机械原理课后答案第9章
机械原理习题册答案
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
《机械原理》(于靖军版)第9章习题答案

9-2 在飞机起落架所用的铰链四杆机构中,已知连杆的两位置如题图9-1所示,要求连架杆AB的铰链A 位于B1C1的连线上,连架杆CD的铰链D位于B2C2的连线上。
试设计此四杆机构。
题图9-1解:9-3 用图解法设计一曲柄摇杆机构。
已知两固定铰链点A、D,摇杆位于左极限位置时,对应的连杆位置为M1N1,且M1N1与AD之间的夹角为65︒,过点D的铅垂线为摇杆左右极限位置的对称轴,且摇杆的摆角恰等于极位夹角θ的2倍,并求其行程速比系数K。
(注:M1、N1为连杆AB线上的任意两点,请直接在题图9-2上作图)题图9-2解:B1BC C1θθ2DA由几何关系可知:A点位于以D为圆心,CD杆长为半径的圆上。
因为:AD=DC1可知:︒︒︒=⨯-=∠506521801DA C︒︒︒=-=405090θ所以:571711-180180.==+=︒︒θθK 9-4 试设计一铰链四杆机构。
已知行程速度变化系数K =1,机架长l AD =100mm ,曲柄长l AB =20mm ,且当曲柄与连杆共线,摇杆处于右极限位置时,曲柄与机架的夹角为30︒(题图9-3)。
试用图解法确定摇杆及连杆的长度。
题图9-3解:A B ’B CC ’D O30°如图所示: mm 25l l =='AB AB mm 25l l =='OC OC 50mm l =ODmm 2910l l l 2OD2DC'=+='DC mm 35030l l =⋅=︒cos AD BC9-5 如题图9-4所示,已给出铰链四杆机构的连杆(铰链C 在连杆参考线I 和II 上)和连架杆AB 的两组对应位置,以及固定铰链D 的位置,已知l AB =25mm 。
试:(1) 用图解法设计此铰链四杆机构,并给出连杆BC 的长度和连架杆CD 的长度; (2) 判断连架杆AB 是否可整周转动,并给出理由;(3) 当连架杆AB 为原动件时,在图上标出机构位于AB 1C 1D 位置的传动角。
孙恒机械原理第八版第九章课后答案

孙恒机械原理第八版第九章课后答案
1.若截面积S为恒定,则管道流量Q与流速V之间的关系不是
A.Q∝V
B.Q∝V2
C.Q∝V3
D.Q∝1/V
答案:D
2.几何轴心力的概念不包括
A.额定轴心力
B.最大轴心力
C.均衡轴心力
D.平均轴心力
答案:A
3.一个实心圆柱轴的一端旋转速度为1000 r/min,有效长度为200 mm,则其表面速度是
A.12.6m/s
B.16.7m/s
C.25.1m/s
D.31.4m/s
答案:B
4.同温压工艺中有一窄带阀门,该带阀门间隙h可由
A.温度
B.压力
C.厚度
D.宽度
答案:C
5.下列加工工艺中,不具有金属热处理功能的是
A.热镦
B.热拉深
C.冷镦
D.热穿孔
答案:D
6.等温截面中,流体的含热量是
A.恒定
B.增加
C.减少
D.随流速变化
答案:A
7.若两物体间的摩擦因素μ<1,则这两物体之间的
A.连接松
B.连接紧
C.连接不定
D.连接牢固
答案:B
8.若F1、F2为两台柴油机的轴功率,可以用下列公式表示
A.F1+F2
B.F1-F2
C.F1/F2
D.F1×F2
答案:D
9.曲柄连杆机构中,当有摩擦的时候,转动惯量
A.增加
B.不变
C.减少
D.先增大后减小
答案:B
10.若液压系统的口径和行程不变,则压力
A.增大
B.不变
C.减小
D.相等。
机械课后习题答案第9章习题及解答

第9章习题及解答9.4解:(1)选择链轮齿数z 1、z 2传动比 12720 3.6200n i n === 按表8.13取小链轮齿数z 1=27,大链轮齿数z 2=iz 1,取z 2=97。
(2)求计算功率P C由表8.10查得K A =1.3,计算功率为)(26203.1kW P K P A c =⨯==(3)确定中心距a 0及链节数L p初定中心距0(30~50)a p =,取030a p =由式(8.37)求L p0212210222a p z z z z p a L p ⎪⎭⎫ ⎝⎛-+++=π223027979727126.142230p p p pπ⨯+-⎛⎫=++= ⎪⎝⎭ 取L p =126(4)确定链条型号和节距p首先确定系数K z 、K L 、K p 。
根据链速估计链传动可能产生链板疲劳破坏,由表8.11查得小链轮齿数系数K z =1.46,由图8.28查得K L =1.08。
考虑到传递的功率较大,选则3排链,由表8.12查得K p =2.5 所能传递的额定功率 )(6.65.208.146.1260kW K K K P P p L z c =⨯⨯== 由图8.26选择滚子链型号为12A ,链节距p =19.05mm ,由图证实工作点落在曲线顶点左侧,主要失效形式为链板疲劳,前面假设成立。
(5)验算链速V)/(17.610006072005.192710006011s m pn z v =⨯⨯⨯=⨯= (6)确定链长L 和中心距a链长)(4.2100005.191261000m pL L p =⨯=⨯= 中心距⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛+-+⎪⎭⎫ ⎝⎛+-=2122212128224πz z z z L z z L p a p p=401.4 mm(7)求作用在轴上的力工作拉力 100024.3()P F kN v ==)(2.417.62610001000kN v P F === 因载荷不平稳,取F Q =1.3F =5.48kN(8)选择润滑方式按图8.27选择油浴或飞溅润滑方法。
机械原理课后习题答案部分)

第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
《机械原理》习题答案-CH09
力作用点的速度方向: 沿移动副导路方向。
1) 凸轮从图示位置转过90º 后推杆的位移; 图示位置推杆的位移量S0应 是沿推杆的导路方向(与偏距圆 相切)从基圆开始向外量取。 凸轮从图示位置转过90º 后 推杆的位移等于推杆从图示位 置反转90º 后的位移。 推杆从图示位置反转90º 后 的导路方向仍于与偏距圆相切。 其位移量S1 仍是沿推杆的导路 方向从基圆开始向外量取。 凸轮从图示位置转过90º 后推杆的位移:S=S1 -S0
2)远休2 2 dx / d ( s 0 s ) cos( 2) e sin( 2) 3 3 2 2 dy / d ( s 0 s ) sin( 2) e cos( 2) 3 3
3 [0, / 3] 5 5 5 dx / d (ds / d )sin( 3) ( s 0 s) cos( 3) e sin( 3) 6 6 6 3h 5 5 5 sin(3 3)sin( 3) ( s 0 s)( 3) e sin( 3) 2 6 6 6 5 5 5 dy / d (ds / d )sin( 3) ( s 0 s)sin( 3) e cos( 3) 6 6 6 3h 5 5 5 sin(3 3) cos( 3) ( s 0 s)sin( 3) e cos( 3) 2 6 6 6 4)近休阶段 4 [0,5 / 6] 7 7 dx / d ( s 0 s ) cos( 4) e sin( 4) 6 6 7 7 dy / d ( s 0 s ) sin( 4) e cos( 4) 6 6
1)推程阶段
1 [0, 2 / 3] dx / d (ds / d ) sin 1 ( s 0 s) cos 1 e sin 1 3h { [1 cos(3 1)]}sin 1 ( s 0 s) cos 1 e sin 1 2 dy / d (ds / d ) cos 1 ( s 0 s )( sin 1) e cos 1 3h { [1 cos(3 1)]}cos 1 ( s 0 s ) sin 1 e cos 1 2
机械原理课后答案——第九章 机械的效率和自锁
解:带传动、圆锥齿轮传动、圆柱齿轮传动、工作机A 串联 Pd ' PA /(113 A ) 5 /(0.97 0.97 0.92 0.8) 7.22kW
带传动、圆锥齿轮传动、圆柱齿轮传动、工作机B 串联,故 Pd '' PB /(11 3 B ) 1 /(0.97 0.97 0.92 0.5) 2.31kW 所以电动机所需功率为
设每对齿轮的效率1097包括轴承的效率在内带传动的效率3092工作机ab的功率分别为pa5kwpb1kw效率分别为a08b05试求电动机所需的功率
机械的效率和自锁
习题 5-7
5-7 如图所示,电动机通过V 带传动及圆锥、圆柱齿轮传动 带动工作机A及B。设每对齿轮的效率1=0.97(包括轴承的效 率在内),带传动的效率3 =0.92,工作机A、B的功率分别为 PA=5 kW、PB=1kW,效率分别为A=0.8、B=0.5,试求电动 机所需的功率。
Hale Waihona Puke Pd Pd ' Pd '' 7.22 2.31 9.53kW
机械原理课后全部习题解答
机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理_课后习题答案免费(全面)高教版 西北工大
2) 求vC2
v C 2 = v B + v C 2 B = v C 3 + vC 2 C 3
方向: 大小: ⊥AB
√
⊥BC ?
0 0
∥BC ?
取
μv = 0.005
m/s mm
作速度图
b
题3-10 解(续2)
[解] (2)速度分析
v B → vC 2 → v D , v E → ω 2
1) 求vB 2) 求vC2 3) 求vD 和求vE 用速度影像法
C
E
vC = v B + vCB v D = v B + v DB
(2) 求vE
D p(a, f )
v E = vC + v EC = v D + v ED
b d e c
题3-5 解
b) 解: 顺序 (1) 求vC
v B → vC → v E → v F
D B vB A E G F C
vC = v B + vCB
√
0 0
∥CD ?
b2 (b1) (b3)
其中 a B3B2 = 2ω2 v B3B2 = 0(∵ v B3B2 = 0)
a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
题3-8 c) 解(续2)
[解] (3)加速度分析 a B 2 ( = a B1 ) → a B 3 → a C 3 1) 求aB2 A 1 ω1 2) 求aB3
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
3) 求vC3 : 用速度影像法
v C 3 = 0 同时可求得 ω3 =
机械原理第九章课后答案
(a)(b)
题图2-6
【篇二:机械原理答案重点(课后习题)】
机构,该机构能保持人行走的稳定性。若以颈骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。
解:1)取比例尺,绘制机构运动简图。大腿弯曲90度时的机构运动简图如虚线所示。(如图2-5所示)
机械原理第九章课后答案
【篇一:机械原理习题及解答】
-1如题图2-1所示为一小型冲床,试绘制其机构运动简图,并计算机构自由度。
(a)(b)
题图2-1
解:
1)分析
该小型冲床由菱形构件1、滑块2、拨叉3和圆盘4、连杆5、冲头6等构件组成,其中菱形构件1为原动件,绕固定点a作定轴转动,通过铰链b与滑块2联接,滑块2与拨叉3构成移动副,拨叉3与圆盘4固定在一起为同一个构件且绕c轴转动,圆盘通过铰链与连杆5联接,连杆带动冲头6做往复运动实现冲裁运动。
d) n?6 pl?7ph?3
f?3n?2pl?ph?3?6?2?7?3?1
齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1
个约束。
齿条7与齿轮5的啮合为高副(因中心距未被约束,故应为双侧接触)将提供2个约束。
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号p,,直接标注在图上)
2) n?5 pl?7 ph?0
f?3n?2pl?ph?3?5?2?7?0?1
弯曲90o时的机构运动简图
题2-16试计算如图所示各机构的自由度。图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在d处为铰接在一起的两个滑块);图c为一精压机机构。并问在图d所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课后答案第9章第9章作业,s 9-1 何谓凸轮机构传动中的刚性冲击和柔性冲击?试补全图示各段一、,,v,一、一曲线,并指出哪些地方有刚性冲击,哪些地方有柔性冲击,答凸轮机构传动中的刚性冲击是指理论上无穷大的惯性力瞬问作用到构件上,使构件产生强烈的冲击;而柔性冲击是指理论上有限大的惯性力瞬间作用到构件上,使构件产生的冲击。
s-δ, v-δ, a-δ曲线见图。
在图9-1中B,C处有刚性冲击,在0,A,D,E处有柔性冲击。
9—2何谓凸轮工作廓线的变尖现象和推杆运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免?答在用包络的方法确定凸轮的工作廓线时,凸轮的工作廓线出现尖点的现象称为变尖现象:凸轮的工作廓线使推杆不能实现预期的运动规律的现象件为失真现象。
变尖的工作廓线极易磨损,使推杆运动失真(使推杆运动规律达不到设计要求,因此应设法避免。
变尖和失真现象可通过增大凸轮的基圆半径(减小滚子半径以及修改推杆的运动规律等方法来避免。
s,0,/32,/3,4,/35,/32,v,a,题9-1图9—3力封闭与几何封闭凸轮机构的许用压力角的确定是否一样?为什么? 答力封闭与几何封闭凸轮机沟的许用压力角的确定是不一样的。
因为在回程阶段-对于力封闭的凸轮饥构,由于这时使推杆运动的不是凸轮对推杆的作用力F,而是推杆所受的封闭力(其不存在自锁的同题,故允许采用较大的压力角。
但为使推秆与凸轮之间的作用力不致过大。
也需限定较大的许用压力角。
而对于几何形状封闭的凸轮机构,则需要考虑自锁的问题。
许用压力角相对就小一些。
9—4一滚子推杆盘形凸轮机构,在使用中发现推杆滚子的直径偏小,欲改用较大的滚子,问是否可行?为什么?答不可行。
因为滚子半径增大后。
凸轮的理论廓线改变了(推杆的运动规律也势必发生变化。
9—5一对心直动推杆盘形凸轮机构,在使用中发现推程压力角稍偏大,拟采用推杆偏置的办法来改善,问是否可行?为什么?答不可行。
因为推杆偏置的大小、方向的改变会直接影响推杆的运动规律(而原凸轮机构推杆的运动规律应该是不允许擅自改动的。
-6 在图示机构中,哪个是正偏置?哪个是负偏置?根据式(9-24)说明偏置方向对凸轮机 9构压力角有何影响?答由凸轮的回转中心作推杆轴线的垂线(得垂足点,若凸轮在垂足点的速度沿推杆的推程方向(刚凸轮机构为正偏置(反之为负偏置。
由此可知(在图示机沟中,两个均为正偏置。
由dsde/,,tan,22,,()res0可知(在其他条件不变的情况下。
若为正偏置(e前取减号)(由于推程时(ds/dδ)为正(式中分子ds/dδ-e<ds/dδ, 故压力角α减小。
而回程时, 由于ds,dδ为负, 式中分子为|(ds,dδ)-e|=| (ds,dδ) |+ |e| >ds,dδ。
故压力角增大。
负偏置时刚相反,即正偏置会使推程压力角减小,回程压力角增大;负偏置会使推程压力角增大,回程压力角减小。
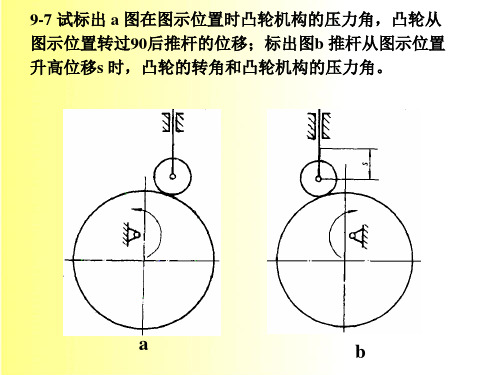
9—7 试标出题9—6a图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90º后推杆的位移;并标出题9—6b图推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。
解如图 (a)所示,用直线连接圆盘凸轮圆心A和滚子中心B,则直线AB与推杆导路之间所夹的锐角为图示位置时凸轮机构的压力角。
以A为圆心, AB为半径作圆, 得凸轮的理论廓线圆。
连接A与凸轮的转动中心O并延长,交于凸轮的理论廓线于C点。
以O为圆心(以OC 为半径作圆得凸轮的基圆。
以O为圆心, 以O点到推杆导路的距离OD为半径作圆得推杆的偏距圆;。
延长推杆导路线交基圆于G-点,以直线连接OG。
过O点作OG 的垂线,交基圆于E点。
过E点在偏距圆的下侧作切线(切点为H点(交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移s。
方法同前,在图 (b)中分别作出凸轮的理论廓线、基圆、推杆的偏距圆。
延长推杆导路线交基圆于G点,以直线连接OG。
以O为圆心,以滚子中心升高s后滚子的转动中心K到O点的距离OK为半径作圆弧,交理论廓线于 F点。
过F点作偏距圆的切线,交基圆于E点,切点为H。
则?GOE为推杆从图示位置升高位移s时-凸轮的转角,?AFH为此时凸轮机构的压力角。
(a) (b)9—8在图示凸轮机构中,圆弧底摆动推杆与凸轮在B点接触。
当凸轮从图示位置逆时针转过90。
时,试用图解法标出:1)推杆在凸轮上的接触点;2)摆杆位移角的大小;3)凸轮机构的压力角。
解如图所示,以O为圆心,以O点到推杆转动中心A的距离AO为半径作圆,得推杆转动中心反转位置圆。
过O点怍OA的垂线,交推杆转动中心反转位置圆于D点。
以O`为圆心(以O`点到推杆圆弧圆心C的距离CO’为半径作圆(得凸轮的理论廓线。
以O为圆心,作圆内切于凸轮的理论廓线圆,得凸轮的基圆。
以D为圆心,以AC为半径作圆弧,交凸轮的理论廓线于E点,交凸轮的圆于G 点。
用直线连接EO’,交凸轮的实际廓线于F点,此即为推杆在凸轮上的接触点;而?GDE即为摆杆的位移角;过E点并垂直于DE的直线与直线EF间所夹的锐角即为此时凸轮机构的压力角。
,::0~150, 9—9 已知凸轮角速度为1(5 rad,s,凸轮转角时,推杆等速上升16mm; ,::150~180,,::180~300,,::300~360,时推杆远休,时推杆下降16mm;时推杆近休。
试选择合适的推杆推程运动规律,以实现其最大加速度值最小,并画出其运动线图。
解推杆在推程及回程段运动规律的位移方程为:(1)推程:s=hδ,δ 0º?δ?1 50º 02(2)回程:等加速段s=h一2hδ2,δ` 0º?δ?60º 022 等减速段s=2h(δ’一δ),δ` 60º?δ?120º 0计算各分点的位移值如表9(3:根据表9-3可作所求图如下图:9—10设计一凸轮机构,凸轮转动一周时间为2 s。
凸轮的推程运动角为60º,回程运动角为150。
,近休止运动角为150º。
推杆的行程为15 mm。
试选择合适的推杆升程和回程的运动规律,使得其最大速度值最小,并画出运动线图。
9一11试设计一对心直动滚子推杆盘形凸轮机构,滚子半径r,=10 mm,凸轮以等角速度逆时针回转。
凸轮转角δ=0º,120º时,推杆等速上升20mm;δ=120º,180º时,推杆远休止;δ=180º,270º时,推杆等加速等减速下降20 mm;δ=270º,:360º时,推杆近休止。
要求推程的最大压力角α。
?30º,试选取合适的基圆半径,并绘制凸轮的廓线。
问此凸轮机构是否有缺陷,应如何补救。
9一12试设计一个对心平底直动推杆盘形凸轮机构凸轮的轮廓曲线。
设已知凸轮基圆半径rn=30 mm,推杆平底与导轨的中心线垂直,凸轮顺时针方向等速转动。
当凸轮转过120~1~r推杆以余弦加速度运动上升20。
,再转过150º时,推杆又以余弦加速度运动回到原位,凸轮转过其余90º时,推杆静止不动。
问这种凸轮机构压力角的变化规律如何?是否也存在自锁问题?若有,应如何避免?解推杆在推程及回程运动规律的位移方程为(1)推程S=h[1-cos(πδ/δ)]/2: 0º?δ?120º 0(2)回程(S=h[1+cos(πδ/δ0`)]/2 0º?δ?1 50º计算各分点的位移值如表9-4l:根据表9-4可作所求图如下图:这种凸轮机构的压力角为一定值,它恒等于平底与导路所夹锐角的余角(与其他因素无关。
这种凸轮机构也会是存在自锁问题,为了避免自锁(在设计时应该在结构许可的条件下,尽可能取较大的推杆导路导轨的长度。
并尽可能减小推gan 9的悬臂尺寸。
9一13 一摆动滚子推杆盘形凸轮机构(参看图9—23),已知lOA=60 mmr0=25 mm,lAB=50 mm,rr=8 mm。
凸轮顺时针方向等速转动,要求当凸轮转过180º时,推杆以余弦加速度运动向上摆动25º;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。
试以作图法设计凸轮的工作廓线。
解推扦在推程及回程段运动规律的位移方程为(1)推程:s=Φ[1-cos(πδ/δ)/2 0º?δ?180º 0(2)回程:s=Φ[1-(δ/δ`)十sin(2πδ/δ`)]/(2π) oº?δ?180º 00计算各分点的位移值如表9(5:根据表9。
5作图如图所示9—14试设计偏置直动滚子推杆盘形凸轮机构凸轮的理论轮廓曲线和工作廓线。
已知凸轮轴置于推杆轴线右侧,偏距e=20 mm,基圆半径r。
=50 mm,滚子半径r,=10 mm。
凸轮以等角速度沿顺时针方向回转,在凸轮转过角占,:120。
的过程中,推杆按正弦加速度运动规律上升矗=50 mm;凸轮继续转过炙=30。
时,推杆保持不动;其后,凸轮再回转角度如=60时,推杆又按余弦加速度运动规律下降至起始位置;凸轮转过一周的其余角度时,推杆又静止不动。
解 (1)汁算推杆的位移并对凸轮转角求导:当凸轮转角δ在o?δ?2π,3过程中,推杆按正弦加速度运动规律上升h=50 rnm。
则,,,12,,sh[sin()]2,,,00,,,1233,,,,sh[sin()]50[cos(3)],222,,,,,00可得0?δ?2π/3ds11233,,,,,,h[cos()]50[cos(3)],d22,,,,,,111 0?δ?2π/3当凸轮转角占在2π,3?δ?5π,6过程中,推杆远休。
S=50 ,2π,3?δ?5π,6ds/dδ=0,2π/3?δ?5π,6当凸轮转角δ在5π/6?δ?7π,6过程中,推杆又按余弦加速度运动规律下降至起始位置。
则h,,s,,[1cos(0]`2,0可得,,,,(),,h505,12s,,,,,{1cos[]}{1cos[3()]},226,3 5π,6?δ?7π,6,,,,(),,dsh,,5512,,,,,,sin[]3sin[3()],d226,,,33 5π,6?δ?7π,6 当凸轮转角δ在7π/6?δ?2π过程中,推杆近休。
S=0 7π,6?δ?2πds/ dδ=0 7π?δ?2π(2)计算凸轮的理论廓线和实际廓线: i本题的计算简图如图(a)所示。
选取坐标系如图 (b)所示,由图(b)可知,凸轮理论廓线上B点(即滚子中心)的直角坐标为 :x=(s+s)cosδ-esinδ 0y=(s+s)sinδ+ecosδ 021/2221/22式中:s=(r-e)=(50-20)=45.826mm 00 由图 (b)可知凸轮实际廓线的方程即B’点的坐标方程式为 ix`=x-rcosθ rY`=y-rsinθ r因为dy/dδ=(ds/dδ-e)sinδ+(s+s)cosδ 0dx/dδ=(ds/dδ-e)cosδ-(s-s)sinδ 0dxds/sin,,,22,(/)(/)dxddyd,,dyds/,cos,22,(/)(/)dxddyd,,所以故 x`=x-10cosθy`=y-10sinθ由上述公式可得理论轮廓曲线和工作廓线的直角坐标(计算结果如表9(6 凸轮廓线如下图昕示。