多视频运动对象实时分割及跟踪技术
trackformer原理

TrackFormer是一种基于编码器-解码器转换器结构的端到端多目标跟踪和分割模型,它利用自回归的方式在视频序列中跟踪目标。
该模型首先通过视频序列检测运动的物体,使用一个自回归的方式跟踪对象,同时推理位置、遮挡和对象身份。
在模型结构上,TrackFormer包括一个编码器和一个解码器,编码器主要完成特征提取和数据压缩,解码器主要完成特征解码和目标识别。
编码器采用残差块和卷积操作,将多层特征融合在一起,以提高模型的准确性和稳定性。
解码器则采用注意力机制,对特征进行解码,以实现多目标跟踪和分割。
除了模型结构,TrackFormer还采用了一些优化技术,以提高模型的跟踪和分割性能。
首先,它引入了自回归跟踪查询的概念,通过自回归的方式在视频序列中跟踪目标,从而实现更准确的跟踪。
其次,它利用了注意力机制,在解码器中利用注意力函数计算每个对象的重要性,以实现更精确的分割。
最后,它采用了多尺度模型,通过对多个尺度的图像进行处理,提高了模型的适应性和鲁棒性。
在实际应用中,TrackFormer可以用于多种场景,如自动驾驶、智能安防、视频监控等。
它可以检测运动的物体,并对其进行跟踪和分割,从而提高系统的实时性和准确性。
在未来,随着Transformer 模型的不断改进和发展,它将在更多的自然语言处理任务中发挥重要作用。
AE运动跟踪教程:将图像或文字与视频中的对象精确匹配

AE运动跟踪教程:将图像或文字与视频中的对象精确匹配AE(After Effects)是一款功能强大的视频制作和特效处理软件,可以实现各种令人惊叹的视觉效果。
其中之一就是运动跟踪功能,它可以将图像或文字与视频中的对象进行精确匹配。
本文将详细介绍如何在AE中进行运动跟踪,并给出步骤和注意事项。
一、准备工作1. 确保已经安装并打开了AE软件。
2. 导入需要进行运动跟踪的视频文件和要匹配的图像或文字素材。
二、创建一个新的合成项目1. 点击“文件”菜单,选择“新建”-“合成”(或使用快捷键Ctrl+N)。
2. 在出现的对话框中,设置合成的尺寸、帧速率和时长等参数,并点击“确定”。
三、将视频文件拖入工作区1. 打开“项目”面板,在面板中找到要进行运动跟踪的视频文件。
2. 将视频文件拖拽到合成面板中,放在底部的图层上。
四、运动跟踪设置1. 选中合成面板中的视频图层,在菜单栏中选择“动画”-“跟踪”-“设置跟踪点”。
2. 在视频预览面板中,选择一个需要跟踪的物体,并点击鼠标左键进行标记。
可以选择多个跟踪点。
3. 在右侧的“跟踪控制”面板中,调整跟踪设置,如跟踪类型、特征区域大小等。
4. 点击“跟踪”按钮,开始进行运动跟踪。
五、应用运动跟踪数据1. 运动跟踪完成后,在“跟踪控制”面板中点击“应用”按钮,将跟踪数据应用于图层。
2. 选择要与跟踪点匹配的图像或文字素材,将其拖拽到合成面板中。
3. 将图像或文字素材放置在需要进行跟踪匹配的位置上。
六、调整匹配效果1. 选中匹配的图像或文字图层,在菜单栏中选择“动画”-“跟踪”-“手动跟踪”。
2. 在渲染视窗中,使用鼠标调整图像或文字素材的位置、缩放、旋转等参数,使其与视频中的对象完美匹配。
3. 根据需要,在“效果控制”面板中对图层进行进一步的属性和效果调整。
七、导出和保存1. 在菜单栏中选择“文件”-“导出”-“添加到Adobe Media Encoder队列”。
2. 在Adobe Media Encoder中,选择输出格式、编码设置等参数,点击“确定”按钮开始导出。
对象追踪的技巧
对象追踪的技巧对象追踪是指在图像或视频中识别和跟踪特定对象的过程。
它在计算机视觉和机器视觉中具有重要的应用,例如视频监控、自动驾驶、人机交互等领域。
在本文中,我将介绍一些常用的对象追踪技巧及其原理。
1. 基于背景分割的对象追踪基于背景分割的对象追踪是一种常见的方法,它通过将背景和前景(目标对象)分离来实现追踪。
常用的背景分割算法包括帧差法、高斯混合模型(GMM)和基于统计学的像素级分类等。
帧差法通过比较相邻帧之间的像素差异来提取动态移动的前景区域,然后进行对象追踪。
GMM模型将每个像素看作是由多个高斯分布组成的,通过计算像素与背景模型之间的匹配度来进行背景分割,并实现对象追踪。
基于统计学的像素级分类方法将每个像素根据颜色、纹理等特征进行分类,来实现对象追踪。
2. 相关滤波器跟踪相关滤波器跟踪是另一种常见的对象追踪技巧,它基于模板匹配的思想。
首先,在第一帧图像中手动选择目标对象的位置和大小,作为初始模板。
然后,通过计算当前帧图像中与模板的相关程度,来确定目标对象的位置和大小。
在相关滤波器跟踪中,常用的相关滤波器包括最基础的互相关滤波器和更加复杂的粒子滤波器。
互相关滤波器通过计算输入图像上的每个位置与模板的互相关分数来进行对象追踪,得分最高的位置即为目标的位置。
粒子滤波器是一种基于蒙特卡洛采样的滤波器,通过随机生成一系列粒子来估计目标在图像上的位置。
3. 基于深度学习的对象追踪近年来,基于深度学习的对象追踪取得了显著的进展。
深度学习模型可以从大量数据中学习到特征表示和空间规律,能够更好地捕捉目标对象的语义信息和上下文关系。
基于深度学习的对象追踪方法可以分为两大类:单目标追踪和多目标追踪。
单目标追踪方法通过训练深度卷积神经网络来学习目标对象的特征表示,并结合目标模板和候选区域的得分来进行追踪。
多目标追踪方法则通过将目标追踪问题转化为目标检测问题,先检测图像中的目标,然后通过关联算法将目标在不同帧之间进行追踪。
视频检测和运动目标跟踪方法总结

视频检测和运动目标跟踪方法总结目前常用的视频检测方法可分为如下几类:光流法,时域差分法,背景消减法,边缘检测法,运动矢量检测法[2]。
一、光流法光流法[1]是一种以灰度梯度基本不变或亮度恒定的约束假设为基础对运动目标进行检测的有效方法。
光流是指图像中灰度模式运动的速度,它是景物中可见的三维速度矢量在成像平面上的投影,表示了景物表面点在图像中位置的瞬时变化,一般情况下,可以认为光流和运动场没有太大区别,因此就可以根据图像运动来估计相对运动。
优点:光流不仅携带了运动目标的运动信息,而且还携带了有关景物三维结构的丰富信息,它能够检测独立运动的对象,不需要预先知道场景的任何信息,并且能够适用于静止背景和运动背景两种环境。
缺点:当目标与背景图像的对比度太小,或图像存在噪音时,单纯地从图像灰度强度出发来探测目标的光流场方法将会导致很高的虚警率。
且计算复杂耗时,需要特殊的硬件支持。
二、时域差分法时域差分法分为帧差法和改进的三帧双差分法。
1.帧差法帧差法[8]是在图像序列中的相邻帧采用基于像素点的时间差分, 然后阈值化来提取出运动区域。
视频流的场景具有连续性,在环境亮度变化不大的情况下,图像中若没有物体运动,帧差值会很小;反之若有物体运动则会引起显著的差值。
优点:时域相邻帧差法算法简单,易于实现,对背景或者光线的缓慢变化不太敏感,具有较强的适应性,能够快速有效地从背景中检测出运动目标。
缺点:它不能完全提取运动目标所有相关像素点,在运动实体内部不容易产生空洞现象。
而且在运动方向上被拉伸,包含了当前帧中由于运动引起的背景显露部分,这样提取的目标信息并不准确。
2.三帧双差分法三帧双差分法与相邻帧差法基本思想类似,但检测运动目标的判决条件上有所不同。
三帧双差分较两帧差分提取的运动目标位置更为准确。
三、背景消减法背景消减法[4]是将当前帧与背景帧相减,用阈值T判断得到当前时刻图像中偏离背景模型值较大的点,若差值大于T则认为是前景点(目标);反之,认为是背景点,从而完整的分割出目标物体。
基于深度学习的目标分割与跟踪技术研究

基于深度学习的目标分割与跟踪技术研究随着人工智能技术的快速发展,深度学习在计算机视觉领域取得了巨大的成功。
其中,基于深度学习的目标分割与跟踪技术在许多领域中展现出了非凡的潜力和应用前景。
本文将重点研究这一技术,并探讨其在不同领域中的应用和挑战。
一、引言目标分割与跟踪是计算机视觉中重要的任务,旨在精确地识别和标定图像或视频中的目标,并追踪其运动。
传统的目标分割与跟踪方法往往依赖于手工设计的特征和模型,并且在复杂的场景下效果有限。
然而,基于深度学习的目标分割与跟踪技术通过学习图像或视频的高级特征,能够更加准确地实现目标的分割和跟踪。
二、基于深度学习的目标分割技术基于深度学习的目标分割技术主要包括语义分割和实例分割两种。
语义分割旨在将图像中的每个像素分配给不同的语义类别。
最常用的语义分割模型是全卷积网络(FCN),其通过使用转置卷积层进行像素级别的预测。
实例分割则在语义分割的基础上,进一步识别和分割不同的目标实例。
基于深度学习的目标分割技术在医学图像分割、自动驾驶、智能监控等领域都有广泛的应用。
例如,在医学图像分割中,通过训练深度神经网络模型,可以实现肿瘤的自动分割和定位,辅助医生进行诊断和治疗。
而在自动驾驶领域,目标分割技术可以帮助车辆识别和跟踪道路中的行人和车辆,提高安全性和可靠性。
三、基于深度学习的目标跟踪技术目标跟踪是指在视频序列中连续追踪目标的位置和形状的任务。
基于深度学习的目标跟踪技术主要包括单目标跟踪和多目标跟踪两种。
单目标跟踪是指追踪视频序列中的一个目标实例,而多目标跟踪则是同时追踪多个目标实例。
基于深度学习的目标跟踪技术通常采用卷积神经网络(CNN)或循环神经网络(RNN)进行特征提取和目标表示。
其中,Siamese网络是一种常用的单目标跟踪模型,通过学习目标和背景之间的相似性,实现目标的跟踪。
而多目标跟踪常使用卡尔曼滤波和深度卷积神经网络相结合的方法,通过融合多个目标的特征来提高跟踪的准确性和稳定性。
使用计算机视觉技术进行实时视频处理的方法与技巧

使用计算机视觉技术进行实时视频处理的方法与技巧实时视频处理是计算机视觉领域的重要研究方向之一,它可以在实时视频流中提取、分析和处理出有用的信息,为用户提供更多的实时应用和服务。
本文将对使用计算机视觉技术进行实时视频处理的方法与技巧进行介绍和讨论。
首先,实时视频处理的基础是对视频流进行实时获取和解析。
在计算机视觉领域中,常用的视频获取设备包括摄像头、无人机以及其他具备视频采集功能的设备等。
通过这些设备,我们可以获取到实时视频流,为后续的处理提供数据源。
其次,对实时视频进行处理需要使用到计算机视觉中的各种算法和技术。
这些技术包括但不限于物体检测、目标跟踪、图像分割和人脸识别等。
物体检测是指在视频流中定位和识别出感兴趣的物体,可以用于实现诸如行人检测、车辆检测等功能。
目标跟踪是指在视频流中实时跟踪一个或多个目标的运动轨迹,通常应用于视频监控、智能车辆等领域。
图像分割技术可以将视频流中的每一帧图像分割成多个区域,用于实现更精细的图像处理和分析。
人脸识别则是对视频流中出现的人脸进行识别和验证,广泛应用于人脸解锁、人脸支付等领域。
在实时视频处理中,算法的效率和准确性十分重要。
为了提高算法的效率,我们可以采用如下几种技巧。
首先,可以对视频流进行下采样,降低图像的分辨率,从而减少处理的数据量。
其次,可以采用并行计算的方式,利用多核CPU或者GPU来加速算法的运行。
此外,还可以利用硬件加速器如FPGA或者ASIC来提高计算性能。
对于目标跟踪任务,在追踪目标时可以进行特征选择和特征提取,减少计算复杂度。
对于实时性要求较高的任务,还可以使用快速算法,如快速傅里叶变换(FFT)等,提高处理速度。
除了算法和技术,实时视频处理还需要考虑系统的实时性和稳定性。
为了保证处理的实时性,我们可以采用多线程或者多进程的方式,将不同的任务分配给不同的线程或进程进行处理。
同时,对于计算量较大的任务,可以使用分布式计算的方式,将任务分配给多个计算节点进行处理,提高系统的处理能力。
tracking-by-segmentation方法的原理
tracking-by-segmentation方法的原理"Tracking by Segmentation"(通过分割进行跟踪)是一种计算机视觉中用于目标跟踪的方法。
该方法的原理是通过将目标从视频帧中分割出来,然后在连续帧之间跟踪这个目标的运动。
以下是"Tracking by Segmentation" 方法的基本原理:目标分割:首先,从视频帧中分割出包含目标对象的图像区域。
这通常需要使用图像分割算法,例如背景减除、阈值分割、边缘检测或语义分割等技术。
目标分割的目的是将目标与背景分离,以便进一步的跟踪。
特征提取:一旦目标被成功分割,就需要从目标区域中提取特征,以描述目标的外观和形状。
这些特征可以包括颜色直方图、纹理特征、形状描述符等。
这些特征将用于后续帧中的目标匹配。
运动估计:在接下来的视频帧中,通过比较当前帧中的目标特征与之前帧中的特征,估计目标的运动。
这可以通过不同的方法实现,如光流估计、外观模型匹配等。
通过运动估计,系统可以预测目标在下一帧中的位置。
目标匹配和跟踪:使用目标的特征和运动信息,将目标在连续帧之间进行匹配和跟踪。
目标匹配可以是一个关键步骤,它确定目标在新帧中的位置,以确保跟踪的连续性。
匹配可以通过各种方法实现,包括相关滤波、卡尔曼滤波、粒子滤波等。
更新目标模型:随着时间的推移,目标的外观可能会发生变化,例如光照条件的变化、遮挡或目标本身的运动。
因此,需要定期更新目标模型,以确保跟踪的准确性。
这可能涉及到在线学习或模型适应的技术。
终止条件:跟踪可以在达到某些终止条件时结束,例如目标不再可见、跟踪失败或用户停止跟踪。
在终止时,系统可能会输出跟踪结果或汇总目标的轨迹信息。
"Tracking by Segmentation" 方法的优点是它能够处理目标在复杂背景下的跟踪,并且对目标的外观和形状变化相对鲁棒。
然而,它也面临着挑战,例如遮挡、光照变化、目标形状变化等问题可能会导致跟踪失败。
使用计算机视觉技术进行对象追踪的技巧与步骤
使用计算机视觉技术进行对象追踪的技巧与步骤计算机视觉技术正在变得越来越普遍和重要,其在许多领域的应用不断增加。
其中之一就是对象追踪,这是一种通过计算机视觉技术来跟踪并识别视频中的特定对象的方法。
对象追踪可以在许多领域中发挥作用,例如视频监控、自动驾驶和增强现实等。
本文将介绍使用计算机视觉技术进行对象追踪时的一些技巧和步骤。
首先,对象追踪需要使用适当的算法和技术来实现。
以下是一些常见的计算机视觉技术用于对象追踪的算法:1. 卡尔曼滤波算法:卡尔曼滤波是一种用于估计状态的算法,它通过融合传感器数据和物体运动模型,能够有效地跟踪对象的位置和速度。
2. 基于深度学习的方法:深度学习技术在计算机视觉中取得了巨大的成功,其中包括对象追踪。
一种常见的方法是使用卷积神经网络(CNN)来提取图像特征,并使用循环神经网络(RNN)或长短期记忆(LSTM)来跟踪对象。
3. 目标检测与跟踪融合:目标检测是识别图像中的特定对象的算法,而目标跟踪是在视频序列中跟踪该对象。
将这两个任务结合起来,可以实现更准确和稳定的对象追踪。
除了选择合适的算法和技术之外,还需要遵循一些步骤来实现对象追踪:1. 数据收集:首先,需要收集包含所需对象的视频数据。
这些数据应尽可能覆盖对象在不同场景下的不同运动情况,以便训练和测试算法的准确性和稳定性。
2. 数据预处理:在训练和测试之前,需要对收集到的数据进行预处理。
这包括去除噪声、调整图像大小和分辨率等操作,以提高算法的性能。
3. 特征提取:在对象追踪中,选择适当的特征对算法的性能至关重要。
一种常见的方法是使用卷积神经网络(CNN)来提取图像特征,或者使用手动选择的特征(例如颜色、纹理等)。
4. 训练模型:一旦收集到足够的数据并提取了适当的特征,就可以使用这些数据来训练对象追踪模型。
训练的目标是使模型能够准确地预测对象的位置和运动。
5. 测试和评估:完成模型的训练后,需要对其进行测试和评估。
将模型应用于实际视频数据,并与真实对象位置进行比较,以评估其准确性和稳定性。
运动跟踪教程 Adobe Premiere Pro物体实时跟踪
运动跟踪教程:Adobe Premiere Pro物体实时跟踪运动跟踪是视频编辑中常用的技术之一,它可以让我们在Adobe Premiere Pro软件中追踪某个物体的运动轨迹,并在后期编辑中给其添加特效或替换内容。
本教程将教你如何使用Adobe Premiere Pro实现物体实时跟踪。
步骤1:导入素材首先,打开Adobe Premiere Pro软件并创建一个新的项目,在项目面板中导入你需要进行运动跟踪的视频素材。
步骤2:创建新的序列在程序面板中,右键点击素材,选择"新建序列"。
在弹出的对话框中,填写序列的名称和设置序列的属性,如分辨率和帧率。
点击"确定"创建新的序列。
步骤3:打开运动跟踪窗口在菜单栏中,选择"窗口" -> "基本" -> "运动",打开运动跟踪窗口。
步骤4:选择跟踪对象在时间轴中找到要进行运动跟踪的片段,将播放头拖动到片段的起始位置。
然后,在运动跟踪窗口中,点击"跟踪对象",在编辑器中选择你要跟踪的物体。
步骤5:设置跟踪区域在运动跟踪窗口中,点击"设置跟踪区域",调整矩形框的大小和位置,将其覆盖在要跟踪的物体上。
确保选取的区域包含了整个运动轨迹。
步骤6:开始跟踪点击运动跟踪窗口中的"分析"按钮,开始进行物体的运动跟踪。
Premiere Pro将自动分析视频中的物体运动,并生成关键帧轨迹。
步骤7:调整跟踪结果分析完成后,你可以在运动跟踪窗口中查看跟踪结果。
如果跟踪不准确,可以通过调整跟踪区域或修改跟踪参数来改善跟踪效果。
点击"应用"按钮,将跟踪结果应用到视频素材中。
步骤8:添加特效或替换内容跟踪完成后,你可以在主程序面板中进行后期编辑。
你可以通过在视频素材上添加效果、遮罩或替换内容,使物体看起来与背景更加融合。
一种视频图像序列中运动对象的分割与跟踪算法
立前 帧感兴趣 运 动对 象与 当前帧 中各运 动对 象的 帧 间向量来跟 踪 当前 帧 中感 兴趣 的视 频对 象。 验 结 果表 明 ,该 算 法可行 ,而且 由 于该算 法 简单 、计算 复杂度 小 ,能很 好地 满足 实时监 控 系统
中 对感 兴趣运 动对 象的提 取 与跟 踪 。
键词:图像分割;边缘检测;跟踪算法;运动对象 关
由 图分 类号 :T 3 P 9 l
文献 标识码 :A
M e h d f r s g e t ton an r c i f t o o e m n a i d t a k ng o
mo igo jcs nvd osq e cs vn bet i ie e u n e
文献… 采用形态学和运动预测模型来进行分割 , 依次完成特征提取、 特征匹配和运动分析 3 个步骤。h m To a s 等提 出的 分割算 法是 基于 模 式识 别和 对象跟 踪技 术 , J在视频 对象运 动量 较 大时 也能 达到较 好 的分割 效果 。
另外 ,视 频场景 中往 往存 在 多个运 动 对象 ,我们 只对其 中一个 或 几个运 动 对象感 兴趣 ,因此需 要对 感兴趣 的运 动对 象进行跟 踪 。传统 的跟踪 方法 通常 使用 K l n滤波 器或者 条 件概率 来 计算 和预 测刚 体 目标 的运 ama 动 。在运动 对象 被遮 挡和 发生 变 形的情 况 下 ,这 种跟踪 方法不 利于 视频 运动 对象 的 实时跟 踪 。 】
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浙江太学学报(工学版)湖址:www.journals.茹j¨.edu.cn/eng
作者简允:孙志海(198卜一)。男,福建漳州人.博士生。主要从褰视频运动对象分割的研究。E—mail#ees抽@163.com
透承联系人i寒善安,男,教授,媾导。E.mail;∞a@o鼢.霹u.e矗u。cn
万方数据
浙 江 大 学 学 报(工学版>
频运动对象努裁浆算法,毽褫蓑运凄薄象惠囊分割 的闻题还没完全薪决。实时自动分箭视频语义对象 的难点有:对复杂场景快速准确的背景建模;环境变 化及噪声影响算法的鲁棒性;算法通用性夔,复杂 斡分割算法潢是不了应鼹酶实畦性要求;多运动对 象戆分割及鼹踪》73对分割算法挺毒了更离酌要求.
收藕日期:2007一04r 27.
(3)
式中:系数a影响着背景缓存平滑滤波的程度及更 新的速度,a取值区间为[o,1].根据经验,取值在 [o.05,o.1]区间时背景更新效果较好.一般以获取 的第一帧图像作为初始背景. 2.2变系数空域滤波
根据背景差技术可以快速地区分前景(视频运 动对象)和背景区域的特点,将当前帧厂(z,y,以)与 更新所得背景B(z,y,“)相减得背景差图,记为
Abs薯ract:Effec毫ive background was modeled by accl王mlllative赫ame-to—frame differenees,and foreground could be extracted using background subtraction operation. A Variable coefficient 8patial“lter was presen。 ted,which could effectively enhance the backgfound subtraction ilnage and make the foreground region has 猕ueh蕊of£spa专i教l e。n娃eetivity.An i轻lprpved Ots醢一b程se矗seglne曹妓a皇io珏fnetho矗w毅s pres£nt矗to 8ce醢ri睦ely 毛hreshol矗t}捷backg#ound鑫iffere狂ee iznage。 Morphoiogieal oper氇tio芏1 was used in extl|aeting con毒ours o{ moving objects. After getting the contours of moVing objects,region growing segmentation method was applied to locate the foreground region,and the rectangle centre w杜s seen as the n18ss centre of the moVing o逆eets。奈压oving o毽ects were tr8eked usi珏g minim鑫l Euclidean distanee and the擞otion tr面ec童ories were also p鑫i狂重ed+ Experi£nental芏}es娃lts sho、酽e建专h鑫专prop。se建曩lg。rithl致was e|壬£e专iVe an纛effieient. Key words:moving object segmentation;moving object tracking;difference accumulation;spatiaI filte。
Bd(z,y,“)=l/(z,y,“)一B(z,了,“)I. (4) 从试验结果来看,如果直接对B。(z,3,,“)进行 二值化操作,所获得的视频对象平面大多具有空域 不完整特性,所以需对背景差图像进行空域滤波, 使视频对象平面保持空域连通性.常见空域滤波器 有均值滤波器、中值滤波器及拉普拉斯滤波器等, 但这些滤波器均有其各自的适用场合,直接采用某 种滤波器对背景差图像进行滤波并不一定能获得理 想的效果.建立在对以上这几种滤波器滤波效果分 析的基础上,本文给出了一种新型的变系数空域滤 波器(variable coefficient spatial filter,VCSF)掩 模.考虑有意义掩模的最小尺寸为3×3,图2显示 了变系数空域滤波器掩模的两种形式,其中叫为待 整定的系数,取值为硼≥1,当叫一1时,该滤波器 即还原为常规的均值滤波器.
ring;background update
视簇运囊辩象分割及蹉踩缝子繁个巍觉鉴撬系 统的最底层,是各释后续高级处璩辩视频分橱“j、 视频编码[2]、视频梭索c3]以及视频艘控H1等的基础. 运动附象分割是指从视频流中实时提取出运动对 象,蒋运费对象鼹踪剃是指对嚣糠遴行连续的跟踪 叛确定萁运囊孰迹.尽管文献[5~?3报道了有关视
飓啪啪一滢篡班。吖b’弩川Ⅺ,
(1)
fD(z,y,如一1)+1,F(z,岁,‘打)=
D(搿,y,如)一{ o,D(z,y,以一1)<A,
(2)
}0,其德。
式(2)表示当菜位警像素的帧间羞异较小时,使
D(搿,y,“)加l,否则D(z,了,“)赋值为O,表示该
像素的帧间差异比较大,|;【记录每个像素差异积累
2视频运动对象分割
2。l 自逶庭鹜豢建模 设有M帧视频序列,(z,y,£t),厂(z,∥,如),
…,,(z,y,£M),取,(z,3,,£,)为基准图像,则一幅 差异积累图像是由将基准图像和视频序列膀续图像 进行怼毙褥到的[1”.当基准匿像蠢序甍中图像之 间在某个像素位置上出现一次较小差异就令计数器 计数一次,这种计数器在差异积累图像每个像素的 位置上都有一个.当第矗帧图像与基准图像相比较
Bailo等人[83从算法实时性角度出发,利用高斯分 布特性构建趱适应背景更新模型,实现了对视频运 动对象的分裁,貌类算法需要信计镜头嗓声或静止 背景中由噪声所引起的方差,算法自适应獠度较不 理想.Yang等人[90利用视频像素水平及帧水平特 性有选择地更新背景模型,然后采用形态学后处理 方法对税簇运羲对象送行分割,该算法对瑟豫 RGB颜色空间的三维数据均进行了处理,当视频 窗口变大时,算法处理速度成倍下降,影响实时 性.Chen等人[10]提出了一种采用背景记泶技术恢 复背景区域,结合背景差穗邻帧差信息分割裰频运 动对象的算法,该算法魏采没有准确酶前景物俸分 割,背景记泶技术得到的背景信息则不可熊,反而 影响了下一帧运动对象分割的准确性.
第42卷第9期 2∞8年9月
浙 江 太 学 学 报《工学版)
Journal of Zhejiang University(Engineering Science)
l×){:10。378S/j,issn。i¥08—973X。2008.O§,03e
V01,42 No.9 辍p.2008
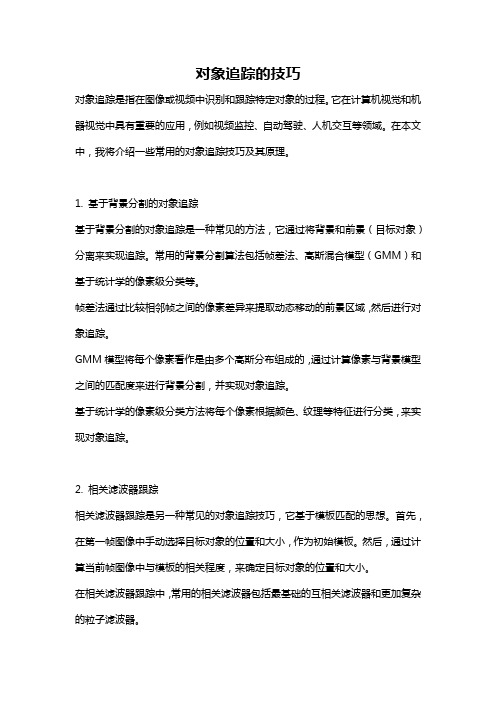
多视频运动对象实时分割及跟踪技术
万方数据
第9期
孙志海,等:多视频运动对象实时分割及跟踪技术
的深度.设当前背景的更新模型为B(z,y,“),则 当D(z,y,“)积累至A值时(其中A>o),相应位置 的背景像素值可根据式(3)进行自适应更新,对 D(z,y,如)为。的点则不更新背景像素值,保持原 背景像素值不变. B(z,y,£^)一口·厂(z,y,“)+(1一口)·B(z,y,“一1)
孙志海,朱善安
(浙江大学电气工襁褥鑫逶建费景建横,采惩背景差鲶方涟梭弱鬟凝运动砖彖医壤。设{中了一释变
系数豹空域滤波器,有效建对鹜爨戆霸豫送行了增强,使获褥豹褪频避动对象透蠛更舆有空域连通籍馁。绦出了
一种改进的基于()tsu法的自适应湖傅化方法,能剪准确地对背景差蹦像进行阈值化.莱闱形态学边界提取技术
图1 多视频落幼对象实时分割及跟踪技术框架
Fig.1
Frame of rea卜time segmentation and tracking 专eehn遗硅e of嚣l娃ltiple拍oving o玛ects in video se一
时,差异积累图像巾一个给定像素的输入项给出在 此位置上对应的像素与基准图像中同一位置的像素 闯灰囊级变化的次数。蘧羞时闻懿簧耨,差异积累 图像可视为一个像素值在动态更新的矩阵D(。,y, 缸),差异大小是根据某阈值Tf设定好的.如取第 愚一r帧图像,(z,∥,“一,)为求取蒺异积累图像的参 考帧,刘当前帧,(。,∥,改)与参考帧,(z,了,如一,) 之闺的差异图像F(z,了,岛)戳及差异积累囊态矩 阵D(工,y,如)分别如式(1)、(2)所示,通过分析羡 异积累动态矩阵来决定某像素属于前景或背景:
中图分类号:TP391.41
震献标识码:A
文章编嚼:1008—973X(2008)09—1631一05
Real一量耋I麓e segl魏e娃垂a鼍io珏and 耄r鑫cki鼗g耄echniq珏e Of薹nultiple
ln◇Ving o喵ee惦 i珏Video seql重e珏ce
SUN Zhi—hai,ZHU Shan—an tcolleg毫。f E}£ctrie馥t E豫g该eeriAg,zh鲤;i鼢g U锋i暂ersit》,H叠携gz}m鞋3气QQ:弧,Chi戳)
形式很适用于对背景差图像的滤波. 在使用滤波器之前需先整定叫值,这里铷的
整定可采用两种方法:一是直接观察对应系数滤波 图像阈值化后的效果;二是根据最大类间方差的原 理,比较不同叫系数下滤波图像在特定阈值下的类 间方差[1 2|,从而整定似值.
图3为对MATLAB提供的Viptraffic视频测 试序列(160×120,15帧/s)的第68帧图像采用不 同空域滤波器及阈值化后的效果示意图.为了更有 效地进行比较,所选择的视频帧里含有一辆黑色的 车辆,其与背景的对比度明显不如视窗里的白色车 辆.从图3(d)可以看出,直接对第68帧的背景差 图像进行阈值化,其运动对象平面内部存在比较多 的空洞,特别是黑色车辆,这将直接影响视频运动 对象下一步的分割定位;在图3(e)中,由于均值滤 波器的平滑效果,视频运动对象即三辆小车的内部 空洞面积相比图3(d)有所减小;从图3(f)可看出复 合拉普拉斯滤波操作不但没有减少空洞区域,反而 增加了背景差图像的高频分量;图3(g)则为采用 VCSF滤波器的效果,其视频运动对象的空域连通 性对进一步分割定位非常有利.