左转角附合导线坐标计算1
附合导线坐标计算
x34=D34 cos34=94.182 cos 29°36′58″=+81.878m
增
y34=D34 sin34=94.182 sin 29°36′58″=+46.543m
量
x4C=D4C cos4C=147.440 cos 4°42′26″=+146.943m
738.350 +615.632 +365.222 +615.714 +365.329
一.计算起始边、终边坐标方位角
RAB tan1
yAB xAB
tan1
yB yA xB xA
tan1 674.657 591.951 431011 1238.985 1150.821
△xAB>0,△yAB > 0,Ⅰ象限
B
1 178°22′30″
B 180°13′ 36″
点 转折角 (右) 号
⁰ ′″
A
B
+2
180 13 36
1
+2 178 22 30
2
+1 193 44 00
3
+2 181 13 00
4
+2 204 54 30
C
+2 180 32 48
D
改正后 转折角 ⁰ ′″
180 13 38 178 22 32 193 44 01 181 13 02 204 54 32 180 32 50
α23= α12+180°-β2=44°34′01″+ 180°-193°44′01″ = 30°50′00″
α34= α23+180°-β3=30°50′00″+ 180°-181°13′02″ = 29°36′58″ α4C= α34+180°-β4=29°36′58″+ 180°-204°54′32″= 4°42′26″
测绘中级 附合导线测量的内业计算的方法步骤
测绘中级附合导线测量的内业计算的方法步骤-CAL-FENGHAI.-(YICAI)-Company One1第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)y图6-10 坐标增量计算根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
左转角附合导线坐标计算
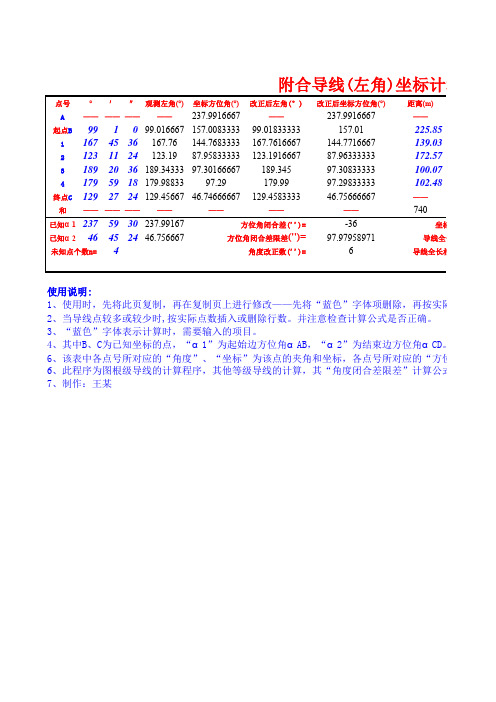
点号°′″观测左角(°)坐标方位角(°)改正后左角(°)改正后坐标方位角(°)距离(m)A ————————237.9916667——237.9916667——起点B 991099.016667157.008333399.01833333157.01225.8511674536167.76144.7683333167.7616667144.7716667139.0321231124123.1987.95833333123.191666787.96333333172.5731892036189.3433397.30166667189.34597.30833333100.0741795918179.9883397.29179.9997.29833333102.48终点C 1292724129.4566746.74666667129.458333346.75666667——和——————————————740已知α12375930237.99167-36已知α246452446.75666797.9795897146方位角闭合差限差('')=导线全长闭(m)=7、制作:王某4、其中B、C为已知坐标的点,“α1”为起始边方位角αAB,“α2”为结束边方位角αCD。
n为待定的3、“蓝色”字体表示计算时,需要输入的项目。
6、此程序为图根级导线的计算程序,其他等级导线的计算,其“角度闭合差限差”计算公式及“导线全6、该表中各点号所对应的“角度”、“坐标”为该点的夹角和坐标,各点号所对应的“方位角附合导线(左角)坐标计算表使用说明:1、使用时,先将此页复制,再在复制页上进行修改——先将“蓝色”字体项删除,再按实际数2、当导线点较多或较少时,按实际点数插入或删除行数。
并注意检查计算公式是否正确。
未知点个数n=方位角闭合差('')=坐标闭角度改正数('')=导线全长相对ΔX(m)ΔY(m)改正后ΔX(m)改正后ΔY(m)X(m)Y(m)————————————-207.9114288.210339-207.867204688.168945372507.691215.63-113.56801180.197555-113.540792380.172073712299.82281303.79896.1329745172.46099 6.166759074172.42935682186.2821383.971-12.729791999.257026-12.7102008599.238685552192.44881556.4004-13.0186242101.64972-12.99856139101.63093862179.73861655.6391————————2166.741757.27-341.094872541.77563-340.95541.64————-0.1448720.1356280.1984513728.8794<1/2000全长闭合差(m)=方位角αCD。
(完整版)附合导线平差教程
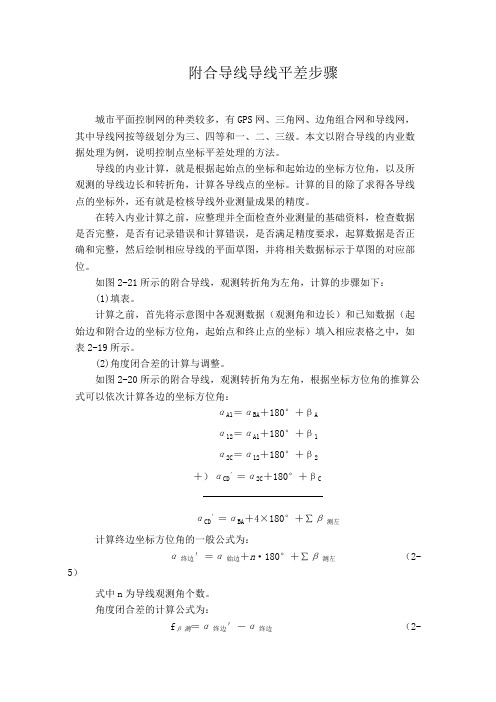
附合导线导线平差步骤城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。
如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下:(1)填表。
计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。
(2)角度闭合差的计算与调整。
如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角:αA1=αBA+180°+βAα12=αA1+180°+β1α2C=α12+180°+β2+)αCD′=α2C+180°+βCαCD′=αBA+4×180°+∑β测左计算终边坐标方位角的一般公式为:α终边′=α始边+n·180°+∑β测左(2-5)式中n为导线观测角个数。
角度闭合差的计算公式为:fβ测=α终边′-α终边(2-6)图2-21 附合导线计算示意图角度闭合差fβ的大小,表明测角精度的高低。
对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为:nfβ容=±60″(2-7)式中n为多边形内角的个数。
这一步计算见辅助计算栏,fβ测=+41″,fβ容=±120″。
附合导线测量的内业计算
第三节导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x、y。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算y图6-10 坐标增量计算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα 2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
专业资料附和闭合左右角导线附合导线自动计算表

附合导线平差计算表(左角用)
计算:检查:
注意事项:
1、使用时,先根据实际点数的多少插入或删除行数。
但第五行和第六行不得删除,夹角个数行及上6行不要删除,目的是为了保
持公式的正确性,行数确定后,从第六行F列到W列选中,把公式拉到您需要的行数
2、“蓝色”字体表示计算时,需要输入的项目,根据实际数据情况进行填写。
3、要根据使用的等级导线,来修改“角度闭合差限差”计算公式(N20数据)及“导线全长相对闭合差”(Q22数据)
4、如果“N21”和“Q22”显示超限则数据不可用,要重新进行测量
5、计算好后可以把不需要显示的列隐藏起来,如“M”列
)
附合导线平差计算表(右角用)。
附合导线以及闭合导线方位角计算
+8 13 36 180
+8 22 30 178
+8 44 00 193
13
+8 00
181
54
+8 30
204
32
+8 48
180
13 22 44 13 54 32
44 38 08 08 38 56
43 03 28 44 40 50 30 56 42 29 43 34
4 48 56
124.08 164.10 208.53 94.18 147.44
YB= 673.4精5选可编辑ppt
18
图表:附合导线坐标计算表
点 号
转折角 (右)
改正后 转折角
方位角
边长 D
坐标 增量(米)
改 正 后 坐标(米) 增量(米)
点 号
(米) X Y X Y X Y
A
43 17 12
B 5 6 7 8 C
180 178 193 181 204 180
=精选x²可+编辑y²pp=t 0.120
K = D
0
=
1 4000
<1
2000
14
例题:
用EXCEL程序进行闭合导线计算
精选可编辑ppt
15
(四)附合导线平差计算
说明:与闭合导线基本相同,以下是两者的不同点:
1、角度闭合差的分配与调整 方法1:
(1)计算方位角闭合差: f 终计算 终已知
+23.78 -91.32 472.34 350.62
4
+63.94 -21.89 +63.93 -21.88 536.27 328.74
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点号°
′
″观测左角(°)
坐标方位角(°)
改正后左角(°)
改正后坐标方位角(°)
JH12————
——
——
179.7303167——
237.9916667JH11280
644.25280.1122917279.8426084242.9672273300.9588941170936.75170.1602083270.0028167133.015144253.97403821792611179.4363889269.4392056142.2913245216.265362531802415.25180.4042361269.8434417143.2591718179.524534241525558.5152.9329167242.7763584115.7878523115.312386552173023.75217.5065972280.2829556180.3615329115.673919461714014.25171.670625271.9535806134.525560670.19948005终点C 1774024.5
177.6734722
269.6270528
140.5284079
75.84079441
和————
——
——
——
——
——
已知α12375930237.9916667802333.3901已知α2
46
452446.75666667
97.979589714
-133722.2317
3、“蓝色”字体表示计算时,需要输入的项目。
4、其中B、C为已知坐标的点,“α1”为起始边方位角αAB,“α2”为结束边方位角αCD。
n为待定的6、该表中各点号所对应的“角度”、“坐标”为该点的夹角和坐标,各点号所对应的“
6、此程序为图根级导线的计算程序,其他等级导线的计算,其“角度闭合差限差”计算公式及“导线全
未知点个数n=
角度改正数('')=
使用说明:
1、使用时,先将此页复制,再在复制页上进行修改——先将“蓝色”字体项删除,再按
2、当导线点较多或较少时,按实际点数插入或删除行数。
并注意检查计算公式是否正确。
附合导线(左角)
方位角闭合差('')=方位角闭合差限差('')=
距离(m)ΔX(m)ΔY(m)改正后ΔX(m)
改正后ΔY(m)
X(m)——
——
——
——
——
307628.8879829.269426.595-711.129-105516.609-49789.654307072.8098
416.535-114.994-400.347-53329.394-25052.087201556.2008322.622-260.126-190.839-41476.677-19284.537148226.8066458.962-458.946 3.809-59093.605-27158.883106750.1295354.883-151.731320.811-45489.785-20682.18647656.52463202.59-87.772182.589-25969.643-11807.2702166.74108.356
36.705
101.950
-13806.308
-6310.870
-23802.90339——
——
——
——
——
2166.74
2382.271-559.2022016
-977.6954784-304906.0698-141967.3466
——
304346.8676
140989.6511
335417.7955
0.007102399<1/2000
结束边方位角αCD。
n为待定的导线点的点数。
应的“方位角”、“距离”为该点至下一点的方位角及平距。
合差限差”计算公式及“导线全长相对闭合差”数值要修改。
导线全长相对闭合差K=1/
,再按实际数据进行填写。
正确。
左角)坐标计算表(范本)
坐标闭合差fx(m)=
坐标闭合差fy(m)=
导线全长闭合差(m)=。