直流无刷电机硬件设计
无刷直流电机控制系统设计与实现
无刷直流电机控制系统设计与实现一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效率、低噪音、长寿命等优点,在电动工具、航空航天、汽车电子、家用电器等多个领域得到了广泛应用。
然而,要实现无刷直流电机的高效、稳定运行,离不开先进且可靠的控制系统。
本文旨在对无刷直流电机控制系统的设计与实现进行深入探讨,分析控制策略、硬件构成和软件编程,并结合实例,详细阐述控制系统在实际应用中的表现与优化方向。
通过本文的研究,希望能够为相关领域的学者和工程师提供有价值的参考,推动无刷直流电机控制系统技术的进一步发展和应用。
二、无刷直流电机基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器代替传统机械换向器的直流电机。
其基本工作原理与传统的直流电机相似,即利用磁场与电流之间的相互作用产生转矩,从而实现电机的旋转。
但与传统直流电机不同的是,无刷直流电机在结构上取消了碳刷和换向器,采用电子换向技术,通过电子控制器对电机内部的绕组进行通电控制,从而实现电机的旋转。
无刷直流电机通常由定子、转子、电子控制器和位置传感器等部分组成。
定子由铁芯和绕组组成,负责产生磁场;转子则是由永磁体或电磁铁构成,负责在磁场中受力旋转。
电子控制器是无刷直流电机的核心部分,它根据位置传感器提供的转子位置信息,控制电机绕组的通电顺序和通电时间,从而实现电机的连续旋转。
位置传感器则负责检测转子的位置,为电子控制器提供反馈信号。
在无刷直流电机的工作过程中,当电机绕组通电时,会在定子中产生一个旋转磁场。
由于转子上的永磁体或电磁铁与定子磁场之间存在相互作用力,转子会在定子磁场的作用下开始旋转。
当转子旋转到一定位置时,位置传感器会向电子控制器发送信号,电子控制器根据接收到的信号控制电机绕组的通电顺序和通电时间,使定子磁场的方向发生变化,从而驱动转子继续旋转。
直流无刷电机硬件设计文档
硬件电路设计说明书V1 文档版本 1.0编写人:***编写时间:2015-06-10 部门:研发部审核人:审核时间:1.引言1.1编写目的本文档是无刷直流电机风机盘管电源电路及控制驱动电路的硬件设计说明文档,它详细描述了整个硬件模块的设计原理,其主要目的是为无刷直流电机控制驱动电路的原理图设计提供依据,并作为 PCB 设计、软件驱动设计和上层应用软件设计的参考和设计指导。
1.2产品背景1.3参考资料Datasheet:Kinetis KE02Datasheet:MKE02Z16VLC2Datasheet:MKE02Z64M20SF0RMDatasheet:FSB50760SFTDatasheet:TNY266Datasheet:FAN75272.硬件电路概述2.1电源部分电源部分主要功能是提供400V直流电供给电机,另外提供15V直流电给电机驱动芯片供电。
采用反激式开关电源设计。
2.1.1总体方案设计一款 100W驱动开关电源。
给定电源具体参数如下:(1)输入电压:AC 85V~265V(2)输入频率:50Hz(3)工作温度:-20℃~+70℃(4)输出电压/电流:400V/0.25A(5)转换效率:≧85%(6)功率因数:≧90%(7)输出电压精度:±5%系统整体框架如下如图所示为电源的整体架构框图,主要目的是在输入的85~265V、50Hz交流电下,输出稳定的恒压电机驱动直流电。
由图可知,电源电路主要包括了前级保护电路模块、差模共模滤波模块、整流模块、功率因数校正模块、DC/DC模块。
其中EMI滤波电路能够抑制自身和电源线产生的电磁污染,功率因数校正电路采用Boost有源功率因数校正,用电压环、电流环双环闭环进行控制。
DC/DC模块采用光电耦合将原边和副边进行反馈,控制了开关管的开通和关断,保持电压稳定在15V。
2.1.2系统接口2.2控制驱动电路控制驱动电路主要用于控制电机转速,使直流无刷电机按照设定速度平稳安静运行。
基于DSP28035的高速永磁无刷直流电机驱动系统硬件设计
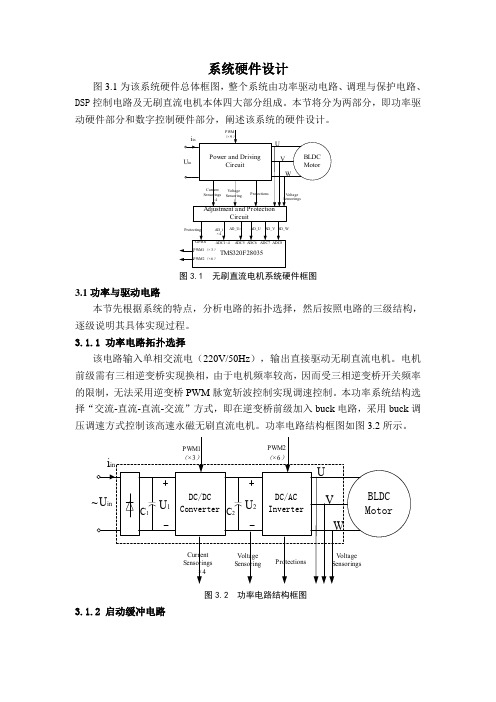
系统硬件设计图3.1为该系统硬件总体框图,整个系统由功率驱动电路、调理与保护电路、DSP控制电路及无刷直流电机本体四大部分组成。
本节将分为两部分,即功率驱动硬件部分和数字控制硬件部分,阐述该系统的硬件设计。
图3.1 无刷直流电机系统硬件框图3.1功率与驱动电路本节先根据系统的特点,分析电路的拓扑选择,然后按照电路的三级结构,逐级说明其具体实现过程。
3.1.1 功率电路拓扑选择该电路输入单相交流电(220V/50Hz),输出直接驱动无刷直流电机。
电机前级需有三相逆变桥实现换相,由于电机频率较高,因而受三相逆变桥开关频率的限制,无法采用逆变桥PWM脉宽斩波控制实现调速控制。
本功率系统结构选择“交流-直流-直流-交流”方式,即在逆变桥前级加入buck电路,采用buck调压调速方式控制该高速永磁无刷直流电机。
功率电路结构框图如图3.2所示。
图3.2 功率电路结构框图3.1.2 启动缓冲电路图 3.2中第一级采用二极管不控整流,再用大电容滤波后得稳定直流电压1U 。
电路上电时,由于电容1C 两端电压不能突变,上电产生瞬间的大电流给其充电,该电流太大将造成1C 损坏。
为此,电路中加入了启动缓冲电路。
如下图3.3所示,上电时晶闸管1Q 尚未导通,通过11R C 串联回路给1C 充电,充电电流较小,1U 缓慢上升,电容受到保护。
再利用电阻2R 、3R 对1U 分压采样,当1U 上升到约输入电压峰值的90%时,采样电压1s U 将超过设定的门限电压TH U ,通过比较器后驱动光耦,从而触发晶闸管导通。
晶闸管导通后,1R 被短路,电路进入正常工作状态。
此后向后级供电的过程中,晶闸管一直导通,2R 、4R 的阻值非常大,不对后级产生影响。
后级关断或电路掉电时,1Q 关断,4R 为1C 提供放电回路。
图中TH U 由CC V +经电阻分压得到,而CC V +是由/AC DC 模块电源获得。
G AU 1s U Q 1图3.3 启动缓冲电路示意图3.1.3 直流-直流变换该环节实现调压调速功能,直接利用Buck 变换器降压,但电机满载时该电路输出电流很大,所需输出滤波电感太大。
基于硬件FOC的无刷直流电机驱动器设计
基于硬件 FOC 的无刷直流电机驱动器设计邮编:114051摘要:随着科技水平的快速发展,对电机的控制要求越来越高,在工业上:电子装备过程中对电机的控制要求越来越高;在医疗领域中:远程控制手术、医护人员使用设备进行细微手术中对设备电机的精度要求越来越高。
并且目前电子数码消费品、工业控制、无人机、机械臂、云台、仿生机器人等设备的电机均需要高精度的闭环或者开环控制,以实现其精准化。
与有刷直流电机相比,无刷直流电机( brushless DC, BLDC) 用电子换向器取代了机械换向器,因此 BLDC 既具有直流电机良好的调速性能等特点,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点,广泛应用于电子数码消费品、工业控制、医疗设备、家用电器等领域。
本课题所设计的FOC矢量控制可以使电机的运行更加平稳和高效。
本课题还对传统的电机驱动进行升级改造,并能够实现双路电机同步控制。
并且使用了Simulink电机环境配置软件,进行电路模拟仿真,提高模块的实用性和可行性。
本项目能够实现实物与模型的同步,先基于模型的仿真控制,再进行实物的设计与升级。
关键词:FOC;Simulink;同步控制引言:目前对于电机的控制主要是BLDC,BLDC的驱动控制的方式有方波驱动与正弦波驱动。
方波驱动控制简单,但会产生刺耳的噪音,在电机的低速状态下非常难控制; 尽管正弦波驱动能够做到平滑的换向,在低速状态也具有良好的控制效果,但在高速状态下,由于电流环必须跟踪频率不断升高的弦波信号,还要克服由于振幅和频率不断提高的电机反电动势,当达到控制器的极限带宽时,这种控制就失去了作用。
矢量控制( field oriented control,FOC) 既具有正弦波驱动的平滑控制,又解决了高速状态下失控的问题,并且由于其控制特点,能够使电机运行更加高效。
一、驱动器设计原理FOC实现了电流矢量的控制和机电定子磁场的矢量控制,转矩波动小、效率高、噪声小、动态响应快,FOC技术有低转速下控制,电机换向,力矩控制,我们通过利用硬件设计软件立创EDA设计FOC 控制电路,设计基于STM32F407VET6的电机驱动控制模块,通过简单的焊接,实现FOC的模型化,实现对无刷直流电机的精准化控制, BLDC 的驱动控制的方式有方波驱动与正弦波驱动。
基于c8051的直流无刷电机控制系统的设计

基于c8051的直流无刷电机控制系统的设计
设计一个基于c8051的直流无刷电机控制系统,可以按照以下步骤进行:
1. 选择合适的c8051单片机芯片,建议选择具备PWM输出和
高速计数器功能的型号。
2. 设计电机驱动电路,包括功率电路和驱动电路。
功率电路通常由MOSFET H桥组成,负责将电机驱动电压转换为驱动电流。
驱动电路负责根据单片机控制信号控制MOSFET开关,
控制电机的起停和运动方向。
3. 编写单片机的控制程序。
需要实现以下功能:
- 设定电机转速或转矩的目标值;
- 读取电机的实际转速或转矩;
- 根据目标值和实际值进行比较,计算出控制电压;
- 生成PWM信号,控制电机驱动电路。
4. 调试和测试控制系统。
连接电机和单片机,进行测试和调试,确保系统正常工作。
5. 优化系统性能。
可以根据需要进行性能优化,例如增加闭环控制、采用磁编码器等。
以上步骤仅供参考,根据实际需求和资源可以进行适当调整和修改。
希望能对你有所帮助!。
直流无刷电机毕业设计

直流无刷电机毕业设计毕业设计论文论文题目:直流无刷电机学生姓名:学生学号:专业班级:指导教师:日期:AbstractBrushless DC Motor摘要无刷直流电机是最近发展起来的结合了多学科技术的一种新型电机,结合机电一体化,具有高速度、高效率、高动态响应、高热容量和高可靠性、免维护等优点,同时还具有低噪声和长寿命等特点。
非常适合使用在24小时连续运转的产业机械及空调冷冻主机、风机水泵、空气压缩机负载;低速高转矩及高频繁正反转不发热的特性,更适合应用于机床工作母机及牵引电机的驱动;其稳速运转精度比直流有刷电机更高,比矢量控制或直接转矩控制速度闭环的变频驱动还要高,性能价格比更好,是现代化调速驱动的最佳选择。
目前无刷电机已广泛应用于各种领域,如医疗仪器、分析仪器、材料处理、过程控制、机床工业、纺织工业、轻工机械、电动自行车等。
无刷直流电机的控制要比普通有刷电机的控制要复杂得多。
目前直流电机的控制方法主要有两种,一种是采用专用得直流电机控制芯片,如Motorola公司的MC33035;另一种控制方法各个厂家根据自己的需求采用单片机或DSP进行开发设计。
本设计主要采用嵌入式单片机ATMEGA48写入控制程序,从而形成一种高性能直流无刷电机控制器。
其不但能实现MC33035直流电机控制芯片的全部功能,而且具有接口灵活,功能完善,成本低廉、全数字控制等优点,用户能根据不同应用场合进行灵活配置。
关键词:无刷直流电机、HALL、PWM目录Abstract ............................................................................................... 错误!未定义书签。
摘要..................................................................................................... 错误!未定义书签。
无刷直流电机控制系统设计
s i g n a l s a r e a d j u s t e d t o r e a l i z e t h e c l o s e l o o p c o n t r o l f o t h e mo t o r w i t h a p p r o p r i a t e P I a r i t h m e t i c .
P WM 信 号 实现 电机 转 速 闭环 控 制 。 关键词 : d s P I C3 O F 4 0 1 1 , 无刷 直 流 电机 , I M1 4 4 0 0, 闭环 控 制
Ab s t ac t T hi s p ape r i n t r o duc e s a br u sh t es s di r ec t c ur r e n t mo t or c on t r o l s y s t em , a n d r ea l i l Th e s y s t em
co ns i s t s o f br u s hl es s di r ec t cu r r en t mo t o r , ds PI C3 0F 4 01 1 m i cr oc on t r o l l er , I M1 4 40 0 dr i v e ci r c ui t 。 et c S y s t e m c om p l e t e s a c qui s i 。 t i on o f h al l p os i t i on s e ns or si gn al , ou t pu t o f mot or c o mmu t a t i o n s i gn a l s , me a su r emen t o f mot or S s pee da nd t h e di gi t al P W M
基于DSP的直流无刷电机控制器的硬件设计

随着电力电子技术,新的永磁材料以及具有快速运算能 力的 DSP(数字信号处理器)的发展,直流无刷电机应用日 益普及。直流无刷电机具有和直流电机相似的优良调速性能, 又克服了直流电机采用机械式换向装置所引起的换向火花、 可靠性低等缺点,且具有体积小、重量轻、效率高、电机的 形状和尺寸灵活等优点,因此广泛应用在伺服系统、数控机 床、电动车辆和家用电器各领域,成为现代伺服技术的主方 向。
· 模块具有很低的电路电感,可以减小电压尖峰,在较低的开关损耗下可 以工作于较高的开关频率;
· 所有低端和高端 IGBT 的传输延迟匹配,可以防止直流电流加到电机上; · 内置死去时间控制提供充足死区时间防止高端 IGBT 和低端 IGBT 短路; · 故障安全工作确保过流过压时停机,使设计者不用设计过流和过压保护 电路; · 提供了温度监视和相电流检测引脚。
基于 DSP 的直流无刷电机控制器 的硬件设计
作者:曹华平
DSP-based Hardware Design of Brushless DC Motor Controller
(华南理工大学自动化科学与工程学院,广东 广州 510640) 曹华平,彭达洲,胥布工,黄健平
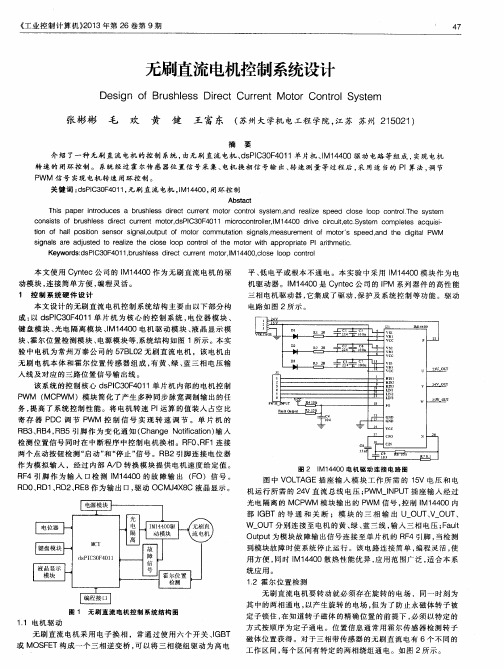
摘要:本文提出了一种基于 DSP 的直流无刷电机控制器的硬件电路,包 括电流环、速度位置环和 IPM(智能功率模块)驱动的硬件电路设计。 关键词:DSP 控制器;直流无刷电机;硬件设计
Communications Interface,串行通信接口)和 CAN 现场总线
模块。因此只需很少的系统元件就可以组成一个完整的伺服
系统。其典型应用硬件电路框图如图 1 所示。需要特别指出
的是其内部带有 PWM 模块,特别适用于电机控制。PWM 模
块有 6 个输出通道,从 PWM0 到 PWM5,可以配置为 3 对互
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
硬件电路设计说明书V1 文档版本 1.0编写人:***编写时间:2015-06-10 部门:研发部审核人:审核时间:1.引言1.1编写目的本文档是无刷直流电机风机盘管电源电路及控制驱动电路的硬件设计说明文档,它详细描述了整个硬件模块的设计原理,其主要目的是为无刷直流电机控制驱动电路的原理图设计提供依据,并作为 PCB 设计、软件驱动设计和上层应用软件设计的参考和设计指导。
1.2产品背景1.3参考资料Datasheet:Kinetis KE02Datasheet:MKE02Z16VLC2Datasheet:MKE02Z64M20SF0RMDatasheet:FSB50760SFTDatasheet:TNY266Datasheet:FAN75272.硬件电路概述2.1电源部分电源部分主要功能是提供400V直流电供给电机,另外提供15V直流电给电机驱动芯片供电。
采用反激式开关电源设计。
2.1.1总体方案设计一款 100W驱动开关电源。
给定电源具体参数如下:(1)输入电压:AC 85V~265V(2)输入频率:50Hz(3)工作温度:-20℃~+70℃(4)输出电压/电流:400V/0.25A(5)转换效率:≧85%(6)功率因数:≧90%(7)输出电压精度:±5%系统整体框架如下如图所示为电源的整体架构框图,主要目的是在输入的85~265V、50Hz交流电下,输出稳定的恒压电机驱动直流电。
由图可知,电源电路主要包括了前级保护电路模块、差模共模滤波模块、整流模块、功率因数校正模块、DC/DC模块。
其中EMI滤波电路能够抑制自身和电源线产生的电磁污染,功率因数校正电路采用Boost有源功率因数校正,用电压环、电流环双环闭环进行控制。
DC/DC模块采用光电耦合将原边和副边进行反馈,控制了开关管的开通和关断,保持电压稳定在15V。
2.1.2系统接口2.2控制驱动电路控制驱动电路主要用于控制电机转速,使直流无刷电机按照设定速度平稳安静运行。
控制方案采用开环控制,驱动方式采用方波驱动。
2.2.1控制系统整体框架如下:控制电路模块控制芯片采用飞思卡尔半导体公司的32位微控制器MKE02Z16VLC2,该芯片基于 ARM 结构体系的 Cortex™-M0+内核,其中的FlexTimer/PWM (FTM)模块为电机控制提供了很方便的接口,方便控制输出pwm控制电机转速。
控制方案采用有传感器开环控制,传感器采用霍尔传感器检测电机转速。
驱动电路芯片采用FSB50760SFT,该芯片将MOSFET集成在芯片内,减少了控制电路的大小,同时,芯片内部还集成了温度传感器,当温度过高时,控制芯片将停止输出PWM信号,电机将自动停机。
控制驱动板上留有5个接口,分别是VM,GND,VCC,VSP,FG,其中VM是310V输入接口,VCC为15V 输入接口,VSP为调速接口,根据VSP输入电压大小来调节电机转速,FG为电机转速输出接口。
2.2.2系统接口电路3.硬件系统详细设计3.1电源部分PFC电路详细设计电源电路总体电路图见附件1。
分析各电路模块,进行具体设计并分析其工作原理,具体电路包括输入端保护电路、EMI滤波电路、AC/DC 整流桥、Boost PFC 电路、高频变压器的设计、反馈控制电路模块、恒压输出电路等,并设计元器件参数和型号选择。
3.1.1输入保护电路设计设计输入保护模块如图 4.1 所示,主要有过流保护、过压保护。
图中 F1 为熔丝管,熔丝管熔点低,电阻率高,熔断速度快,成本低廉,当开关电源产生短路,电流要是超过了熔断电流,熔丝管将会熔断。
起到过电流保护的作用,选用 3A/250V。
图中 VTR 为压敏电阻,压敏电阻值随端电压而变化,对过电压脉冲响应快,耐冲击电流能力强,漏电小,温度系数低,吸收浪涌电压,防雷击保护,起到过电压保护的作用,选用 14D471K。
图中 NTC 是负温度系数热敏电阻器,热敏电阻器电阻值随温度升高而降低,电阻温度系数一般为-(1-6)%/℃,采用热敏电阻,瞬间限流效果好,由于电源的启动并运行,电阻发热量较大,热敏电阻器的阻值能够迅速减小,功耗能够降低。
其主要作用是防止通电瞬间出现过流现象,选用 T5D-11。
3.1.2 EMI 滤波器设计一般抑制电磁干扰主要为差模和共模干扰。
差模干扰产生于两条电源线之间,信号相对参考点大小相等,方向相反;共模干扰产生于电源线和大地之间,信号相对参考点大小、方向都相同。
由于两种干扰是同时存在的,并且共模比差模更容易引起电磁干扰,所以在开关电源设计 EMI 滤波器主要还是抑制共模干扰信号。
电路中包括共模电感、电容 C1、C2为Y电容,选取3300Pf/1Kv的瓷片电容,C3、C4选取安规电容0.33u/275v。
泄放电阻 R1、R2用于防止断电后C3电容放电至电源接口。
L共模电感是在一个磁环上,绕着匝数相同、方向相反的两个绕组,当共模信号电流流过时,线圈上的磁场增强,对共模信号产生了很大的感抗,起到了很大的抑制作用。
共模电感选型UU10.5-10mH min-1.0A。
3.1.3 整流电路设计整流桥电路如下图所示:经整流桥输出后电压为310v直流电,当输入电源的正半周,D1、D3 导通,D2、D4 截止,在输出的电压上形成上面正电压下面负电压的半波整流电压,当输入电源为负半周时导通和截止状态相反,即 D2、D4 导通 D1、D3 截止,同理得到另一半波整流电压,于是得到一个与全波整流相同的电压波形。
整流桥选型为GBJ2508。
3.1.4功率因数校正电路功率因数校正采用飞兆半导体公司推出的高集成度电源芯片FAN7527B,该芯片工作时电流小,最大不超过8mA,VCC启动门限为12V,关闭电压最大值是9V,启动电流典型值为60μA最大不超过100μA。
采用8引脚的DIP和SOP封装,其引脚排列如图所示,引脚功能介绍如表所示。
序号引脚功能1 INV 放大器的反相输入端,电压经过电阻分压2.5V到此管脚2 EA_OUT 放大器的输出端,与INV端口连接电容形成补偿网络3 MULT 乘法器的输入端,与整流输出的分压电压连接4 CS PWM比较器输入脚。
采样MOS管的电压值,连接于比较器,内置的滤波器减小高频噪声5 IDET 零电流检测端6 GND 地7 OUT 驱动输出。
推挽式输出可以驱动开关管的最高电流为500mA8 VCC 芯片电源端3.1.5FAN7527B工作原理分析(1)启动过程在接通电源瞬间,电容C6通过电阻R1实现充电。
当电容的电压值升高到芯片的启动电压后,芯片导通,并驱动开关管。
在芯片导通后,随着电流的增加电容开始放电。
在电容C上的电压降低过程中,电感器上的感应电压通过二极管D的整流作用,连接到Vcc脚,使Vcc升高到所需要的电平。
(2)过电压保护和误差放大器PFC输出电压Vo经电阻进行采样,送入电压误差放大器的反相输入端,误差放大器同相输入端有2.5V的基准电压。
放大器输出与乘法器相连,控制器的外部有电容电阻等零极点补偿元件。
误差放大器的输出有1.8V的参考电压实现过电压保护,当负载出现异常,误差放大器输出端电压幅值低于 1.8V,过电压比较器被触发,驱动器将被关闭。
(3)乘法器乘法器是整个功率因数校正器的核心,它为内部的电流回路提供参考电流,用来控制转换器的输入电流(经整流后),使电路产生所期望的幅值和波形,并得到高的功率因数。
设乘法器的增益为 K,输出电压如下所示:其中 Vm1为 3 脚的采样电压,用分压电阻获得,Vm2为误差放大器的输出,Vref为基准电压。
由于输入电压的波形是正弦电压,Boost 电感的峰值电流保证在每时刻都跟踪输入正弦电压的波形轨迹,促使输入的电流相位和波形与输入的正弦电压相同。
(4)电流感测比较器流过开关管的电流在电流采样电阻上转换为电压值加到芯片的 4 脚上,如果 4 脚上的电压大于电流感测比较器的门限,则停止驱动开关管的 PWM 信号。
(5)零电流检测器FAN7527B 采用峰值电流模式进行控制,零电流检测使得开关管导通,采用Boost 电感的峰值电流达到门限值而将开关管关断。
电感电流降至零时,通过FAN7527B 的 5 脚 Idet的电感器副绕组电压极性的反转进行检测,进行 PWM 控制,使 MOSFET 再次导通。
当电感电流沿向上的斜坡从零增加到峰值之后,MOSFET 关断,直到电感电流下降为零。
(6) 驱动输出FAN7527B 包含一个图腾柱(带高电平钳位)的输出级,专门针对功率 MOSFET 的直接驱动而设计的。
输出能力高达 500mA 峰值电流,典型的上升和下降时间分别为 130ns 、50ns 。
3.1.6 BOOST PFC 主要元器件参数设计(1) 功率因数校正电路的主要指标额定输出功率:在考虑效率的前提下,电路额定输出功率设为 Pout=100W宽电压输入:Vin=85Vac~265Vac ;电网频率:50Hz ;输出电压 Vo :Vomax=400V ;效率 η:90%;功率因数:0.98;输出最小电压:Voutmin=150V ;开关频率的最小值:fswmin=34kHz ;PFC 输出电流有效值为:A V P I 25.0400100out out out === 输入最大功率W P P 1.111%90100outin ===η 输入平均电流A PF V P I 33.198.0851.111acmin in in =⨯=•= 升压电感峰值电流A I I 77.333.12222in pk =•=•=电感L 最大电流有效值A I I 66.2253.12pkrms === BOOST 升压电感设计方案采用 Boost 电感在电流连续模式下,其电感值与输出功率、最小开关频率有关系,其具体公式如下:开关周期 Ts 为:当 sinwt=0 时,开关周期最大,由上式得电感 L 表示式为:代入数据L=660uh 升压电感器 L 的线圈匝数为:流过mos 管最大电流:A V P I 85.12859.0100222inmin 0pkmax =⨯⨯⨯=⨯⨯•=η 561009.12.085.11066046p =⨯⨯⨯⨯=--N 实际取值60匝,辅助绕组计算计算得Naux=4.2,实际取值5匝。
3.1.7输出电容的设计输出滤波电容的选择需要考虑 PFC 电路直流输出电压、保持时间、输出电压纹波。
通常输出滤波电容可以选用铝电解电容,铝电解电容工作范围宽、耐较大纹波电流、低漏阻、寿命长。
输出电容的数值由下式决定:uH V f I C o 19563414.3225.020max min =⨯⨯⨯=∆>π 实际取值为220uH3.1.8输出采样电阻的设计电压误差放大器正向输入电阻的选择,PFC 的输出电压,经过取样电阻的采样,送到 FAN7527B 的 1 脚 INV ,与基准电压 2.5V 进行比较。