微型滚珠丝杠花键
《工业机器人技术基础》教学设计 模块3 工业机器人的机械系统
(三)组合应用
滚珠丝杠和导轨在组合使用时,丝杠与导轨平行安装,电机驱动丝杠转动,这样运动体就可以在导轨上做线性运动。根据实际需要与安装环境的不同,通常一根丝杠配合一根或两根导轨组合使用。
参考以下形式:
1.衔接导入
2.悬念导入
3.情景导入
4.激疑导入
5.演示导入
6.实例导入
7.其他形式
本章基本知识汇总
单元1工业机器人机械系统概述
一、机械系统的意义
最早的“机械”定义是古罗马建筑师维特鲁威在其著作《建筑十书》中所提出,主要是对搬运重物的机械和工具作了区别:“机械和工具之间似乎有着以下的区别,即机械是以多数人工和很大的力量而发生效果,如重弩炮和葡萄压榨机;而工具则是由一名操纵人员慎重地处理来达到目的,如蝎形轻弩炮或不等圆的螺旋装置。”因此,机械和工具都是实际生产中不可缺少的东西。古罗马数学家希罗认为机械的要素有五类:轮与轴、杠杆、滑车、尖劈、螺旋。这一论述反映了古典机械的特征。
因此,同步带传动被广泛用于纺织、机床、烟草、通讯电缆、轻工、化工、冶金、仪表仪器、食品、矿山、石油、汽车等各行业各种类型的机械传动中,尤其在静音、无尘、干燥的工作环境下具有巨大的优势。
2.同步带的失效形式
(1)带体疲劳断裂。
(2)带齿剪断和压溃。
(3)带侧、带齿磨损,包布剥离。
(4)承载层伸长、节距增大,形成齿的干涉、爬齿。
2.齿轮机构的缺点
(1)制造和安装精度要求高,成本较高。
thk_滚珠丝杠全部选择过程

滚珠丝杠的外部设备 .................. A-801 支撑单元 EK、BK、FK、EF、BF和FF型 ..... A-802 ɾ结构与特长 ........................ A-802 ɾ种类 ............................. A-804 ɾ支撑单元的种类以及适用丝杠轴外径 ..... A-805 ɾ轴承型号和特性值 ................... A-806 ɾ安装例............................ A-807 ɾ安装步骤 .......................... A-808 ɾ推荐轴端形状的种类 ................. A-810 螺母座 MC型 ......................... A-812 ɾ结构与特长 ........................ A-812 ɾ种类 ............................. A-812 锁紧螺母RN型 ........................ A-813 ɾ结构与特长 ........................ A-813 ɾ种类 ............................. A-813
直线电机双驱龙门机器人设计与控制

图1 龙门机器人结构图
直线电机
直线电机相当于旋转电机结构上在顶部沿径向剖开并将其圆周拉直,不需要任何中间环节,可直接驱动被控制对象产生直线轨迹运动,打破了传统“旋转电机+化环节”的传动形式。
对给定路径可用高速进行高精度跟踪与定位,具有比传统旋转电动机大得多的加速度和减速。
直线电机安装底座采用大理石材质,具有平面度高、温升变形量小优点。
电机选型主要计算推力公式如下:
()**a i f m a m g F u
F F =∗++=+ ()
2
221231234
()*i
f
f i f F F t F t F F t t t t t +∗+∗+−=
+++ 式(1)中F p 为最大推力;m 为负载重量;a 为最大加g 为重力加速度;F a 为额外垂直压力;u 为摩擦系数,
图3 龙门双驱控制架构
表1 滚珠丝杠花键轴耦合控制算法
丝杠螺母电机花键螺帽电机轴运动运行停止Z垂直运动运行运行θ旋转运动停止运行Z和θ
图4 机器人样机
4 结语
直线电机双驱龙门机器人采用直线电机和滚珠丝杠花键轴作为主要传动结构,并进行龙门双驱控制和丝杠花键耦合控制。
实测结果表明,速度、同步精度达到预期,系统运行可靠性高且成本低,在电子、半导体等行业具有重要的实用价值。
参考文献
[1]王伟进.直线电机的发展与应用概述[J].微电机,2004,(1):
45-46.
[2]陈海森,张德新,王继河.基于H-交叉耦合算法的双驱同步控
制[J].浙江大学学报,2017,(1):131-137.
图6 同步控制精度监控。
THK直线导轨——安昂
THK介绍THK轴承THK轴承公司介绍日本THK公司于1971 年,在日本东京Meguro-ku 成立,最初名称为 Toho Seiko Co., Ltd.。
后更名THK C O.,LTD。
“THK”代表“ Toughness(坚韧)”、“ High Quality(高品质)”和“ Know-how(技术诀窍)”。
THK发展历程:1971 年,THK 在东京 Meguro-ku 成立,最初名称为 Toho Seiko Co., Ltd.。
1972 年,THK 成为世界上第一家开发通过滚动接触实现直线运动的方法的公司,并开始制造和销售商业化的成果:直线运动 (LM) 导轨。
1977 年,THK 的 Kofu 工厂(第一家完善的 LM滚动导轨生产厂)成立。
这是 THK 扩大生产设施的第一步。
1981 年在美国成立了 THK America Inc.,次年在德国成立了 THK Europe,为国际销售网络的扩展打下了基础。
1984 年在日本成立了 Gifu 工厂,并于 1985 年在日本成立了 Mie 工厂和 Yamaguchi 工厂,进一步扩大生产能力。
1996 年,THK 开发了“球保持器型 LM滚动导轨”,这种产品的性能显著优于传 THK直线轴承统产品。
如今THK拥有四位一体的生产和销售基地:日本、欧洲、美洲和亚洲。
THK产品及应用:THK公司的“直线运动系统”飞跃性地提高了工作机械、产业用自动装置、半导体制造装置等先进机电一体化设备的高精度化,省力化,高速化等机械性能,并为其商品化做出了划时代的贡献。
THK凭借独特的机械组件,包括LM 导轨设备,滚珠花键、滚珠丝杠和连杆球,享誉全球。
THK直线运动系列产品广泛应用于机床、加工中心、汽车、橡胶、包装、工业机器人、半导体制造装置、医疗器械及其他各种电子控制机器等。
LM导轨的先驱机器的运动零件可分为滚动件、直线运动件或两者的组合件。
随着大约 110 年前滚动轴承的开发,滚动接触成为了实现滚动运动的标准方法。
基于SCARA机器人的运动学分析及关节解耦
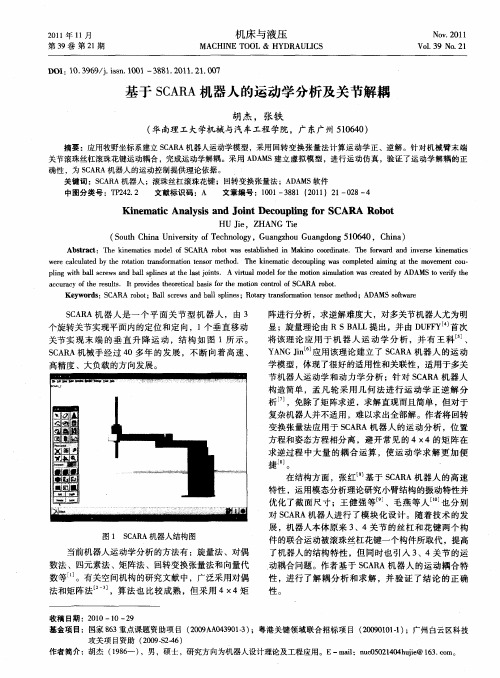
键 ,其结构如 图 3所 示 ;但是 基于该 结构 的特殊性 , 两关节 的运动 不能 单独 完成 ( 丝杠 螺母 旋 转 ,则丝 杠既旋转又垂直移 动 ) ,而是相 互耦合 ;需要 丝杠螺 母端 同步轮和花键螺母端 同步轮配合动作 。在工程应
用 和控制 中 ,直接控制 的是 电机 的转速和转角 ,因此
图 1 S A A机器人结构图 CR
件的联合运 动被滚珠丝杠花键一个构件所取代 ,提高
了机器人 的结构 特性 ,但 同时也 引入 3 4关节 的运 、 动耦合 问题 。作者基 于 S A A机器人 的运动耦 合特 CR 性 ,进行 了解耦 分 析和求 解 ,并 验证 了结论 的正确
性。
・2 9・
1 运动 学分 析 11 坐标 系的建 立 .
回转 变 换 张 量 法 基 于牧 野 坐 标 系 分 析
各连 杆 之 间 的变 化 关 系 ,并 求 解 末 端 的位 姿 。牧 野 坐 标 系 是 在
E ln・0 0 c(+ +)0 (+ + ) 。 ・ 20 1 L 0 2 3 s 00 3 j i I
基于 S A A机器人的运动学分析及关节解耦 CR
胡 杰 ,张铁
( 南理 工大 学机 械 与汽 车工程 学 院 ,广 东广 州 504 ) 华 160
摘要 :应用牧野坐标系建立 S A A机器人 运动学模 型 , CR 采用 回转变 换张量 法计算 运动学 正 、逆解 。针对机 械臂末 端
关节滚珠丝杠滚珠花键运动耦合 ,完成运动学解耦 。采用 A A S建立虚拟 模型 ,进行运 动仿 真 ,验证 了运 动学解耦 的正 DM 确性 ,为 S A A机器人的运动控制提供理论依据。 CR 关键词 :S A A机器人 ;滚珠丝杠滚珠花键 ;回转变换张量法 ;A A CR D MS软件 中图分 类号 :T 22 2 P 4 . 文献标识码 :A 文章编 号 :10 3 8 2 1 )2 0 8- 0 1— 8 1(0 1 1— 2 4
滚珠丝杠花键轴的传动原理
滚珠丝杠花键轴的传动原理小伙伴们!今天咱们来聊聊一个超酷的机械零件——滚珠丝杠花键轴。
这玩意儿听起来就很厉害的样子,其实它的传动原理就像一场超级有趣的机械小魔术呢!咱先来说说滚珠丝杠部分吧。
想象一下,有一根长长的丝杠,就像一根超级精致的大螺丝。
丝杠上有一圈一圈的螺纹,这些螺纹就像是为滚珠们准备的专属跑道。
然后呢,那些滚珠就像是一群超级活泼的小钢珠精灵。
它们住在这个螺纹跑道里,当丝杠开始转动的时候呀,就像是在给这些小钢珠精灵下命令。
丝杠按照一定的方向转,小钢珠们就会在螺纹跑道里欢快地滚动起来。
这一滚动可不得了,它们就带着一种神奇的力量开始推动跟丝杠配合的部件啦。
比如说,如果有个螺母跟丝杠配合着,那这个螺母就会在滚珠的推动下,沿着丝杠的轴向开始移动。
就好像小钢珠们在齐心协力地把螺母往前或者往后推呢。
这就像是一群小伙伴一起推一个大箱子,只不过这里是小钢珠在机械的世界里完成这个任务。
再来说说花键轴部分哦。
花键轴就像是一个有着特殊造型的轴,它的身上有好多像小牙齿一样的键槽。
这些键槽可不是为了好看的,它们是为了和其他部件完美配合的。
当有另一个部件,比如说一个带花键孔的零件要和花键轴连接的时候,那些键槽就像是一把把小钥匙,准确无误地插入到对应的孔里。
这样呢,花键轴在转动的时候,就能带着这个连接的部件一起转动啦。
而且因为键槽和孔的配合很紧密,所以在转动的时候就非常稳定,不会出现那种摇摇晃晃的情况。
这就好比两个人手拉手跳舞,他们紧紧地握着对方的手,然后随着音乐的节奏一起转动,既稳定又和谐。
那滚珠丝杠和花键轴组合在一起的时候呢,那可真是强强联合。
滚珠丝杠负责把转动转化为精确的轴向移动,而花键轴呢,在这个过程中又能保证整体结构的稳定性和良好的扭矩传递。
就像是一个团队里,有的成员负责精准的操作,有的成员负责稳定的支撑,大家各司其职,把整个传动工作完成得特别出色。
比如说在一些自动化设备里,像那种高精度的数控机床。
滚珠丝杠花键轴就发挥着至关重要的作用。
SCARA工业机器人设计计算说明书
Harbin Institute of Technology综合课程设计Ⅱ报告题目:SCARA工业机器人设计院系:机电工程学院班级: *******姓名: ****学号: ***********指导教师: ***哈尔滨工业大学2017年10月26日目录第1章 SCARA机器人简介.................................... 错误!未定义书签。
第2章SCARA机器人的总体设计 .............................. 错误!未定义书签。
SCARA机器人的驱动方式............................... 错误!未定义书签。
液压驱动 .......................................... 错误!未定义书签。
气压驱动 .......................................... 错误!未定义书签。
电力驱动 .......................................... 错误!未定义书签。
SCARA机器人驱动方式的确定........................... 错误!未定义书签。
SCARA机器人的减速器选择............................. 错误!未定义书签。
SCARA机器人传动机构的对比与分析..................... 错误!未定义书签。
SCARA机器人机构杆件参数初定......................... 错误!未定义书签。
SCARA机器人运动空间计算............................. 错误!未定义书签。
SCARA机械臂材料初定................................. 错误!未定义书签。
第3章 SCARA机器人关节元件设计计算........................ 错误!未定义书签。
SCARA机器人结构优化设计与运动分析_卢军
0 引 言
SCARA(Selective Compliance Assembly Ro- bot Arm)为 在 选 择 方 向 具 有 柔 顺 性 的 装 配 机 器 人,与一般的关节 型 机 器 人 相 比,在 平 面 上 具 有 很 好 的 灵 活 性 ,而 在 与 平 面 垂 直 的 方 向 具 有 很 高 的 刚 性[1],且 SCARA 装 配 机 器 人 有 较 大 的 工 作 区 域,
间如图2所示.
图2 SCARA 装配机器人工作空间图 SCARA 机器人总装图如图3所示.
1.1 总 体 设 计 如图 1 所 示,SCARA 平 面 关 节 式 装 配 机 器
图1 SCARA 型机器人 人 ,具 有 四 个 自 由 度 ,三 个 旋 转 关 节 轴 线 相 互 平 行 , 实 现 平 面 内 定 位 和 定 向 ,此 外 ,附 加 一 个 滑 动 关 节 ,
方案二:大臂 回 转 选 择 齿 轮 减 速 传 动,小 臂 回 转 采 用 二 级 同 步 齿 形 带 传 动 ,但 要 求 较 高 的 装 配 精 度,结构也较复杂;主 轴 上 下 移 动 选 择 步 进 减 速 电 机直接驱 动 丝 杠 螺 母 传 动,变 旋 转 运 动 为 直 线 运 动,实现主轴沿 Z 轴 方 向 的 上 下 运 动[7].但 相 对 同 步齿形带重量较 大,需 要 电 机 输 出 转 矩 较 大,加 工 要 求 高 ;主 轴 旋 转 设 计 同 方 案 一 .
使进料更容易.它 是 一 种 精 密 型 装 配 机 器 人,具 有 速度快、精 度 高、柔 性 好 等 特 点,可 应 用 于 电 子、机 械和轻工业等有 关 产 品 的 自 动 装 配、搬 运、调 试 等 工作,适合于工厂 柔 性 自 动 化 生 产 的 需 求.由 于 这 种 机 器 人 所 具 有 的 各 种 特 性 符 合 用 户 的 需 求 ,因 此 需求量迅速上升.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
●适用例 Application Example
BSSP separated type BSSP分离型
BSSP overlap type BSSP重叠型
使用分离型,可大大节省空间。 最适用于贴片机等用途。
Using "Separated type" of Ball Screw Spline is suitable for downsizing devices and equipment. Suitable for Chip-Mounter application etc.
使用重叠型,可确保长行程并实现小型化设计。最适用 于小型Scalar机器人的前端部组件等。
Using "Overlap type" can save Shaft length and makes devise as minimized as possible. For example, suitable for Miniature Scalar Robot, especially for the head part.
Bore hollow 中空孔
Once Ball Spline Nut directed to the Motor turns, the Torque will transmit to the Shaft and Screw Shaft will turns.
如果使连接在电机上的滚珠花键螺母旋 转,则转矩将传至丝杠轴,带动丝杠轴旋 转。
Air 空气
Hollow Motor 中空轴电机
Ball Screw Nut 滚珠丝杠螺母 Once Ball Screw Nut directed to Motor turns, Ball Spline Nut will sustain not turning and Screw Shaft moves up and down. 如果使连接在电机上的滚珠 丝杠螺母旋转,则滚珠花键螺 母将变为止转机构,丝杠轴作 垂直(上下)运动。
●Features
· This is a combined product which is possible for linear and rotational movement as well as suction at the same time with one unit.
· Achieved developing very compact product as "Overlap type" using Miniature Ball Screws and Miniature Ball Splines .
Multi-purpose products 组合产品
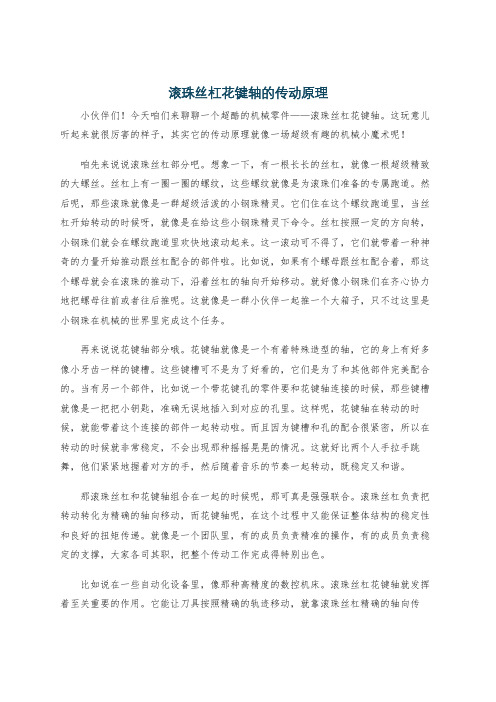
Multi-purpose products ose products 微型滚珠丝杠花键
Miniature Ball Screw with Ball Spline
由滚珠丝杠厂商和滚珠花键厂商联手打造的混合、紧凑、轻量型组合产品。 Ball Screw manufacturing company(KSS)and Ball Spline manufacturing company(HEPHAIST)
BSSP分离型 BSSP Separated type
Ball Spline groove 滚珠花键槽
Ball Screw Nut 滚珠丝杠螺母
将滚珠丝杠和滚珠花键加工在同一根轴上的组合产 品。
It's a combined products, which has Ball Screw and Ball Spline processed on the same Shaft.
Once Ball Screw Nut directed to Motor turns, Ball Spline Nut will sustain not turning and Screw Shaft moves up and down.
如果使连接在电机上的滚珠丝杠螺母旋 转,则滚珠花键螺母将变为止转机构,丝 杠轴作垂直(上下)运动。
Ball Screw groove 滚珠丝杠槽
Ball Spline Nut 滚珠花键螺母
BSSP重叠型 BSSP Overlap type
Ball Spline Nut 滚珠花键螺母
Ball Spline groove 滚珠花键槽
通过将滚珠丝杠和滚珠花键设置在相同的部位,可 实现小型化和长行程。
By processing Ball Screw and Ball Spline on one place makes product have longer travel and compact.
collaborated for developing new product which is focused on Hybrid, Compact and lightweight.
●特点 · 仅使用单件产品,即可实现直动(Z)、旋转(θ)、吸附动作的 组合产品。 · 通过小径滚珠丝杠和小径滚珠花键的重叠,最大限度地实 现了小型化。
Bore hollow 中空孔 Bore hollow can be multi uses. For example vacuum and blow function. 可利用设在丝杠轴上的中空 孔,提供正压、负压。
Bore hollow can be multi uses. For example vacuum and blow function.
Ball Spline Nut 滚珠花键螺母 Once Ball Spline Nut directed to the Motor turns, the Torque will transmit to the Shaft and Screw Shaft will turns. 如果使连接在电机上的滚珠 花键螺母旋转,则转矩将传至 丝杠轴,带动丝杠轴旋转。
Ball Screw groove 滚珠丝杠槽
Ball Screw Nut 滚珠丝杠螺母
J101
●使用例 Usage example
皮带驱动 Belt Drive
中空轴电机驱动 Hollow Motor Drive
Ball Screw Nut 滚珠丝杠螺母
Air 空气
Ball Spline Nut 滚珠花键螺母