线元法
线元法
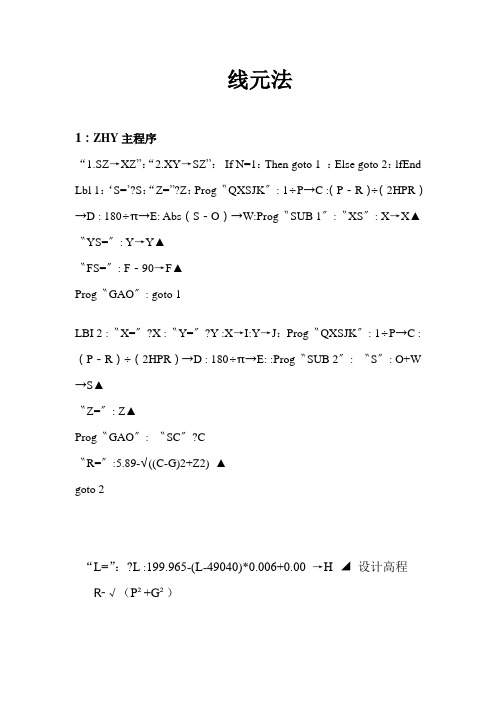
线元法1:ZHY主程序“1.SZ→XZ”:“2.XY→SZ”:If N=1:Then goto 1 :Else goto 2:lfEnd Lbl 1:‘S=’?S:“Z=”?Z:Prog〝QXSJK〞: 1÷P→C :(P-R)÷(2HPR)→D : 180÷π→E: Abs(S-O)→W:Prog〝SUB 1〞:〝XS〞: X→X ▲〝YS=〞: Y→Y▲〝FS=〞: F-90→F▲Prog〝GAO〞: goto 1LBI 2 :〝X=〞?X :〝Y=〞?Y :X→I:Y→J:Prog〝QXSJK〞: 1÷P→C :(P-R)÷(2HPR)→D : 180÷π→E: :Prog〝SUB 2〞: 〝S〞: O+W →S▲〝Z=〞: Z▲Prog〝GAO〞:〝SC〞?C〝R=〞:5.89-√((C-G)2+Z2) ▲goto 2“L=”:?L :199.965-(L-49040)*0.006+0.00 →H ◢设计高程R-√(P²+G²)2:SUB1(缓和曲线正算子程序,不能独立运行)0.1739274226→A : 0.3260725774→B : 0.0694318442→K : 0.3300094782→L : 1-L→F : 1-K→M : U+W(A Cos(G+QEKW (C+KWD))+B Cos(G+QELW(C+LWD))+ B Cos(G+QEFW (C+FWD))+A Cos(G+QEMW(C+MWD)))→X :V+W(A Sin (G+QEKW(C+KWD))+B Sin(G+QELW(C+LWD))+ B Sin (G+QEFW(C+FWD))+A Sin(G+QEMW(C+MWD)))→Y : G+QEW (C+WD)+90→F : X+Z cos(F)→X : Y+Z Sin(F)→Y3 : SUN 2(缓和曲线反算子程序,不能独立运行)G-90→T : Abs((Y-V)Cos(T)-(X-U)Sin(T))→W : 0→Z : LBI 0 : Prog〝SUB 1〞: T+QEW(C+WD)→L :(J-Y)Cos(L)-(I-X)Sin (L)→Z : If Abs(Z)< 1×10-6 : Then Goto 1 : ELse W+Z→W : Goto 0 : IfendLBI 1 : 0→Z : Prog〝SUB 1〞:(J-Y)÷Sin(F)→Z4 : QX SJK (缓和曲线数据库子程序,不能独立运行)If S≥7000 And S<8552.052 : Then 39351.594→U : 72418.7097→V : 7000→O :257.8746719→G : 2000→H : 1×1045→P : 1×1045→R : 0→Q : ELse If S≥8552.052 And S<8752.052 : Then 39025.584→U : 70901.283→V : 8552.052→O: 257.8746719→G : 200→H : 1×1045→P : 1800→R : 1→Q : ELse If S≥8752.052 And S<9900.413 : Then 38987.2071→U : 70705.0275→V : 8752.052→O : 261.0577708→G : 1148.361→H : 1800→P : 1800→R : 1→Q : ELse If S≥9900.413 : Then 39170.3263→U : 69590.9925→V : 9900.413→O : 297.6112367→G : 200→H : 1800→P : 1×1045→R : 1→Q : Ifend : Ifend : Ifend : Ifend : Return注意:0 : 表示零。
线元法线路坐标正反算程序

经苦心钻研,奋战多日,终于编写出了代码短,速度快,精度高, 功能全的线路坐标正反算程序,欢迎试用并提出宝贵意见。
功能简介及特点:1、选用高斯-勒让德公式作计算内核,保证精度,模块化设计,便于扩充功能。
2、线元数据可自动从数据库调用,也可手工输入。
3、可管理多条线路,如里程不在线路或线元范围,将警告里程偏大、偏小。
4、边桩计算设计为导线式递推方式,可用于由一个中桩推出结构物所有角点坐标。
5、反算实现了智能化操作,只需输入线路号(或手工输线元资料)坐标,不需近似里程,即可自动从起点向后开始试算出里程、位置,如对算出里程、位置表示怀疑,还可以让计算器从终点起再向前试算下一个可能的位置(匝道、回头曲线同一坐标可能会有一个以上结果)。
第三次及以后试算才要求输入近似里程。
6、程序代码规范简洁,便于阅读、理解。
完整程序清单:ZFS %正反算主程序B=.1739274226:C=.5-B:Lbl 1:U"0 ZS 1 FS"=0=>Prog "ZS":工>U=1=>Prog"FS":工>Goto 1ZS %正算子程序{K}:Prog"ZZ":l=0:{l}:l"L" 丰 0=>"Prog"WY":丰 >Prog"ZB"FS %反算子程序{KVW}:V"XC"W" YC":Lbl 2:Prog "ZZ":I=V-S:J=W-T:Pol(I,J: J=J~F:K二K+Rec(l,J:Absl<1m=>Prog"WZ": 半 >Gota\2M=O:{M}:M"O NEXT"=O二>U=U+1:Goto 2: 半 >U=1ZZ %高斯法中桩子程序(4节点)Prog"XL":M=K-L: O=(P-R) 2PQR:D=.0694318442:E=.3300094782:F=1:G=1-E:H=1-D:l=5:Lbl 1:C[l]=A+MrC[l](1 P+OMC[l]:Dsz l:Goto 1:S=X+M(BcosD+CcosE+CcosG+BcosH:T=Y+M(Bsi nD+Csi nE+Csi nG+Bsi nHWY %外移点计算子程序Lbl 1:J=90:{J}:J=F+J"<":F=J:S=S+Rec(l,J:T=T+J: Prog"ZB":l=0:{l}:l"L" 工0=>Goto 1WZ %位置显示子程序"KJ":K:Pause 1:J丄ZB %坐标显示子程序"XY ":S:Pause 1:T AYC %异常处理子程序U=1=>K=L:U=2 △U=3=>K=M:U=4AU=5=>{K}:U=4 △K<L=>"V<!":Z=1△K>M=>">>!":Z=1DL %断链处理子程序"DL":K=L:I>0=>K=L+Q------------------ 以上为程序运算部分,以下为数据库部分XL %线路数据库选择子程序Lbl 1:Z=0:N"0 SD"=0=>Prog"0" △N=1=>Prog"1" △N=2=>Prog"2" △有几条线路仿上行格式输几行Z=1=>{NLX YOPQRK}:Goto 10 %手工输入子程序L"K0"X YAQ"LS"P"R0"R"RN":M二L+Q:Prog" YC"1 %线路一数据库子程序①Lbl B:L=线路起点里程:M=线路终点里程:Prog"YC":Z=1=>Goto E △②Q=线元长:P=起点半径:R=终点半径:K< L+Q二>X=起点X坐标:Y二起点Y坐标:A=起点方位角:Goto E △ L=L+Q:③…… @Q=短链长:K<L+Q=>Prog "DL":Goto B △ L=L+Q:⑤Q=线元长:P=起点半径:R=终点半径:K<L+Q二>X=起点X坐标:Y二起点Y坐标:A=起点方位角:Goto E △ L=L+Q:⑥……炉0=线元长:P=起点半径:R=终点半径:X=起点X坐标:丫二起点Y坐标:A=起点方位角丄bl E2 %线路二数据库子程序输入要求和线路一相同。
线元法路线计算程序
线元法路线计算程序线元法(LE法)是一种用于计算电力系统潮流分布的方法,它将电力系统抽象成节点和支路的网络,通过对节点和支路进行编号,可以建立节点电压和潮流分布之间的方程,进而求解电力系统中各节点的电压和潮流分布。
下面是一个用于计算线元法路线的程序。
1.定义节点和支路:首先,我们需要对电力系统的节点和支路进行定义。
节点可以是发电站、变电站或负荷节点;支路可以是输电线路或变压器。
每个节点和支路都需要有一个唯一的编号,以便在后续的计算中进行引用。
2.建立节点电压方程:根据电力系统的KCL(电流平衡方程),我们可以得到节点电压方程。
每个节点的电压方程可以表示为:V(i) = Σ{(V(j) - V(i)) / Z(ij)},其中V(i)表示第i个节点的电压,V(j)表示第j个节点的电压,Z(ij)表示第i个节点到第j个节点的支路阻抗。
3.建立支路潮流方程:根据每个支路的电流平衡方程,我们可以得到支路潮流方程。
每个支路的潮流方程可以表示为:I(ij) = (V(i) - V(j)) / Z(ij),其中I(ij)表示从第i个节点到第j个节点的支路电流,V(i)表示第i个节点的电压,V(j)表示第j个节点的电压,Z(ij)表示第i个节点到第j个节点的支路阻抗。
4.解线性方程组:将节点电压方程和支路潮流方程组合成一个线性方程组,我们可以通过求解线性方程组,得到电力系统中各节点的电压和潮流分布。
5.输出结果:根据求解的节点电压和支路潮流,我们可以将结果输出,以便进行分析和评估。
下面是一个基本的线元法路线计算程序的伪代码示例:```Input: 节点和支路的定义,节点电压和支路阻抗的初始值Output: 节点电压和支路潮流的计算结果1.建立节点电压方程和支路潮流方程-初始化节点电压和支路潮流的初始值-根据节点电压方程和支路潮流方程2.解线性方程组-使用数值计算方法求解线性方程组,得到节点电压和支路潮流的计算结果3.输出结果-将节点电压和支路潮流的计算结果输出,以便进行分析和评估```这是一个简化的线元法路线计算程序的框架,具体实现时需要根据具体的电力系统结构和算法细节进行调整和优化。
交点法线元法坐标计算

交点法线元法坐标计算交点法和线元法是计算坐标的两种方法,可以用于计算几何图形中的交点和线段的起始点和终止点的坐标。
下面将详细介绍交点法和线元法的计算过程。
交点法是通过已知条件计算出切线的方程,然后求解出两条切线的交点的坐标。
具体步骤如下:1.根据已知条件,建立两条直线的方程。
假设两条直线的方程分别为L1和L22.将L1和L2相减,得到方程L1-L2=0。
这个方程表示两条直线的交点。
3.解方程L1-L2=0,求出交点的坐标。
这可以通过代入法、消元法或者数值计算方法等得到。
交点法计算坐标的优点是可以得到精确的坐标值。
但是对于复杂的几何图形,方程求解过程可能较为繁琐,需要一定的数学知识和计算能力。
线元法是通过将线段拆分为多个小线元,然后根据已知条件和几何关系逐个计算得到各个小线元的坐标。
具体步骤如下:1. 先计算出线段的长度。
假设线段的起始点和终止点的坐标分别为(x1, y1)和(x2, y2),则线段的长度为L = sqrt((x2 - x1)^2 + (y2 - y1)^2)。
2.根据已知条件和几何关系,将线段等分为若干小线元。
每个小线元的长度为L/n,其中n表示需要等分的线元数目。
3.通过线段的起始点和终止点的坐标,以及小线元的长度计算出每个小线元的起始点和终止点的坐标。
计算公式为:起始点坐标为(x1+i*Δx,y1+i*Δy),终止点坐标为(x1+(i+1)*Δx,y1+(i+1)*Δy),其中i表示第i个小线元,Δx=(x2-x1)/n,Δy=(y2-y1)/n。
线元法计算坐标的优点是计算过程相对简单直观,并且可以得到较为精确的近似值。
但是对于曲线等复杂几何图形,需要将线段等分为较多的小线元才能得到较为准确的坐标值。
无论使用交点法还是线元法计算坐标,都需要根据几何图形的特点和已知条件选择适应的方法,并进行准确的推导和计算。
实际应用过程中,根据具体情况选择合适的计算方法会更加便捷和精确。
线元法简介
线元法万能曲线正反算简介我的线元法是把线形分为直线和曲线,直线就不用说了,起止点桩号,坐标和方位角就可以算了;曲线最基本的组合:是由一段缓和曲线+一段圆曲线组成,任意复杂的曲线都可以分解成缓和曲线+圆曲线或者其中之一就可以。
分析最复杂的曲线可以看到:一般复杂线形由Ls1 ,R1,Ls2, R2组成,相邻的Ls1+R1,一般满足A*A=Ls1*R1,这就是一个线元法单元,即使不满足也可以作为一个线元:当Ls1= Ls2,且R1= R2时,为单曲线当Ls1≠ Ls2,或者R1≠R2时,为复合曲线当Ls1= Ls2=0时,线性为圆曲线,当圆曲线长度为0时,线性为缓和曲线+缓和曲线,当A*A≠Ls1*R1时,为卵形曲线,需要计算虚拟起点坐标综合以上线形,本程序正反算计算全部可以处理。
结合目前流行的线元法,本程序也可以,分为缓和曲线和圆曲线录入,方法是一样的,所不同的是起点要注意,复杂曲线,是两边向中间定义数据库,缓和曲线永远是ZH点或HZ点为起点。
曲线要素说明(有9个):1、起点桩号:(一般为ZH点或HZ点,或ZY点或YZ点,或者卵形公切点GQ)2~3、起点坐标:(X,Y)4、起点方位角:FWJ 114°15′24.33″写成:114.1524335、线性特征:直线,左偏,右偏;三个选一个6、终点桩号:如果起点为ZH点,终点一边为YH点,QZ点,HY点,都可以,一般为YH点,缓和曲线+圆曲线。
如果缓和曲线Ls=0,就是YZ点;大小不一定按路线顺序,如果起点为HZ点,终点根据缓和曲线+圆曲线的特点,和上个线元对接上就可以了。
7、缓和曲线长度Ls:8、圆曲线半径R:9、回旋参数A: 一般满足A*A=Ls1*R1,不满足条件的是卵形曲线。
可以处理任意数量断链。
操作流程:1、先编辑线元数据,保存后推出。
2、如果有线元断链的输以下线元断链数据3、打开线元万能曲线计算单点计算就可以了。
目前,已有一个例子文件在里面,在安装文件目录下“ \dmfx4.0\demo\左线”,有个CAD文件,里面有校核数据,可以看到本软件处理的逐桩表和要素表,可以验证软件的数据,任意数据坐标反算可以得到桩号和距中,任意输入桩号和距中可以正算得坐标。
线元法任意线型坐标计算

边桩பைடு நூலகம்
N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
坐标计算表
中桩
方位角 #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? 偏距 (m) -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 夹角 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90
备注
公司: 项目:
计算里程 (m)
K209+580.000 K209+600.000 K209+620.000 K209+640.000 K209+660.000 K209+680.000 K209+700.000 K209+720.000 K209+740.000 K209+760.000 K209+780.000 K209+800.000 K209+820.000 K209+840.000 K209+860.000 K209+880.000 K209+900.000 K209+920.000 K209+940.000 K209+960.000 K209+980.000 K210+000.000 N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
交点法和线元法的误差分析方法
交点法和线元法的误差分析方法交点法和线元法是两种常用的误差分析方法,用于测量和计算物体的几何特性。
本文将介绍这两种方法的基本原理和应用。
一、交点法交点法是一种通过测量物体表面上的交点来确定其几何特性的方法。
该方法基于以下原理:在三维空间中,任意两个平面的交线称为交点。
通过测量交点的坐标,可以计算出物体在空间中的位置、距离和角度等信息。
使用交点法进行误差分析时,需要先确定测量的目标和指标。
然后,通过使用合适的测量设备,测量出物体表面上的交点坐标。
接下来,通过计算交点坐标的误差,可以得出测量结果的准确性和精度。
最后,根据测量结果的误差值,进行误差分析和评估。
交点法适用于需要测量物体位置、形状和相对位置关系的情况,例如建筑物的测量、零件的装配和机器人的定位等。
通过使用交点法,可以提高测量的精确度和可靠性。
二、线元法线元法是一种基于物理模型的误差分析方法,通过计算物体表面上每个线元的误差来评估整体的误差。
该方法基于以下原理:将物体表面划分成许多小线元,通过对每个线元的测量和分析,得出整体的几何特性。
使用线元法进行误差分析时,需要先确定物体表面的小线元数量和位置。
然后,通过测量每个线元的尺寸和形状,计算出其误差值。
接下来,将每个线元的误差值累加,得出整体的误差。
最后,根据整体的误差值,进行误差分析和评估。
线元法适用于需要分析复杂物体或特定区域的几何特性的情况,例如汽车外壳的造型、航空发动机的叶片设计和电子设备的尺寸控制等。
通过使用线元法,可以更加精确地评估物体的几何特性和误差情况。
综上所述,交点法和线元法是两种常用的误差分析方法,可以用于测量和计算物体的几何特性。
根据具体的测量需求和物体特点,选择合适的方法进行误差分析,可以提高测量结果的准确性和可靠性。
道路设计 线元法
道路设计线元法
道路设计中,线元法是一种常用的设计方法。
它是基于道路中心线的连续直线和曲线段组成的,其中曲线段由圆弧和无限接近于直线的曲线组成。
通过线元法,可以确定道路的横断面形态和纵断面曲线形态。
在线元法中,道路中心线被分割成一段一段的线元,每个线元的长度可以根据实际需要灵活地设定。
然后,根据每个线元的设计速度和曲率半径,确定每个线元的横断面形态和纵断面曲线形态。
最终,通过将每个线元的横断面和纵断面组合起来,得到整个道路的设计方案。
线元法在道路设计中应用广泛,它可以提高设计效率,同时也可以充分考虑道路的安全性和舒适性。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5800 计算程序 (线元法)
主程序 QXJS
Fix 3:Deg:Lbl 4:“1.SZ=>XY”:“2.XY=>SZ”:? Q
Lbl 4: “LICHENG= ” ?S:Prog“SUB0” ↙
Lbl 0:If Q=1:Then Goto1:IfEnd
IfQ=2:ThenGoto2:IfEnd ↙
Lbl 1:”-B,0,B=”? Z: “J J右交角=”?G:Prog“SUB1”: Fix 4:Cls
“X=”:N →N ◢“X=”: Locate3,1,N◢
“Y=”:E→E ◢ “Y=”: Locate3,1,E◢
Prog“JI”:Goto4
“QXFWJ=”:F →F:F ▲ DMS ◢
Goto4 ↙
Lbl 2: “X=”? B: “Y=”? C:B→N: C→E:Prog“SUB2”: “LICHENG=”:S◢ “OUT JL=”:Z◢
Goto4 ↙
说明:
Q: 代表正反算,其中 1 为正算, 2 为反算; S: 代表里程; Z :代表偏移距离; G :代表偏移角度(以线路前进方向为 X 方向,顺时针转为正; N : X 坐标; E : Y 坐标; F :切线方位角;
JI
Clstat
Pol(N-G,-E-H):Cls
If S<0:Then J+360→Y:Ease J→Y:Ifend
“F W J=”:Y▲ DMS ◢黄色为计算机程序
SUB0 ( 数据库 )
Goto1 ↙
Lbl 1
IF S<157687.528:THEN
2884169.2517→U:471475.6573→V:157547.528→O:98 ° 32 ′ 43.08 ″
→A:140→L:10^45→P:10000→R: Return:IfEnd ↙
IF S<163781.879:THEN
2883008.7030→U:477458.2815→V:163641.879→O:101 ° 6 ′ 4.08 ″
→A:140→L:10^45→P:10000→R: Return:IfEnd ↙
IF S<164195.661:THEN
2882981.4268→U:477595.5984→V:163781.879→O:101 ° 30 ′ 7.93 ″
→A:413.7833→L:10000→P:10000→R: Return:IfEnd ↙
IF S<164335.661:THEN
2882890.5519→U:477999.2492→V:164195.6623→O:103 ° 52 ′ 22.82 ″ →A:140→L:10000→P:10^45→R: Return:IfEnd ↙
IF S<171831.142:THEN
2882856.3502→U:478135.0069→V:164335.6623→O:104 ° 16 ′ 26.67 ″ 说明: S :里程;157547.528→O 为线元终点里程;2884169.2517→U 为线元起点 X 坐标;471475.6573→V 为线元起点 Y 坐标;98 ° 32 ′ 43.08 ″ →A 线元起点切线方位角;0^45→P 线元起点半径(左转为负右转为正);10000→R 线元终点半径(左转为负右转为正)
SUB1 正算子程序
0.5 (1÷R-1÷P)÷L→D:S-O→X ↙
U+∫(cos(A+(X÷P+DX2)×180÷π,0,X)→N ↙
V+∫( sin(A+(X÷P+DX2)×180÷π,0,X)→E ↙
A+(X÷P+DX2)×180÷π→F ↙
N+Zcos(F+G) →N:E+Zsin(F+G) →E
Return
SUB2 反算子程序
Lbl 1:0→Z :1→Q :Prog“SUB0”: 0.5 (1÷R-1÷P )÷L→D:S-O→X ↙ U+∫(cos(A+(X÷P+DX2)×180÷π,0,X)→N ↙
V+∫( sin(A+(X÷P+DX2)×180÷π,0,X)→E ↙
A+(X÷P+DX2)×180÷π→F ↙
N+Zcos(F+90) →N:E+Zsin(F+90) →E :
Pol(N-B+10^(-46), E-C+10^(-46)):Isin(F-90-J) →W:S+W→S ↙
IfAbs(W)>0.0001 :Then Goto1:IfEnd ↙
Lbl 2: 0→Z :Prog“QXJSSUB1”:(C-E) ÷sin(F+90) →Z
Return
H (高程主程序)
Fix 3 :Lb1 3: ” LICHENG= ” ?Z: Prog“SQXZL”:(P-Q) ÷ Abs(P-Q) →W ↙
If Z<(H-T):Then(H-Z) × P →X:Goto 2:IfEnd ↙
If Z ≥ (H-T) And Z<H:Then (H-Z) × P+(Z-H+T)2÷ (2WR) →X:Else (H+T-Z)2÷ (2WR)-(Z-H) × Q→X: Goto 2:IfEnd ↙
Lb1 2: ” GAO CHENG= ” D-X →X ◢
Goto 3
SQXZL (竖曲线数据库)
Goto 1
Lb1 1
If Z ≤ 157893.75:Then
25000→R:93.75→T:157800→H:421.977→D:-0.0045→P:0.003→Q:Return:IfE nd ↙
If Z ≤ 159000:Then
25000→R:150→T:158850→H:425.127→D:0.003→P:0.015→Q:Return:IfEnd ↙
If Z ≤ 165017.5:Then
25000→R:117.5→T:164900→H:515.877→D:0.015→P:0.0056→Q:Return:IfEn d ↙
If Z ≤ 168207.5:Then
25000→R:107.5→T:168100→H:533.797→D:0.0056→P:-0.003→Q:Return:IfE nd ↙
If Z ≤ 172175:Then 25000→R:75→T:172100→H:521.797→D:-0.003→P: 0.003→Q:Return:IfEnd ↙
说明: 157893.75 代表竖曲线终点里程,25000→R 代表竖曲线半径;93.75→T 代表竖曲线切长;421.977→D 代表边坡点标高(未改正之前); -0.0045→P 代表前段坡度,上坡为正,下坡为负;0.003→Q 代表后段坡度,上坡为正,下坡为负;。