人机系统功能分配方法研究
电动车毕业设计

第一章概述1.1设计的主要目的和意义此次设计的目的是掌握产品造型的设计,包括材料、尺寸的合理选择,灵活运用制作技术、形态表达语言,根据人机工程学和美学来设计电动自行车的尺寸和颜色。
根据同类型产品的类比和设计,力学分析,考虑人机工程学中的人体尺寸和人的舒适程度来综合设计电动自行车的尺寸。
设计的目的其实包括好几个层面,第一,加工工艺的了解;第二,进一步提出不同材质的优化组合课题;第三,探究材料与产品结构、功能的有机联系;第四,熟悉产品结构连接件的运用;第五,产品形态讨论;第六,寻求产品设计制作的个性化等等。
通过这半年的设计,我们很好的复习了已经学过的课程,并对部分材料的应用有了一定了解,在颜色搭配上也有了一定的学习,而且能熟练操作制图软件和办公软件。
对我们以后在工作上有很大的帮助。
1.2国内外电动自行车的发展情况为创造市场需要,适合老弱妇孺各种年龄层骑乘自行车,国外厂商多年前即开始研制辅助驱动自行车并且在新电池和驱动机械马达技术成熟发展之下,电动自行车应运而生。
海外发展较早的要数日本、奥利地、德国、台湾等国家和地区,近几年美国发展也比较快。
国外的电动自行车主要是作为一种轻松代步及休闲健身工具。
例如,在大型的停车场、超市和旅游区里使用。
从1994到1999年6年时间中,全球电动自行车数量,从 3.6万辆剧增1600万辆,如按2嘛,电动车需要量会在30万辆以上。
同时,东南业、中东、印度增到50万辆,而在2000年,仅日本就需要50万辆。
总体来说,电动自行车在全球的潜在市场很大,并呈上升趋势。
日本电动车的生产及技术都占世界领先地位,商品化的电动自行车由日本雅马哈公司率先于1994年推出,并随着本田、三洋、松下等知名公司的参与,生产规模日益放大。
但日本对电动自行车的使用管理上采取了严格限制,日本只许智能型电动自行车上路,并对智能型电动自行车的要求制定了很严格规定。
具体有:在任何路况情况下,速度小于15km/h时,人力:电助力大于等于1,即电助力不允许大于人力,但电助力接近于人力;在任何路况情况下,速度大于15km/h时,速度每增加1km/h,电助力下降1/9;速度小于等于24km/h时,整车电助动系统关闭;人力蹬踏开始后1秒钟之内,电助动系统按上述开始要求工作:人力蹬踏停止后l秒钟之内,整车电助动系统关闭;为了节约电能,智能型电助自行车停止运行一定时间(一般为3 一5分钟)后,整车处于休眠状态。
安全人机选择题库
安全人机选择题库1.人机工程学的进展大致经历了这样的一个过程,即:( C )。
A.以人类为中心——以机械为中心——人机系统环境协调——以系统为中心B.以机械为中心——以系统为中心——以人类为中心——人机系统环境协调C.以机械为中心——以人类为中心——以系统为中心——人机系统环境协调D.以人类为中心——以系统为中心——人机系统环境协调——以机械为中心2.手臂的最大推力产生在肩的上方0。
方向上,可达自身体重的( C )。
A.50%B.80%C.130%D.150%3.颜色对比与人眼辨色能力有一定关系。
当两种颜色相配在一起时,易于辨认的顺序是( A )。
A.黄底黑字,黑底白字,蓝底白字,白底黑字B.白底黑字,黑底白字,黄底黑字,蓝底白字C.黄底黑字,白底黑字,黑底自字,蓝底白字D.白底黑字,黄底黑字,黑底白字,蓝底白字4.站着不动、长期或者经常重复地弯腰、躯干扭曲并倾斜的姿势、经常性重复地单腿支撑的姿势与手臂长时间前伸等姿势极易产生疲劳。
其原因要紧是( D )。
A.动态作业B.动作力量过大C.动作幅度过大D.静态作业5.人们常常在伸手取物时直接将手伸向物品,在穿越空地时走斜线,为图省事直接从有限高度的设备或者货物堆上翻越而过等。
这在人机工程学上被称之( A )。
A.捷径反应B.躲避反应C.积极反应D.消极反应6.人眼观看展示物的最佳视角在地域标准视角(C )区域内。
A.5 B.15 C.30 D.457.利用人体参数进行作业空间设计时,由于设计目标用途不一致,选用的百分位与习惯度也不一致。
凡通道宽度类设计,通常取(D )百分位数据。
A.1 B.10 C.90 D.998.显示器(显示装置)是从机器至人的信息传递装置,视觉显示器由于传递的信息量大、传递方式多样等原因,获得了最广泛的应用而占要紧地位。
视觉显示器可分为数字式与模拟式两类。
关于数字显示方式的特点的描述,下列说法中错误的是( C )。
A.动态范围大B.读数准确C.定性显示D.定量显示9.人机功能分配研究的意义是:利用人与机器的特点,为作业中的人与机器,安排不一致的任务形式、难度与任务量。
飞机驾驶舱自适应功能分配方法

飞机驾驶舱自适应功能分配方法
毕晨灿;高飞
【期刊名称】《民用飞机设计与研究》
【年(卷),期】2024()1
【摘要】对于诸如飞机驾驶舱等复杂人机系统,自适应功能分配能实现动态变化下的人机协作方式,使人、机更加协同完成功能,提高系统整体的效能。
提出了一种飞机驾驶舱自适应功能分配的方法,该方法采用贝叶斯网络预测当前情境下各个可行的自动化等级的绩效指标,然后基于多属性风险决策来综合所有绩效指标得到最合适的自动化等级。
实例表明该方法具有很好的可操作性和灵活性,能为飞机驾驶舱功能分配提供技术支撑。
【总页数】6页(P73-78)
【作者】毕晨灿;高飞
【作者单位】太原理工大学;山东交通学院
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于CTL模型和任务绩效的驾驶舱动态功能分配方法
2.作战飞机人机功能分配方法
3.基于遗传BP神经网络的飞机驾驶舱人机功能分配方法
4.基于负荷均衡的飞机驾驶舱动态功能分配
5.基于蒙特卡洛-自适应差分进化算法的飞机容差分配多目标优化方法
因版权原因,仅展示原文概要,查看原文内容请购买。
人机工程
1.肌肉疲劳试验:1884年,德国学者莫索(A·Mosso)对人体劳动疲劳进行了试验研究。
对作业的人体通以微电流,随着人体疲劳程度的变化,电流也随之变化,这样用不同的电信号来反映人的疲劳程度。
这一试验研究为以后的“劳动科学”打下了基础。
2.铁锹作业试验:1898年美国学者泰勒(F·W·Taylor)从人机学角度出发,对铁锹的使用效率进行了研究。
他用形状相同而铲量分别为5kg、10kg、17kg、和30kg四种铁锹去铲同一堆煤,虽然17kg和30kg的铁锹每次铲量大,但实验结果表明,铲煤量为10kg的铁锹作业效率最高。
他做了许多实验,终于找出了铁锹的最佳设计和搬运煤屑、铁屑、砂子和铁矿石等松散粒状材料时每一铲的最适当的重量。
这就是人机工程学过程中著名的“铁锹作业实验”。
3.砌砖作业试验: 1911年吉尔伯勒斯(F·B·Gilreth)对美国建筑工人砌砖作业进行了试验研究。
他用快速摄影机把工人的砌砖动作拍摄下来,然后对动作进行分析,去掉多余无效动作,最终提高了工作效率,使工人砌砖速度由当时的每小时120块提高到每小时350块。
4.人机工程学的发展:起源于欧洲,形成与美国,发展于日本。
经验期:以人适应机器为中心创建期:以机器适应人为中心成熟期:人机协调5.人机工程学的研究范围(1.研究人机系统中人的各种特性:人的生理特性和心理特性(2.研究人机功能合理分配:人和机各自的功能特性参数,适应能力和发挥其功能的条件,各种人机系统人机功能分配的方法等。
(3.各种人机界面的研究:人机在信息交换或功能上接触或互相影响的领域。
(4.作业方法与作业负荷研究:包括作业的姿势、体位、用力、作业顺序、合理的工作器具和工卡量具等的研究,目的是消除不必要的劳动消耗。
(5.作业空间的分析研究:包括人的最佳视区、最佳作业域、最小的装配作业空间以及最低限度的安全防护范围等。
(6.事故及其预防的研究:既是安全人机工程学的立足点,也是其根本目的,即应研究产生事故的各种人的因素、人的操作失误分析与预防措施等。
安全人机工程学-2-人机系统

过程 控制
机器
输出
2.2 人机系统类型及功能
按系统自动化程度分类 自动化系统
自动化系统由人和自动化设备构成。机器负责系统中信息的接收、储存、处理和执行等工作; 人只起到管理和监督的作用,只有在发生意外情况时,人才采取强制措施。 系统从外部获得所需的能源,人的具体功能是启动、制动、编程、维修和调试 系统必须对可能发生的意外情况设有预报及应急处理的功能 机 输入 感觉 信息储存 信息处理和决策 人(监视者) 信息储存 感觉 信息处理和决策 动作 动作
物理量的监测范围广,而且精 确;可监测如电磁波等一些人 不能监测的物理量 在力量、速度、精确、操作范 围、耐久性等方面远比人优越 ;对处理液体、气体、粉状体 等比人优越,但处理柔软物则 不如人 按预先编程可进行快速、准确 的数据处理;记忆正确并能长 时间储存,调出速度快;反应 速度快;学习能力较低,灵活 性差
适应性
环境
2.4 人机功能分配
2.4.3 人与机功能分配 人机特性比较 机 成本 器 人
包括工资、福利和教育培训费;如 果万一发生事故,可能失去宝贵生 命 具有特定的动机,渴望在集体中工 作和生活,得到集体保护,否则会 产生孤独感、疏远感,影响作业效 能
包括购置费、运转和保养维修 费;一旦出现事故,也只失去 机器本身价值
2.4 人机功能分配
2.4.3 人与机功能分配 人机特性比较 机 监测 器 人
具有与认知直接联系的监测能力, 凭感官接收信号,掌握标准困难, 易出错;具有味觉、嗅觉和触觉 肢体具有许多自由度,可在三维空 间进行多种运动,可进行微妙的协 调,但人的力量、速度有限;可通 过获取视觉、听觉、位移和重量等 信息控制运动器官灵活地操作 具有抽象、归纳能力以及模式识别 、联想、发明创造等高级思维能力 ;善于积累经验并运用经验判断; 记忆力有限;需要反应时间;具有 很强的学习能力,灵活性强
车辆人机工程学ppt课件

车辆 人 机 病原体侵入机体,消弱机体防御机能,破坏机体内环境的相对稳定性,且在一定部位生长繁殖,引起不同程度的病理生理过程
工
程
学
百分位数
百分位数Pk将随机变量的总体或样本 的全部观测值分为两部分,有k%的观测 值等于和小于它,有(100- k) %的观测值 大于它。
百分位数是一种位置指标、一个界值。 人体尺寸用百分位数表示时,称人体 尺寸百分位数。
工
程
学
1.4 人机工程学的发展史
➢ 人机学的萌芽期:
《考工记》:“凡兵无过三其身。过三其身,弗能用也,而无己, 又以害人。”“故攻国之兵欲短,守国之兵欲长。”“凡兵,句 兵欲无弹,刺兵欲无蜎,是故句兵椑,刺兵抟。”“凡为弓,各 因其君之躬志虑血气。丰肉而短,宽缓以荼,若是者为之危弓, 危弓为之安矢。骨直以立,忿埶以奔,若是者为之安弓,安弓为 之危矢。”
车辆 人 机 病原体侵入机体,消弱机体防御机能,破坏机体内环境的相对稳定性,且在一定部位生长繁殖,引起不同程度的病理生理过程
工
程
学
“人机工程学” ➢ Ergonomics (欧)/工效学、人类工效学 ➢ Human Engineering(美)/人体工程学 ➢ Human Factors Engineering /人因工程学、人因学 ➢ Human Factors (美) /人因工程学、人因学 ➢ 人间工学(日) ➢ 工程心理学 ➢ 人机工程学、人机学、
车辆 人 机 病原体侵入机体,消弱机体防御机能,破坏机体内环境的相对稳定性,且在一定部位生长繁殖,引起不同程度的病理生理过程
工
程
学
人-机关系
➢ 人机系统功能分配研究:系统中人的功能与机
的功能之间的联系和制约条件,研究人、机之 间的功能分配方法。
安全人机工程-ch04安全人机功能分配

三、人机特性比较:人机特性从11各方面进行了比较。
“人机共存(同工)” 对人机共存的人机系统来说,设计的主要困难不在于产
品本身,而在于是否能找出人与技术之间最适宜的相互联
系的途径与手段,在于是否能全面考虑到操作者在人机系 统中的功能作用特点和机器与人的特性相吻合的程度。
《安全人机工程》
《安全人机工程》
《安全人机工程》
四、人机功能分配 1.人机功能分配的含义
定义:对人和机的特性进行权衡分析,将系统的不同功能恰当地分配
给人或机,称为人机功能分配。
进一步解释:人机功能分配就是通过合理地分配功能,将人与机器
的优点结合起来,使人体特性与机器特性做到合理匹配和互补,从而构
成高效与安全的人机系统。从安全的角度,人机匹配主要解决的问题:
应激反应,导致重大事故的发生。 • 进行合理的人机功能分配,也就是使人机结合面布
置恰当,就需要从安全人机工程学的观点出发分析
人机结合面失调导致工伤事故的原因,进而采取改 进对策。
《安全人机工程》
④人机分工不合理的表现
• 可由人很好执行的功能分配给机器,而把设备能更有效
地执行的功能分配给人; • 让人所承担的负荷或速度超过其能力极限; • 不能根据人执行功能的特点,而找出人机之间最适宜的 相互联系的途径和手段;
即①显示器与人的信息感觉通道特性的匹配;②控制器与人的运动反应 特性的匹配;③环境条件与人的生理、心理及生物力学特性的匹配等。
必须树立人机结合的理念,机器设计环节必须同时考虑人与机器两方面
因素,即在机器设计的同时把人看成有知觉有技术的控制机、能量转换 机、信息处理机。机器设计同工作设计(含人员培训、岗位设计、动作
《安全人机工程》
人机系统在机器人应用中的研究综述

的 输 入 信 息 ; 另 一 方 面 为 人 的 输 入 信 息 。 随 着 科 学 技 术 的 进
步 ,人 机 系 统 以 及 人 机 交 互 技 术 也 得 到 了深 入 的 研究 与发 展 。 人 机 工 程 学 是 运 用 生 理 学 、 心理 学 和 医 学 等
Y A NG D o n g ,L I T i e - j u n ,L I U J i n - y u e
( 河北 工业 大学,天 津 3 0 0 1 3 0 ) 摘 要 :针对人机 系统 的发展 、分类以及特点进行 了概述 ,并对人机 系统主要的研究热点—— 人机交互
计 中 。例 如 , 冲 压 机 床 上 设 计 的 双 手 控 制 按 钮 ,
提 高 了设 备 操 作 的 安 全 性 ; 载 人 车 辆 要 根 据 人 体 动 力 学建 立 整 个人 机 系统 的 动 力 学模 型 , 以 满足 更 高 的性 能 要 求 。科 技 水 平 的发 展 ,要 求 产 品设 计 过 程 中需 要 根 据 人 机 工 程 学 、人 体 动 力学 设 计 人机 交互 接 口 。 人 机 系 统 中人 机 直 接 进 行 信 息 交换 的 界 面 称 为 人 机 界 面 , 是人 机 交互 的 一种 常 用形 式 。人机
O o i : 1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 0 3 ( 上) . 2 6
0 引言
人机 系统( Ma n — Ma c h i n e S y s t e m) 是 由相 互 作
用 ,相 互 联 系 的人 与机 器 两 个 子 系统 构 成 的 , 能 实 现 特 定 功 能 并 完成 目标 任 务 的一 个 整 体 系统 。 人 机 系 统 是 一 个 多学 科 交 叉 的边 缘 科 学 ,它 涉 及 到 生 理 学 和 心 理 学 、行 为 科 学 、认 知 科 学 、人 类 工程 学、控制论、信息论、系统论、决策科学 、 知 识工程和计算机科 学等学科u 。钱 学 森 在 1 9 9 1 年 初 曾指 出 “ 我 们 要研 究 的 是 人 与 机 器 相 结 合 的 智 能 系 统 ,不 能 把 人 排 除 在 外 , 是 一 个 人 机 智 能 系统 嵋 ’。美 国 学 者L e n a t 和F e i g e n b a u m在 同年
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.5
0.3
% %
%
""#0.6
0.3
0.5
%% &
""#0.3
0.6
0.5
%% &
""#0.3
0.7
0.5
%% &
!"0.5
0.3
0.3
$ %
!"0.5
0.7
0.3
$ %
!"0.5
0.9
0.5
$ %
"
%
"
%
"
%
R4
=
""0.7
"
0.5
0.5
R%
% %
5
=
""0.3
"
0.5
0.1
R%
% %
6
=
""0.1
验, R1 ̄R6 及 R 均为模糊一致判断矩阵。
2.4 单一准则下方案的优度值
根据模糊一致判断矩阵的元素与权重的关系式给出的排
序方法[2,5], 即:
i=1, 2, …, n k=1,2,…, m ( 1)
式中: α—满足 α’ n- 1 的参数。 2
在对模糊一致判断矩阵的几种排序公式中, 上式( 1) 分辨 率最高, 再加上该式有可靠的理论基础, 因此在实际应用中采用 上式对模糊一致判断矩阵进行排序, 有利于提高决策的科学性, 避免决策失误[6]。计算方案 Ci 在目标准则 Bk 下的优度值 wik 式( 1) 中 α=( 3- 1) /2=1
( 2 西安建筑科技大学 机电学院, 西安 710055)
Re s e a rch on function a lloca tion of ma n- ma chine s ys te m
YANG Hong- gang1, ZHU Xu- zhang1,2, LI Dong2, GUO Jin- ping1 ( 1Department of Safety Engineering, Xi'an University of Architecture & Technology, Xi'an 710055, China) ( 2Mechanical & Electrical College, Xi'an University of Architecture & Technology, Xi'an 710055, China)
述, 可以采用如下 0.1 ̄0.9 标度给予数量标度。
表1 0.1- 0.9 数量标度
标度 0.5 0.6 0.7 0.8 0.9 0.1, 0.2, 0.3, 0.4
定义 同等重要 稍微重要 明显重要 重要的多 极端重要
反比较
说明 两元素相比较, 同等重要 两元素相比较, 一元素比另一元素稍微重要 两元素相比较, 一元素比另一元素明显重要 两元素相比较, 一元素比另一元素重要的多 两元素相比较, 一元素比另一元素极端重要 若元素 Ci 与元素 Cj 相比较得到判断 rij, 则元 素 Cj 与元素 Ci 相比较得到的判断为 rji=1- rij
汽轮机叶片并联抛光机系统的研究
- 153-
何克红 戴惠良 卢春强( 东华大学, 上海 201620)
The s tudy of pa ra lle l polis hing ma chine tool s ys te m for turbine bla de
HE Ke- hong, DAI Hui- liang, LU Chun- qiang( Donghua University, Shanghai 201620, China)
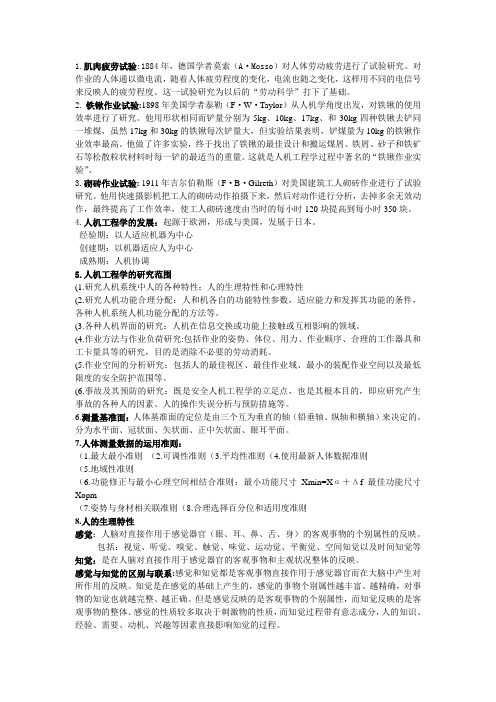
确定人机系统功能分配最优方案需要考虑的指标主要有: 支 持 费 用 、作 业 效 率 、乘 员 安 全 、对 完 成 任 务 需 要 的 特 殊 要 求 、采 取人工控制比 自 动 控 制 的 优 越 性 以 及 操 作 负 荷 等[4]。 针 对 载 人 航天器复杂人机系统座舱内装置、仪器运行状态的监视这一操 作功能的分配方案目标指标, 建立如图 1 所示的多层次的递阶 结构模型。
其对于准则的优度, 并按事前规定的标度定量化, 建立模糊互补 矩阵。
( 3) 一致性检验。对第二步所得的模糊互补矩阵进行一致 性检验, 将模糊互补矩阵转化为模糊一致判断矩阵。
( 4) 计算单一准则下方案的优度值。这一步要解决在准则 Bk 下, n 个方案,C1,C2,…,Cn , 对于该准则优度值的计算问题。
wi1=( 0.2,0.5,0.3) wi2=( 0.5,0.2,0.3) wi3=( 0.533,0.133,0.334) wi4=( 0.2,0.4,0.4) wi5=( 0.334,0.133,0.533) wi6=( 0.467,0.066,0.467) 因素 Bk 在目标层 A 下的优度值 wk: 式( 1) 中 α=( 6- 1) /2=5/2 wk=( 0.18,0.14,0.26,0.1,0.22,0.1)
( 1) 明确问题, 建立一个多层次的递阶结构模型。根据具体 的目标, 全面讨论评价目标的各个指标因素情况, 建立一个多层 次的递阶结构。
( 2) 构造模糊互补矩阵。用上一层次中的每一元素作为下
配是一种新的思路。
一层元素的判断准则, 分别对下一层的元素进行两两比较, 比较
1 模糊层次分析法
层次分析法( AHP) 是将决策总是有关的元素分解成 目 标 、 准则、方案等层次, 在此基础之上进行定性和定量分析的决策方 法。该方法是美国运筹学家匹茨堡大学教授萨蒂于 20 世 纪 70 年代初, 在为美国国防部研究“根据各个工业部门对国家福利的 贡献大小而进行电力分配”课题时, 应用网络系统理论和多目标 综合评价方法, 提出的一种层次权重决策分析方法。这种方法的 特点是在对复杂的决策问题的本质、影响因素及其内在关系等 进行深入分析的基础上, 利用较少的定量信息使决策的思维过 程数学化, 从而为多目标、多准则或无结构特性的复杂决策问题 提供简便的决策方法。但是层次分析法( AHP) 在判断矩阵建立 以 及 判 断 矩 阵 的 一 致 性 检 验 中 存 在 不 足 [2]。
根据上面的数字标度理论, 元素 Ci 和元素 Cj 相对于上一 层元素 B 进行比较, 可得到模糊互补矩阵如下:
!"0.5
0.2
0.4
$ %
!"0.5
0.8
0.7
$ %
!"0.5
0.9
0.7
$ %
"
%
"
%
"
%
R1
=
""0.8
"
0.5
0.7
R%
% %
2
=
""0.2
"
0.5
0.4
R%
% %
3
=
""0.1
"
0.5
0.1
% %
%
""#0.7
0.5
0.5
%% &
""#0.7
0.9
0.5
%% &
""#0.5
0.9
0.5
%% &
!"0.5
0.6
0.4
0.7
0.4
0.7
$ %
"
%
""0.4
0.5
0.7
0.6
0.3
0.6
% %
"
%
"
%
R=
""0.7
"
0.8
0.5
0.9
0.6
0.9
% %
%
""0.3
0.40.10.5源自图 1 多层次的递阶结构模型
2.2 模糊互补矩阵的建立
模糊互补矩阵 R 表示针对上一层次某元素, 本层次与之有 关的元素之间相对优度的比较, 假定上层次的元素 B 同下一层 次中的元素 C1,C2,…,Cn 有联系, 则模糊互补矩阵可表示为:
rij 表 示 元 素 Ci 和 元 素 Cj 相 对 于 上 一 层 元 素 B 进 行 比 较 时 , 元 素 Ci 和 元 素 Cj 具 有 模 糊 关 系“ … 比 … 重 要 得 多 ”的 隶 属 度。为了使任意两个方案关于某准则的相对优度得到定量的描
为了说明 FAHP 这一方法在人机系统功能分配中的应用, 我们以载人航天器复杂人机系统座舱内装置、仪器运行状态的 监视这一较细层次上的操作为例进行功能分配实例分析, 确定 其功能分配的最优方案。
* 来稿日期: 2006- 11- 17
- 152-
杨宏刚等: 人机系统功能分配方法研究
第7期
2.1 确定指标因素, 建立层次递阶结构模型
""""""""""""""""""""$
""""""""""""""""""""$
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%$
中图分类号: TP273+.4 文献标识码: A
目前, 已有的功能分配方法仍以定性分析为主, 人为主观 性比较突出, 特别对于一些复杂人机系统功能分配决策时缺乏 定量分析。将模糊层次分析法( FAHP) 用于人机系统功能分配, 这种用定量计算的方法来进行任务由人或机器来完成的功能分