机器人运动学.ppt
合集下载
机器人技术基础课件第三章-机器人运动学精选全文完整版
03T 01T12T 23T
如此类推,对于六连杆机器人,有下列矩阵:
06T 01T 12T 23T 34T 45T 56T
3.2 3.2 机械手运动学方程
26
0 6
T
3.1.4 连杆变换矩阵及其乘积
06T 01T12T 23T 34T 45T 56T
机器人运动学方程
此式右边表示了从固定参考系到手部坐标系的各连杆
一个六连杆机械手可具有六个自由度,每个连杆含 有一个自由度,并能在其运动范围内任意定位与定向。 其中三个自由度用于规定位置,而另外三个自由度用 来规定姿态。
8
3.1.1 连杆坐标系
机械手的运动方向
机器人手部的位置和姿态也可以
用固连于手部的坐标系{B}的位姿
来表示
关节轴为ZB, ZB轴的单位方向 矢量α称为接近矢量,指向朝外。
(1) 坐标系{i-1}绕xi-1轴转角αi-1,使Zi-1与Zi平行,算子为Rot(x, αi-1) ; (2) 沿Xi-1轴平移ai-1,使Zi-1和Zi共线, 算子为Trans(ai-1,0,0); (3)绕Zi轴转角θi; 使得使Xi-1与Xi平行, 算子为Rot(z,θi);
(4) 沿Zi轴平移di。使得i-1系和i系重合, 算子为Trans(0,0,di)。
3.2.1 机器人正运动学方程
连杆 i 1
2
3
连杆长 度ai-1
0
a0
a1
连杆偏距 di 0
0
d2
连杆扭角 αi-1 00
00
-900
关节角 θi
θ1(00) θ2(00) θ3(00)
3.2.1 机器人正运动学方程
该3自由度机器人的运动学方程为:
如此类推,对于六连杆机器人,有下列矩阵:
06T 01T 12T 23T 34T 45T 56T
3.2 3.2 机械手运动学方程
26
0 6
T
3.1.4 连杆变换矩阵及其乘积
06T 01T12T 23T 34T 45T 56T
机器人运动学方程
此式右边表示了从固定参考系到手部坐标系的各连杆
一个六连杆机械手可具有六个自由度,每个连杆含 有一个自由度,并能在其运动范围内任意定位与定向。 其中三个自由度用于规定位置,而另外三个自由度用 来规定姿态。
8
3.1.1 连杆坐标系
机械手的运动方向
机器人手部的位置和姿态也可以
用固连于手部的坐标系{B}的位姿
来表示
关节轴为ZB, ZB轴的单位方向 矢量α称为接近矢量,指向朝外。
(1) 坐标系{i-1}绕xi-1轴转角αi-1,使Zi-1与Zi平行,算子为Rot(x, αi-1) ; (2) 沿Xi-1轴平移ai-1,使Zi-1和Zi共线, 算子为Trans(ai-1,0,0); (3)绕Zi轴转角θi; 使得使Xi-1与Xi平行, 算子为Rot(z,θi);
(4) 沿Zi轴平移di。使得i-1系和i系重合, 算子为Trans(0,0,di)。
3.2.1 机器人正运动学方程
连杆 i 1
2
3
连杆长 度ai-1
0
a0
a1
连杆偏距 di 0
0
d2
连杆扭角 αi-1 00
00
-900
关节角 θi
θ1(00) θ2(00) θ3(00)
3.2.1 机器人正运动学方程
该3自由度机器人的运动学方程为:
第二章 机器人运动学PPT课件
系的位置矢量 AP、BP具有如下变换关系
APB ARBPAPBO
(2-1-12)
15
ZA {A}
OA XA
ZB
ZC {C}
{B}
AP
BP YB
OB(OC)
YC
P A
BO XC YA
XB
图2.1.4 平移加旋转变换 注:坐标系{C}为过渡坐标系
16
2.齐次变换
一般情况下,刚体的运动是转动和平移的复合运 动,为了用同一矩阵既表示转动又表示平移,因此引 入齐次坐标变换矩阵。
28
X
偏转
Z
横滚
O船
Y
俯仰
偏转
X
Z
横滚
O
夹手
Y
俯仰
(a)
(b)
图2.1.11 RPY角的定义
29
§2.2 操作臂运动学
一、机械手位置和姿态的表示
图2.2.1所示为机器人的一个机械手。 描述机械手方位的坐标系置于手指尖的 中 位心置,可其以用原矢点量由矢p在量固p表定示坐。标机系械的手坐的标 表示为
H
0
1
0
b
称为平移的齐次变换矩阵,又可表示为
0 0 1 c
0
0
0
1
HTraa,b n,c)s。(矩阵中的第四列为平移参考矢量的齐次坐标。
19
Z
V
U
P
O
Y
X 图2.1.5 平移的齐次变换
20
例平2移.1,求向平量移U 后i得3到j的5k向沿量向V量 。P 3i7jk
解:
1 0 0 3 1 4
系,首先需要用两个参数对每个连杆进行描述。 如图2.2.2所示,对于任意一个两端带有关节i和
机器人学导论--ppt课件可编辑全文
关节变量
ppt课件
2
1.2 描述:位置、姿态和坐标系
位置描述
一旦建立坐标系,就能用一
个3*1的位置矢量对世界坐标 系中的任何点进行定位。因 为在世界坐标系中经常还要 定义许多坐标系,因此在位 置矢量上附加一信息,标明 是在哪一坐标系中被定义的。
例如:AP表示矢量P在A坐标系中的表示。
BP 表示矢量P在B坐标系中的表示。
c os90
c os120 c os30 c os90
XB XA
X
B
YA
X B Z A
c os90 c os90 cos0
]
YB X A YB YA YB Z A
ZB XA
ZB
YA
ZB Z A
ppt课件
5
坐标系的变换
完整描述上图中操作手位姿所需的信息为位置和姿态。机器人学中
在从多重解中选择解时,应根据具体情况,在避免碰撞的前 提下通常按“最短行程”准则来选择。同时还应当兼顾“多 移动小关节,少移动大关节”的原则。
ppt课件
23
4 PUMA560机器人运动学反解-反变换法
❖ 由于z4 , z5, z6 交于一点W,点W在基础坐标系中的位置仅与 1,2,3
有关。据此,可先解出 1,2,3 ,再分离出 4 ,5,6 ,并逐
PUMA560变换矩阵
ppt课件
21
将各个连杆变换矩阵相乘便得到PUMA560手臂变换矩阵
06T 01T (1)21T (2 )23T (3 )34T (4 )45T (5 )56T (6 )
什么是机器人运动学正解? 什么是机器人运动学反解?
ppt课件
22
操作臂运动学反解的方法可以分为两类:封闭解和数值解、 在进行反解时总是力求得到封闭解。因为封闭解的计算速度 快,效率高,便于实时控制。而数值法不具有些特点为。 操作臂的运动学反解封闭解可通过两种途径得到:代数解和 几何解。 一般而言,非零连杆参数越多,到达某一目标的方式也越多, 即运动学反解的数目也越多。
机器人运动学ppt
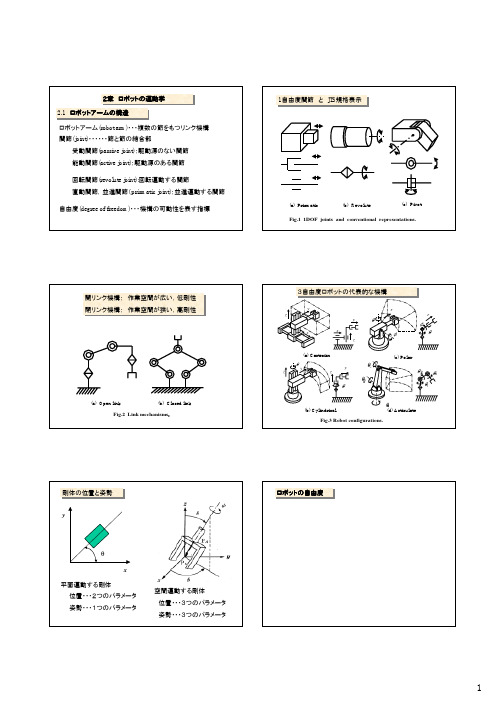
2章 ロボットの運動学
2章 ロボットの運動学2.1 ロボットアームの構造ロボットアームの構造
2.1 ロボットアームの構造ロボットアームの構造ロボットアーム(robot arm)・・・複数の節をもつリンク機構1自由度関節 と JIS 規格表示
1自由度関節 と JIS 規格表示開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性
開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性r
y
3自由度ロボットの代表的な機構
3自由度ロボットの代表的な機構剛体の位置と姿勢剛体の位置と姿勢ロボットの自由度
ロボットの自由度
空間リンク機構(ロボット)の可動度(mobility)
空間リンク機構(ロボット)の可動度(mobility)平面運動機構の自由度と可動度の例
平面運動機構の自由度と可動度の例パラレルリンク機構の自由度と可動度
パラレルリンク機構の自由度と可動度ロボットの座標系(coordinate system)
ロボットの座標系(coordinate system)座標系の平行移動
座標系の平行移動座標系の回転移動
座標系の回転移動
座標系の平行移動と回転移動座標系の平行移動と回転移動
z A
姿勢表現・・・zyzオイラー角
姿勢表現・・・zyzオイラー角
姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)
z。
第七章 机器人运动学ppt课件

Ai Ai-1
编辑版pppt
8
➢ 杆件参数的定义—— 、li 、 i 和di i
由运动学的观点来看,杆件保持其两端关节间的形态
不变,这种形态由两个参数决定:杆件长度 li 和杆件扭
转角 i 。杆件的相对位置关系,由另外两个参数决定:
杆件的距离 di 和杆件的回转角 i 。
li — 关节 Ai 轴和 Ai+1 轴线公法线的长度。
li
i zi
yi
xi oi
绕 xi 轴转 i 角度,两
坐标系完全重合.
li 1
di
zi1 oi1
yi1
i
xi1
i 1 A i R ( z i 1 ,i ) T r a n s ( z i 1 , d 编i ) 辑T 版pr ppa t n s ( x i , l i ) R ( x i ,i )
机器人技术及空间应用
第七章 机器人运动学
机器人运动学主要是把机器人相对于固定参考 系的运动作为时间的函数进行分析研究,而不 考虑引起这些运动的力和力矩 将机器人的空间位移解析地表示为时间的函数, 特别是研究机器人关节变量空间和机器人末端 执行器位置和姿态之间的关系 本章将讨论机器人运动学几个具有实际意义的 基本问题。
• 并联机器人:刚性好,负载大,误差不积累,工作空间 小,姿态范围不大。
• 本章讲解以串联机器人为主。
编辑版pppt
3
§7.1.2 运动学研究的问题
Where is my hand?
Direct Kinematics HERE!
运动学正问题
运动学逆问题
How do I put my hand here?
ny
z
n0x
编辑版pppt
8
➢ 杆件参数的定义—— 、li 、 i 和di i
由运动学的观点来看,杆件保持其两端关节间的形态
不变,这种形态由两个参数决定:杆件长度 li 和杆件扭
转角 i 。杆件的相对位置关系,由另外两个参数决定:
杆件的距离 di 和杆件的回转角 i 。
li — 关节 Ai 轴和 Ai+1 轴线公法线的长度。
li
i zi
yi
xi oi
绕 xi 轴转 i 角度,两
坐标系完全重合.
li 1
di
zi1 oi1
yi1
i
xi1
i 1 A i R ( z i 1 ,i ) T r a n s ( z i 1 , d 编i ) 辑T 版pr ppa t n s ( x i , l i ) R ( x i ,i )
机器人技术及空间应用
第七章 机器人运动学
机器人运动学主要是把机器人相对于固定参考 系的运动作为时间的函数进行分析研究,而不 考虑引起这些运动的力和力矩 将机器人的空间位移解析地表示为时间的函数, 特别是研究机器人关节变量空间和机器人末端 执行器位置和姿态之间的关系 本章将讨论机器人运动学几个具有实际意义的 基本问题。
• 并联机器人:刚性好,负载大,误差不积累,工作空间 小,姿态范围不大。
• 本章讲解以串联机器人为主。
编辑版pppt
3
§7.1.2 运动学研究的问题
Where is my hand?
Direct Kinematics HERE!
运动学正问题
运动学逆问题
How do I put my hand here?
ny
z
n0x
1(第二章机器人运动学)PPT课件

第二章 机器人运动学
(Robot Kinematics) (Manipulator Kinematics)
刘志远、刘海峰
30.10.2020
1
Degree of Freedom (DOF)
30.10.2020
end-effector
2
机器人各连杆视作刚体
g2 (t) Joint angle Link g1(t)
U
system (OXYZ)
x
– Rotated coordinate system (OUVW)
U
A point P in the space can be represented by its coordinates
x
with respect to both coordinate systems.
正交变换
30.10.2020
11
Remark: geometric interpretation of rotation matrices.
Z W
p pu pv pw T
Z W
T
pw pv
p pu
O
U X
Y
V
O
X
U
V Y
px pu
pu
py
R
pv
r1
r2
r3
pv
p 30.10.2020
Actuator
End-effector
关g (节t) 角[g 1 g((tt))g [g 2( 1t() t) g g n 2 (t(t))T T ] ]。若为n自由度的机械手则
30.10.2020
3
2.1 引言(Introduction)
(Robot Kinematics) (Manipulator Kinematics)
刘志远、刘海峰
30.10.2020
1
Degree of Freedom (DOF)
30.10.2020
end-effector
2
机器人各连杆视作刚体
g2 (t) Joint angle Link g1(t)
U
system (OXYZ)
x
– Rotated coordinate system (OUVW)
U
A point P in the space can be represented by its coordinates
x
with respect to both coordinate systems.
正交变换
30.10.2020
11
Remark: geometric interpretation of rotation matrices.
Z W
p pu pv pw T
Z W
T
pw pv
p pu
O
U X
Y
V
O
X
U
V Y
px pu
pu
py
R
pv
r1
r2
r3
pv
p 30.10.2020
Actuator
End-effector
关g (节t) 角[g 1 g((tt))g [g 2( 1t() t) g g n 2 (t(t))T T ] ]。若为n自由度的机械手则
30.10.2020
3
2.1 引言(Introduction)
工业机器人的运动学PPT课件

系{B}的位姿来表示,如图所示。
手部的位姿可用(4×4)矩阵 表示为:
nx ox ax px [ n o a p ]= ny oy ay py
nz oz az pz 0 001
精选PPT课件
10
例2-3 图表示手部抓握物体 Q ,物体为边长2个单位的 正立方体,写出表达该手部位姿的矩阵式。
解
因为物体 Q 形心与手部坐标系 O ′X ′Y′ Z′的坐标原点 O ′相重合,所 以手部位置的(4×1)列阵为
定坐标系中的位置可用A1和A2的乘积来表示:T2 =A1A2。 若A3矩阵表示第三个连杆坐标系相对于第二个连杆坐标系
的位置,则有:T3=A1A2A3。如此类推,对于六连杆机器人,有 下列T6矩阵:T6=A1A2A3A4A5A6 。
cθn -sθncαn sθnsαn ancθn
= sθn cθncαn -cθnsαn ansθn
0
sαn
cαn
dn
0
0
0 1 精选PPT课件
18
2.4 工业机器人运动学方程
一 机器人运动学方程
通常把描述坐标系与下一个连杆间的相对关系的齐次变换
矩阵叫做A变换矩阵或A矩阵。如果A1矩阵表示第一个连杆坐 标系相对于固定的坐标系的位置,A2矩阵表示第二个连杆坐标 系相对第一连杆坐标系的位置,那么第二个连杆坐标系 在固
解
XB的方向列阵: n=[cos30°cos60°cos90°0] T
=[0.866 0.500 0.000 0] T
YB的方向列阵: o=[cos120°cos30°cos90°0] T
=[-0.500 0.866 0.000 0] T
ZB的方向列阵: a =[0.000 0.000 1.000 0] T
手部的位姿可用(4×4)矩阵 表示为:
nx ox ax px [ n o a p ]= ny oy ay py
nz oz az pz 0 001
精选PPT课件
10
例2-3 图表示手部抓握物体 Q ,物体为边长2个单位的 正立方体,写出表达该手部位姿的矩阵式。
解
因为物体 Q 形心与手部坐标系 O ′X ′Y′ Z′的坐标原点 O ′相重合,所 以手部位置的(4×1)列阵为
定坐标系中的位置可用A1和A2的乘积来表示:T2 =A1A2。 若A3矩阵表示第三个连杆坐标系相对于第二个连杆坐标系
的位置,则有:T3=A1A2A3。如此类推,对于六连杆机器人,有 下列T6矩阵:T6=A1A2A3A4A5A6 。
cθn -sθncαn sθnsαn ancθn
= sθn cθncαn -cθnsαn ansθn
0
sαn
cαn
dn
0
0
0 1 精选PPT课件
18
2.4 工业机器人运动学方程
一 机器人运动学方程
通常把描述坐标系与下一个连杆间的相对关系的齐次变换
矩阵叫做A变换矩阵或A矩阵。如果A1矩阵表示第一个连杆坐 标系相对于固定的坐标系的位置,A2矩阵表示第二个连杆坐标 系相对第一连杆坐标系的位置,那么第二个连杆坐标系 在固
解
XB的方向列阵: n=[cos30°cos60°cos90°0] T
=[0.866 0.500 0.000 0] T
YB的方向列阵: o=[cos120°cos30°cos90°0] T
=[-0.500 0.866 0.000 0] T
ZB的方向列阵: a =[0.000 0.000 1.000 0] T
《机器人运动学》课件

机器人正向运动学建模
正向运动学
根据机器人关节参数,计算机器人末端执行器在笛卡尔坐标 系中的位置和姿态的过程。
正向运动学模型
描述机器人末端执行器位置和姿态与关节参数之间关系的数 学模型。
机器人逆向运动学建模
逆向运动学
已知机器人末端执行器在笛卡尔坐标系中的位置和姿态,求解机器人关节参数 的过程。
逆向运动学模型
02
它主要关注机器人在三维空间中 的位置和姿态,以及如何通过关 节运动来实现这些位置和姿态的 变化。
机器人运动学的研究内容
机器人位姿表示
研究如何用数学表达式表示机 器人在三维空间中的位置和姿
态。
运动学方程
建立机器人末端执行器位姿与 关节状态之间的数学关系,即 运动学方程。
运动学逆解与正解
研究如何通过给定的位姿求解 关节状态(逆解),以及如何 通过给定的关节状态求解位姿 (正解)。
关节坐标系
基于机器人关节建立的坐标系,常用于描述机器 人的关节运动状态。
工作坐标系
基于机器人工作需求建立的坐标系,常用于描述 机器人末端执行器的位置和姿态。
CHAPTER 03
机器人运动学建模
齐次变换与坐标变换
齐次变换
描述空间中物体位置和方向变化的数 学工具,包括平移和旋转。
坐标变换
将一个坐标系中的位置和方向信息转 换到另一个坐标系中的过程,涉及到 齐次变换的应用。
关节空间的轨迹规划
定义
关节空间是指机器人的各个关节角度 构成的坐标系,关节空间的轨迹规划 是指通过控制机器人的关节角度来实 现机器人的运动。
方法
常用的方法包括多项式插值、样条曲 线插值等,通过设定起始和目标位置 的关节角度,计算出一条平滑的关节 角度路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
zi zi-1
两个关节轴相交
xi
oi
yi
Oi— Ai与Ai+1关节轴线的交点
Zi— Ai+1轴线
Xi— Zi和Zi-1构成的面的法线
Ai+1
Yi— 右手定则
Ai
两个关节轴线平行
• 先建立
Ai-1
∑0i-1
• 然后建立 ∑0i+1
• 最后建立 ∑0i
Ai
Ai+1
Ai+2
yi-1 zi-1
li-1
oi-1xi-1
例题:
在机器人工作台上加装一电视摄像机,摄像机可见到固联 着6DOF关节机器人的机座坐标系原点,它也可以见到被操作 物体(立方体)的中心,如果在物体中心建一局部坐标系,则 摄像机所见到的这个物体可由齐次变换矩阵T1来表示,如果摄 像机所见到的机座坐标系为矩阵T2表示。
0 1 0 1
T1
1 0
0 0
D-H变换矩阵
c os i
i1 Ai
s
in
i
0
0
sini cosi cosi cosi
sin i
0
sini sin i cosi sin i
c os i
0
ai cosi
ai
s
in
i
di 1
机器人的运动学方程
0Ti
0 A1 1A2
A i1 i
运动学逆问题
▪ 多解性,剔除多余解原则
1
• di 是从第i-1坐标系
的原点到Zi-1轴和
Xi轴的交点沿Zi-1 Ai-1
轴测量的距离
• i 绕 Zi-1轴由Xi-1
轴转向Xi轴的关节
角
Ai
i
li
li1 di
i
坐标系的建立原则
Ai+
• 为右手坐标系
1
• 原点Oi:设在Li与
Ai+1轴线的交点上 • Zi轴:与Ai+1关节轴
Ai-1
Ai
O
a
z
ox yz
xn
nx sx ax px
实际要求 ny nz
sy sz
ay az
py pz
机T手爪
0
0
0
1
z物
z机 y机
O机
x物 O物 y物
a : 手爪开合方向与物体 y向重合 有s [ 1 0 0]T
b : 从上向下抓,指出手爪 的a方向物体z方向相反 则有a [0 0 1]T
特殊情况坐标系的建立原则
有:机T物 机T摄 摄T物 (T2)-1T1
ox yz
1 0 0 10 0 1 0 1
0 -1 0 20 1 0 0 10 0 0 -1 10 0 0 -1 9
z物
0 0
0
1
0
0
0
1
0 1 0 11 -1 0 0 10
0 0 1 1
z机 y机
O机
x物 O物 y物
0
00
1
∑O物根据T1画出
θi — 绕 zi-1 轴,由 xi-1转向 xi
杆件坐标系间的变换过程 -相邻关节坐标系的齐次变换
• 将xi-1轴绕zi-1轴转i 角度,将其与xi轴平行; • 沿zi-1轴平移距离di ,使zi-1轴与zi轴重合; • 沿xi轴平移距离Li,使两坐标系原点及x轴重
合; • 绕xi 轴转i角度,两坐标系完全重合.
机器人运动学
2005年3月24日
运动学正问题
▪ 杆件参数的意义 ▪ 坐标系的建立原则 ▪ 杆件坐标系间的变换过程-相邻关节坐标
系的齐次变换 ▪ 机器人的运动学方程
杆件参数的意义- li 和 i
串联关节,每个杆件最多与2个杆件相连,如Ai与Ai-1和 Ai+1相连。由运动学的观点来看,杆件的作用仅在于它能保 持其两端关节间的形态不变。这种形态由两个参数决定,一
ox yz
z物
z机 y机
O机
x物 O物 y物
则有a [0 0 1]T
c:
n
s
a
i 1
j 0
k
0
0i
j
0k
[0
1
0]T
0 0 1
0 1 0
因此:姿态矩阵为 1 0
0
0 0 -1
0 1 0 11
当手爪中心 与物体中心
机T物
1 0
0 0
0 10 -1 1
重合时Biblioteka 0001
y s
0 -1
10 9
0 0
0
1
1 0 0 -10
T2
0 0
-1 0
0 -1
20
10
0 0 0
1
x yz
• 试求立方体中心在机座坐标系∑0中的位置
• 该手爪从上方把物体抓起,同时手爪的开合方向与物体的Y轴同向, 那么,求手爪相对于∑0的姿态是什么?
解1:
已知 摄T物 T1 , 摄T机 T2 , 求机T物
di
A
C
zi oi di+1
B D
(yi) (yxiixil)i+1
zi+1 yi+1 oi+1xi+1
举例:Stanford机器人
• 为右手坐标系 • 原点Oi: Ai与Ai+1
关节轴线的交点 • Zi轴:与Ai+1关节轴
重合,指向任意 • Xi轴: Zi和Zi-1构
成的面的法线 • Yi轴:按右手定则
❖根据关节运动空间合适的解 ❖选择一个与前一采样时间最接近的解 ❖根据避障要求得选择合适的解 ❖逐级剔除多余解
▪ 可解性
❖所有具有转动和移动关节的系统,在一个单一串联中 总共有6个(或小于6个)自由度时,是可解的,一般 是数值解,它不是解析表达式,而是利用数值迭代原 理求解,它的计算量要比解析解大
❖如若干个关节轴线相交和或多个关节轴线等于0或90° 的情况下,具有6个自由度的机器人可得到解析解
重合,指向任意
i zi
yi
•
Xi轴:与公法线Li 重合,指向沿Li由
Ai轴线指向Ai+1轴线
• Yi轴:按右手定则
li
xi oi
li1 di
zi1 oi1
yi1
i
xi1
Li —沿 xi 轴, zi-1 轴与 xi 轴交点到 0i 的距离 αi — 绕 xi 轴,由 zi-1 转向zi di — 沿 zi-1 轴,zi-1 轴和 xi 交点至∑0i –1 坐标系原点的距离
A5
A6
y6
z6
O6
x6
z5
y5
O5
x5
A4
y3
d6
z3
O3
d3
z4
x3
A3
A2
O4
x2
x4
y4
z2
y2
A1
O2
o3 , o4 , o5重合 d4 d5 0
是杆件的长度 li(ai),一个是杆件的扭转角 i
Ai+
1
• li 关节Ai轴和Ai+1轴 线公法线的长度
• i 关节i轴线与i+1 Ai
轴线在垂直于li平面
i
内的夹角
li
杆件参数的意义- di和 i
确定杆件相对位置关系,由另外2个参数决定,一个是杆
件的距离:di ,一个是杆件的回转角:i
Ai+
因此物体位于机座坐标系的(11,10,1)T
处,它的X,Y,Z轴分别与机座坐标系的 ∑O机根据T2画出
-Y,X,Z轴平行。
解2:
nx sx ax px
实际要求 ny nz
sy sz
ay az
py pz
机T手爪
0
0
0
1
a : 手爪开合方向与物体 y向重合 有s [ 1 0 0]T
b : 从上向下抓,指出手爪 的a方向物体z方向相反