数学建模作业
数学建模的五次作业

图1中是大学校园一角。
图中标示出道路和两点之间的大致距离(单位:百英尺)。
你的同舍同学说服(convince)你在周末时候在某个道路交叉点(intersections)摆个热狗摊。
你希望小摊尽可能方便同学们。
哪里是最合适的地点呢?表1:校园一角从问题开始问题叙述:假如宿舍位于A,C,D,E和F点,A舍楼有200生,C和D各有300生,E和F楼各有100生。
(1) 如果我们知道A和C是女生楼,D,E和F是男生楼,并且只有30%的女生喜欢在你的小摊上吃热狗,而有80%的男生喜欢吃,那么你的选点会有怎样的改变?(2) 如果B和C点以及E和D点之间的路是上坡路,而上坡路比下坡路难走一倍。
你会怎样选点?A C D E F MAX AVG A 0154017601540176017601320B 660880110088011001100924C 15400220132017601760968D 17602200110015401760924E 15401320110004401540880F 176017601540440017601100G 15401760176066022017601188 A C D E F MAX AVGA04621408123214081408902B198264880704880880585.2C4620176105614081408620.4D52866088012321232541.2E4623968800352880418F528528123235201232528G 46252814085281761408620.4问题分析:问题(1)分析由于学生主要从宿舍到小摊,所以一个方法是算出从每个舍楼到每个可能的小摊地点的距离。
如表1的数据。
列表示所有可能的小摊位置,行表示从宿舍楼到各摊点位置的距离。
同时,在表格中包括了,从舍楼到小摊位置的最大距离和从小摊到舍楼的平均距离。
表1基于表中数据,如果将热狗摊安在B 点,那么没有哪个学生从舍楼到摊点需要走超过500英尺的距离,放在A 点则有学生要走800英尺。
数学建模题目及答案
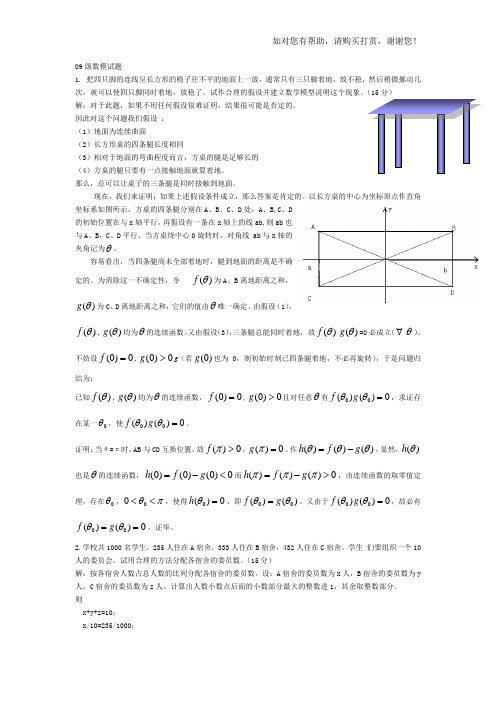
09级数模试题1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。
试作合理的假设并建立数学模型说明这个现象。
(15分)解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。
因此对这个问题我们假设 :(1)地面为连续曲面(2)长方形桌的四条腿长度相同(3)相对于地面的弯曲程度而言,方桌的腿是足够长的(4)方桌的腿只要有一点接触地面就算着地。
那么,总可以让桌子的三条腿是同时接触到地面。
现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。
以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A 、B 、C 、D 处,A 、B,C 、D的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A 、B ,C 、D 平行。
当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。
容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。
为消除这一不确定性,令 ()f θ为A 、B 离地距离之和,()g θ为C 、D 离地距离之和,它们的值由θ唯一确定。
由假设(1),()f θ,()g θ均为θ的连续函数。
又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(∀θ)。
不妨设(0)0f =,(0)0g >g (若(0)g 也为0,则初始时刻已四条腿着地,不必再旋转),于是问题归结为:已知()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存在某一0θ,使00()()0f g θθ=。
证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。
作()()()h f g θθθ=-,显然,()h θ也是θ的连续函数,(0)(0)(0)0h f g =-<而()()()0h f g πππ=->,由连续函数的取零值定理,存在0θ,00θπ<<,使得0()0h θ=,即00()()f g θθ=。
数学建模课后习题作业
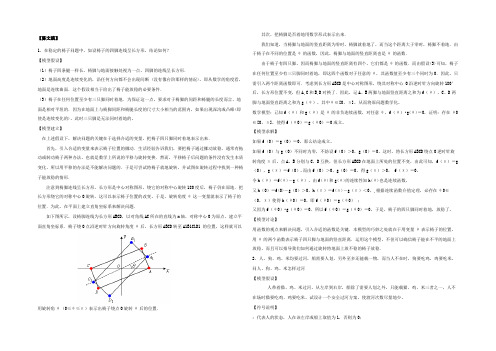
【陈文滨】1、在稳定的椅子问题中,如设椅子的四脚连线呈长方形,结论如何?【模型假设】(1)椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形.(2)地面高度是连续变化的,沿任何方向都不会出现间断 (没有像台阶那样的情况),即从数学的角度看,地面是连续曲面.这个假设相当于给出了椅子能放稳的必要条件.(3)椅子在任何位置至少有三只脚同时着地.为保证这一点,要求对于椅脚的间距和椅腿的长度而言,地面是相对平坦的.因为在地面上与椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的。
【模型建立】在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来.首先,引入合适的变量来表示椅子位置的挪动.生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换.然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的.于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形.注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地.把长方形绕它的对称中心O旋转,这可以表示椅子位置的改变。
于是,旋转角度θ这一变量就表示了椅子的位置.为此,在平面上建立直角坐标系来解决问题.如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系.椅子绕O点沿逆时针方向旋转角度θ后,长方形ABCD转至A1B1C1D1 的位置,这样就可以用旋转角θ(0≤θ≤π)表示出椅子绕点O旋转θ后的位置.其次,把椅脚是否着地用数学形式表示出来.我们知道,当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地.由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数.由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,它们都是θ的函数.而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数对于任意的θ,其函数值至少有三个同时为0.因此,只需引入两个距离函数即可.考虑到长方形ABCD是中心对称图形,绕其对称中心 O沿逆时针方向旋转180°后,长方形位置不变,但A,C和B,D对换了.因此,记A、B两脚与地面竖直距离之和为f(θ),C、D两脚与地面竖直距离之和为g(θ),其中θ∈[0,π],从而将原问题数学化。
数学建模作业及答案
数学建模作业姓名:叶勃学号:班级:024121一:层次分析法1、 分别用和法、根法、特征根法编程求判断矩阵1261/2141/61/41A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦11/2433217551/41/711/21/31/31/52111/31/5311A ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦的特征根和特征向量(1)冪法求该矩阵的特征根和特征向量 程序为:#include<iostream> #include<math.h> using namespace std;#define n 3 //三阶矩阵#define N 20 #define err 0.0001 //幂法求特征值特征向量 void main(){cout<<"**********幂法求矩阵最大特征值及特征向量***********"<<endl; int i,j,k;double A[n][n],X[n],u,y[n],max;cout<<"请输入矩阵:\n"; for(i=0;i<n;i++) for(j=0;j<n;j++)cin>>A[i][j]; //输入矩阵 cout<<"请输入初始向量:\n"; for(i=0;i<n;i++)cin>>X[i]; //输入初始向量 k=1; u=0;while(1){ max=X[0]; for(i=0;i<n;i++) {if(max<X[i]) max=X[i]; //选择最大值 }for(i=0;i<n;i++)y[i]=X[i]/max; for(i=0;i<n;i++)X[i]=0;for(j=0;j<n;j++)X[i]+=A[i][j]*y[j]; //矩阵相乘}if(fabs(max-u)<err){cout<<"A的特征值是 :"<<endl; cout<<max<<endl; cout<<"A的特征向量为:"<<endl; for(i=0;i<n;i++) cout<<X[i]/(X[0]+X[1]+X[2])<<" ";cout<<endl;break;}else{if(k<N) {k=k+1;u=max;} else {cout<<"运行错误\n";break;}}} }程序结果为:(2)和法求矩阵最大特征值及特征向量程序为:#include<stdio.h>#include<iostream>#include<math.h> using namespace std;#define n 3 //三阶矩阵#define N 20void main(){int i,j,k;double A[n][n],w[n],M[n],u[n],W[n][n],max;cout<<"********和法求矩阵的特征根及特征向量*******"<<endl;cout<<"请输入矩阵:\n";for(i=0;i<n;i++)for(j=0;j<n;j++)cin>>A[i][j]; //输入矩阵 //计算每一列的元素和M[0]=0;M[1]=0;M[2]=0;for(i=0;i<n;i++)for(j=0;j<n;j++){M[i]+=A[j][i];}//将每一列向量归一化for(i=0;i<n;i++)for(j=0;j<n;j++){W[j][i]=A[j][i]/M[i];}//输出按列归一化之后的矩阵Wcout<<"按列归一化后的矩阵为:"<<endl;for(i=0;i<n;i++)for(j=0;j<n;j++){cout<<W[i][j]<<" ";if(j==2)cout<<endl;} //求特征向量w[0]=0;w[1]=0;w[2]=0;for(i=0;i<n;i++)for(j=0;j<n;j++){w[i]+=W[i][j];}cout<<"特征向量为:"<<endl; for(i=0;i<n;i++){u[i]=w[i]/(w[0]+w[1]+w[2]);cout<<u[i]<<" "<<endl;}//求最大特征值max=0;for(i=0;i<n;i++){w[i] = 0;for(j=0;j<n;j++){w[i] += A[i][j]*u[j];}}for(i = 0;i < n;i++){max += w[i]/u[i];}cout<<"最大特征根为:"<<endl;cout<<max/n<<endl; }运行结果为:(3)根法求矩阵最大特征值及特征向量:程序为:#include<stdio.h>#include<iostream>#include<math.h>using namespace std;#define n 3 //三阶矩阵#define N 20void main(){int i,j;double A[n][n],w[n],M[n],u[n],W[n][n],max;cout<<"********根法求矩阵的特征根及特征向量*******"<<endl; cout<<"请输入矩阵:\n";for(i=0;i<n;i++)for(j=0;j<n;j++)cin>>A[i][j]; //输入矩阵//计算每一列的元素和M[0]=0;M[1]=0;M[2]=0;for(i=0;i<n;i++)for(j=0;j<n;j++){M[i]+=A[j][i];}//将每一列向量归一化for(i=0;i<n;i++)for(j=0;j<n;j++){W[j][i]=A[j][i]/M[i];}//输出按列归一化之后的矩阵Wcout<<"按列归一化后的矩阵为:"<<endl;for(i=0;i<n;i++)for(j=0;j<n;j++){cout<<W[i][j]<<" ";if(j==2)cout<<endl;}//求特征向量//w[0]=A[0][0];w[1]=A[0][1];w[2]=A[0][2];w[0]=1;w[1]=1;w[2]=1;for(i=0;i<n;i++){for(j=0;j<n;j++){w[i]=w[i]*W[i][j];}w[i]=pow(w[i], 1.0/3);}cout<<"特征向量为:"<<endl;for(i=0;i<n;i++){u[i]=w[i]/(w[0]+w[1]+w[2]);cout<<u[i]<<" "<<endl;}//求最大特征值max=0;for(i=0;i<n;i++){w[i] = 0;for(j=0;j<n;j++){w[i] += A[i][j]*u[j];}}for(i = 0;i < n;i++){max += w[i]/u[i];}cout<<"最大特征值为:"<<endl; cout<<max/n;}运行结果为:2、编程验证n阶随机性一致性指标RI:运行结果:3、考虑景色、费用、居住、饮食、旅途五项准则,从桂林、黄山、北戴河三个旅游景点选择最佳的旅游地。
数学建模一周作业题目
对作业题目的说明1. 本次数学建模周一共提供十五道题目供大家选择。
每支队伍(2-3人/队)必须从以下题目中任意选取一题(只须选择一道),并完成一篇论文,对论文的具体要求参阅《论文格式规范》。
2. 题目标注为“A ”的为有一定难度的题目,指导老师会根据题目的难度对论文最后的评分进行调整。
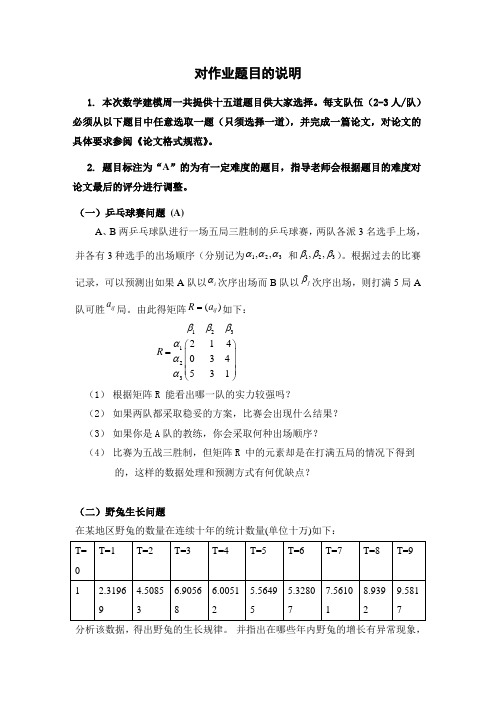
(一)乒乓球赛问题 (A)A 、B 两乒乓球队进行一场五局三胜制的乒乓球赛,两队各派3名选手上场,并各有3种选手的出场顺序(分别记为123,,ααα 和123,,βββ)。
根据过去的比赛记录,可以预测出如果A 队以i α次序出场而B 队以j β次序出场,则打满5局A 队可胜ija 局。
由此得矩阵()ij R a =如下:123123214034531R βββααα⎛⎫=⎪ ⎪ ⎪⎝⎭(1) 根据矩阵R 能看出哪一队的实力较强吗?(2) 如果两队都采取稳妥的方案,比赛会出现什么结果? (3) 如果你是A 队的教练,你会采取何种出场顺序?(4) 比赛为五战三胜制,但矩阵R 中的元素却是在打满五局的情况下得到的,这样的数据处理和预测方式有何优缺点?(二)野兔生长问题在某地区野兔的数量在连续十年的统计数量(单位十万)如下:分析该数据,得出野兔的生长规律。
并指出在哪些年内野兔的增长有异常现象,预测T=10 时野兔的数量。
(三)停车场的设计问题在New England的一个镇上,有一位于街角处面积100 200平方英尺的停车场,场主请你代为设计停车车位的安排方式,即设计在场地上划线的方案。
容易理解,如果将汽车按照与停车线构成直角的方向,一辆紧挨一辆地排列成行,则可以在停车场内塞进最大数量的汽车,但是对于那些缺乏经验的司机来说,按照这种方式停靠车辆是有困难的,它可能造成昂贵的保险费用支出。
为了减少因停车造成意外损失的可能性,场主可能不得不雇佣一些技术熟练的司机专门停车;另一方面,如果从通道进入停车位有一个足够大的转弯半径,那么,看来大多数的司机都可以毫无困难地一次停车到位。
数学建模案例作业
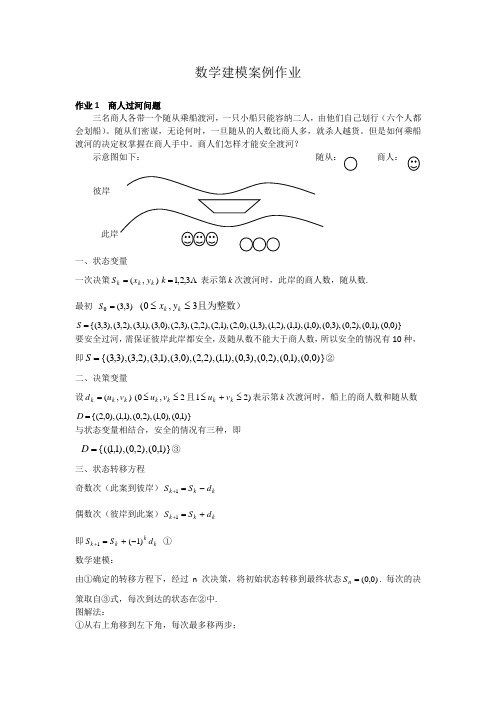
数学建模案例作业作业1 商人过河问题三名商人各带一个随从乘船渡河,一只小船只能容纳二人,由他们自己划行(六个人都会划船)。
随从们密谋,无论何时,一旦随从的人数比商人多,就杀人越货。
但是如何乘船渡河的决定权掌握在商人手中。
商人们怎样才能安全渡河?示意图如下: 随从:商人: 一、状态变量一次决策),(k k k y x S = 3,2,1=k 表示第k 次渡河时,此岸的商人数,随从数. 最初 )3,3(0=S 且为整数)3,0(≤≤k k y x)}0,0(),1,0(),2,0(),3,0(),0,1(),1,1(),2,1(),3,1(),0,2(),1,2(),2,2(),3,2(),0,3(),1,3(),2,3(),3,3{(=S要安全过河,需保证彼岸此岸都安全,及随从数不能大于商人数,所以安全的情况有10种,即)}0,0(),1,0(),2,0(),3,0(),1,1(),2,2(),0,3(),1,3(),2,3(),3,3{(=S ② 二、决策变量设),(k k k v u d =2,0(≤≤k k v u 且)21≤+≤k k v u 表示第k 次渡河时,船上的商人数和随从数 )}1,0(),0,1(),2,0(),1,1(),0,2{(=D与状态变量相结合,安全的情况有三种,即 )}1,0(),2,0(),1,1{((=D ③ 三、状态转移方程奇数次(此案到彼岸)k k k d S S -=+1 偶数次(彼岸到此案)k k k d S S +=+1 即k k k k d S S )1(1-+=+ ① 数学建模:由①确定的转移方程下,经过n 次决策,将初始状态转移到最终状态)0,0(=n S . 每次的决策取自③式,每次到达的状态在②中. 图解法:①从右上角移到左下角,每次最多移两步;②奇数次渡河往左下方,偶数次渡河往右下方。
建立平面直角坐标系如图:n S 过河方案:从A 点)3,3(0=S 出发到D 点)0,0(=n S 结束① 小船一次最多能载两人,所以每次最多移动两个格子② 由此岸即彼岸时人员减少,即奇数遍时向左下方行走;有彼岸及此岸时人员增加,即偶数遍时向右上方行走。
数学建模作业(1)

数学建模作业(1)
数模
数模
1.学校共学校共1000名学生,235人住在宿名学生,人住在A宿名学生人住在人住B宿舍人住在C宿舍舍,333人住宿舍,432人住在宿舍人住宿舍,人住在宿舍.学生们要组织一个10人的委员会人的委员会,学生们要组织一个人的委员会,试用下列办法分配各宿舍的委员数:列办法分配各宿舍的委员数:(1)按比例分配取整数的名额后,剩下的名按比例分配取整数的名额后,按比例分配取整数的名额后额按惯例分给小数部分较大者。
额按惯例分给小数部分较大者。
(2)用Q值方法。
值方法。
用值方法
数模
如果委员会从10人增至人如果委员会从人增至15人,用以上人增至2种方法再分配名额。
将2种方法两次分配种方法再分配名额。
种方法再分配名额种方法两次分配的结果列表比较。
的结果列表比较。
(3)你能提出其它的方法吗?用你的方你能提出其它的方法吗?你能提出其它的方法吗法分配上面的名额。
法分配上面的名额。
数模
2.考察模拟水下爆炸的比例模型.爆炸物质量m,在距爆炸点距离r处设置仪器,接收到的冲击波压强为p,记大气初始压强p0,水的密度ρ,水的体积弹性模量k,用量纲分析法已经得到
p0ρrp=p0(,)km3
数模
设模拟实验与现场的p0,ρ,k相同,而爆炸物模型的质量为原模型的1/1000.为了使实验中接收到与现场相同的压强p,问实验时应如何设置接收冲击波的仪器,即求实验仪器与爆炸点之间的距离是现场的多少倍?
p0,ρ,k。
(完整word版)数学建模作业

结果:
Untitled2
j =
80.1000
b =
9.7106
p =
-0.4682
f =
3.1529
极差:
用z表示极差。
编写M文件:Untitled1.m
x1=[93 75 83 93 91 85 84 82 77 76 77 95 94 89 91];
x2=[88 86 83 96 81 79 97 78 75 67 69 68 84 83 81];
93
75
83
93
91
85
84
82
77
76
77
95
94
89
91
88
86
83
96
81
79
97
78
75
67
69
68
84
83
81
75
66
85
70
94
84
83
82
80
78
74
73
76
70
86
76
90
89
71
66
86
73
80
94
79
78
77
63
53
55
(1)计算均值,标准差,极差,偏度,峰度,画出直方图;
(2)检验分布的正态性;
检验结果
(1)布尔变量h=0,表示不拒绝零假设,说明提出的假设学生成绩均值80是合理的。
(2)95%的置信区间为[77.6,82.6],它完全包括80,且精度很高。
(3)sig的值为0.9367,远超过0.5,不能拒绝零假设。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数学建模与实践
我们选择的题号是(1题/2题/3题/4题): 4
小组队员:
1. 学院城市专业班级电信1212 姓名卢敏签名
2. 学院城市专业班级测绘1211 姓名何帅帅签名
3. 学院城市专业班级测绘1211 姓名章婷婷签名
牛奶制品的生产最优化模型
作者:卢敏何帅帅章婷婷
摘要
随着社会的发展,人们的生活水平逐渐提高,对奶制品的要求也不断提高本文以牛奶制品加工厂的生产实际为背景, 经过简化提出了安排奶制品生产计划中的一些问题, 利用优化方法建立数学模型, 并根据模型求解结果给出了奶制品加工计划的设计方案
目的就是合理分配资源,让企业获取最大利润。
根据本题的基本信息,提出奶制品的生产模型,这个优化问题的目标时使每天的获利最大,要作的决策时生产计划,即每天用多少桶牛奶生产A1,用多少桶牛奶生产A2,但存在着几个问题的制约,按照题目所给,将决策变量、目标函数和约束条件用数学符号及式子表示出来,就可得到模型最优解,解决实际问题,使资源分配合理,并利用效益最大化。
关键词
生产计划最优解线性规划
MATLAB软件 Novoasoft ScienceWord 5.0软件
问题再现
一奶制品加工厂用牛奶生产A1、A2两种奶制品,1桶牛奶可以在设备甲上用12小时加工成3公斤A1,或者在设备乙上用8小时加工成5公斤A2。
根据市场需求,生产的A1、A2全部能售出,且每公斤A1获利30元,每公斤A2获利15元。
现在加工厂每天能得到50桶牛奶的供应,每天工人总的劳动时间为480小时,并且设备甲每天至多能加工100公斤A1,设备乙的加工能力没有限制。
(1)试为该厂制订一个生产计划,使每天获利最大。
(2)35元可买到1桶牛奶,买吗?
问题分析
问题一 这个优化问题的目标是使每天的获利最大,要作的决策是生产计划,即每天用多少桶牛奶生产1A ,用多少桶牛奶生产2A ,决策受到3个条件的限制:原料(牛奶)供应、劳动时间、设备甲的加工能力.
模型假设
许多实际的优化问题的数学模型都是线性规划(特别是在像生产计划这样的经济管理领域),这不是偶然的.让我们分析一下线性规划具有哪些特征,或者说:实际问题具有什么性质,其模型才是线性规划.
比例性:每个决策变量对目标函数的“贡献”,与该决策变量的取值成正比;每个决策变量对每个约束条件右端项的“贡献”,与该决策变量的取值成正比。
可加性:各个决策变量对目标函数的“贡献”,与其它决策变量的取值无关;各个决策变量对每个约束条件右端项的“贡献”,与其它决策变量的取值无关.
连续性:每个决策变量的取值是连续的.
比例性和可加性保证了目标函数和约束条件对于决策变量的线性性,连续性则允许得到决策变量的实数最优解.
对于本例,能建立上面的线性规划模型,实际上是事先作了如下的假设: 1) 1A ,2A 两种奶制品每公斤的获利是与它们各自产量无关的常数,每桶牛奶加工出1A ,2A 的数量和所需的时间是与它们各自的产量无关的常数;
2) 1A ,2A 每公斤的获利是与它们相互间产量无关的常数,每桶牛奶加工出1A ,2A 的数量和所需的时间是与它们相互间产量无关的常数;
3)加工1A ,2A 的牛奶的桶数可以是任意实数.
这3条假设恰好保证了上面的3条性质.当然,在现实生活中这些假设只是近似成立的,比如,1A ,2A 的产量很大时,自然会使它们每公斤的获利有所减少.
由于这些假设对于书中给出的、经过简化的实际问题是如此明显地成立,本章下面的例题就不再一一列出类似的假设了.不过,读者在打算用线性规划模型解决现实生活中实际问题时,应该考虑上面3条性质是否近似地满足.
模型建立
由上述问题分析可建立加工奶制品的生产计划的模型并进行求解:
设每天用x1桶牛奶生产A1,用x2桶牛奶生产A2;每天获利为z 元.x1桶牛奶可生产3x1公斤A1,获利30*3x1,x2桶牛奶可生产5x2公斤A2,获利15*5x2,z=90x1+75x2;
我们的目标是求出当x1,x2满足下列约束条件时z 的最大值,及相应的x1,x2的取值。
约束条件为:
1.原料供应:生产A1,A2的总加工时间不得超过每天正式工人总的劳动时间,即12x1+8x2≤480小时;
2.劳动时间:生产A1,A2的原料(牛奶)总量不得超过每天的供应,即x1+x2≤50桶;
3.设备能力:A1的产量不得超过甲类设备每天的加工能力,即3x ≤100;
4.非负约束:x1,x2均不能为负值,即x1>=0,x2>=0.
由此得基本模型:
Max z=90x1+75x2
S .t .x1+x2≤50
12x1+8x2≤480
3x1≤100
x1≥0,x2≥0.
符号说明
模型求解与检验
图解法:这个线性规划模型的决策变量为2维,用图解法既简单,又便于直观地把握线性规划的基本性质.将约束条件(2)~(5)中的不等号改为等号,可知它们是1Ox ,2x 平面上的5条直线,依次记为1L ~5L ,如图1.其中4L ,5L 分别是工2x 轴和1x 轴,并且不难判断,(2)~(5)式界定的可行域是5条直线上的线段所围成的5边形OABCD .容易算出,5个顶点的坐标为:O(0,0),A(0,50),B(20,
30),C(100/3,10),D(100/3,0).
制作此图利用的是 Novoasoft ScienceWord 5.0软件
当目标函数Z 过点(20,30)取得最优解,即为最优解:1x =20,
2x =30.Z=4050 我们直观地看到,由于目标函数和约束条件都是线性函数,在2维情形,可行域为直线段围成的凸多边形,目标函数的等值线为直线,于是最优解一定在凸多边形的某个顶点取得.推广到n 维情形,可以猜想,最优解会在约束条件所界定的一个凸多面体 (可行域)的某个顶点取得.线性规划的理论告诉我们,这个猜想是正确的.
一般法:根据约束条件,用MATLAB软件进行求解,编写M-脚本文件代码输入MATLAB中即可得到最优解。
编写M-脚本文件如下:
f=[-90 -75];
A=[1 1;12 8;3 0];B=[50;480;100];
C=[]; D=[];
xm=[0;0]; xM=[inf;inf;1;inf]; x0=[];
x=linprog(f,A,B,C,D,xm,xM,x0)
根据多项式的曲线拟合原理,其本身就体现了最小二乘法,在拟合多项式最高次数的选择上,我们更是多次试验,择优而选择,使其更加逼近以前的数据。
所以说,从最小二乘法原理方面检验,它的误差是在ɑ=0.05之内的,模型可行。
问题二:35元可买到1桶牛奶,买吗?
增加以单位的原料产生的利润大于35,所以买
结论及应用
本模型的优点:
1.在数据处理上,采用简单的数据处理,解决了实际的奶制品的生产与销售模型。
2.在此题求解过程中,假设多个变量,考虑到多个因素的存在,运用了多种可能的模型,,使得问题的求解的合理性大为提高。
本模型的不足点:
本模型采用多项式进行曲线拟合,但并没有论证它的优越性,而且也有可能出现多种最优解,也没有考虑是否有更好的拟合函数
模型推广:企业内部的生产计划有各种不同的情况。
从空间层次看,在工厂级要根据外部需求和内部设备、人力、原料等条件,以最大利润为目标制订产品的生产计划,在车间级则要根据产品生产计划、工艺流程、资源约束及费用参数等,以最小成本为目标制订生产作业计划。
从时间层次看,若在短时间内认为外部需求和内部资源等不随时间变化,可制订单阶段生产计划,否则就要制订多阶段生产计划。
参考文献
[1] 韩中庚, 姜启源. 奶制品加工计划的设计模型[J] . 信息工程大学学报, 2002
[2]姜启源等,数学模型,第三版,北京:高等教育出版社
[3]刘卫国等,Matlab程序设计与应用(第二版),北京:高等教育出版社
[4]萧树铁. 数学实验[M] . 北京: 高等教育出版社, 19991
[5]薛定宇,基于MATLAB/ Simlink的系统仿真技术与应用(第二版),北京,清华大学出版社,2011
附录:
用MATLAB软件求解问题:加工奶制品的生产计划的程序如下
编写M-脚本文件如下:
f=[-90 -75];
A=[1 1;12 8;3 0];B=[50;480;100];
C=[]; D=[];
xm=[0;0]; xM=[inf;inf;1;inf]; x0=[];
x=linprog(f,A,B,C,D,xm,xM,x0)。