MLX90251线性霍尔效应传感器
PM传感器IDE分流故障解决方案

PM传感器IDE分流故障解决方案全球微电子工程公司——Melexis 公司,通过发布 MLX91210 系列,基于尖端的霍尔效应技术实现,进一步扩展了其全面的电流传感器产品组合。
MLX91210 IC 采用 5V 电源供电,电流灵敏度等级低至26.7mV/A,并支持最大±75A、相当于 30ARMS 电流的线性电流测量范围。
这种全集成霍尔效应电流传感器采用 SO8 和 SO16 封装形式供货,电阻损耗极低(SO8 为 0.8mΩ,SO16 为 0.7mΩ),并提供高电压隔离等级(分别为 2.1kVRMS 和 2.5KVRMS),以及更快的响应(仅在 5us 内)。
所有 IC 的传感器输出都针对特定电流范围进行了工厂标定,并针对与温度相关的、在其工作寿命期间内的最优稳定性进行了补偿,从而可维持长期精度。
由于对零电流输出点和灵敏度预先做了工厂标定,所有的器件都提供了与直接流经 IC 引线框架的电流成比例的线性模拟输出。
在IC 封装内部,电流流动产生的磁场通过两组霍尔板差分检测。
这一设置用来对抗外部磁场和串扰的效果。
将霍尔板与电流导体靠得很近可实现优异的信号完整性,但是同时强大的绝缘层又将初级侧和次级侧相分离。
该器件对外部磁场表现出强大的鲁棒性,而随着电力电子设计的密度增加,这将变得更加重要。
然而,关键的区别是会见到几乎不存在的磁滞现象,这是由于设计不需要铁磁集中器所产生的。
该传感器支持 -40℃至 125℃的温度范围,并符合 IEC-60950(此外,SO16 封装的器件遵循 UL1577)。
由于其高速和紧凑的尺寸,同时支持 DC 和 AC 电流测量的MLX91210 芯片的主要应用通常包括:服务器群和数据中心、电源和转换器、需求响应负荷控制、家用 / 家电智能计量和智能能源、太阳能转换器和汇流箱,以及电机控制。
“随着政府对更高的效率及能源成本不断上升引起的财务问题建立新的立法措施,家庭和工业环境中有了更大的动力采用紧凑的电流 / 电力监控解决方案。
MELEXIS汽车传感器产品介绍

偏置Offset, 敏感度匹配 敏感度匹配Gain Mismatch, 前端内部线性补偿 (偏置 偏置 相位差补偿Orthogonality) 相位差补偿 后端多点调校线性度补偿
磁路
简单,可靠的磁路设计 简单, 既可安装于轴末端, 既可安装于轴末端,可以安装于轴上 磁铁价格低廉 各种材料 各种大小 环状, 。。。) 各种形状 (环状,条形,方形。。。 环状 条形,方形。。。
© Copyright Melexis Microelectronic Integrated Systems. All Rights Reserved
Tria⊗is™角度位置传感器 ⊗ ™ 位置传感器 MLX90316特性 特性
平面贴片 (SOIC-8 – TSSOP-16) 体积小 内部 DSP 冗余设计 (在TSSOP-16封装中有两枚芯片) 自我诊断能力 可替代其他传感器(互感,AMR, GMR…)
Throttle Position Sensor (TPS)
EMS ECU (Engine Management System Electronic Control Unit)
Actuator
踏板位置传感器( ) 踏板位置传感器(PPS)
© Copyright Melexis Microelectronic Integrated Systems. All Rights Reserved
Motor
© Copyright Melexis Microelectronic Integrated Systems. All Rights Reserved
MCU
SPI
Position Sensor
e.g. MLX90316
Tria⊗is 摇杆位置传感器 ⊗ MLX90333
霍尔IC著名厂家产品功能特性汇总(MELEXIS, ALLEGRO, INFENION,AKM, HONEYWELL)

ALLEGRO品牌霍尔专区Allegro MicroSystems 公司在高性能电源和霍尔效应传感器集成电路的开发、制造及营销领域始终引领全球潮流。
Allegro 独具创新的解决方案服务于汽车市场中的高增长应用,此外也开发办公自动化、工业和消费通讯解决方案。
Allegro 主要为电动机控制、调节及磁场感测应用开发集成电路解决方案。
提供高度集成的混合信号IC,不仅元件数量日益增多,功能也更加强大。
A1201参数下载A1202参数下载A1203参数下载A1204参数下载A1205参数下载A1101参数下载A1102参数下载A1103参数下载A1104参数下载A1106参数下载A1321参数下载A1322资料下载A1323参数下载A1642参数下载A3121参数下载A3187参数下载A3212参数下载A3240参数下载A3280参数下载A3282参数下载A3955参数下载A3977参数下载A8904参数下载ACS712参数下载ACS712参数下载ACS712参数下载ATS616参数下载ATS674参数下载注:点击霍尔型号查看详细参数MELEXIS品牌霍尔专区来源: 发布时间: 2012-04-11 00:13 1579 次浏览大小: 16px 14px 12px MELEXIS公司是一家专业的集成电路公司,10多年来,Melexis公司已开发出世界一流的,创新的混合信号半导体,依靠优秀的技术,在霍尔IC的研发能力和速度在业内是屈指可数的,在降低系统成本和产品设计的灵活性和优越的霍尔质量可靠性方面具有很大的MELEXIS公司是一家专业的集成电路公司,10多年来,Melexis公司已开发出世界一流的,创新的混合信号半导体,依靠优秀的技术,在霍尔IC的研发能力和速度在业内是屈指可数的,在降低系统成本和产品设计的灵活性和优越的霍尔质量可靠性方面具有很大的竞争优势。
在全球的各种汽车品牌中基本上都有Melexis设计研发的霍尔集成电路。
可编程线性霍尔全自动编程控制机器人的设计与制作

第36卷第2期2020年6月沧州师范学院学报JournalofCangzhouNormalUniversityVol.36,No.2Jun.2020可编程线性霍尔全自动编程控制机器人的设计与制作徐中林,董庆运(沧州师范学院现代教育技术中心,河北沧州061001)摘 要:霍尔效应传感器在汽车工业领域有着广泛的应用.当前普遍使用的传感器一般是采用人工方式对霍尔元件进行编程和数据写入,操作过程重复、繁琐,在大批量生产中容易产生疲劳,导致操作失误.为此,设计并制作了一种可编程线性霍尔全自动编程控制机器人,使用“控制机器人”取代人手来移动鼠标、操纵电脑程序,同时输出控制信号操纵马达、气缸等设备.经实验验证,该设计能够取代一些操作繁琐且重复的工作,成本低,操作简单,性能稳定,工作可靠.关键词:可编程线性霍尔器件;全自动机器人;角度传感器;汽车电子节气门;Arduino中图分类号:TP212.6 文献标识码:A 文章编号:2095 2910(2020)02 0052 04可编程线性霍尔元件可用来取代传统的电阻膜片,广泛应用于各种测量仪器中,在线性位置测量、角度测量、磁场与电流及位移测量等方面独具优势[1 3],可满足汽车和工业领域的低成本应用方案.使用此类器件一般要求具有指定公司提供的专用程序和专用写入设备,因此具有较强的垄断性.目前提供的写入设备和程序仅可通过人工进行操作,操作过程重复、繁琐,如果需要批量生产,只能购买昂贵的专用烧写编程器和专用程序,对于中小企业来说无疑是较大的负担[4].笔者进行了可编程线性霍尔全自动编程控制机器人的设计与制作研究,意在使用电脑机器人代替工人繁琐的操作,为企业节省经济成本和时间成本,提升企业效益.1 系统的工作原理系统的工作原理与工作思路可通过以下事例说明:某汽车配件厂生产电子节气门体,使用的角度传感器芯片为Melexis公司的可编程霍尔集成电路MLX90360.生产过程中,需要将磁场旋转出两个以上的角度进行数据标定,以便在指定的角度输出相应的电压值.专用烧写程序和烧写仪器则必须使用Melexis公司提供的基于Windows下的操作程序Melexisprogrammabletoolbox,以及对应的芯片烧录器PTC 04[5 6].2 系统运行过程中的困境目前,生产过程中的相关操作都是由工人手动完成,每一件产品都要进行以下步骤:依次使用鼠标点击程序中DieA和DieB的“Newdevice”、“Setsettings”、“SetGain”、“DefineDP”、“Characterize”,共计10个确认动作,通过这些动作建立新的芯片信息.之后,在第一个指定位置点击DieA“setpoint0”、DieB“setpoint0”,写入该点的磁场信息;将磁钢旋转到第二个指定位置后再次点击鼠标的DieA“setpoint1”、DieB“setpoint1”,写入第二个点位的磁场信息;如果有第三个位置信息,还需点击DieA“setpoint2”、DieB“setpoint2”;按照类似的方法,依次点击之后所有的按钮.每一件产品需要点击鼠标达22次以上.生产过程中,双眼必须紧盯屏幕,同时还要操作旋转的机器以调整磁场的角度.由于动作繁琐,工人极易疲惫,导致废品率较高、生产效率低下.3 系统运行困境的破解方案和思路设计可编程线性霍尔全自动编程控制机器人,意在使用电脑机器人代替工人进行繁琐的操作.工作时,收稿日期:2019 12 19作者简介:徐中林(1968 ),男,河北吴桥人,沧州师范学院现代教育技术中心实验师,研究方向:自动化、机电一体教育技术;董庆运(1990 ),男,河北沧县人,沧州师范学院现代教育技术中心讲师,研究方向:云计算、通信运维.只需按下一个按钮,控制机器人将自行完成所有鼠标的移动和左键确认,并将产品自动旋转到指定的角度,点击对应的按钮DieA~B Setpoint0~2写入预制的数据,然后再次将磁场旋转到第二个指定角度写入数据,并且在完成数据写入后进行验证和锁定,操作简单,正确率为100%.图1 可编程线性霍尔全自动编程控制机器人工作思路图本产品使用简单易学的Arduino[78]作为编程执行机器人,具体的工作思路如图1所示.利用两相八拍步进电机的驱动程序直接产生相位差的信号分别给出X,Y两路脉冲,转换成光电信号;光电信号则分离出鼠标所需要的AB相位,控制鼠标箭头在屏幕上精确地上下左右运动,并在指定的位置给出一个高电平作为鼠标确认左键信号;同时程序会在指定的位置同步输出马达控制信号或者气缸控制信号,控制转轴的磁场旋转到指定的角度.4 机器人的设计、制作与使用4.1 硬件的需求电脑主机为市场销售的普通家用计算机,电脑主机上运行的编程程序programmabletoolbox、以及程序所需要的烧写器PTC 04由厂家提供,其他部分均自行研制和开发.控制使用的Arduino可以在市场采购,所采用的为ATMEGA32U4开发板ProMicro5V/16MHz兼Arduino,电路转接板为自行设计制作.4.2 程序的编写对于机器人电脑控制中心部分的编程,所用的Arduino编程软件为Arduino1.52,程序设计根据需求自行定义,如下:#include<Steper28BYJ48.h>//调用步进电机驱动Steper28BYJ48x(8,6,8,7,9);//设置鼠标X轴运动方向和步数Steper28BYJ48y(8,2,4,5,3);//设置鼠标Y轴运动方向和步数intK=13;//编程工作信号输出intOP=12;//节气门体门板打开intCL=11;//节气门体门板全部关闭intmouse=10;//把第10脚作为鼠标的左键执行键intST=0;//开始编程信号输入intval;voidsetup(){pinMode(OP,OUTPUT);pinMode(CL,OUTPUT);pinMode(K,OUTPUT);pinMode(mouse,OUTPUT);pinMode(ST,INPUT);digitalWrite(ST,HIGH);//把开始编程引脚置位高电平,低电平有效}……y.step( 53);x.step( 15);digitalWrite(mouse,HIGH);delay(200);digitalWrite(mouse,LOW);//finish R,x.step( 90);digitalWrite(mouse,HIGH);delay(200);digitalWrite(mouse,LOW);//finish l,delay(150);x.step(40);y.step(160);x.step( 80);//返回屏幕的左上角作为起始点digitalWrite(K,LOW);编程完毕,向总控制器传送完毕信号}delay(300);}程序至此,由Arduino控制板所产生的电信号分别是X Y轴的光电信号、鼠标左键确认信号、驱动光电子节气门体的满开度及全关闭电信号、向外围控制系统提供开始输入信号、机器人电脑控制中心所发出的“正在编程”的输出开关信号.4.3 电路设计鼠标驱动使用市场普及鼠标的滚球芯片EMB4502,由单片机Arduino提供的L,X,Y轴的光电信号分别输入到芯片的9,10,11,12,13,然后再输出三路信号作为伺服马达控制信号和自动编程工作状态信号,一路输入信号作为自动编程启动信号.图2 样品实物图按照图纸制作的样品实物如图2所示.所有导线连接完毕后,将鼠标插头插入计算机,重新启动后识别鼠标芯片.启动编程软件Melexisprogramma bletoolbox,设置好参数后将鼠标指针移动到屏幕的左上角,按下开始键,自动编程开始.观察鼠标移动方向和点击位置,如果位置不准确则调整对应的x.step(?)、y.step(?)以及内部的参数,并观察鼠标指针移动的位置是否符合要求.最后,验证编程结果是否符合生产要求.(注:语句括号中的?为数字,代表需要从原点挪动的步数.数字的格式为带正负号的整数,其中x.step(?)代表横向移动的步数,正数为向右移动,负数为向左移动;y.step(?)代表纵向移动的步数,正数为向下移动,负数为向上移动.)4.4 产品实验效果测评在产品的设计与制作时,使用Arduino系列promini改进版ATMEGA328P作为主控制芯片,使用机械鼠标的驱动电路EM84502作为电脑鼠标控制.生产实验的产品为东风小康汽车工业使用的电子节气门体,其芯片型号为MELEXIS 90360ACD,对其进行编程.实验要求连续24小时反复写入和验证,误差为零,实验期间无人工干扰和操作.每个产品的编程时间仅为22秒,速度远超过人工操作,而且可以将其作为全自动生产线上的一个环节.利用当前的研究和设计结果,为河北省沧州市某企业汽车电子节气门体的生产线制作了一个实验样品.在汽车电子节气门体中,需要反馈给中央控制器的角度信号为0.75V~4.75V的模拟电压,同时还要输出一组冗余电压信号作为基准,两路信号在任意角度时输出电压之和等于5V.所采用的角度传感器芯片为Melexis公司的可编程霍尔集成电路MLX90360,它需要将主轴磁场旋转出两个以上的角度进行数据标定,以便在指定的角度输出指定的电压值.在全自动操作中,首先对机器人电脑控制中心部分进行编程,让其产生电脑鼠标的操作信号和相对节点的角度驱动控制信号;所有的信号产生后还需有相应的配套电路来完成实体驱动.通过安装由Melexis公司提供的基于Windows下的操作程序Melexisprogrammabletoolbox以及对应的芯片烧录器PTC 04,来实现对编程计算机进行控制,并且同步输出一个高电压大电流的驱动器,来驱动汽车电子节气门体主轴门板旋转.经验证,产品使用效果良好.5 结束语设计并制作了一种可编程线性霍尔全自动编程控制机器人,用单片机或者Arduino代替人工来控制计算机鼠标和外部控制电路,实现机器人代替人工的产业变更.在实际生产中,可以取代人工进行一些操作繁琐且重复的工作,成本低,操作简单,性能稳定,工作可靠.参考文献:[1] 吕飞.单芯片CMOS三维微型霍尔磁传感器研究[D].南京:南京大学,2017.[2] 李思霖.霍尔效应原理及应用研究[J].电子世界,2018,(2):80 81.[3] 吕德刚,都泽源,李松.永磁无刷电机霍尔位置传感器容错控制[J].电机与控制学报,2019,23(2):44 52.[4] 李芳.高性能霍尔器件的研制与性能优化[D].西安:西安电子科技大学,2016.[5] 袁德胜.基于MLX90360的电子油门位置反馈设计[J].山西电子技术,2018,(3):44 46.[6] 陈科球,谢伟广.一种新型汽车节气门角度传感器设计[J].传感器与微系统,2014,33(6):80 81.[7] [美]班兹.爱上Arduino[M].于欣龙,郭浩 译.北京:人民邮电出版社,2011.[8] 闫洪猛.基于Arduino的移动机器人控制系统设计[J].电子技术与软件工程,2018,(7):106.犜犺犲犇犲狊犻犵狀犪狀犱犕犪狀狌犳犪犮狋狌狉犲狅犳犪犘狉狅犵狉犪犿犿犪犫犾犲犔犻狀犲犪狉犎犪犾犾犃狌狋狅犿犪狋犻犮犘狉狅犵狉犪犿犿犻狀犵犆狅狀狋狉狅犾犚狅犫狅狋XUZhong lin,DONGQing yun(ModernEducationalTechnologyCenter,CangzhouNormalUniversity,Cangzhou,Hebei061001,China)犃犫狊狋狉犪犮狋:Hall effectsensorsarewidelyusedinthefieldofautomobileindustry.Atpresent,thecom monlyusedsensorsaregenerallyprogrammedwithdataputtingintotheHallelementmanually.Theoper ationprocessisrepetitiveandtroublesome,whichispronetofatigueandoperationerrorsinmassproduc tion.AprogrammablelinearHallautomaticprogrammingcontrolrobotwasdesignedandmanufacturedtoaddresstheproblems.This“controllingrobot”replacesthehumanhandtomovethemouseandmanipu latethecomputerprogram,andatthesametimeitsendsoutthecontrolsignaltooperatethemotor,cylin derandotherequipment.Thisdesigncanreplacesometediousandrepetitivework,withtheadvantagesoflowcost,simpleoperation,stableandreliableperformance,andsoon.犓犲狔狑狅狉犱狊:programmablelinearHalldevice;fullyautomaticrobot;anglesensor;automobileelectronicthrottle;Arduino[责任编辑:尤书才 武玉琳]。
Melexis霍尔原件分类
Triaxis三轴霍尔芯片部件编号说明2SA-10 Integrated 2-Axis Hall SensorCSA-1V Current SensorMLX90316 旋转角度位置传感器芯片MLX90324 "在引擎罩下"旋转位置传感器,支持SENT 协议MLX90324 archive Under-the-Hood Rotary Position sensor, feat. SENT protocolMLX90333 Triaxis™3D-Joystick Position SensorMLX91205 Current Sensor传感器芯片:霍尔效应MLX90324 "在引擎罩下"旋转位置传感器,支持SENT 协议MLX90324_archive Under-the-Hood Rotary Position sensor, feat. SENT protocol特殊用途霍尔芯片MLX90217 凸轮传感器MLX90224 Dual Hall Effect LatchMLX90248 (New Generation) Micropower & Omnipolar Hall Switch-Very High Sensitivity MLX90254 差分动态霍尔效应传感器线性霍尔芯片MLX90215 Precision Programmable Linear Hall ICMLX90242 Linear Hall Effect SensorMLX90251 可编程的线性霍尔效应传感器MLX90277 Dual Programmable Linear Hall Effect Sensor霍尔效应单极开关US5781 单极霍尔开关- 中等灵敏度US5782 单极霍尔开关-中等灵敏度US5881 单极霍尔开关-低灵敏度霍尔效应双极开关US2881 双极霍尔开关-非常高的灵敏度US2882 双极霍尔开关-非常高的灵敏度US2884 双极霍尔开关-非常高的灵敏度US4881 双极霍尔开关-低压& 非常高的灵敏度霍尔效应锁闩器US1881 霍尔闩锁器–高度灵敏度US3881 霍尔闩锁器–低压&高度灵敏度霍尔效应风扇电机驱动器MLX90283 振动电机驱动器US168 单线圈风扇驱动器-低噪声& 低电压(转速计输出) US169 单线圈风扇驱动器-低噪声& 低电压(报警输出)US62 双线圈风扇驱动器(转速计输出)US63 双线圈风扇驱动器(报警输出)US65 双线圈风扇驱动器-低噪声& 高输出电流(转速计输出) US651 双线圈风扇驱动器-低噪声(转速计输出)US66 双线圈风扇驱动器-低噪声& 高输出电流(报警输出) US661 双线圈风扇驱动器-低噪声(报警输出)US72 单线圈风扇驱动器-高电压(转速计输出)US73 单线圈风扇驱动器-高电压(报警输出)US79 智能风扇电机驱动器US890 双线圈风扇驱动器-高输出电流(转速计输出)US891 双线圈风扇驱动器-高输出电流(报警输出)US90A 双线圈风扇驱动器-高电压(转速计输出)US91A 双线圈风扇驱动器-高电压(报警输出)。
一种高速可编程线性霍尔传感器[实用新型专利]
![一种高速可编程线性霍尔传感器[实用新型专利]](https://img.taocdn.com/s3/m/8c2bcd6c302b3169a45177232f60ddccdb38e660.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201620249845.9(22)申请日 2016.03.23(73)专利权人 宁波锦澄电子科技股份有限公司地址 315599 浙江省奉化市东郊开发区宝峰路61号宁波锦澄电子科技股份有限公司(72)发明人 周红战 李涛 项乾坤 周旭光 (51)Int.Cl.G01D 5/14(2006.01)(54)实用新型名称一种高速可编程线性霍尔传感器(57)摘要本实用新型公开了一种高速可编程线性霍尔传感器,包括可编程霍尔灵敏度编程系统与多级精度校准系统,可编程霍尔灵敏度编程系统包括依次连接的传感器灵敏度模块、初始增益模块与高精度增益模块,多级精度校准系统包括零点校正模块、增益温度系数校正模块与输出精度校正模块,高精度增益模块通过零点校正模块与增益温度系数校正模块连接,增益温度系数校正模块与输出精度校正模块之间连接有带宽编程模块,输出精度校正模块通过AB类驱动输出级后连接到输出端口。
采用全模拟的信号处理电路,使霍尔片具有高速响应能力,在180mV/mT的灵敏度下,能保证小于5微秒的响应时间。
可编程霍尔片灵敏度编程系统,可保证霍尔片具有更宽的可调范围。
权利要求书1页 说明书2页 附图1页CN 205482990 U 2016.08.17C N 205482990U1.一种高速可编程线性霍尔传感器,其特征在于包括可编程霍尔灵敏度编程系统与多级精度校准系统,所述的可编程霍尔灵敏度编程系统包括依次连接的传感器灵敏度模块、初始增益模块与高精度增益模块,所述的多级精度校准系统包括零点校正模块、增益温度系数校正模块与输出精度校正模块,所述的高精度增益模块通过零点校正模块与增益温度系数校正模块连接,所述的增益温度系数校正模块与输出精度校正模块之间连接有带宽编程模块,所述的输出精度校正模块通过AB类驱动输出级后连接到输出端口。
HAL251低电压功耗霍尔传感器

HAL251the following on a single silicon chip HAL251 Hall-effect sensor is a temperature stable, stress-resistant, Low Tolerance of Sensitivitymicro-power switch. Superior high-temperature performance is made possible through a dynamic offset cancellation that utilizes chopper-stabilization. This method reduces the offset voltage normally caused by device over molding, temperature dependencies, and thermal stress.is special made for low operation voltage, 1.65V , to active the chip which is includes : voltage regulator, Hall voltage generator, small-signal amplifier, chopper stabilization, Schmitt trigger, CMOS output driver. Advanced CMOS wafer fabrication processing is used to take advantage of low-voltage requirements, component matching, very low input-offset errors, and small component geometries. This device requires the presence of omni-polar magnetic fields for operation.The package type is in a Halogen Free version has been verified by third party Lab.Features and Benefits● CMOS Hall IC Technology ● Strong RF noise protection● 1.65 to 3.5V for battery-powered applications● Omni polar, output switches with absolute value of North or South pole from magnet ● Operation down to 1.65V , Micro power consumption ● High Sensitivity for reed switch replacement applications ● Multi Small Size option●Low sensitivity drift in crossing of Temp. range●Ultra Low power consumption at 5uA (Avg) ● High ESD Protection, HBM > ±4KV( min ) ● Totem-pole outputApplications● Solid state switch● Handheld Wireless Handset Awake Switch ( Flip Cell/PHS Phone/Note Book/Flip VideoSet)● Lid close sensor for battery powered devices● Magnet proximity sensor for reed switch replacement in low duty cycle applications ● Water Meter ● Floating Meter ● PDVD ● NBHAL251/ UAC1:10nF C2:100pFAbsolute Maximum Ratings At(Ta=25℃)CharacteristicsValues Unit Supply voltage,(V DD ) 4.5 V Output V oltage,(V out ) 4.5 V Reverse V oltage , (V DD ) (V OUT ) -0.3 V Magnetic flux density UnlimitedGauss Output current,(I OUT )1 mAOperating temperature range, (Ta ) -40 to +85 ℃ Storage temperature range, (Ts ) -65 to +150℃ Maximum Junction Temp,(Tj ) 150℃Thermal Resistance(θJA ) S 310 / 540 / 206 / 543 ℃/W (θJC ) 223 / 390 / 148 / 410 ℃/W Package Power Dissipation, (P D )400 / 230 / 606 / 230mWNote: Exceeding the absolute maximum ratings may cause permanent damage. Exposure to absolute maximum- rated conditions for extended periods may affect device reliability.Electrical SpecificationsDC Operating Parameters :Ta=25℃, V DD =1.8VParametersTest ConditionsMinTypMaxUnitsSupply V oltage,(V DD ) Operating 1.65 3.5 V Supply Current,(I DD ) Awake State 1.4 3 mA Sleep State 3.6 7 μA Average 5 10 μA Output Leakage Current,(I off ) Output off1uA Output High Voltage,(V OH ) I OUT =0.5mA(Source) V DD -0.2V Output Low Voltage,(V OL ) I OUT =0.5mA(Sink) 0.2 V Awake mode time,(T aw ) Operating 40 80 uS Sleep mode time,(T SL ) Operating 40 80 mS Duty Cycle,(D,C )0.1 % Electro-Static DischargeHBM4KVTypical Application circuitVccHAL251T / UAST / UA STE ST/UA UA 2512251E Magnetic SpecificationsDC Operating Parameters :Ta=25℃, V DD =1.8VParameter SymbolTest ConditionsMin. Typ. Max. UnitsOperating Point B OPS S pole to branded side, B > BOP, V out On 30 55 Gauss B OPN N pole to branded side, B > BOP, V out On -55 -30 Gauss Release Point B RPS S pole to branded side, B < BRP, V out Off 10 20 Gauss B RPN N pole to branded side, B < BRP, V out Off-20 -10 Gauss HysteresisB HYS|BOPx - BRPx|10Gauss51ESTMagnetic SpecificationsDC Operating Parameters :Ta=25℃, V DD =1.8VParameter SymbolTest ConditionsMin. Typ. Max. UnitsOperating Point B OPS N pole to branded side, B > BOP, V out On 30 55 Gauss B OPN S pole to branded side, B > BOP, V out On -55 -30 Gauss Release Point B RPS N pole to branded side, B < BRP, V out Off 10 20 Gauss B RPN S pole to branded side, B < BRP, V out Off-20 -10 Gauss HysteresisB HYS|BOPx - BRPx|10GaussOutput Behavior versus Magnetic PolarDC Operating Parameters :Ta = -40 to 85℃, Vdd =1.8V to 3.5VParameterTest conditionOUT(ST)Test conditionOUT(SN)South poleB<Bop[(-55)~(-10)] Low B<Bop[(-55)~(-10)] Low Null or weak magnetic fieldB=0 or B < BRP High B=0 or B < BRP High North poleB>Bop(55~10)LowB>Bop(55~10)LowNorth PoleSouth PoleST PackageUA PackageVsatMagnetic Flux Density in GaussSouth PoleHAL251Performance GraphTypical Supply Voltage(V DD ) Versus Flux DensityTypical Temperature(T A ) Versus Flux DensityTypical Temperature(T A ) Versus Supply Current(I DD )Typical Supply Voltage(V DD ) Versus Supply Current(I DD )Typical Supply Voltage(V DD ) Versus Output Voltage(V DSON )Typical Temperature(T A ) Versus Output Voltage(V DSON )Package Power DissipationThe power dissipation of the Package is a function of the pad size. This can vary from the minimum pad size for soldering to a pad size given for maximum power dissipation. Power dissipation for a surface mount device is determined by T J(max), the maximum rated junction temperature of the die, R θJA , the thermal resistance from the device junction to ambient, and the operating temperature, Ta. Using the values provided on the data sheet for the package, PD can be calculated as follows:aj J(max)D R Ta -T P θ=The values for the equation are found in the maximum ratings table on the data sheet. Substituting these values into the equation for an ambient temperature Ta of 25°C, one can calculate the power dissipation of the device which in this case is 400 milliwatts.400mW C/310C25-C 150(ST)P W D =°°°=The 310℃/W for the ST package assumes the use of the recommended footprint on a glass epoxy printed circuit board to achieve a power dissipation of 400 milliwatts. There are other alternatives to achieving higher power dissipation from the Package. Another alternative would be to use a ceramic substrate or an aluminum core board such as Thermal Clad. Using a board material such as Thermal Clad, an aluminum core board, the power dissipation can be doubled using the same footprint.Sensor Location, package dimension and markingST Package(TSOT-23) Hall Plate Chip Location(Top View) (Bottom view)251XX1230.80Location3NOTES: 1.PINOUT (See Top View at left:) Pin 1 V DD Pin 2 Output Pin 3 GND 2.Controlling dimension: mm;UA Package Hall Chip location 251XXXNOTES:1).Controlling dimension:mm 2).Leads must be free of flash and plating voids 3).Do not bend leads within 1 mm of lead to package interface.4).PINOUT: Pin 1 V DD Pin 2 GND Pin 3 Output Output Pin Assignment(Top view)123V DD GND Out251XXX2.00Location。
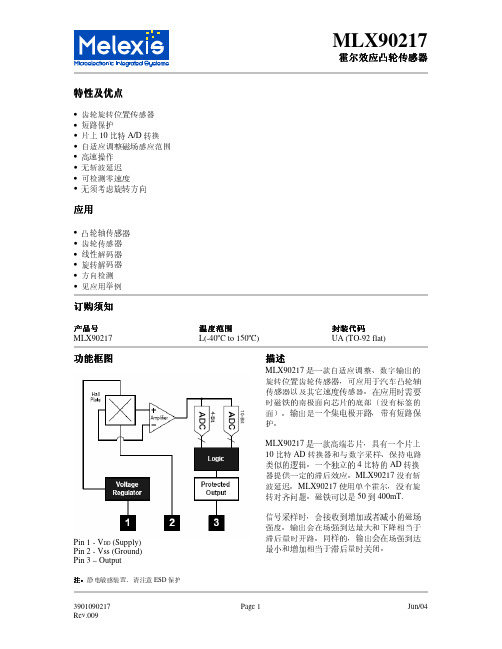
凸轮传感器MLX90217
3901090217 Rev.009
Page 1
Jun/04
MLX90217
霍尔效应凸轮传感器
MLX90217 电气规格
直流工作参数 除非另有说明 TA = -40ºC ~ 150ºC, VDD = 3.5V ~ 24V (
)
参数 符号
测试条件
最小 典型
输输输输输出出出出出供供供输时温漏上下饱短短带电电电出钟度电升降和路路宽电电电电频阻流沿沿压流流流率抗电电关时时压流闭间间
+1 603 223 2362 Email sales_usa@
和 认证 ISO/TS16949 ISO14001
3901090217 Rev.009
Page 8
Jun/04
特性
在时稳芯输定。片出这供才种电会情后改,况变。无在重论场置场强的强为状大零态小时,不被输包观出含测都任到,会何但被场在重强小置的或到信大高息(。场输如强出果时驱供也动电应关端该闭电会)压发生。上只。升有很探慢,测重到置第的一状个态最会小不值 齿一合适轮款的传在环感很氧器大基在场树组强脂装范,后围磁通内“铁常自可需适以要粘应调到调整没整来”有使芯标差片签分,的式不那霍需一尔要面盘。任平何行改于动磁。铁。如然果而使,用腈在基应丙用中烯,酸M酯L粘X合90剂21或7 是者
)Leabharlann 反线偏参性置数范范围围符号
BBIAS
滞后
Bhys
测试条件
Operating
到 VDD=12V
VDD=3.5V 24V
最小 典型 最大 单位
-30
-
400
mT
50
-
500
mT
1.8
3.5
10
mT
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
深圳市粤科源科技有限公司专业供应MLX90251线性霍尔效应传感器,该产品由原厂家生产、供货。
我们拥有稳定的货源。
库存稳定,型号齐全,质量正品保证!MLX90251是一款CMOS技术制造的可编程的线性霍尔效应传感器芯片。
适用于阀门位置传感器、刹车踏板位置传感器、底盘高度测量、电子稳定程序(ESP)、电子辅助转向、变速器、废气循环(EGR)系统阀门位置、燃油液面检测器、燃油液面传感器,等。
比品质、比技术、比价格、比服务、比速度,我们都将是您最可靠的供应商,我们时刻期待着与您的合作!
商品描述
MLX90251拥有动态的误差纠正电路,可以消除与模拟霍尔效应装置有关的偏置误差。
所有MLX90251的特性参数都是可编程的。
静态电压VOQ(当磁场强度为0时的输出电压),敏感度,正负斜率,输出钳位电压,敏感度温度漂移,内部偏置点和低通滤波器对于最终客户来说都是可编程的。
MLX90251的比例输出电压与供电电压成比例关系。
当使用供电电压作为模数转换器的参考电压时,±10%的供电电压变化不会影响精度。
当把芯片的增益设置为某一值时(正极性),输出电压将会随着垂直于芯片表面的南极磁场的增强而上升。
相反的,输出电压会会随着垂直于芯片表面的北极磁场的增强而下降。
在一个宽泛的温度范围内,MLX90251对于敏感度和静态电压有非常稳定的温度补偿。
MLX90251特点和优点
模拟信号处理
四边形可转换的霍尔盘/ 斩波稳定放大器
线性模拟比例输出电压
可调整的磁性敏感度
可调整的低通滤波器
可调整的输出驱动
可调整的钳位电压
可调整的VOQ温度漂移
可调整的线性度温度系数
可调整的内部偏置点。