和跨航迹分辨率(垂直于飞机轨迹)的提高,越来越多的物体部分被分开分辨,从而显示出更高水平的细节。
事实上,非常精细的分辨率可以识别或分类一个物体。
本章定义了雷达图像分辨率,并介绍了实现沿航迹高分辨率的方法。
这些组合在一起可以产生高分辨率的2D图像。
如果雷达系统的分辨率比物体的尺寸要小得多,那么它就可以用来制作物体及其结构的散射图或“雷达图像”。
由于雷达发射机的相位相干特性,图像由具有幅值和相位的复数值组成。
一般情况下,图像形成后,将相位值丢弃,并将其大小以灰度图像的形式显示。
这类似于光学照片,尽管有重要的区别,如频率和照明方向。
然而,在雷达图像中,如果分辨率足够高,就可以推断出物体的大小、形状和方向以及更详细的特征。
生成雷达图像的方法与光学相机中使用的方法有很大的不同。
雷达图像的精细分辨率是通过交叉(距离)的精细分辨率(通过宽带雷达传输实现)和通过孔径合成的沿轨迹精细分辨率的结合来实现的。
正如我们所看到的,合成孔径雷达(SAR)已经成为民用和军用遥感领域不可缺少的工具。
1. 如何定义分辨率雷达传感器产生的图像质量主要由分辨距离较近的物体的能力来衡量。
这种能力可以用分辨率差和单元大小来定义。
分辨距离是指在雷达图像中,两个回波面积相等的散射体可被分开并仍可被识别为独立散射体的最小距离。
散射体可能是单个物体,如两架独立的飞机,也可能是单个物体的组成部分,如单个飞机的机头、驾驶舱、发动机、机翼和尾部。
散射体的这种分离通常用跨航迹分量Dr和方位角或沿航迹分量Da (与雷达径向视线成直角的分量)来表示。
1分辨率单元格是一个矩形,其边Dr和Da定义了单元格的大小(图1)。
典型地质现象与雷达图像特征
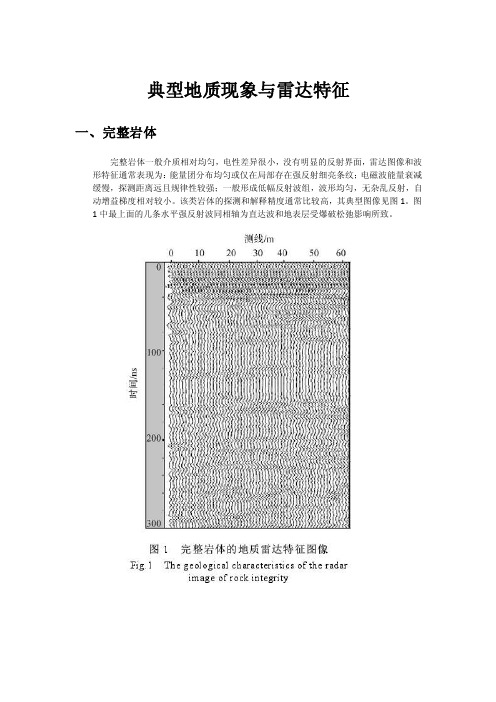
典型地质现象与雷达特征一、完整岩体完整岩体一般介质相对均匀,电性差异很小,没有明显的反射界面,雷达图像和波形特征通常表现为:能量团分布均匀或仅在局部存在强反射细亮条纹;电磁波能量衰减缓慢,探测距离远且规律性较强;一般形成低幅反射波组,波形均匀,无杂乱反射,自动增益梯度相对较小。
该类岩体的探测和解释精度通常比较高,其典型图像见图1。
图1中最上面的几条水平强反射波同相轴为直达波和地表层受爆破松弛影响所致。
二、断层破碎带和裂隙带断层是一种破坏性地质构造,其内通常发育有破碎岩体、泥或地下水等,介质极不均匀,电性差异大,且断层两侧的岩体常有节理和褶皱发育,介质均一性差。
而裂隙带通常存在于断层影响带、岩脉以及软弱夹层内,裂隙内也有各种不同的非均匀充填物,介电差异大。
他们一般都有明显的反射界面,这就为地质雷达创造了良好的应用条件。
在断层或裂隙带,其地质雷达图像和波形特征较为相似,通常表现为断层和裂隙界面反射强烈,反射面附近振幅显著增强且变化大;能量团分布不均匀,破碎带和裂隙带内常产生绕射、散射,波形杂乱,同相轴错断,在深部甚至模糊不清;电磁波能量衰减快且规律性差,特别是高频部分衰减较快,自动增益梯度较大;一般反射波同相轴的连线为破碎带或裂隙带的位置。
其典型地质雷达特征图像如图2和图3所示。
虽然两者的雷达特征图像相似,但通过对比分析可大致把它们分辨开来:a.断层破碎带的影响范围通常比裂隙带宽,在地质雷达图像上有较宽的异常反应。
相反的,裂隙带异常在雷达图像上一般表现为相对较窄的条带。
b.断层破碎带的波幅变化范围通常比裂隙带大,而裂隙带的振幅一般为高幅。
c.在相对干燥情况下,断层破碎带在地质雷达图像上同相轴的连续性不如裂隙带,它的同相轴错断更明显,其波形更加杂乱,而裂隙带在地质雷达图像上同相轴的连续性反映了裂隙面是否平直、连续。
d.探测时可参考当地的区域地质背景资料和钻孔资料,对可能遇到的地质现象做出大致的判断,为图像解释时对这两种地质现象的分辨识别提供依据。
《雷达成像原理》课件
05
雷达成像技术发展与展望
雷达成像技术的发展历程
雷达成像技术的起源
20世纪40年代,雷达技术开始应用于军事 领域,随着技术的发展,人们开始探索雷达 在成像方面的应用。
雷达成像技术的初步发展
20世纪60年代,随着计算机技术和信号处理技术的 发展,雷达成像技术开始进入初步发展阶段,出现 了多种成像模式。
提取雷达图像中的边 缘信息,用于目标识
别和形状分析。
纹理分析
提取雷达图像中的纹 理特征,用于分类和 识别不同的物质或结
构。
04
雷达图像解译
雷达图像的解译方法
直接解译法
01
根据雷达图像的直接特征,如斑点、纹理、色彩等,对目标进
行识别和分类。
间接解译法
02
利用雷达图像的间接特征,如地形、地貌、阴影等,结合地理
03
雷达图像处理
雷达图像预处理
去噪
去除雷达图像中的噪声,提高图像质量。
标定
对雷达图像进行几何校正和辐射校正,以 消除误差。
配准
将多幅雷达图像进行对齐,确保后续处理 的一致性。
滤波
平滑雷达图像,减少随机噪声和斑点效应 。
雷达图像增强
01 对比度增强
提高雷达图像的对比度, 使其更易于观察和理解。
03 直方图均衡化
雷达成像技术的成熟
20世纪80年代以后,随着数字信号处理技 术的广泛应用,雷达成像技术逐渐成熟,分 辨率和成像质量得到显著提高。
雷达成像技术的未来展望
高分辨率成像技术
未来雷达成像技术将进一步提高分辨率,实现更精细的成像效果 ,为各种应用提供更准确的信息。
多模式成像技术
未来雷达成像技术将发展多种模式,包括透射、反射、合成孔径等 多种模式,以满足不同场景的需求。
雷达遥感图像处理方法与目标识别的基本原理与应用
雷达遥感图像处理方法与目标识别的基本原理与应用概述雷达遥感是一种利用雷达技术获取地球表面信息的遥感技术。
雷达遥感图像处理方法与目标识别是该领域中的关键技术,本文将介绍其基本原理与应用。
一、雷达遥感图像处理方法1. 预处理雷达遥感图像预处理是为了提高后续处理的可靠性和有效性。
包括噪声抑制、几何校正和辐射校正等。
噪声抑制通过滤波、去斑等算法降低雷达图像中的噪声干扰;几何校正将雷达图像与地面实际位置对应起来;辐射校正则是为了消除图像中的辐射差异。
2. 特征提取特征提取是雷达遥感图像处理中的关键一步,目的是将图像中的目标与背景区分开来。
常用的特征包括纹理特征、形状特征和频谱特征等。
纹理特征描述图像中的像素分布和灰度级变化;形状特征描述目标的形态和几何结构;频谱特征描述目标反射和散射特性。
3. 分割与分类分割将雷达图像分为不同的区域,使不同目标或背景出现在不同区域中。
常用的分割算法包括基于阈值、基于边缘、基于区域和基于特征等。
分类将图像中的区域分为不同的类别,以达到目标识别或目标检测的目的。
常用的分类算法包括最近邻分类器、支持向量机、决策树等。
二、目标识别的基本原理目标识别是雷达遥感图像处理的重点任务之一,其基本原理如下:1. 目标特征提取通过特征提取算法提取目标在雷达图像中的特征,包括目标的形状、纹理、尺寸和位置等信息。
这些特征可以用于后续的目标分类和识别。
2. 目标分类通过将目标与已知类别进行比较,将其归入某个类别中。
常用的分类算法包括最近邻分类器、支持向量机和人工神经网络等。
3. 目标检测与定位目标检测是指在雷达图像中找到目标的位置和尺寸。
常用的目标检测算法包括基于阈值、基于边缘和基于模板匹配等。
目标定位是指确定目标在地球表面的精确位置,一般通过地理坐标转换技术实现。
三、雷达遥感图像处理方法与目标识别的应用雷达遥感图像处理方法与目标识别技术在军事、农业、气象和城市规划等领域有广泛应用。
1. 军事雷达遥感图像处理与目标识别在军事领域中具有重要意义。
雷达知识点总结
雷达知识点总结1.雷达的工作原理1 雷达测距原理超高频无线电波在空间传播具有等速、直线传播的特性,并且遇到物标有良好的反射现象。
用发射机产生高频无线电脉冲波,用天线向外发射和接收无线电脉冲波,用显示器进行计时、计算、显示物标的距离,并用触发电路产生的触发脉冲使它们同步工作。
2 雷达测方位原理(1)利用超高频无线电波的空间直线传播;(2)雷达天线是一种定向型天线;(3)用方位扫描系统把天线的瞬时位置随时准确地送到显示器,使荧光屏上的扫描线和天线同步旋转,于是物标回波也就按它的实际方位显示在荧光屏上。
雷达基本组成(1)触发电路(Trigger Circuit)(2)作用:每隔一定的时间产生一个作用时间很短的尖脉冲(触发脉冲),分别送到发射机、接收机和显示器,使它们同步工作。
(3)(4)发射机(Transmitter)(5)作用:在触发脉冲的控制下产生一个具有一定宽度的大功率高频的脉冲信号(射频脉冲),经波导馈线送入天线向外发射。
参数:X波段:9300MHz—9500MHz (波长3cm)S波段:2900MHz—3100MHz (波长10cm)(6)天线(Scanner; Antenna)(7)作用:把发射机经波导馈线送来的射频脉冲的能量聚成细束朝一个方向发射出去,同时只接收从该方向的物标反射的回波,并再经波导馈线送入接收机。
参数:顺时针匀速旋转,转速:15—30r/min(8)(9)接收机(Receiver)作用:将天线接收到的超高频回波信号放大,变频(变成中频)后,再放大、检波,变成显示器可以显示的视频回波信号。
(5)收发开关(T-R Switch)作用:在发射时自动关闭接收机入口,让大功率射频脉冲只送到天线向外辐射而不进入接收机;在发射结束后,能自动接通接收机通路让微弱的回波信号顺利进入接收机,同时关闭发射机通路。
(6)显示器(Display)作用:传统的PPI显示器在触发脉冲的控制下产生一条径向的距离扫描线,用来计时、计算物标回波的距离,同时这条扫描线由方位扫描系统带动天线同步旋转。
合成孔径雷达的图像判读要点分析
合成孔径雷达的图像判读要点分析摘要:合成孔径雷达的具有强大的监测功能,在工业领域、国防领域被广泛应用。
该技术应用具有高分辨率,对气候环境的适应性比较强,在应用过程中将尺寸比较小的天线孔径进行合成,实现合成孔径雷达的制作与应用。
本文对合成孔径雷达应用过程中的图像特点分析,发现其在图像判读应用上仍具有广泛的进步空间,因此,本文提出提高合成孔径雷达图像判读的对策,分析其具体的应用范围。
关键词:合成孔径雷达;雷达图像;工作原理;目标识别引言:雷达通过发射和接收电磁波的方式对物体信息进行检测,在目标行为、形态勘察上被广泛应用,且具有高效优势。
合成孔径雷达的应用具有强大的成像功能,其主要分辨率较高、穿透性较强的雷达实现对目标的识别与成像,目前,该类雷达通常被搭载在卫星或者飞机上,可以实现大范围的覆盖应用,通过搭载物体的移动合成孔径,并成像。
一、合成孔径雷达的工作原理与普通的雷达工作原理相同,通过对电磁波信号的发射与回收,测定与被检测对象之间的距离,并根据脉宽窄实现对检测对象形体的成像。
合成孔径雷达采用相对运动的方式将信号相位进行重叠,将接收信号的空间扩大。
经过数据处理之后,其尺寸与天线雷达相似。
合成孔径雷达主要通过搭载飞机或者卫星等时刻处于移动状态的物体,通过估计运行进行距离测量和成像,根据光学系统应用原理,通过透镜或者反射镜的方式形成图像[1]。
合成孔径雷达在成像的过程中,采用真实孔径侧视雷达的分辨率检测方式。
距离分辨率形成根据电磁波的传播速度、雷达的脉冲宽度、持续时间等进行计算。
合成孔径雷达会因多普勒效应产生方位分辨率,主要根据雷达的孔径长度、探测点距离、电磁波波长等参数,对方位分辨率进行确定和计算。
多普勒效应由雷达的相对运动产生,接收频率与波源频率存在差别,从而产生多普勒效应。
1.合成孔径雷达图像的特点1.图像可读性差对合成孔径的雷达图像特征进行分析,由于雷达需要在相对运动的过程中寻找信号的重叠点,在移动状态下进行成像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NASA对比世贸中心雷达图像用于重建
➢ 美航空航天局(NASA)的一个研究小组展开了一 项研究工作,将对911前后美世贸中心的雷达图 像进行对比和研究,确定该地建筑和地下结构 的破坏程度,获取相关数据为日后的重建提供 帮助。
➢ 这些科学家来自于NASA设在加利福尼亚的喷气 推动实验室,他们还将对废墟地下的电话线和 煤气管道进行研究。负责人阿米尔-费贾尼称: “我们的图像处理技术将为地下的情况提供准 确的信息。”
➢ 由于低角度倾斜照射、不间断的图像覆盖、以 及次要细节的消除等,雷达图像对线性形迹大 为增强。
➢ (1) 对地面的倾斜照射产生了图像明暗效应, 从而增强了断层和破碎带的显示。雷达天线垂 直于线性形迹的地方,阴影和明亮部分最明显。
➢ (2) 雷达图像在抑制次要细节方面有特殊的效 果。其小比例尺、大面积、低分辨力单元本身, 正像一种信息过滤器,滤去了地物噪声的高频 率空间细节,而航空像片的高分辨力,则记录 了地被细部,从而掩盖了其下伏的地质形迹。
➢ 《洛杉磯時報》報道﹐根據雷達圖像﹐那個物 體靠近太空梭后掠過牠﹐也許附在牠的外面。
➢ 多名前宇航局官員說﹐這可能支持一種說法﹐ 那就是太空梭不是發射時發生的事故的受害者 ﹐而是被某種太空垃圾或小隕石擊中。
➢ 分析員相信﹐這類衝擊﹐即使輕柔到太空人、 哥倫比亞號的電腦或休斯頓任務控製中心覺察 不到﹐也可能撞出一個最終摧毀太空梭的傷口。
侧视雷达图像的特性
一、图像的几何特性 ➢ 侧视雷达是距离测量系统,而不是角度测量系
统,因此,与摄影遥感图像比较,其几何性质ቤተ መጻሕፍቲ ባይዱ有多方面的差别。 (一)斜距比例尺不一致 ➢ 机载侧视雷达图像上回波信号之间的间距与相 邻地面特征返回的回波之间的时间间隔成正比。 而这一时间间隔又与传感器同地面目标之间的 倾斜距离成正比,而不是与水平距离成正比。
➢ 地物介电常数越大,回波信号就越强。
➢ 【介电常数】又称为“电容率”或“相 对电容率”。在同一电容器中用某一物 质作为电介质时的电容与其中为真空时 电容的比值称为该物质的“介电常数”。 介电常数通常随温度和介质中传播的电 磁波的频率而变。电容器用的电介质要 求具有较大的介电常数,以便减小电容 器的体积和重量。
侧视图像与正视图像比例尺比较
➢ 上图A、B、C代表大小相同的地物,它们之间 的距离也相等,分别在近、中和远距离上。它 们相应的地面距离分别为GRA、GRB、GRC。
➢ 侧视图像是直接根据信号的返回时间成像,不 能反映地物间相等的距离和地物本身的相等宽 度,结果使图像比例尺在近距离处比例尺较小, 远距离处比例尺很大。
➢ 因为当雷达脉冲遇到垂直的地物时,先到达地 物的顶端,后到达其基部。于是从垂直地物的 顶端返回的信号也就先于基部到达天线。这就 会使垂直地物发生上下位移,即像点位移的方 向朝向扫描线上的投影中心。这种上下位移效 应在近距离内表现得尤为突出。
➢ 下图比较这一效应与航空摄影的投影差 。
侧视雷达图像与航空摄影图像 的投影差比较
➢ 当斜坡背向飞机,坡度又比俯角陡(地物 C和D)时,无脉冲照射的区域将扩大到斜 坡后面的非坡面区。
➢ 由于俯角的缩小,盲区的长度随距离的 增大而增大。因此远距离地物,投射出 很宽大的盲区,但是如果是在近距离时, 则可完全接收脉冲照射。
(三)视差
➢ 当一个地面目标从两条不同的航线两次成像时, 在侧视雷达图像上就会因不同的投影差而出现 图像视差,使图像可以作立体观察。
侧视雷达图像的视差
二、图像色调特征及透视信息
➢ 侧视雷达图像色调深浅反映地物后向散射回波 的弱强。
➢ 地物回波强弱主要影响因素包括地物表面的几 何性质和介电性质。
➢ 地物表面几何性质对雷达回波的影响,取决于 地物表面粗糙度、雷达工作波长和波束照射俯 角三者关系。只有三者恰当配合、相互制约才 会产生较强的回波。
➢ 透视缩减与上下位移都与雷达盲区现象相关。
➢ 背向雷达天线的坡面所接收的信号很弱,或者 根本没有信号接收。
➢ 地物A的右侧背向飞机,其坡度又小于俯角, 因而还能得到雷达脉冲的照射。但这种脉冲照 射非常轻微,回波也就很弱,图像比较阴暗。
➢ 地物B的右侧斜坡与俯角平行,得不到雷达脉 冲的照射,雷达天线就接收不到这段时间内的 回波,图像呈黑色(盲区)。
1.覆盖范围大 ➢ 对地面的覆盖范围取决于飞行高度和由近射程
到远射程的俯角。一般在图像比例尺较小、航 高较大的情况下,单个成像条带可长达几百公 里、宽几十公里。比其它航空遥感大很多。 ➢ 雷达图像几何畸变小,很容易镶嵌成图,从而 为区域分析提供了宽广的视域。 ➢ 雷达图像可以放大,以供详细判读。
2.线性形迹增强
➢ 微波不受云、雾等阻挡,且对某些物体有较强 的穿透能力,因而侧视雷达图像能反映出某些 物体表面以下一定深度的信息。
➢ 微波穿透地面物体的深度随物体性质而异,并 随波长的增加而增大。对于干沙、冰层等可穿 透几十米甚至上百米,而对于水体则几乎不能 穿透,地面湿度越大穿透深度越小。
侧视雷达图像判读特点
真实孔径雷达图像
合成孔径雷达图像
侧视雷达立体像对(高低视差)
➢ 然而,由于雷达的侧视效应,构成立体的两张 图像是相反的,因而用这种方法来作立体观察 相对困难一些。
➢ 因此,雷达立体图像常常采用同一航线,不同 高度的高度视差。在这种情况下,雷达的照射 方向和侧视效应在两张图像上都很相似。
➢ 图像视差除供立体观察之外,其大小还能量测 出来,可用以计算目标的近似高度。
➢ 因此在侧视图像上,地物宽度是A<B<C,而地 物之间距离是AB<BC。用双曲线校正,就可以 取得比例尺基本相同的图像。
➢ 假定地面平坦的情况下,可以根据斜距和航高 来确定近似的地面距离。
(二)投影差
➢ 与热红外扫描成像一样,侧视雷达图像的投影 差是一维的,并与航线正交,但其投影差方向 即像点位移方向却正好是相反的。
上下位移与透视缩减
➢ 发生最大上下位移的地方是在短距离处, 这里天线俯角较大。上图A、B两地物的 坡顶比坡底先成像,产生上下位移效应。
➢ 当面向天线的坡度比雷达波面坡度小时 (地物D)不产生上下位移。但其坡面大小 在图像上被压缩(透视缩减)。
➢ 地物C,其前坡恰好跟俯角方向相垂直, 结果其前坡的影像被透视缩减为零。
➢ 就在911事件发生之前,科学家们曾对世 贸中心地区的地下结构进行过雷达拍照, 现在它们已经在重建工作中得到了应用, 只是这些图像并不十分清楚。
➢ 费贾尼指出:“对前后两组图像进行对 比可以帮助我们对地下结构的变化加以 了解,对其破坏程度加以评估。”
雷達圖像發現哥倫比亞號遭不 明物體撞
➢ 美國宇航局官員星期六晚說﹐搜索例常雷達樣 品的國防部官員發現﹐太空梭哥倫比亞號執行 任務的第二天納入軌道時附近有一物體的證據。